
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
Betweenness is a universal notion present in several disciplines of mathematics. The notion of betweenness has a profound history and many pioneers like Euclid, Pasch, Hilbert have studied betweenness axiomatically. In discrete mathematics too, betweenness is present and several authors have worked on this concept from an axiomatic view. In graph theory, betweenness is developed mainly as metric betweenness, studied using the shortest path metric in a connected graph, thus resulting in the notion of the interval function. Many interesting results are available in graph theory using the interval function. The interval function is generalized to induced path function by replacing shortest paths by induced paths. The induced path betweenness also captured attention among graph theorists with several interesting results to date. From an axiomatic point of view, two pertinent questions can be framed on these functions. Is it possible to axiomatically characterize the interval function of some special graphs using some set of first order axioms defined on an arbitrary transit function? Is it possible to characterize the graphs with the help of their interval functions? In this paper, we survey the results as answers to these questions available from the research papers.
1 Introduction
The experience of “Betweenness” is natural in our everyday life. Betweenness is an ontological entity, only when there are two points either in space or time. This is true in one’s own life and in one’s relationship with others. In this sense, betweenness is a universal concept, but at the same time knowledge about it warrants historical ontology.
In Mathematics too, betweenness is a natural concept which is present in several branches like Geometry, Algebra, Poset Theory, Metric Geometry, Graph Theory and in many other structures. For example, in Geometry a point is between two other points, say
and
, if
lies in a line segment between
and
;
in a poset
;
, in a metric space
. Betweenness can be studied axiomatically by defining independent axioms on a non-empty set.
Betweenness as a concept was first formulated in Geometry. This concept has genealogical antecedence from the geometry of Euclid. However, early th century mathematicians recognized that Euclid’s system of axioms was incomplete. Concepts such as “between”, “inside” and “outside” were not precise. Nevertheless pictures were used for reasoning by Euclid. In 1882, Moritz Pasch, one of the pioneering geometer, carefully examined these missing unstated assumptions and played a crucial role in the development of the axiomatic method in Geometry. The explicit axiomatization of the notion of betweenness was first carried out by Pasch in [Citation1]. Also refer [Citation2,Citation3]. This has provided a solid foundation (in the spirit of synthetic geometry) for bounded convex domains inside the projective spaces. The deductivist nature of Pasch’s geometry opened a new era in the axiomatic foundation of geometry.
The notion of betweenness does not appear intrinsically in the book by Pasch as he speaks of a point belonging to segment
.
Pasch in the same book axiomatized a closed line quaternary relation of separation with
is termed as the point-pair
separates the point-pair
. Pasch axiom of order, establishes a betweenness relation for points on a line as well as the property that a line intersecting one side of the triangle must necessarily intersect another side. Instead of the undefined primitive terms, like the point, line, and plane by Euclid, Pasch introduced the point, the line segment and the planar-segment as the basic notions, in terms of which the line and the plane are defined. Followed by Pasch, Peano gradually refined the axioms of betweenness in geometry [Citation4].
David Hilbert developed the modern system of axioms, which removed these limitations, in his book “Grundlagen der Geometrie” (Foundations of Geometry); which was first published in the year 1899, see [Citation5]. The undefined terms (according to Hilbert) are points, lines, planes, “to be on”, “to be between” and “to be congruent”. The axioms of geometry, which implicitly describe the undefined terms, are grouped into five of which the second set of axioms are the axioms of betweenness. What is being axiomatized in this group of axioms is the relation which, intuitively speaking, says whether a point is between two other points or not. Intuitively, we may think of
as the point
is between points
and
.
Marlow Sholander developed a theory of betweenness using ternary relations to study lattices, trees and semi-lattices; in particular, he introduced what is a median semi-lattice using his theory of betweenness. He published two papers. In his first paper titled “Trees, lattices, order and betweenness” see [Citation6], he investigates betweenness for various kinds of orderings. This paper considers postulates expressed in terms of “segments”, “medians”, and “betweenness”; and characterizations are obtained for trees, lattices, and partially ordered sets. In the second paper, it is shown that lattices and trees have a common generalization, which he calls ‘median semi lattice’, see [Citation7].
Dan A. Simovici in his paper “Betweenness, Metrics and Entropies in Lattices” [Citation8] investigates a class of metrics on lattices that are compatible with the partial order defined by the lattice, using the ternary relation of betweenness that can be naturally defined on a metric space. The relationships between entropy-like functions and metrics defined on lattices are studied and the links between various properties of entropies and metrics are shown.
The survey paper by Ivo Düntsch and Alasdair Urquhart outlines the history of axiomatizations of betweenness relations and demonstrates that the class of betweenness relations generated by a reflexive and antisymmetric binary relation is first order axiomatizable, albeit with an infinite number of variables, see [Citation9]. The paper points out the connection of betweenness relations with comparability graphs. Such a graph may be generated by essentially different partial orders; in contrast, betweenness relations carry, in some sense, total information: If is generated by a reflexive and antisymmetric binary relation, then this relation is determined by converse relations of the components.
