

Abstract
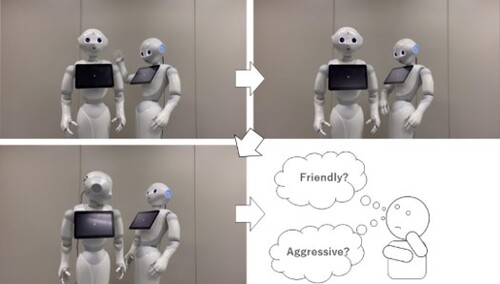
As a form of multiple-robot interaction, robot-robot interactions effectively provide indirect information, unlike direct interactions between people and robots. Even though numerous studies have affirmed this approach's effectiveness and the development of conversational mechanisms for robot-robot interaction, their physical interaction design has received inadequate attention. This study focuses on the impact of the speed of robots’ touching behaviours because people might perceive such relationships between robots differently due to various motion speeds, even with identical motions. We explored this issue by conducting two web-survey experiments and investigated the human perceptions of a robot's touching motion and the perceived relationship between two robots when one robot touches the other at different speeds. Experiment 1 identified two peak speeds at which people perceived a robot's touch as patting (a friendly touch) or slapping (an aggressive touch). Experiment 2 demonstrated similar peak speeds, where people perceived the robots’ relationships as either positive or negative in response to patting or slapping behaviours. We maintain that understanding the relationships between motion speeds and perceived friendliness between robots will significantly improve the design of physical interactions between robots.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Taichi Hirayama
Taichi Hirayama received a B.S. degree in 2022 from Doshisha University, Kyoto, Japan, where he is currently in the master’s programme. His research interests include social touch, social robots, and human-robot interaction.
Yuka Okada
Yuka Okada received an M. Eng. degree from Doshisha University, Kyoto, Japan in 2022. The affiliation of Doshisha University was at the time of contribution. Her research interests include social touch, social robots, and human-robot interaction. She is currently employed by the Yahoo! Japan Corporation.
Mitsuhiko Kimoto
Mitsuhiko Kimoto received M. Eng. and Ph.D. degrees from Doshisha University, Kyoto, Japan in 2016 and 2019. He is currently a research scientist in the Agent Interaction Design department at the Interaction Science Laboratories (ISL) and the Advanced Telecommunications Research Institute International (ATR). His research interests include human-robot interaction, human-agent interaction, and interactive AI.
Takamasa Iio
Takamasa Iio received a Ph.D. degree in 2012 from Doshisha University, Kyoto, Japan, where he is currently an associate professor. His research interests include social robotics, group conversation between humans and multiple robots, and the social behaviours of robots.
Katsunori Shimohara
Katsunori Shimohara received B.E. and M.E. degrees in Computer Science and Communication Engineering and a Doctor of Engineering from Kyushu University, Fukuoka, Japan in 1976, 1978, and 2000, respectively. From 2001 to 2006, he was the director of the Network Informatics Laboratories and the Human Information Science Laboratories at Advanced Telecommunications Research Institute International (ATR), Kyoto, Japan. He is a professor emeritus at Doshisha University, Kyoto, Japan. His research interests include community systems design, relationality design, and relationality-oriented systems design.
Masahiro Shiomi
Masahiro Shiomi received M. Eng. and Ph.D. degrees in engineering from Osaka University in 2004 and 2007, respectively. During that same time, he was an intern researcher at the Intelligent Robotics and Communication Laboratories (IRC). He is currently a group leader in the Agent Interaction Design department at the Interaction Science Laboratories (ISL) and the Advanced Telecommunications Research Institute International (ATR). His research interests include human-robot interaction, social touch, robotics for childcare, networked robots, and field trials.