
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
Steady states of dynamical systems, whether stable or unstable, are critical for understanding future evolution. Robust steady states, ones that persist under small changes in the model parameters, are desired when modelling ecological systems, where it is common for accurate and detailed information on functional form and parameters to be unavailable. Previous work by Jahedi et al. [Robustness of solutions of almost every system of equations, SIAM J. Appl. Math. 82(5) (2022), pp. 1791–1807; Structured systems of nonlinear equations, SIAM J. Appl. Math. 83(4) (2023), pp. 1696–1716.] has established criteria to imply the prevalence of robust steady states for systems with minimal predetermined structure, including conventional structured systems. We review that work and extend it by allowing symmetries in the system structure, which present added obstructions to robustness.
1. Introduction
Steady states are rest points of dynamical processes. In ecological models, they represent states of balance in a natural system, for example between competing or cooperating species. There is often significant uncertainty in the specific details of model equations of natural systems [Citation4]. Yet some basic properties of the model are independent of these details, at least for generic implementations of the underlying structure of the equations.
Because of this, systems with structure form a convenient context for modelling biological systems under uncertain conditions. By structure, we mean the interconnections allowed between different entities and possible symmetries among these interconnections. The permissible systems for each fixed structure form a vector space, so that we can use the concept of prevalence [Citation6] to discuss properties that are almost always certain to occur. In this article, we will begin by reviewing recent work on guaranteeing the robustness of solutions for typical systems, in the sense of prevalence, with a given structure. It was shown in [Citation8] that robustness in structured systems is equivalent to the absence of a bottleneck in the graph-theoretic representation of the system. Using this as a starting point, we generalize the concept of bottleneck to a more general form called a ‘shortfall’, which identifies obstructions to robustness in structured systems with symmetries. We also show how to locate shortfalls, which helps to localize parts of the system that cause rank deficiency in the Jacobian matrix of the steady state.
Section 2 presents the background on structured systems based on recent work in [Citation7, Citation8]. Structured systems, as conventionally considered, allow only certain variables to occur in specified equations. Section 3 discusses bottlenecks, which are the only obstructions to robustness in structured systems. In Section 4, we investigate a more general context where not only are certain variables restricted from appearing, but we can impose linear constraints, which we call symmetries, on the allowed variables. In this more general situation, shortfalls generalize bottlenecks. In Section 5, we discuss the results and outlook for future research.
2. Background and previous work
In this section, we give a brief synopsis of the results of [Citation7, Citation8] that will be generalized in the following section. The main context of the work was to examine typical behaviour in ‘structured systems’, where by definition, only specified variables are allowed in each equation. (Allowing all variables in all equations is a special case.) An example of a structured system of differential equations is (1)
(1) We will primarily be concerned with properties of steady states, so in fact we will usually consider setting the left side to zero, which yields the structured system of nonlinear equations
(2)
(2)
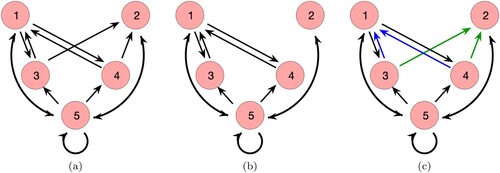
Structured systems can be represented by directed graphs, as shown in Figure . We draw an edge from node i to node j if variable i is allowed to appear in equation j. Figure (a) is a representation of the system (Equation2(2)
(2) ). In some modelling scenarios, the directed graph representation may summarize almost all of the information known to the modeller, for example, which species relies on another for population changes. In such cases, it is even more important to understand generic behaviour that is independent of specific details.
Figure 1. Graphical representations of structured systems and symmetric structures. (a) Robust structured system corresponding to Equation (Equation2(2)
(2) ), or equivalently, relation (Equation6
(6)
(6) ). (b) Removing two edges results in a fragile system corresponding to relations (Equation6
(6)
(6) ) and (Equation7
(7)
(7) ). (c) A symmetric structure, as discussed in Section 4. Blue pairs and green pairs are matched Jacobian entries.