Prenowitz and Jantosciak [Citation10] introduced the concept of Join Space which is an abstract model for partially ordered sets, linear, spherical and projective geometries. A Join Space is a set with join operation
satisfying the following join axioms:
(J1) (Closedness)
(J2) (Commutative law)
(J3) (Associative Law)
(J4) implies
, (where
, extension operator) (Pasch Axiom)
In the Join Space, betweenness is defined as is between
and
if
. This paper has two examples of vector spaces, which are special Join Spaces, and vector spaces over an ordered field. The paper relates join spaces with ternary algebras.
Following others, Hedlíková represented the betweenness relation as a ternary relation and introduced the idea of ternary spaces. In the paper “Ternary Spaces, Media and Chebyshev Sets”, [Citation11,Citation12] she discusses ternary spaces. In a ternary space, a ternary relation defines a betweenness which unifies the metric, order and lattice betweenness in a vector space over a partially ordered field; and also extends betweenness to other geometric structures. This paper improves upon the existing theory of betweenness as an abstract algebraic concept. The paper also defines new concepts such as “media” and “Chebyshev sets” (ternary algebras satisfying certain special axioms of betweenness) and discusses their properties. A similar notion of betweenness can be found in [Citation13].
Many authors followed this approach to define theories on the algebraic betweenness of ternary algebras. For example, the characterization of weakly-median graphs considered as algebras can be found in Chepoi et al. [Citation14,Citation15].
2 Betweenness in graphs
The theory of metric betweenness in graphs is developed along with the study of betweenness in general metric spaces. The most important and well-studied metric in graphs is the “shortest path metric” (geodesic metric) on a connected graph. The geodesic betweenness gives way to look at the set of all “metrically between” vertices defined between two vertices, thus resulting in the notion of “interval” or geodesic interval in a graph. The first systematic study of the notion of the intervals in graphs was attempted by Mulder in 1980 [Citation16]. Many significant properties of the interval on the real line can be found in the interval function
of a graph. For example, if
is a vertex, between
and
, then
is the only vertex between
and
and
and
. This property implies the following,
: if
is a vertex, between
and
, different from
, then
is not between
and
.
: if
is a vertex between
and
and
is between
and
, then
is between
and
. Similarly
: if
is between
and
, and
is between
and
, then
is between
and
. These properties are described as a proposition in [Citation16]. Mulder in his book [Citation16] has used the concept of interval function
to study several classes of graphs, some of them are related to algebraic structures, and some are related to other discrete mathematical structures. Several authors followed Mulder and studied the interval function
. The notable among them were Nieminen [Citation17] who considered
from the point of view of a join space. A connected graph is a join space with
if and only if it is a strong prime convex intersection graph.
Nebesḱy attempted to characterize the interval function by taking the five betweenness properties of
as classical axioms, which we mentioned above as proposition stated by Mulder in [Citation16]. Nebesḱy proposed additional axioms and presented the characterization of
in a series of papers starting from 1994, each time improving the proof, [18–21Citation[18]Citation[19]Citation[20]Citation[21]]. Also refer [Citation22,Citation23]. In [Citation24], Mulder and Nebesḱy characterized
by finding the minimal set of axioms required for the characterization of
besides the five classical betweenness axioms.
The interval function is basically defined using the graph metric generated by the geodesics in graphs. In the literature, these intervals are also called geodesic intervals.
3 Betweenness through transit functions
The studies on the interval function of a connected graph using geodesics motivated the analogous study using other types of paths, the prominent among them was the induced paths instead of geodesics. Induced paths are paths without having any edges between non-consecutive vertices of the paths. One can also study the coarsest path intervals consisting of every path, known as the All paths interval. Generalizing these notions in graphs, Mulder in [Citation25] introduced Transit functions on discrete structures with the aim to axiomatize the concept of betweenness. Following Mulder, betweenness has been extensively studied on connected simple graphs with the three basic transit functions, namely the interval function, induced path function and all-paths function as models. Our concern in this paper is to give a brief survey on these three standard path functions on finite connected simple graphs and to look at the study of betweenness as a tool for studying graph families. A transit function is an abstract notion of an interval. A transit function defined on a nonempty set
is a function
satisfying the three (transit) axioms
| (t1) |
| ||||
| (t2) |
| ||||
| (t3) |
| ||||
The underlying graph of a transit function
is the graph with vertex set
, where two distinct vertices
and
are joined by an edge if and only if
. Basically, a transit function on a simple connected undirected graph
describes how we can get from vertex
to vertex
: via vertices in
. An element
, can be considered as “between” the points
and
and hence the set
consisting of the set of all elements between
and
abstracts the notion of an interval on set
.
The interval function of a connected graph is defined as
The induced paths naturally generalizes the shortest path in the sense that every shortest path is an induced path and replacing shortest paths by induced paths in the previous definition, we obtain the induced path transit function, which is defined as Replacing shortest paths or induced paths by any path in the graph, we obtain the all-paths transit function of
, defined as
For a transit function
on a non-empty set
, the following betweenness axioms are natural.
| (b1) | |||||
| (b2) |
| ||||
| (b3) | If | ||||
| (b4) | If | ||||
| (m) | If | ||||
Mulder in [Citation25], termed the axioms (b1) and (b2) as betweenness and the axiom (m) is known as monotone axiom. By we mean
. Also if
is a vertex set of some graph then we say
is a transit function defined on the graph
.
