Figures & data
Figure 1. MMS for tunnel inspection.
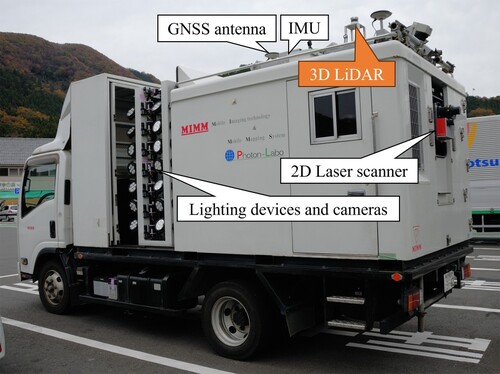
Table 1. Localization in tunnel using SLAM.
Table 2. Specifications of devices on MIMM.
Figure 2. Synchronization system for localization sensors.
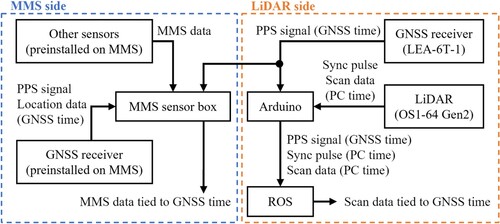
Figure 3. Appearance of the added hardware.
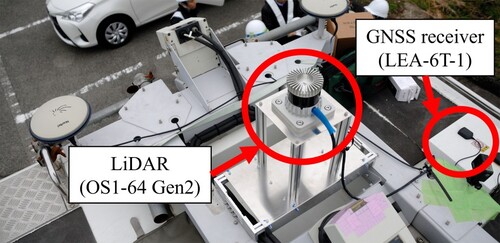
Table 3. Specifications of 3D LiDAR (OS1-64 Gen2).
Figure 4. Flow of proposed localization method in tunnels.
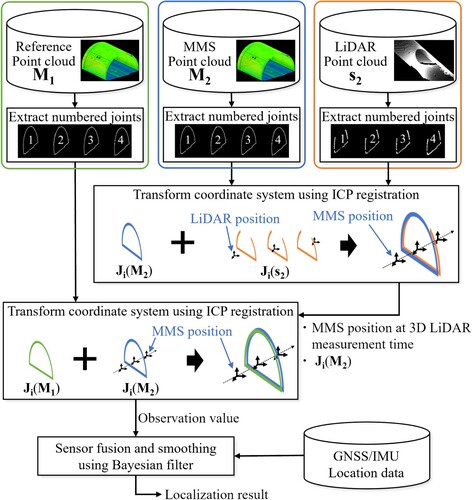
Figure 5. Example of joints in a tunnel.
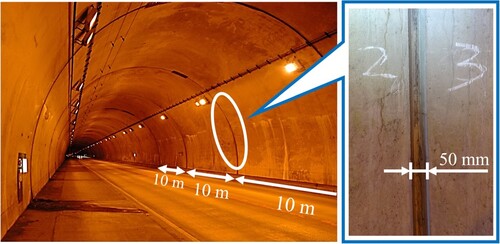
Figure 6. Align point cloud to the XY plane.
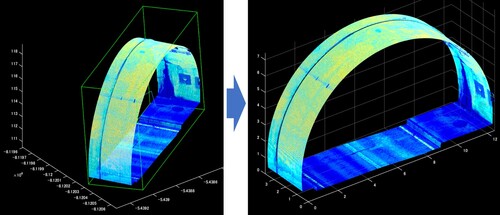
Figure 7. Extraction of candidate ancillary facility points.
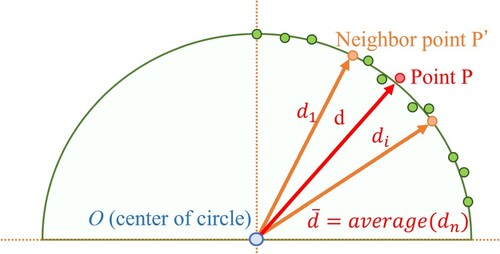
Figure 8. Extracted ancillary equipment point cloud.
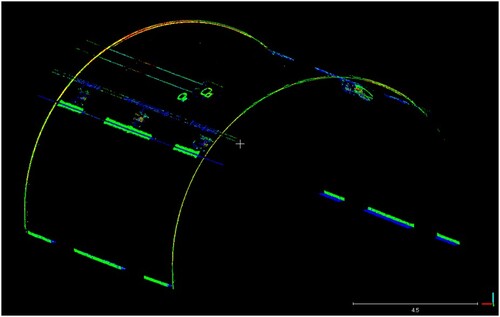
Figure 9. Joint extraction result from MMS point cloud.
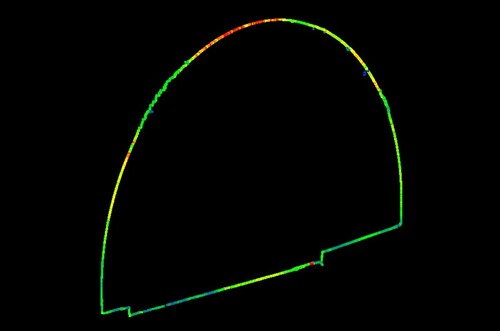
Figure 10. Assign numbers to joints in sequence.
