

Abstract
This paper presents a motion sensor-based haptic master controller capable of static and dynamic force presentation by the newly invented Finger Band Soft Actuator (FBSA). The master controller operates a surgical assist robot using the degrees of freedom position and posture data tracked by an optical motion capture. The haptic force presentation can be realized by the pneumatic pressure of FBSA, which can be highly integrated into the controller mechanism to maintain precise manipulability. The FBSA can present a pressing force of 3.7 N for a small-sized finger and 5.1 N for a large-sized finger at an internal pressure of 60 kPa, and there is a monotonically increasing and decreasing relationship between the air pressure and the pressing force. The effectiveness of haptic force presentation by the FBSA was experimentally evaluated in the master-follower operation of a surgical assist robot. Ten subjects performed the task of pulling a suture thread and controlled the manipulation to achieve the directed tension. The experimental result shows that with the four levels of force presentation scheme by the FBSA, the error between suture tension and target operating force is significantly smaller than without force presentation.
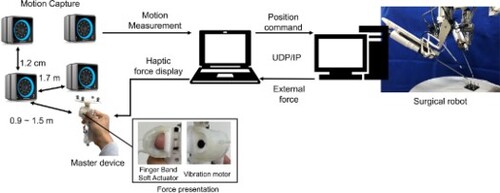
GRAPHICAL ABSTRACT
Acknowledgments
The authors are grateful to Dr. Takahiro Kanno for helpful advice and discussions. A part of this work was supported by RIVERFIELD Inc.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Notes on contributors
Yuta Soga
Yuta Soga received his associate degree in mechanical engineering from the National Institute of Technology, Tokyo College in 2022 and his Bachelor's degree in Emerging Multi-Interdisciplinary Engineering from the University of Electro-Communications, Tokyo, Japan in 2024. He is currently in the Master's program at the Graduate School of Informatics and Engineering of the same university. Since 2023, he has also been a research student at the Department of Neurophysiology, National Institute of Neuroscience, Japan. His research interests include neuroscience.
Soichiro Hano
Soichiro Hano received his associate degree in mechanical engineering from the National Institute of Technology, Tokyo College in 2023. He is currently pursuing his Bachelor's degree at the Department of Mechanical Engineering, Toyohashi University of Technology. His research interests include soft robotics.
Daisuke Haraguchi
Daisuke Haraguchi received his Ph.D. degree from the Tokyo Institute of Technology in 2013. After working as a Research Associate at the same university, in 2014, he co-founded RIVERFIELD, a startup specializing in surgical assist robots. In 2018, he became an Associate Professor at the Institute of Innovative Research, Tokyo Institute of Technology. Currently, he serves as an Associate Professor in the Department of Mechanical Engineering at the National Institute of Technology, Tokyo College. His research interests include surgical robots, motion control, telerobotics, haptics, manipulation, and field robots.