4 The interval function of arbitrary graphs
An interesting problem initiated by Nebeský and finally settled by Mulder and Nebeský for the interval function of a connected graph is the following. Given some function , what properties should
have to make it the interval function of some connected graph with vertex set V. Mulder in [Citation16] described some simple properties of the interval function
without any reference to the graph. The proposition is stated below.
Proposition 1
[Citation16]
| (t1) | = |
|
| (t2) | = |
|
| (b2) | = | if |
| (b3) | = | if |
| (b4) | = | if |
From Proposition 1, it is obvious that the interval function of any connected graph satisfies the axiom (t1), (t2), (b2), (b3) and (b4). Hence these axioms were termed as five classical axioms for interval function.
In 1994 Nebeskỳ, in [Citation26], presented first such an axiomatic characterization of the interval function of a connected graph by considering the five classical axioms defined on a function from
of a connected graph
. To characterize
Nebeskỳ used the following two additional axioms.
| VII. | If | ||||
| VIII. | If | ||||
Nebeskỳ proved the following theorem.
Theorem 1
[Citation26]
Let be a function defined on the vertex set
of a connected graph
. Then
if and only if
satisfies the axioms VII and VIII.
In 2001 Nebeskỳ improved the characterization of the interval function of a connected graph in [Citation20], in which he defined the notion of a geometric function. A geometric function
on
is a function satisfying (t1), (t2), (b2) and (b3). The axioms (b2) and (b3) can be combined to a simple axiom as:
| (ge) | if | ||||
Nebeskỳ’s second characterization of the interval function uses the following three axioms [Citation20].
| (X) | If | ||||
| (Y) | If | ||||
| (Z) | if | ||||
The main theorem in [Citation20] is stated as:
Theorem 2
[Citation20]
Let be a geometric function associated with a connected graph
. Then
is the interval function of
if and only if
satisfies the axioms (X), (Y), and (Z).
In 2009, Mulder and Nebeskỳ [Citation27], in search of an optimal characterization of the interval function in the sense of a minimal set of axioms required to characterize the interval function observed that a function must satisfy the five classical axioms if it were the interval function
. They searched for minimal set of additional axioms required to characterize the interval function. The additional axioms were termed as
and
and are defined as
| (s1) | If | ||||
| (s2) | If | ||||
The theorem characterizing the interval function is stated as:
Theorem 3
[Citation27]
Let be a function on
satisfying five classical axioms with underlying graph
and let
be the interval function of
. The following statements are equivalent:
(a) ,
(b) satisfies axioms
and
.
The characterization of the interval function of a connected graph
due to Mulder and Nebeský is generalized to arbitrary graphs including disconnected graphs recently by Changat et al. in [Citation28]. The interval function
can be naturally extended in a disconnected graph
by defining
lies in some shortest
-path , if
and
belong to the same component of
(a
of
is a maximal connected subgraph of
), and
, if
belong to different components of
. In this characterization, axiom
is adapted to a weaker axiom
and
is modified to
, further a new axiom, namely
is introduced for components. The new sets of axioms are the following.
| (t1∗) | If | ||||
| (t3∗) |
| ||||
| (Compt) | If | ||||
The theorem is stated as follows.
Theorem 4
[Citation28]
Let be a function on the nonempty set
. Then
satisfies the axioms
,
,
,
,
,
,
,
and
if and only if
is the interval function of
.
5 Interval function of special graph families
One can easily observe that the axioms that are introduced so far are first-order axioms (that is axioms which can be framed in the language of first-order logic). Thus the first order axiomatization of the interval function of an arbitrary connected graph due to Nebeskỳ and finally by Mulder and Nebeskỳ naturally pose the following questions.
Is it possible to axiomatically characterize the interval function of some special graphs using some set of first-order axioms defined on an arbitrary transit function? Is it possible to characterize the graphs with the help of their interval functions?
In this paper, we survey the results as answers to these questions and here onwards by axiom, we mean first order axioms.
Formally the two questions can be framed as follows.
| • | (Problem 1): Introduce a particular betweenness axiom | ||||
| • | (Problem 2): Characterize the interval function of a particular graph | ||||
To answer (Problem 2), introduce a set of betweenness axioms for a transit function
on a non-empty set
, so that the interval function
is isomorphic to
satisfying the axioms in
and
isomorphic to
.
A bipartite graph is a graph whose vertex set can be partitioned into two sets
and
so that each edge in the graph has one end in
and the other end in
.
A graph is said to be a median graph if for all
,
, where
is the interval function of the graph. Graphs which satisfy
are known as modular graphs. It can be easily seen that modular graphs are bipartite. By an interval structure, we mean a transit function which satisfies the axiom (m) and
. A connected graph
is called as interval monotone if the interval function
satisfies the monotone axiom
.