We will define the robustness of solutions of systems of nonlinear equations as follows.
Definition 2.1
Let be a
function and assume U is an open subset of
. Write
. We say a point x is robust for F if
has rank M, and x is fragile if it is not robust. For p in U, we define the solution set
(3)
(3) to be robust if every
SolSet(p) is robust.
The property of robustness guarantees that a small variation in the model equations does not destroy the steady-state solution. When modelling physical systems, this is a highly desirable property. A solution that exists for a given choice of parameters, but does not persist for nearby values, is likely to fail to successfully represent natural behaviour, where parameter and model uncertainty are significant factors. The Implicit Function Theorem guarantees continued existence of a robust solution under small uncertainty: If the Jacobian of the system at the solution has full rank, the Implicit Function Theorem says that the solution extends to small perturbations of the system. In [Citation7], this local result was extended to a global version, which we describe next.
Let be an open set, and let
be any vector space of
functions
representing a structured system, meaning that only certain variables are allowed to appear in each equation. Assume also that
contains all linear functions that respect the structure. Due to this assumption and the fact that U is open, there is a maximum possible rank of the Jacobian of the system on U, which depends only on the structure; we denote this rank by r. (See Definition 2.5 for a rigorous definition.) Then Theorem 2.13 of [Citation7] says the following.
Theorem 2.2
For almost every and almost every
, SolSet(p) is a
-manifold of dimension N−r and for all
,
has kernel of dimension N−r.
The ‘almost every’ F in the theorem refers to the notion of prevalence [Citation6]. The definition of a prevalent set in a function space such as is designed to transfer some of the properties of full Lebesgue measure in
to infinite-dimensional vector spaces. In fact, prevalent implies dense, is translation-invariant, and agrees with Lebesgue measure in finite-dimensional subspaces. In addition, countable intersections of prevalent sets are prevalent.
The following two propositions follow immediately from Theorem 2.2 and the definitions of robust and fragile.
Proposition 2.3
If r = M, then SolSet(p) is robust for almost every , and almost every
.
Proposition 2.4
If r<M, then p is fragile for every F and every . In particular, SolSet(p) is fragile for every F and every
.
As a result, it is of key importance in structured systems like (Equation2(2)
(2) ) to know when the maximal possible rank of the Jacobian matrix is equal to M. To more formally define a structured system corresponding to a directed graph, we make the following definition.
Definition 2.5
The structure matrix of a directed graph G is a matrix where the ij entry is allowed to be nonzero if and only if G has an edge from node j to node i. The structure matrix is often called an adjacency matrix of the directed graph. A function F is said to respect a structure matrix S if
implies that
for all x. In particular, let
be the set of all linear functions Ax where A is a matrix that respects S. The maximal rank of all matrices respecting a structure matrix S is called maxrank(S). We say a vector space
of
functions that respect a structure is a structured function space, provided
includes
.
When M = N, a classical result [Citation2, Citation13] states that if the nodes can be divided into disjoint subsets, each of which can be traversed on the directed graph in a circuit with no repeated nodes, then generically the Jacobian is nonsingular. This proceeds from the fact that the determinant, as a function of the matrix entries, has a nonvanishing degree N term in this case, and so will be nonzero for a generic choice of matrix entries. This is a feature of the system (Equation2(2)
(2) ) shown in Figure (a), since there is a single circuit with no repeated nodes, for example
.
3. Bottlenecks
A more detailed analysis of the maxrank of a directed graph appears in [Citation8], where the concept of bottlenecks was developed. A bottleneck is a local property of a directed graph which exists if and only if r = M in Proposition 2.3. In other words, the solution set is robust if and only there is no bottleneck. This provides modellers (1) a tool to isolate and analyse the cause of rank deficiency in a structured system and (2) a key principle in design of robust networks.
