
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
An edge labeled graph is a graph whose edges are labeled with non-zero ideals of a commutative ring
. A Generalized Spline on an edge labeled graph
is a vertex labeling of
by elements of the ring
, such that the difference between any two adjacent vertex labels belongs to the ideal corresponding to the edge joining both the vertices. The set of generalized splines forms a subring of the product ring
, with respect to the operations of coordinate-wise addition and multiplication. This ring is known as the generalized spline ring
, defined on the edge labeled graph
, for the commutative ring
. We have considered particular graphs such as complete graphs, complete bipartite graphs and hypercubes, labeling the edges with the non-zero ideals of an integral domain
and have identified the generalized spline ring
for these graphs. Also, general algorithms have been developed to find these splines for the above mentioned graphs, for any number of vertices and Python code has been written for finding these splines.
1 Introduction
The term spline refers to a class of functions used in data interpolation by mathematicians. The simplest spline is a piecewise polynomial function, defined over a subdivided domain, satisfying certain number of smoothness conditions at the nodes (control points) of the subdivision. These smooth curves find extensive use in interpolating complex curves, CAGD and also generate approximate solutions to differential equations. With the application of the algebraic, geometric and topological techniques, the analytic study of splines got enriched both in terms of understanding and applicability. Spline Theory developed independently in topology and geometry. Billera Citation[1] pioneered the study of algebraic splines, introducing methods from Commutative Algebra Citation[2]. Haas Citation[3], Rose Citation[4] and others Citation[5–7] studied the homological and algebraic properties of splines.
Algebraically, the set of splines over a subdivision of domains was seen to be a subring of the product ring (
copies), where
was the ring of polynomials and
denoted number of subdivisions of the domain. Also, it was observed that the above spline ring was a module over the ring of polynomials. Identifying the dimension and finding suitable bases for the free spline modules became an active area of research for many mathematicians, still remaining far from being completely understood Citation[8,9]. Classical splines were piecewise polynomials on polytopes with certain order of smoothness conditions imposed on the boundary faces [Citation10]. Simcha Gilbert, Shira Polster and Julianna Tymoczko [Citation11], expanded the family of objects on which these splines were defined to arbitrary graphs, which they called the generalized splines. Billera and Rose Citation[4] have shown that the spline rings built on the dual graphs of polytopes were equivalent to the generalized spline rings defined on arbitrary graphs [Citation11]. Handschy, Melmick and Reinders [Citation12] have studied the generalized spline modules on cycle graphs over the ring of integers
. They have shown the existence of flow-up basis for the spline modules on cycle graphs, thus proving that these spline modules are free. Bowden and Tymoczko [Citation10] considered the module of generalized splines over the quotient ring
, which is not an integral domain. They have shown that over
, the minimum generating sets are smaller than expected. In fact, it was proved that over a domain, the module of splines contained a free submodule of rank at least the number of vertices [Citation10]. Handschy, Melmick and Reinders [Citation12] have shown that over a PID the module of splines is free with rank equal to the number of vertices. With these, many interesting properties of the generalized splines were studied, which took into consideration the interplay between the graph theoretic and ring theoretic properties. This opened up the possibility of further exploration in this area, as many open questions were left unanswered in these fields.
We have extended the study further and in this paper, we have addressed the open questions posed by Gilbert, Polster and Tymoczko in [Citation11]. We have constructed nontrivial generalized splines for the special cases, where is a complete graph, complete bipartite graph and hypercubes. All these graphs find extensive applications in network theory and hence our work is important as it adds to the understanding of the algebraic structures of these graphs. In fact, one of the graphs that we have considered is a
-dimensional hypercube, which is used to understand structures like communication signals, computer networks, computer graphics, space, virus, etc. We have developed a general algorithm to express the ring of generalized splines for hypercubes of any dimension
2, taking into account the bipartite nature [Citation13] and Hamiltonian property of the graph [Citation14]. Also, Python code was developed which calculated the elements of the generalized spline ring
, for complete graphs and complete bipartite graphs. Throughout our work, we have considered the ring
to be an integral domain and the edge labels as the non-zero ideals of the ring
.
2 Results & methods used
2.1 Preliminaries
In this section, we give the formal definition of the generalized spline ring , for a graph
over a commutative ring
, with the edge labels as the non-zero ideals of the ring
, as discussed in [Citation11]. We then give the fundamental results which describe the algebraic structure of the ring
, along with examples, which are used to construct new generalized splines for the complete graphs, complete bipartite graphs and hypercubes. Throughout the manuscript, we have used the notations of [Citation11], except in some cases which we have mentioned clearly.