As the first instance of the graph for problems and
, we consider median graphs, and the corresponding results due to Mulder in [Citation16] is stated as follows.
Theorem 5
[Citation16]
Let be a connected graph with interval function
. Then
is a median graph if and only if
is interval monotone and
satisfies the condition that if
, then
.
Moreover Mulder proved.
Theorem 6
[Citation16]
A connected graph is a median graph if and only there exists a median interval structure
on
such that
isomorphic to
and the interval function
is isomorphic to
.
We describe the status of the interval function on one of the classical axiom from geometry, namely the Pasch Axiom. The Pasch axiom is defined for an arbitrary transit function as follows.
Pasch Axiom: For all and
, the intervals
and
have nonempty intersection. The Pasch axiom is a strong axiom and implies the axiom
, for an arbitrary transit function. The class of connected graphs for which the interval function satisfies the Pasch axiom form an interesting class of graphs, generalizing the median graphs. This is observed by Chepoi in [Citation29], where he proved equivalent assertions of Pasch Axiom for an arbitrary transit function and as a special case for the interval function of a connected graph. For this, we need the following definitions. A convexity on a non-empty finite set
consists of
together with a collection
of subsets of
, called convex sets such that: (a) the empty set and the set X are convex and (b) the intersection of convex sets is convex. For a convexity
, a convex subset of
whose complement (as set complement) is also convex is called a half space. Two disjoint subsets
in
are separated by a half space
provided
and
.
is said to fulfill the separation axiom
if any pair of disjoint convex sets in
can be separated by a half space. It can be observed that every transit function
on a non-empty set
has an associated convexity, namely
-convexity, where, a subset
of
is
-convex, provided
, for every
. The convexity associated with the interval function of a connected graph is known as the geodesic convexity. The following theorem characterizes the interval function of a connected graph satisfying the Pasch axiom.
Theorem 7
[Citation29]
The interval function of a connected graph
satisfies the Pasch Axiom if and only if the corresponding geodesic convexity of
is
.
A subgraph of the graph
is an isometric subgraph of
if the distance
between any two points
and
in
equals their distance
in the larger graph
. A graph
can be embedded isometrically into a graph
if
may be represented as an isometric subgraph of
. For
, the
-dimensional hypercube is the graph on vertices representing all 0, 1-tuples of length
, where two vertices are adjacent whenever the tuples differ in exactly one position. A graph
is weakly modular if its shortest-path metric
satisfies the following two conditions namely, the Triangle Condition (TC) and the Quadrangle Condition (QC):
| (TC) | = | for any three vertices |
| (QC) | = | for any four vertices |
Weakly median graphs are weakly modular graphs in which the vertex in the triangle and quadrangle conditions is unique. Weakly median graphs form an interesting class of non-bipartite generalizations of median graphs. In [Citation29], Chepoi also identified the connected graphs (bipartite and non-bipartite graphs separately) whose interval function satisfies the Pasch axiom. Among non-bipartite graphs, the class of graphs whose interval function satisfies the Pasch axiom are precisely the weakly median graphs.
The graphs which are isometrically embeddable into hypercubes are known as partial cubes. Median graphs form an important class of partial cubes.
Chepoi in [Citation29], proved that among bipartite graphs, the class of graphs whose interval function satisfies Pasch axiom are a subclass of partial cubes.
To describe the Partial cubes whose interval function satisfies Pasch axiom, Chepoi et al., introduced the following terms and definitions [Citation30].
A connected graph is a partial cube if and only if
is bipartite and for any edge
, the sets
and
are convex [Citation31]. In this case,
, whence
and
are half spaces. It is also known that any convex subgraph
of a partial cube can be represented as the intersection of half spaces of
[32–34Citation[32]Citation[33]Citation[34]]. A contraction of
is the partial cube
obtained from
by contracting all edges corresponding to a given coordinate in a hypercube embedding. Now, a partial cube
is called a partial cube-minor (pc-minor) of
if
can be obtained by a sequence of contractions from a convex subgraph of
. If
are finite partial cubes, then
is the set of all partial cubes
such that no
, can be obtained as a pc-minor of
.
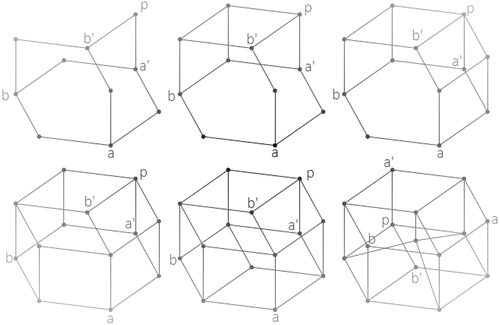
It is proved that partial cubes whose interval function satisfies Pasch axiom are precisely where
’s are isometric subgraphs of
depicted in [Citation34,Citation35,Citation29,Citation30].