Bottlenecks are specific properties of the graphical representation that can localize the part of the system where rank deficiency is generated. In addition, a method for locating the bottlenecks was described in [Citation8]. Bottlenecks, called ‘dilations’ in a slightly different context, were studied for structural observability and controllability by Lin [Citation9], and extended later [Citation3, Citation10–12].
In the remainder of this section, we give a brief review of bottlenecks and show how they can be located. Given a graph representing a structured system of M equations in N variables, let B be a subset of the nodes of the graph. The backward set of B, denoted by , is the set of all nodes g for which there is an edge starting at g and ending at a node in B. We say a pair of sets of nodes, B and
, is a backward k-bottleneck if B has exactly k nodes more than
.
A system that has a bottleneck will sometimes have several, but it turns out that there is a unique most concentrated bottleneck. Let be the largest k for which there is a backward k-bottleneck. Let
be a backward
-bottleneck where B has as few nodes as possible, i.e. it has the minimum number of nodes that has the maximum
. We call such a bottleneck a minimax backward bottleneck. The minimax backward bottleneck is unique if it exists.
There is no bottleneck in Figure (a), but in Figure (b), we have removed two edges, disconnecting nodes 3 and 4 from node 2. Note that if we choose , then
. Therefore the pair
is a backward 1-bottleneck. This is the minimax backward bottleneck for this graph.
The set of nodes comprising the minimax bottleneck is not always obvious from the graph. The concept of kernel nodes, described next, allows us to locate the minimax forward and backward bottlenecks.
Definition 3.1
For a matrix A, we say a vector x is a null vector or a kernel vector if Ax = 0. The kernel of A, denoted , is the set of all null vectors of A. The graph nodes of a structured system
can be divided into two distinct types:
regular nodes that take the value zero for every vector in
for almost every matrix
kernel nodes that are nonzero in some null vector of A for almost every
The set of kernel nodes is denoted by .
Lemma 4.5 of [Citation8] states that every node is either a regular node or a kernel node. The connection to the generic rank is given by the following result of [Citation8]:
Theorem 3.2
Bottleneck Theorem
Let be the
structure matrix of a directed graph G. Let
.
| (1) | r<M if and only if there is a backward K-bottleneck for K>0. If so, there exists a unique minimax backward | ||||
| (2) | The bottle of the minimax backward bottleneck of G is the set of kernel nodes | ||||
| (3) | A graph is robust if and only if there is no backward bottleneck. | ||||
As mentioned above, the system in Figure (b) has minimax backward bottleneck , which is the set of kernel nodes of the transpose
of the structure matrix, according to part (2) of the theorem. It follows that while the system in Figure (a) is robust, the system in Figure (b) with two edges deleted is fragile.
Looking at Figure in reverse shows the usefulness of finding the minimax bottleneck. If we are presented with the fragile system in Figure (b), we can see from the directed graph that there is a backward bottleneck to , with
. This shows the modeller from where the rank deficiency arises, and how to fix the deficiency, by adding an edge from node 3 or 4 to node 2. Both are added in Figure (a).
Alternatively, one can compute the bottleneck from the kernel nodes of , according to Theorem 3.2. The structure matrix S for Figure (b) and its transpose are
Computing the kernel of a matrix
in this general form yields a one-dimensional kernel spanned by a vector with nonzero entries in the 2, 3 and 4 coordinates, implying the minimax backward bottleneck is
.
A simpler version of a bottleneck, and one that motivated this line of research, stems from the Competitive Exclusion Principle (CEP) from ecology [Citation5], as shown in the following example.
Example 3.3
Consider an ecological system where the logarithmic growth rates of species 1 and 2 depend only upon species 3, (4)
(4) where
and
denote the population densities of the predators, and
is the prey. Steady states are defined by the system of equations
(5)
(5) which has directed graph shown in Figure . Note that the system has a backward 1-bottleneck
(which is the minimax backward bottleneck), and so according to Theorem 3.2, the system is fragile, meaning small changes in parameters can erase the steady state.