The definition of an edge labeled graph is as follows:
2.1.1 Definition
Let
(
,
) be a graph. Let
be an arbitrary commutative ring with identity which is also an integral domain and let
denote the set of all non-zero ideals of
. Let a function
:
be an edge labeling of G by the non-zero ideals of R. Given an edge labeling
, a vertex labeling p : V
R is called a generalized spline if
is in
for every edge
in E. Let
denote the set of all generalized splines of (G,
). Then
is an R-module under the operations of co-ordinate wise addition and scalar multiplication.
The compatibility condition known as “edge conditions” used on the edges are defined as:
2.1.2 Definition
Let G (V,
) be an edge labeled graph. An element p
R, expressed as
p (
,
,
,
) satisfies the edge condition at an edge e
if
.
The set of splines with the edge conditions is denoted by . Each element of
is called a generalized spline. If the edge labeling is clear, it is denoted as
.
We now give the definition of nontrivial generalized spline.
2.1.3 Definition
A nontrivial generalized spline is an element
, that is not in the principal ideal
, where 1 is the identity element in
defined as
.
The following theorem [Citation11] shows that is a ring with unity with the operations of coordinate-wise addition and multiplication.
2.1.4 Theorem
is a ring with unity 1, where
1 for each vertex
.
It is proved [Citation11] that becomes a module over the ring R with the operation of coordinate-wise addition and scalar multiplication where multiplication by
, gives the element
(discussed in [Citation11]) are two examples of the ring of generalized splines and
, defined on the 4-cycle
and the complete graph
. Here, R is any commutative ring with unity and (
) denotes the ideal generated by the single ring element of
.
Fig. 1 Example of a generalized spline on the 4-cycle .
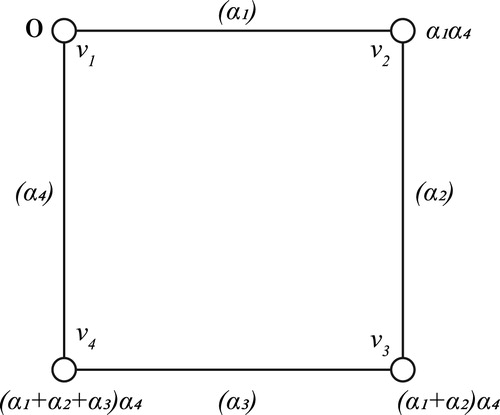
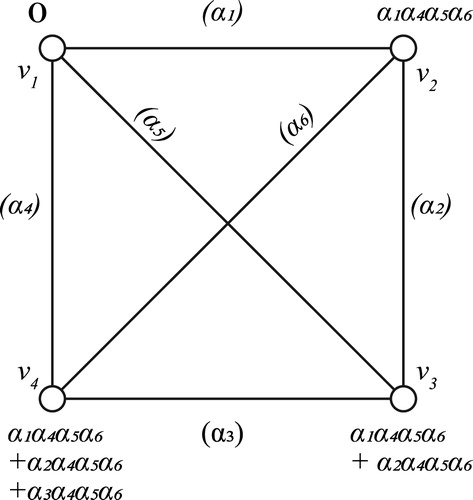
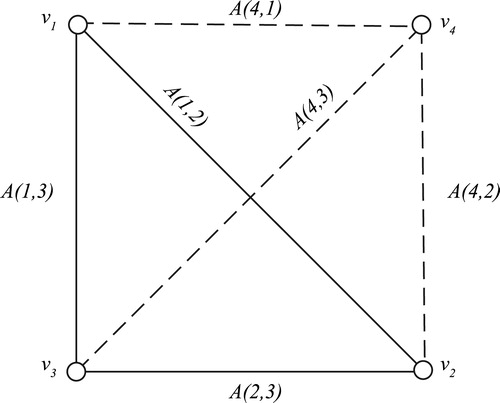
Fig. 2 Example of a generalized spline on the complete graph .
Thus,
(
,
,(
)
,(
)
)
(
,
,
,
) represents a generalized spline for
, because the difference
(
), and similarly for other adjacent vertices.
Another example giving a generalized spline for the complete graph is given in . Once again, a generalized spline on
will be written as
which satisfies the edge conditions for all pairs of adjacent vertices. As discussed earlier, the set of generalized splines on an edge labeled graph has a ring structure and
-module structure like classical splines. Gilbert, Polster and Tymoczko [Citation11] proved foundational results about the set of generalized splines, completely analyzing the ring of generalized splines for trees. They have obtained the generalized splines for arbitrary cycles and have shown that the study of generalized splines for arbitrary graphs can be reduced to the case of different sub graphs, especially cycles or trees.