The following axioms are considered by Changat et al. in [Citation36].
| (J0) | For any pairwise distinct elements | ||||
| (J1) |
| ||||
| (J2) |
| ||||
| (J3) |
| ||||
| (J2’) |
| ||||
| (J3’) |
| ||||
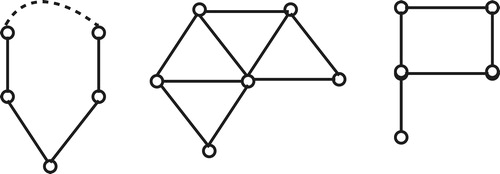
We need the following graphs in the sequel. By a long cycle (Hole) we mean a cycle of length at least 5 (see and ).
A chordal graph is a graph with no induced cycles of length more than . We say that a graph
is free from a graph
if
does not contain
as an induced subgraph. Let
be a family of graphs
. We say
is
-free if
has no induced subgraph isomorphic to
for
. Changat et al. in [Citation37] proved the following two theorems.
Theorem 8
[Citation37]
Let be a connected graph with the interval function
satisfy the axiom (J3) if and only if the graph
is free from House, Hole, the
-graph, and
-fan.
Theorem 9
[Citation37]
on a connected graph
satisfies the axiom (J0) if and only if
is a chordal graph that is
-fan free.
Sholander in 1952 in [Citation38] gave a characterization of the interval function of a tree without a complete proof. The completion of the proof was presented by Chvàtal et al. in [Citation39]. Sholander’s axioms were the following.
| (S) | There exists an | ||||
| (T) |
| ||||
| (U) |
| ||||
Sholander [Citation38] proved that his axioms (S) and (T) imply the five classical axioms and also stated that a function defined on the vertex set
of a connected graph
satisfies the axioms (S), (T) and (U) if and only if
is a tree and
coincides with the interval function (Sholander used the term segment function for the interval function, a formal proof of this theorem is due to Chvàtal et al. in [Citation39]).
A block graph is a graph in which each block is complete. In [Citation40], Balakrishnan et al. extended the characterization of the interval function of trees to block graphs, a natural generalization of trees. For this, the axiom (U) is modified to (U*) defined as : , for all
. The following theorem is proved.
Theorem 10
[Citation40]
Let be a function on
. Then
satisfies axioms (t1), (t2), (b1), (b2) and (U*) if and only if
is a block graph and
.
For graphs which are complete or a tree, the following theorem is proved.
Theorem 11
[Citation40]
Let be a function on
. Then
satisfies axioms (t1), (t2), (b1), (b2) and (U’) if and only if
is a tree or a complete graph and
, where (U’) is a modification of (U) defined as
, for all
in
.
The authors also presented new characterizations of the interval function of a tree using weaker axioms than that of Sholander [Citation38] and Chvàtal et al. [Citation39].
Theorem 12
[Citation40]
Let be a function on
. Then
satisfies axioms (t1), (t2), (b1), (b2) and (U) if and only if
is a tree and
.
The following proposition and theorem have been also proved.
Proposition 2
[Citation40]
Let be a function on
. Then
satisfies axioms (t1), (t2), (b1), (b2) and (U). Then each component of
is a tree, and
on each component
of
.
Theorem 13
[Citation40]
Let be a function on
. Then
is connected and
satisfies axioms (t1), (t2) and (U) if and only if
is a tree and
.
A complete bipartite graph is a bipartite graph in which every pair of vertices in the partite classes are adjacent. In [Citation41] Changat et al. gave a characterization of interval function of a bipartite graph. For that, they introduced the following axiom.
| (bp) | for any | ||||
They have proved the following theorem.
Theorem 14
[Citation41]
Let be a transit function on a finite set
and
be the underlying graph of
, then
satisfies axioms
,
and
if and only if
is a bipartite graph and
.
With the help of another axiom , they derived a characterization of the interval function of complete bipartite graphs.
| (cbp) | For distinct | ||||
Theorem 15
[Citation41]
Let be a transit function, then
satisfies axioms
and
if and only if
is a complete bipartite graph and
.
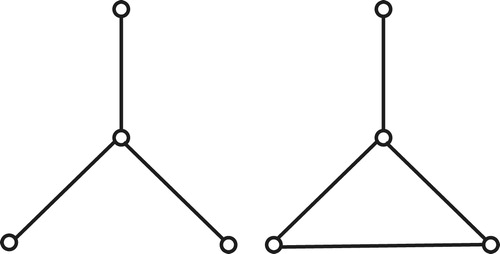
In [Citation42] Changat et al. introduced the following axioms and characterized the claw–paw-free graphs.
| (cp) | for any pairwise distinct vertices | ||||
| (d2) |
| ||||
The following theorems are proved in [Citation42].
Theorem 16
[Citation42]
The interval function of a connected graph
, satisfies axiom
if and only if
is a claw and paw-free graph.
Theorem 17
[Citation42]
A transit function on a finite nonempty set
satisfies axioms
,
,
,
and
if and only if
is claw and paw-free and
.
A graph is a Hamiltonian graph if it contains a spanning cycle — a cycle that contains all its vertices.
Theorem 18
[Citation42]
A transit function on a nonempty set
,
, satisfies axioms
,
,
,
,
and
if and only if
is claw and paw-free and Hamiltonian and
.