Figure 2. The directed graph that corresponds to the Competitive Exclusion Principle. A model of two species that depend only on a single third species has only nonrobust solutions.
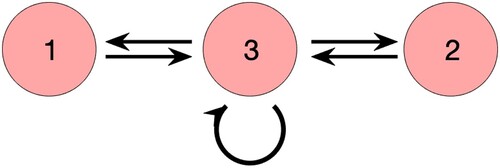
This is an illustration of the CEP, discussed in ecology since the time of Darwin, that holds that two species with the same predator and prey cannot occupy the same niche in an ecosystem. One species (the more efficient one) is bound to eventually outcompete the other and force it to extinction. This corresponds to a ‘probability one’ statement mathematically, that is at the heart of the Bottleneck Theorem. In fact, Theorem 3.2 can be viewed as the mathematical equivalent of following the Competitive Exclusion Principle to its logical conclusion.
4. Symmetric structures
In this section, we consider a more general context than the structured systems of the previous section. Instead of defining structure by completely disallowing variables in equations (by requiring some ), we allow arbitrary linear relations between entries of the Jacobian matrix, which we call symmetries.
Definition 4.1
Consider an matrix S with entries
. A symmetry of matrix entries is a linear relation
. A symmetry structure Σ is any collection of symmetries of matrix entries. Let
be a
function and denote its partial derivatives by
. We say that F respects the symmetry structure Σ if for every
, we have
for all x. In particular, let
be the vector space of all linear functions F that respect Σ. We call a vector space
of
functions that respect a structure Σ a structured function space, provided
includes
. The maximal rank of all matrices respecting a symmetry structure Σ is called maxrank
.
In other words, a symmetry structure for functions is a requirement that certain specified relations hold among the Jacobian entries. In the simplest case, we could require some partial derivatives to be identically zero. This would correspond to the structure matrix of a directed graph as in [Citation8].
For example, Figure (a) shows a directed graph that represents the relations
(6)
(6) which sets 12 of the possible 25 Jacobian entries to zero. Figure (b) shows a directed graph that represents the six relations above, and in addition,
(7)
(7) In a system with a symmetry, some Jacobian entries are assumed to be equal to one another. Figure (c) shows a directed graph that enforces the relations (Equation6
(6)
(6) ) and also
In other words, the Jacobian entries represented by the blue edges in the graph are assumed to be equal, and the Jacobian entries represented by the green edges are also assumed to be equal.
For a system of M equations in N variables, we denote the Jacobian matrix by
. If
and
are subsets corresponding to equations and variables, respectively, then by abuse of notation we denote the submatrix of the Jacobian of partial derivatives of the functions in B by the variables in C by
.
We will be concerned with certain rank deficiencies in the Jacobian matrix. Given a symmetric structure Σ and , let the backward set
denote the set of variables that are allowed by Σ to appear in the equations of B. For example, in Figure (a), if
, then
, while in Figure (b), if
, then
. If k>0, we call the pair
a k-shortfall if
where
denotes the number of elements of the set B. It is clear that if a k-shortfall exists for any set of equations B, the rank of the full Jacobian will be strictly less than M.
In fact, a symmetric structure may have more than one k-shortfall. The term minimax -shortfall is reserved for the shortfall with maximum
and as small B as possible. We show in the following theorem that the minimax shortfall is unique.
The following result is a more general form of Theorem 3.2.
Theorem 4.2
(Shortfall Theorem) Let Σ be a symmetric structure of the matrix S and set
.
| (1) | r<M if and only if there is a k-shortfall for some k>0. If so, there exists a unique minimax backward | ||||
| (2) | The bottle of the minimax shortfall is the set of kernel nodes | ||||
| (3) | A graph is robust if and only if there is no shortfall. | ||||
Proof.