Basic problems that arise naturally in the theory of generalized splines is that it focuses on particular examples e.g. a particular choice of the ring , the graph
and the edge labeling function
which maps the edges to the ideals of the ring
. Also, the module structure of the ring of generalized splines remains far from being understood in terms of freeness and existence of basis or generating set, for an arbitrary choice of the ring
[Citation11]. However, it is not clear how the ring
will be affected under the graph theoretic constructions such as addition or deletion of vertices.
In the rest of the paper, we have extended the study further and addressed the open question posed by Simcha Gilbert, Shira Polster and Juliana Tymoczko in [Citation11]. We have constructed the ring of generalized splines for the special cases, where G is a complete graph , complete bipartite graph
and also for the hypercubes
. In all these graphs, the ring
is a commutative ring with identity which is also an integral domain and the edge labels are the non-zero ideals of the ring
. Also, the methods of constructing the generalized splines over the complete graphs
(for any
) and complete bipartite graphs
(for any
,
) have been generalized and Python code is developed to write these splines. The bipartite structure and Hamiltonicity of the hypercubes (as defined in [Citation13]) are used to find the general algorithm for writing the set of generalized splines
(for any
).
We discuss the example of generalized spline ring over the ring of integers for the cycle graph
[Citation15].
2.1.5 Example of generalized integer spline on cycle graph 
Here the generalized integer spline
(
,
,
)
, where
is a 3-cycle with the edge labels
,
,
where
,
and
are natural numbers (see ).
Fig. 3 Example of generalized integer spline on the 3-cycle .
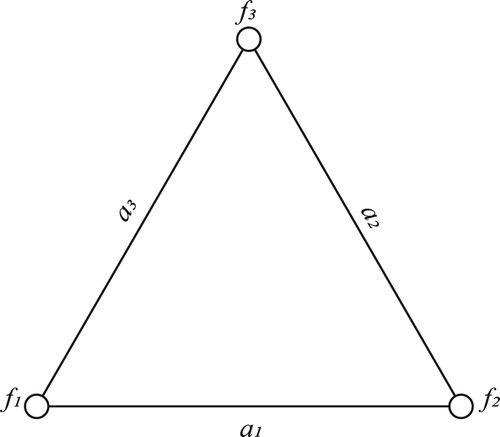
The vertex labels (,
,
) belonging to
satisfy the following conditions
We will refer to the preliminaries in the following subsection, throughout the manuscript.
2.2 Important results on
Some of the important results for the generalized spline ring , relevant to our work are mentioned in this subsection. The first result is theorem 3.8 from [Citation11], which is as follows:
2.2.1 Theorem
Let be a finite edge labeled cycle, given by vertices
,
, …,
in order. Define the vector
with
With arbitrary choices of
,
, and
. Then
is a generalized spline for
. The spline
is nontrivial exactly when
and at least one of the
are non-zero.
We have used the following results (corollaries 5.4 and 5.6 from [Citation11]) in proving our results and in obtaining the nontrivial generalized splines for the graphs that we have considered.
2.2.2 Corollary
If contains any subgraph
for which
contains a nontrivial generalized spline, then
also contains a nontrivial generalized spline.
2.2.3 Corollary
Let be an integral domain. If the graph
contains at least two vertices, then
contains a nontrivial generalized spline.
We will be using the following result for the cycle graph , which is also the complete graph
(Theorem 3.8 [Citation11]) to identify the ring
, for the complete graph
, for
3.
2.3 Generalized splines for complete graphs, ,n 3
First we construct nontrivial generalized splines for complete graph []. Here the edges (
,
), (
,
) and (
,
) of the graph
are labeled with the non-zero ideals
,
and
respectively of the ring
, when
is an integral domain.
Fig. 4 Generalized spline on .
It follows from Theorem 3.8 in [Citation11], a generalized spline on the complete graph
is
Here we see that satisfies the edge conditions on
, because if the vertices
and
are adjacent, then
, as
is a factor of
. Here
represents any element of the edge ideal
.
Let denote the set of all generalized splines of (
,
).
Since is an integral domain and each
is not equal to zero,
contains non-trivial generalized splines.
Using the above result, we have generated the algorithm for developing the generalized spline for the complete graph , for any
.