Nebeský introduced the following two axioms
| = | if | |
| = | if |
The following theorem characterizes the interval function of geodetic graphs, which is due to Nebeský.
Theorem 19
[Citation21]
Let be a function on
. Then
satisfies axioms
,
,
,
and
if and only if
is geodetic and
.
6 Induced path transit function of special graph families
Nebeský in [Citation43], has established that an axiomatic characterization of the induced path transit function of an arbitrary connected graph using first-order betweenness axioms like that of the interval function is impossible. As a consequence of this seminal result, the problems that we can pose for the induced path transit functions are:
| • | (Problem 3): Introduce a particular betweenness axiom | ||||
| • | (Problem 4): Characterize the induced path transit function of a particular graph | ||||
Mulder et al. in [Citation44], proved the following theorems.
Theorem 20
[Citation44]
The induced path transit function of a connected graph
satisfies axioms (b1) and (b2) if and only if
does not contain the long cycle, the house or the domino as an induced subgraph.
Theorem 21
[Citation44]
Let be a connected graph.
for any distinct
if and only if
is a complete graph.
Theorem 22
[Citation44]
Let be a connected graph.
for any triple of vertices
, if and only if every block in
is a
or a
-cycle.
Theorem 23
[Citation44]
The induced path transit function of a connected graph
satisfies (b3) axiom if and only
satisfies axioms (b1), (b2) and
is
-fan free, that is
is
-fan free.
In [Citation45], a family of graphs is constructed by Changat et al. from the complete bipartite graph
as follows: Let
and
be the degree three vertices of
. Let
and
be its degree two vertices. Subdivide the path
and make
adjacent with some internal vertices of
so that the neighbors of
and
on
on the subdivided graph are adjacent to
. Changat et al. proved the following theorem.
Theorem 24
[Citation45]
If is a connected graph which is
- and
-free. Then the induced path transit function
of
satisfies (b2) if and only if it is monotone.
Changat et al. proved the following results in [Citation36], for the induced path transit function.
Theorem 25
[Citation36]
The induced path transit function of a connected graph satisfies the axiom (J1) if and only if the graph
is
-free.
Theorem 26
[Citation36]
is a transit function on a non-empty finite set
satisfying the axioms
and
with underlying graph
. Then
is
-free.
Theorem 27
[Citation36]
if is a transit function on a non-empty finite set
satisfying the axioms (b1), (J2), (J2’) and (J3’) with underlying graph
. Then
is
-free.
Theorem 28
[Citation36]
Let be a finite non-empty set and
be a transit function on
satisfying the axioms (b1), (b2), (J1), (J2) and (J3). Let
be the underlying graph of the transit function
. Then
is precisely the induced path function of
.
Theorem 29
[Citation36]
Let be a finite non-empty set and
be a transit function on
satisfying the axioms (b1), (b2), (J1), (J2), (J2’), (J3’). Let
be the underlying graph of the transit function
. Then
is precisely the induced path function of
.
Theorem 30
[Citation36]
Let be a connected
-free graph, and let
be the induced path function of
. Then
satisfies the axioms (b1), (b2), (J1), (J2) and (J3).
Theorem 31
[Citation36]
Let be a connected
-free graph, and let
be the induced path function of
. Then
satisfies the axioms (b1), (b2), (J1), (J2), (J2’), and (J3’).
A wheel is a graph formed by connecting a single vertex to all vertices of an
-cycle
. The edges adjacent with the single vertices are known as spokes.
is the graph obtained from
by deleting a spoke.
Theorem 32
[Citation36]
Let be a connected graph that is
-free,
-free, and
-free, and let
be the induced path function of
. Then
satisfies (b1), (m), (J1), (J2), and (J3).
Theorem 33
[Citation36]
Let be a connected graph that is
-free,
-free,
-free, and let
be the induced path function
. Then
satisfies (b1), (m), (J1), (J2), (J2’) and (J3’).
Changat et al. also proved the following theorems.
Theorem 34
[Citation37]
satisfies (b4) on a connected graph
if and only if
is
and
-fan free.
Theorem 35
[Citation37]
satisfies the axiom (J0) on a connected graph
if and only if
is a chordal graph.
Changat et al. also proved the following results.
Theorem 36
[Citation41]
The induced path transit function of a connected graph
satisfies axiom
if and only if
is triangle-free.
Theorem 37
[Citation41]
Let be a transit function on a nonempty finite set
then
is either
or tree if and only if
satisfies axioms
,
,
and
and
.
A similar result for the induced path transit function as that of the interval function with respect to the axiom is proved in [Citation42].
Theorem 38
[Citation42]
The induced path transit function of a connected graph
, satisfies axiom
if and only if
is a claw and paw-free graph.
In [Citation46], Changat et al. characterized the class of graphs for which induced path transit functions satisfy Pasch axiom.