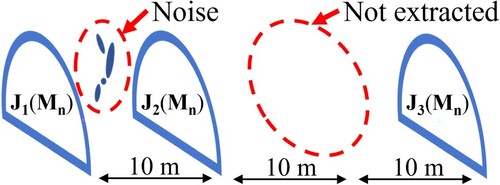
Figure 11. Distortion correction.
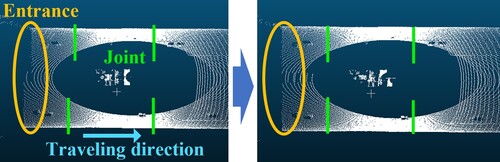
Figure 12. Curvature change point extraction per scan line.
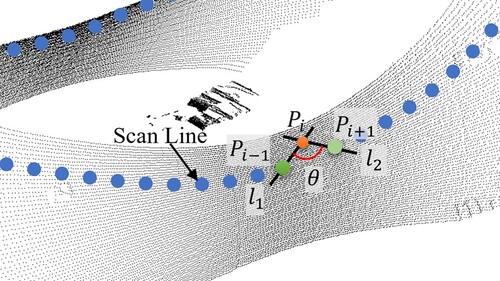
Figure 13. Thresholding based on cosine similarity.
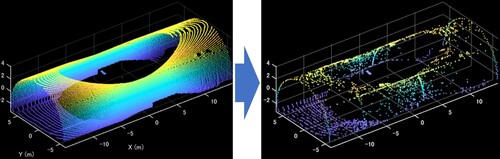
Figure 14. Joint extraction result from LiDAR point cloud.
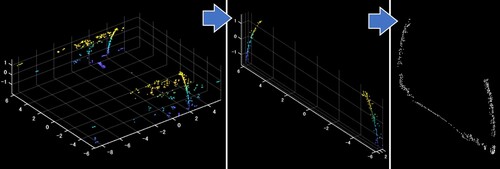
Figure 15. Experimental environment.
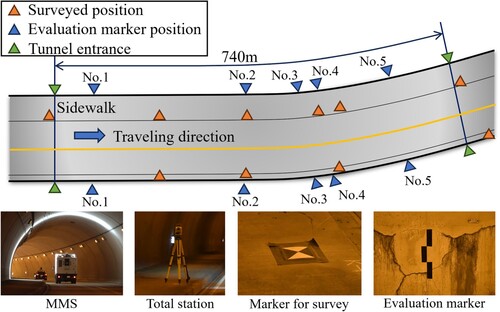
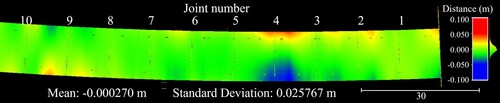
Figure 16. Comparison of evaluation marker positions.
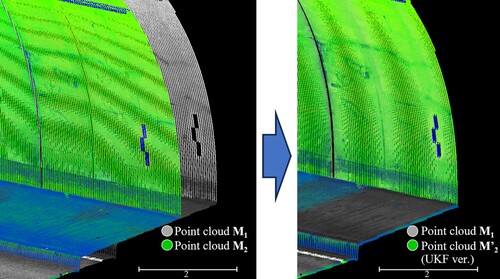
Table 4. Error comparison before and after correction.
Figure 17. Difference in colouration due to shape difference.
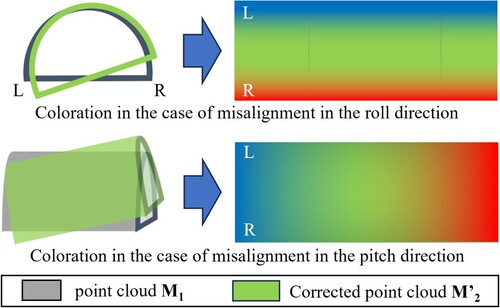
Figure 18. Uncorrected point cloud comparison.
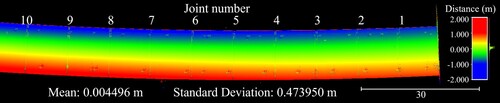
Figure 19. Corrected point cloud comparison (g-h Filter).
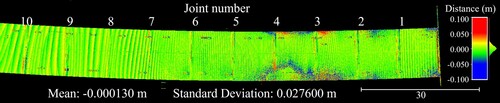
Figure 20. Corrected point cloud comparison (Particle Filter).
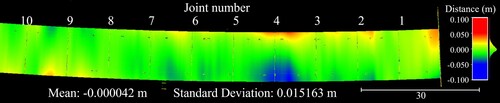
Figure 21. Corrected point cloud comparison (Extended Kalman Filter).
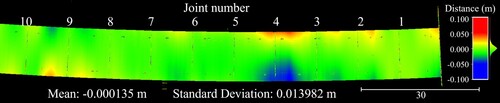
Figure 22. Corrected point cloud comparison (Unscented Kalman Filter).