Also, we will be using the edge conditions (Section 2.1.2) to identify the ring , where graph
is complete bipartite graph
, for any
and
.
2.4 Generalized splines for complete bipartite graphs,
We have generated the algorithm for developing the generalized spline for the complete bipartite graphs with the vertex sets containing
vertices and
containing
vertices. We have used similar notations as above, where we denote the edge ideal corresponding to the edge joining the
th and
th vertices by
and
represents an element of the non-zero ideal
.
We will be using the edge conditions (Section 2.1.2) to identify the ring , where graph
is hypercube
, for
.
2.5 Hypercubes
We have extended the method of writing algorithm for the generalized splines to hypercubes, , for
2 in Section 3.5. Hypercubes, denoted by
, are graphs which find extensive use in coding theory in Computer Science and other areas of Mathematics.
3 Results & discussions
3.1 Complete graphs
In this section, we extend the method of constructing the ring of generalized splines , for any
starting with the ring
for the complete graph
(Section 2.3). In order to get the graph
, we add a new vertex to the graph
and join the new vertex to the existing
vertices in
. In the following constructions we consider the ring
to be a commutative ring with identity and also an integral domain. First we construct the graph
from the graph
and obtain the set of generalized splines
from the ring
.
3.1.1 Complete graph (), 4
We add the vertex to
() and join the new vertex
with the vertices
,
,
of
(). The new edges are labeled with the non-zero ideals
,
,
of integral domain
and
,
,
are the elements of the respective edge ideals. It can be seen that every vertex label for
(Section 2.3) is multiplied by the factor
to get the corresponding vertex labels for the spline
, where
denotes the set of all generalized splines for the edge labeled graph (
,
). It is easily verified that if the new vertex
is labeled with
, then
becomes a generalized spline for
since the edge conditions are satisfied for the adjacent vertices in
. So we have
Fig. 5 Generalized spline on .
, since
is a factor of
.
Similarly we have
Here
is non-zero because
is an integral domain. Also since
is a sub-graph of
and
contains nontrivial generalized splines (Sections 2.2.2, 2.2.3)
also contains nontrivial generalized splines.
Using similar methods, we can identify the ring of generalized splines for the complete graph .
[cvskip-5pt]
3.1.2 Complete graph (), 5
We can get by adding the vertex
to
and the four edges joining
to the four vertices
,
,
,
of
().
Fig. 6 Generalized spline on .
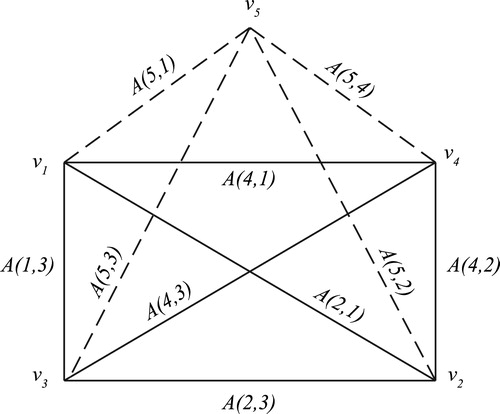
Then in order to get any element of , we multiply each element of
by
(5, 1)
(5, 2)
(5, 3)
(5, 4) and label the added vertex
with the element
(5, 1)
(5, 2)
(5, 3)
(5, 4)
.
Then any element of will be of the form:
Now, we give the algorithm for writing the generalized spline for complete graph , for any
.
3.1.3 Theorem
We obtain the complete graph by adding the
vertex
and the edges (
,
), (
,
), …, (
,
) to the complete graph
. Labeling the new edges with the ideals
, we get the generalized spline ring
, with the elements of the type:
Here, the notations ,
, …,
are as follows:
Proof
We use mathematical induction to prove the algorithm. Let the number of vertices in be
. For
3,
is a cycle graph and it has already been proved in [Citation11] that a generalized spline on
is of the form:
As discussed before, we get the generalized spline for the complete graph
by adding one vertex and three edges to
. The ring of generalized splines
will have elements of the type:
Clearly, the difference of adjacent vertices
and
is a multiple of
, where
is the edge label for the edge joining
and
. We conclude that
satisfies the edge condition for generalized spline over the graph
.
Inductive step: Assume that there exists a generalized spline for the complete graph
. Then we have generalized spline
defined as:
where
,
, …,
are defined as:
Let the vertex ‘’ and the new edges joining the vertex
to the remaining
vertices be added to
to obtain the complete graph
. Let the edge labels of the newly added edges be the ideals
of the ring
.