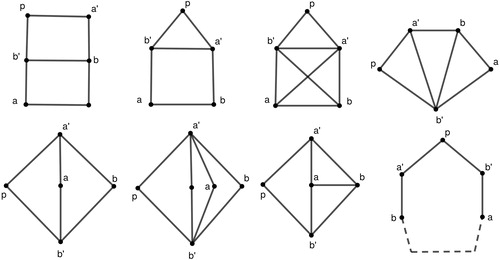
Let denote the following family of graphs: cycles
for
, domino, house, x-house, 3-fan,
,
, and
. All graphs of family
are depicted in . By
-free graphs we mean all graphs which have no subgraph isomorphic to a graph from the family
as an induced subgraph. The following theorem characterizes the induced path transit function of a connected graph satisfying the Pasch axiom.
Theorem 39
[Citation46]
For a connected graph the following statements are equivalent:
| (i) | the induced path transit function | ||||
| (ii) |
| ||||
| (iii) | for every block | ||||
Also, we have the theorem characterizing an arbitrary transit function satisfying the Pasch axiom such that the induced path transit function of its underlying graph coincides with
.
Theorem 40
[Citation46]
A graph is a connected
-free graph if and only if there exists a transit function
satisfying the Pasch axiom and axioms
,
,
and
, such that
is the underlying graph of
.
7 The all paths transit function
Recall that the All paths function is the coarsest path transit function. Changat et al. in [Citation47], characterized the all paths transit function of a graph with the axioms (b2), (U) and
| (A6) | = |
|
Let be a transit function defined on a set V. We define the transit graph
of
as follows. It has
as the vertex set and
is an edge of
if there is no
such that
.
Theorem 41
[Citation47]
Let be a transit function on a set V satisfying (b2), (U) and (A6), and let
be the transit graph of
. Then
is the all-paths transit function of
.
8 Concluding remarks
In this short survey, we have mainly discussed the interval function and the induced path transit function of graphs, representing the shortest path and the induced betweenness respectively as solutions to Problems and
. We have surveyed almost all the known results from the literature. One can consider new sets of first-order axioms and attempt problems
and
, providing more results on the shortest and the induced path betweenness, respectively. It will be interesting to give the axiomatic characterization of the interval and induced path transit functions of some standard graph families. In particular chordal graphs and its subfamilies like interval graphs, unit interval graphs may be attempted. Now we have the axiomatic characterization of interval function of partial cubes excluding those partial cubes with the pc minors depicted in . It will be interesting to attempt the axiomatic characterization of interval function of all partial cubes.
Notes
This work was supported by NBHM DAE under file NBHM/2/48(9)/2014/NBHM (R.P.)/R&D-II/4364.
Peer review under responsibility of Kalasalingam University.
References
- Moritz Pasch Vorlesungen über Neuere Geometrie 1882 Teubner Leipzig
- Pambuccian Victor Axiomatizations of hyperbolic and absolute geometries Non-Euclidean Geom. 2006 119 153
- Pambuccian Victor The axiomatics of ordered geometry: I. Ordered incidence spaces Expo. Math. 29 1 Special Issue: Special Issue: International Conference on Discrete Mathematics 2011 24 66
- Giuseppe Peano, I principii di geometria logicamente esposti, Fratelli Bocca, 1889.
- Hilbert David Grundlagen der Geometrie, Vol. 7 1913 BG Teubner
- Sholander Marlow Trees, lattices, order, and betweenness Proc. Amer. Math. Soc. 3 3 1952 369 381
- Sholander Marlow Medians, lattices, and trees Proc. Amer. Math. Soc. 5 5 1954 808 812
- Simovici Dan A. Betweenness, metrics and entropies in lattices 38th International Symposium on Multiple Valued Logic, 2008 ISMVL 2008 (2008) IEEE. 26–31.
- Duntsch Ivo Urquhart Alasdair Betweenness and comparability obtained from binary relations Lecture Notes in Comput. Sci. 4136 2006 148 161
- Prenowitz Walter Jantosciak James Geometries and join spaces J. Reine Angew. Math. 257 1972 100 128
- Hedlíková Jarmila Ternary spaces, media, and Chebyshev sets Czechoslovak Math. J. 33 3 1983 373 389
- Hedlíková Jarmila Katriňák Tibor Lattice betweenness relation and a generalization of König’s lemma Math. Slovaca 46 4 1996 343 354
- E. Sampathkumar, B-systems, in: Graph Theory and its Applications, Proceedings of the National Workshop, Manonmaniam Sundaranar University, Tirunelbeli, 1996, pp. 173–185.