(1) If there is a k-shortfall, then there is a set B (the bottle) of b nodes for which the submatrix has rank b−k, where
is the backward set of B. That implies that the rows of the Jacobian matrix assigned to the nodes of B span rank
, and so the rank of the Jacobian must be
.
Conversely, assume r<M. Let be the set of kernel nodes of T. According to Lemma 4.5 of [Citation8], for any node j in B, the set
of
matrices respecting T for which
for every
ker (T) has measure zero. Let
.
First, note that if B is the empty set, then the intersection of the is a full measure set, i.e. for almost every A respecting the structure T,
, a contradiction to r<M. Thus b>0. Note that if j is in the complement
, then
for every vector x in
, for every A not in the measure zero set
.
Consider matrices A in with symmetry structure matrix T and are not in the set Q. Renumber the nodes such that
Let
denote the submatrix of first b columns of A. Since A is not in Q,
for x in ker(A), so we can assume ker
, where U is a dimension
subspace of
where
. The space
is
dimensional. For almost every A respecting T, the rows
of the submatrix
must all be in
.
The columns of the submatrix
of S span only
dimensions. Since
corresponds to the columns of
that have nonzero entries, rank
and
is a
-shortfall. This is the unique minimax
-shortfall because the rank of S is
and all nodes in B must be included in the minimax
-shortfall.
(2) Follows immediately from the proof of (1).
(3) According to Propositions 2.3 and 2.4, robust is equivalent to rank . By (1), this is true if and only if there is no shortfall.
Example 4.3
The example in Figure (c) is an application of the Shortfall Theorem. The Jacobian matrix of the symmetric structure is
(8)
(8) where
and
. The kernel nodes of
form the set
, which is the minimax shortfall. Moreover, since
, with the same cardinality as B, the Bottleneck Theorem 3.2 is not applicable. However, it is easy to check that the submatrix
has rank equal to
, so the Shortfall Theorem 4.2 implies that the system is fragile.
The computation of the kernel nodes in a system like (Equation8(8)
(8) ) can be done in several different ways. Using a symbolic algebra system like Maple or Matlab will provide a basis for the kernel, although this approach suffers from poor scaling as the size of the matrix increases. A quicker way that works (with probability one) is to seed the matrix with random numbers in the nonzero entries, making sure to respect symmetries, and then computing the kernel using the reduced echelon form of the randomized matrix to determine the kernel nodes.
Example 4.4
Consider the coupled system of differential equations defined by (9)
(9) where
are arbitrary
functions. Figure (a) displays the directed graph corresponding to the equations. Setting the left-hand sides to zero to solve for steady states yields a structured system whose Jacobian matrix has a circuit, for example
. Therefore almost every system of this form gives robust solutions.
Figure 3. Graphical representations of structured systems and symmetric structures. (a) Robust structured system corresponding to relations (Equation9(9)
(9) ). (b) Robust system in (a) is changed to fragile symmetric system when some edges are identified, corresponding to system (Equation10
(10)
(10) ). Blue, green and red triples are matched Jacobian entries. (c) With an added edge from node 1 to node 2, robustness is restored in the symmetric structure.
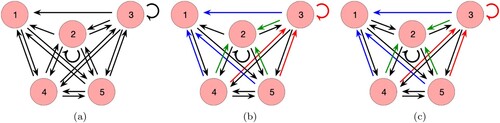
Example 4.5
Next, we add symmetries to the coupled system of (Equation9(9)
(9) ). The system is
(10)
(10) where
are arbitrary
functions. Figure (b) displays the directed graph corresponding to the equations. Setting the left-hand sides to zero yields a symmetric structure with Jacobian matrix
(11)
(11) with relations
There is no bottleneck, but there is a shortfall. In fact, the minimax 1-shortfall can be found from the Shortfall Theorem to be
, consisting of the kernel nodes. Then
, and the Jacobian submatrix
has rank 2. Therefore (Equation10
(10)
(10) ) has only fragile steady states.