Taking the th vertex label as
, where
, for
and multiplying each vertex label of the generalized spline for
by
, we get the generalized spline
for
as:
where
is the vertex label for the new vertex
.
Here we can see the difference between the vertex labels of the vertices and any of the remaining
vertices of
is a multiple of
, for
.
Hence, we conclude that satisfies the edge conditions for the generalized spline for
.
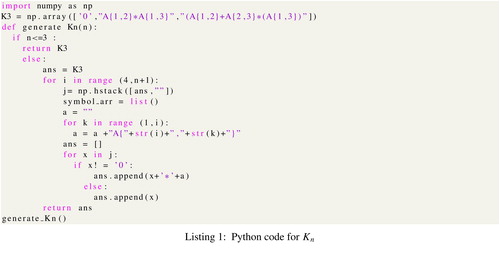
3.1.4 Python code for
The Python code is given as
Next we discuss the complete bipartite graphs.
3.2 Complete bipartite graphs ()
Let (
,
,
) be a complete bipartite graph with vertices partitioned into two disjoint sets
and
, consisting of
and
vertices respectively. Let
be a commutative ring with unity which is an integral domain and let
denote the set of all non-zero ideals of
.
We now extend our method to develop an algorithm for the elements of the generalized spline ring , for the complete bipartite graph
. We consider the simple cases for
,
1, 2 and 3. The vertices are ordered in the clockwise sense, starting with the first left hand side vertex in the set
as the initial vertex.
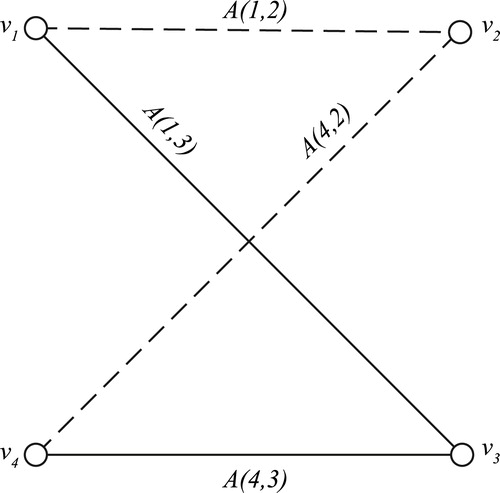
3.2.1 Complete bipartite graph or
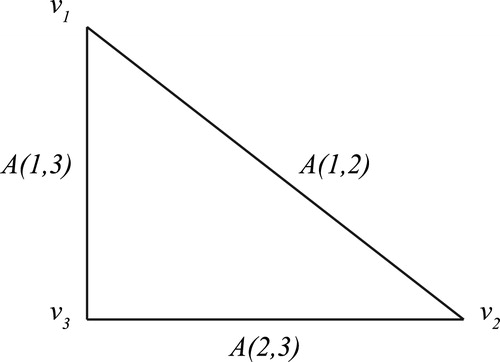
It can be easily seen that constructed in each of the following situations is a generalized spline since the edge conditions are satisfied by the vertex labels of the adjacent vertices (see ).
Fig. 7 Generalized splines on and
.
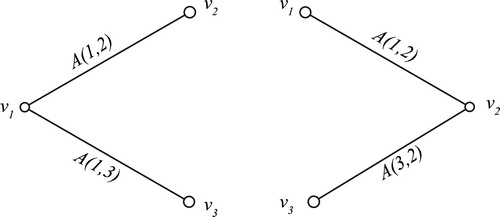
Here the spline is nontrivial since
(1,2) and
(1,3) are non-zero and also the spline
is nontrivial since
is an integral domain.
3.2.2 Complete bipartite graph
With the clockwise ordering of the vertices, we have the generalized spline for the complete bipartite graph as follows (see ):
Also, since
or
is a sub graph of
and
,
contain nontrivial generalized splines (refer Sections 2.2.2, 2.2.3)
also contains nontrivial generalized splines. It can be easily seen that the edge conditions are satisfied by the vertex labels of the adjacent vertices.
Fig. 8 Generalized spline on .
Now we give the generalized spline for the complete bipartite graph as follows ():
Fig. 9 Generalized spline on .