- Bandelt Hans-Jürgen Chepoi Victor The algebra of metric betweenness I: Subdirect representation and retraction European J. Combin. 28 6 2007 1640 1661
- Bandelt Hans-Jürgen Chepoi Victor The algebra of metric betweenness II: Geometry and equational characterization of weakly median graphs European J. Combin. 29 3 2008 676 700
- Mulder Henry Martyn The interval function of a graph MC Tracts 132 1980 1 191
- Nieminen Juhani Join space graphs J. Geom. 33 1 Special Issue: Special Issue: International Conference on Discrete Mathematics 1988 99 103
- Nebeskỳ Ladislav A characterization of the interval function of a connected graph Czechoslovak Math. J. 44 1 Special Issue: Special Issue: International Conference on Discrete Mathematics 1994 173 178
- Nebeskỳ Ladislav A characterization of the set of all shortest paths in a connected graph Math. Bohem. 119 1 Special Issue: Special Issue: International Conference on Discrete Mathematics 1994 15 20
- Nebesky Ladislav A characterization of the interval function of a (finite or infinite) connected graph Czechoslovak Math. J. 51 3 2001 635 642
- Nebeskỳ Ladislav The interval function of a connected graph and a characterization of geodetic graphs Math. Bohem. 126 1 Special Issue: Special Issue: International Conference on Discrete Mathematics 2001 247 254
- Nebeskỳ Ladislav Intervals and steps in a connected graph Discrete Math. 286 1 Special Issue: Special Issue: International Conference on Discrete Mathematics 2004 151 156
- Nebeskỳ Ladislav The interval function of a connected graph and road systems Discrete Math. 307 16 2007 2067 2073
- Mulder Henry Martyn Nebeskỳ Ladislav Axiomatic characterization of the interval function of a graph European J. Combin. 30 5 2009 1172 1185
- Mulder Henry Martyn Transit Functions on Graphs (and Posets) Lecture Notes Series (2008) 117.
- Nebeskỳ Ladislav A characterization of the interval function of a connected graph Czechoslovak Math. J. 44 1 Special Issue: Special Issue: International Conference on Discrete Mathematics 1994 173 178
- Mulder Henry Martyn Nebeskỳ Ladislav Axiomatic characterization of the interval function of a graph European J. Combin. 30 5 2009 1172 1185
- Changat Manoj Nezhad Ferdoos Hossein Mulder Henry Martyn Narayanan N. A note on the interval function of a disconnected graph Discuss. Math. Graph Theory 2017
- Chepoi Victor Separation of two convex sets in convexity structures J. Geom. 50 1 Special Issue: Special Issue: International Conference on Discrete Mathematics 1994 30 51
- Victor Chepoi, Kolja Knauer, Tilen Marc, Partial cubes without Q3− minors, 2016. arXiv preprint http://arxiv:1606.02154.
- Djoković D.Ž. Distance-preserving subgraphs of hypercubes J. Combin. Theory Ser. B 14 3 1973 263 267
- Albenque Marie Knauer Kolja Convexity in partial cubes: the hull number Discrete Math. 339 2 2016 866 876
- Bandelt Hans-Jürgen Graphs with intrinsic S3 convexities J. Graph Theory 13 2 1989 215 228
- Chepoi V.D. d-Convex Sets in Graphs (Ph.D. thesis, Ph.D. dissertation) 1986 Moldova State University Kishinev (Russian)
- Chepoi Victor Classifying graphs by metric triangles Metody Diskret. Anal. 49 1989 75 93 (Russian)
- Changat Manoj Mathew Joseph Mulder Henry Martyn The induced path function, monotonicity and betweenness Discrete Appl. Math. 158 5 2010 426 433
- Changat Manoj Lakshmikuttyamma Anandavally K. Mathews Joseph Peterin Iztok Narasimha-Shenoi Prasanth G. Seethakuttyamma Geetha Špacapan Simon A forbidden subgraph characterization of some graph classes using betweenness axioms Discrete Math. 313 8 2013 951 958
- Sholander Marlow Trees, lattices, order, and betweenness Proc. Amer. Math. Soc. 3 3 1952 369 381
- Chvátal Vašek Rautenbach Dieter Schäfer Philipp Matthias Finite Sholander trees, trees, and their betweenness Discrete Math. 311 20 2011 2143 2147
- Balakrishnan Kannan Changat Manoj Lakshmikuttyamma Anandavally K. Mathew Joseph Mulder Henry Martyn Narasimha-Shenoi Prasanth G. Narayanan N. Axiomatic characterization of the interval function of a block graph Discrete Math. 338 6 2015 885 894
- Changat Manoj Nezhad Ferdoos Hossein Narayanan Narayanan Axiomatic characterization of the interval function of a bipartite graph Conference on Algorithms and Discrete Applied Mathematics 2017 Springer 96 106
- Changat Manoj Nezhad Ferdoos Hossein Narayanan N. Axiomatic characterization of claw and paw-free graphs using graph transit functions Conference on Algorithms and Discrete Applied Mathematics 2016 Springer 115 125
- Nebeskỳ Ladislav The induced paths in a connected graph and a ternary relation determined by them Math. Bohem. 127 3 2002 397 408
- Morgana Maria Aurora Mulder Henry Martyn The induced path convexity, betweenness, and svelte graphs Discrete Math. 254 1–3 2002 349 370
- Changat Manoj Mathew J. Characterizations of J-monotone graphs Convexity Discrete Struct. 5 2008 47 55
- Changat Manoj Peterin Iztok Ramachandran Abisha Tepeh Aleksandra The induced path transit function and the Pasch axiom Bull. Malaysian Math. Sci. Soc. (2) 39 1 Special Issue: Special Issue: International Conference on Discrete Mathematics 2016 123 134
- Changat Manoj Klavzar Sandi Mulder Henry Martyn The all-paths transit function of a graph Czechoslovak Math. J. 51 2 2001 439 448