To repair this shortfall, only one edge has to be added to the graph: For example, connecting suffices, as shown in Figure (c). Then B is no longer a shortfall, and in fact the computation yields no kernel nodes. Thus according to the Shortfall Theorem, almost every instantiation of the revised system (in the sense of prevalence) has robust equilibria.
5. Discussion
Model uncertainty is an important factor in natural systems such as population networks, food webs, as well as coupled systems in general (see, e.g. [Citation4] and references therein). Models that are stable with respect to small changes in their defining equations are more likely to track natural behaviour. These models produce ‘robust’ solutions that remain solutions under small perturbations of the model parameters.
In recent work, the concept of bottlenecks was proposed as a graphical mechanism to explain obstructions to robustness in coupled systems whose defining equations allow or disallow certain variables, called structured systems. In the present work, we have generalized this concept to systems that, in addition to allowing or disallowing variables, also allow equalities between coupling strengths, which we call symmetries. These symmetric structures therefore have obstructions to robustness, called shortfalls, that are more general forms of bottlenecks. In addition, we show how to find the minimax shortfall by a simple kernel computation.
Bottlenecks and shortfalls represent important organizing principles for understanding and control of structured systems. In [Citation1], special die-out Lyapunov functions are created for each bottleneck that show when species must die out. The Lyapunov functions use the kernel vectors, each kernel vector giving a different Lyapunov function.
Note that the description of steady states given here is independent of the stability of the dynamics. The persistence of steady states under small changes in parameters is a fundamental aspect of models that is sometimes underappreciated and should be considered when formulating general properties of models. These results stress the importance of robustness as a central issue in effective modelling of dynamics in nature.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- N. Akhavan and J.A. Yorke, Extinction of multiple populations and a team of die-out Lyapunov functions, SIAM J. Appl. Dyn. Syst. 22(3) (2023), pp. 2382–2407.
- L. Blackhall and D.J. Hill, On the structural controllability of networks of linear systems, IFAC Proc. Vol. 43(19) (2010), pp. 245–250.
- J.M. Dion, C. Commault, and J. Van der Woude, Generic properties and control of linear structured systems: A survey, Automatica 39(7) (2003), pp. 1125–1144.
- T. Gross, L. Rudolf, S.A. Levin, and U. Dieckmann, Generalized models reveal stabilizing factors in food webs, Science 325(5941) (2009), pp. 747–750.
- G. Hardin, The competitive exclusion principle: An idea that took a century to be born has implications in ecology, economics, and genetics, Science 131(3409) (1960), pp. 1292–1297.
- B.R. Hunt, T. Sauer, and J.A. Yorke, Prevalence: A translation-invariant almost every on infinite-dimensional spaces, Bullet. Amer. Math. Soc. 27(2) (1992), pp. 217–238.
- S. Jahedi, T. Sauer, and J.A. Yorke, Robustness of solutions of almost every system of equations, SIAM J. Appl. Math. 82(5) (2022), pp. 1791–1807.
- S. Jahedi, T. Sauer, and J.A. Yorke, Structured systems of nonlinear equations, SIAM J. Appl. Math.83(4) (2023), pp. 1696–1716.
- C.T. Lin, Structural controllability, IEEE Trans. Automat. Contr. 19(3) (1974), pp. 201–208.
- F. Liu and A.S. Morse, A graphical characterization of structurally controllable linear systems with dependent parameters, IEEE Trans. Automat. Contr. 64(11) (2019), pp. 4484–4495.
- Y.Y. Liu, J.J. Slotine, and A.L. Barabási, Controllability of complex networks, Nature 473(7346) (2011), pp. 167–173.
- Y.Y. Liu, J.J. Slotine, and A.L. Barabási, Observability of complex systems, Proc. Natl. Acad. Sci 110(7) (2013), pp. 2460–2465.
- R. Shields and J. Pearson, Structural controllability of multiinput linear systems, IEEE Trans. Automat. Contr. 21(2) (1976), pp. 203–212.