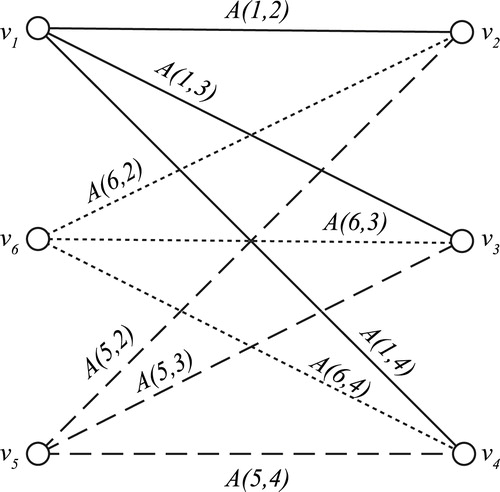
Fig. 10 Generalized spline on .
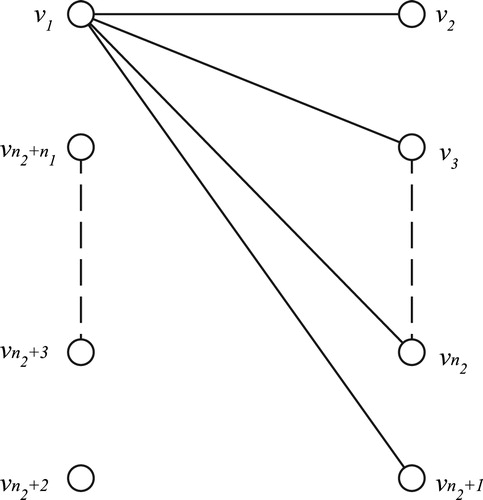
Fig. 11 Hypercubes ,
and
.
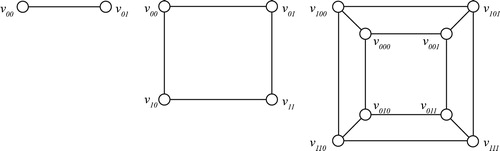
Fig. 12 Hamiltonicity of hypercubes and
.
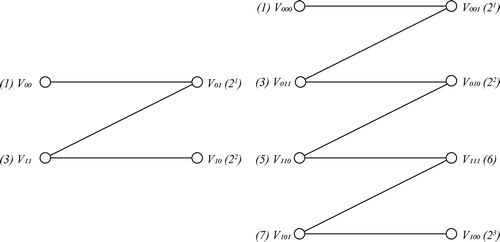
Fig. 13 Bipartite structure of Hypercubes and
.
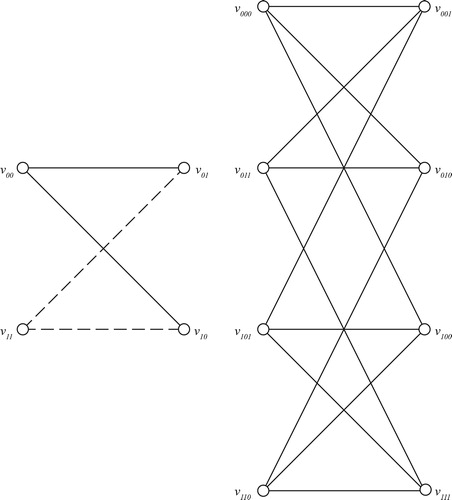
Fig. 14 Graph of Hypercube .
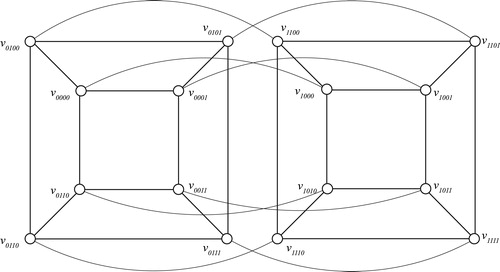
Fig. 15 Bipartite structure and Hamiltonicity of Hypercube .
3.3 Complete bipartite graph
We define and
as
Next, we consider the general case of complete bipartite graph, where the vertex sets
and
contain
and
vertices respectively (see Fig. 10). Here we introduce the notation
3.3.1 Theorem
Let be a complete bipartite graph with vertices partitioned into two disjoint sets
and
, consisting of
and
vertices respectively (Fig. 10). Then, ordering the vertices in clockwise sense as before, the following
gives a generalized spline for the complete bipartite graph
.
where
, for
2,3,
,
.
Proof
The proof of the above theorem follows from the observation that the difference of the vertex labels of adjacent vertices is a multiple of the elements belonging to the corresponding edge ideals. However, we note that the algorithm for generating a generalized spline for any complete bipartite graph holds only for the particular ordering of the vertices in the clockwise sense.
Here
,for
is non-zero since
is an integral domain. Also since
is sub graph of
and
contains nontrivial generalized splines,
also contains nontrivial generalized splines.
Here we give the software code for the above algorithm using Python. Using this we can obtain generalized spline for
, for any value of
,
. Here we have used the notation
for the ideal as well as for the elements of the ideal.
3.4 Python code for
In the following section, we give the method of writing the generalized spline for the -dimensional hypercube
.
3.5 Hypercubes
Before constructing the generalized splines for the -dimensional hypercube
, we discuss about the Gray code, which was given by Frank Gray in 1947 to prevent the spurious output from electro-chemical switches. In the present time, they are widely used for error correction in digital communications. The Gray code is an
-bit code which is an ordering of the
strings of length
over
, such that every pair of successive strings differ in exactly one position. For example a 2-bit Gray code is 00, 01, 11, 10 and a 3-bit Gray code is 000, 001, 101, 111, 011, 010,110, 100. These Gray codes exist for all
[Citation16].
Here we discuss about the -dimensional hypercube
, which is a regular graph with
vertices, where each vertex corresponds to a binary string of length
[Citation17] . Two vertices labeled by strings
and
are joined by an edge if
can be obtained from
by changing a single bit. The hypercubes for
1,2,3 are shown in Fig. 11.
Interestingly, the existence of one dimensional Gray code is related to a basic property of the -dimensional hypercube
, which says that for every integer
,
has a Hamiltonian cycle. Here, the term Hamiltonian cycle means a cycle in a graph
that contains all the vertices exactly once in
[Citation14]. Fig. 12 expresses the Hamiltonian property of
and
.
We define an ordering of the vertices of the hypercube in the same way as they appear in the Hamiltonian cycle. Thus, we number the vertices 1, 2, 3, …, as shown in Fig. 12, with the vertices 2,4,8… expressed as 2,
,
, ….
and call this the Hamiltonian ordering. This helps us in identifying pattern in which the non-zero vertex labels appear in the generalized spline for the
-dimensional hypercube. Also, hypercubes are regular graphs with degree of each vertex equal to
. Another important property of hypercubes which we have used in the construction of generalized splines is the bipartite nature of these graphs [Citation13]. This means that the vertex set of hypercube can be partitioned into two subsets
and
such that
| 1. | No vertices of either of the subsets | ||||
| 2. | Every vertex in | ||||
We give the bipartite representation of the hypercubes for and
(Fig. 13).
3.5.1 Generalized spline for the hypercube
In this section we construct generalized spline for the graph over
which is a commutative ring with identity and also an integral domain. The edges of
are labeled with non-zero ideals of
. The vertices are ordered in the way they appear in Hamiltonian cycle (Fig. 12).
Then it can be easily verified that a generalized spline for is given by:
Here we have used similar notations in previous sections, i.e., , (for
0 or 1) denote an element of the edge ideal associated with the edge joining the vertices
and
. Interestingly, we note that the non-zero vertex labels in
appear for the vertices 2 and
. Next, we construct the generalized spline for
.
3.6 Generalized splines for the hypercube ()
To construct the generalized splines for the hypercube , we refer to the bipartite structure and Hamiltonian ordering of
(Figs. 12 and 13). Then it can be easily verified that a generalized spline for
is given by:
The vertices of are
where (
,
,
) is a binary string of length 3 and two vertices are adjacent if their respective strings differ only at one position. Also, we see that, the Hamiltonian cycle in
is one in which the vertices follow a 3-bit gray code 000, 001, 011, 010, 110, 111, 101, 100. We again give the Hamiltonian ordering to the vertices in
by numbering the vertices 000, …,100 as 1,2, …,8.
Constructing the generalized spline for starts with labeling the vertex
as 0. Now, the vertices adjacent to
are
,
and
, which are numbered as 2,
,
according to Hamiltonian ordering of the vertices. We see that these are the only vertices which are labeled with non-zero elements in
. Also the vertex labels of these vertices are obtained by taking the product of the elements belonging to the edge ideals corresponding to the three edges which are adjacent to these vertices.
It can be verified that with these vertex labelings, becomes a generalized spline for the hypercube
, because the edge conditions are satisfied by the vertex labels of adjacent vertices.
We can extend the above method of writing the generalized spline to higher dimensional hypercubes.
3.6.1 Generalized spline for the hypercube ()
The graph of 4-dimensional hypercube is in Fig. 14.
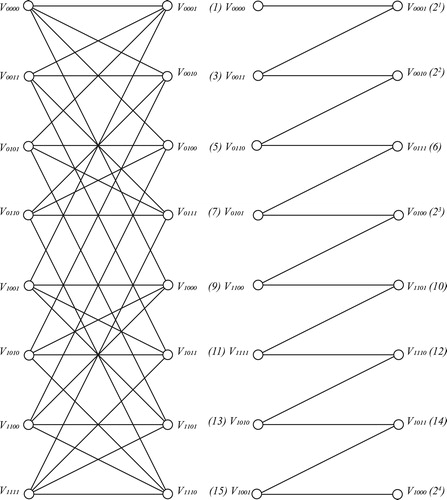
The bipartite structure and Hamiltonian path of the hypercube are as follows (see Fig. 15):
For we have the first vertex as
which is adjacent to the vertices
,
,
and
. Using the bipartite structure of
and Hamiltonian ordering, we get the generalized spline for
as follows:
Once again, we see that the non-zero vertex labels appear only for the vertices numbered as 2, ,
and
. These are the vertices adjacent to the vertex 1 in the Hamiltonian ordering of the vertex
in the bipartite structure. Also, the non-zero vertex labels are obtained by taking the product of the four elements of the edge ideals corresponding to the four edges which are incident to the respective vertices. Thus, the vertex
is labeled with the product of the four elements
, because it is adjacent to the vertices
,
,
and
.
This gives us an algorithm for writing the generalized spline for the edge labeled -dimensional hypercube
, for any
.
3.7 Theorem
Let be an
-regular hypercube with the vertices partitioned into two disjoint subsets
and
, containing
vertices each. We introduce the Hamiltonian ordering for the vertices of
so that the vertices are numbered as 1, 2, 3,
, …,
. Let the first vertex be
in
and adjacent vertices
, …
in
which are numbered as 2,
,
, …,
. The vertex labels corresponding to the generalized spline
defined for
are as follows:
| 1. | The vertex | ||||
| 2. | The vertex | ||||
Then,
Similarly the vertex is labeled as
associated with the
edges adjacent to the vertex
. Then,
…
and so on.
These are the only vertices with non-zero vertex labels where each vertex label is a product of elements belonging to
edge ideals and the remaining vertices are labeled as zero.
It can be easily verified that is a generalized spline on the hypercube
as the edge conditions are satisfied for the adjacent vertices and also,
is nontrivial since
is an integral domain.
4 Conclusions
We conclude our work by developing an algorithm to construct the generalized spline rings for the special graphs such as the complete graphs, complete bipartite graphs and hypercubes. These graphs find important applications in network and approximation theory and the present work adds to the existing knowledge and understanding in these and related areas. Also, it opens a vast field for research as we can think of studying the generalized splines over these and other graphs by changing the base rings to other rings such as the polynomial rings and ring of Laurent polynomials. As these rings are PIDs, we can also try to find suitable bases for the generalized splines for these graphs.
5 List of abbreviations
The following are the list of abbreviations used in this paper:
1. CAGD: Computer-Aided Geometric Design
2. PID: Principal Ideal Domain
References
- BilleraL.J.RoseL.L., A dimension series for multivariate splines Discrete Comput. Geom. 6 2 1991 107–128. 10.1007/BF02574678
- DummitD.Foote.R.Abstract AlgebraInternational Series of Monographs on Physics2003Wiley
- HaasR., Module and vector space bases for spline spaces J. Approx. Theory 65 1 1991 73–89
- RoseL.L., Graphs, syzygies, and multivariate splines Discrete Comput. Geom. 32 4 2004 623–637. 10.1007/s00454-004-1141-3
- DiPasqualeM.R., Shellability and freeness of continuous splines J. Pure Appl. Algebra 216 11 2012 2519–2523. 10.1016/j.jpaa.2012.03.010
- DalbecJ.P.SchenckH., On a conjecture of rose J. Pure Appl. Algebra 165 2 2001 151–154. 10.1016/S0022-4049(00)00175-4URLhttp://www.sciencedirect.com/science/article/pii/S0022404900001754
- BilleraL.J.RoseL.L., Modules of piecewise polynomials and their freeness Math. Z. 209 1 1992 485–497. 10.1007/BF02570848
- YuzvinskyS., Modules of splines on polyhedral complexes Math. Z. 210 1 1992 245–254. 10.1007/BF02571795
- J. Tymoczko, Splines in geometry and topology, ArXiv e-prints (11 2015).
- N. Bowden, J. Tymoczko, Splines mod m, ArXiv e-prints (2015).
- S. Gilbert, S. Polster, J. Tymoczko, Generalized splines on arbitrary graphs, ArXiv e-prints (2013).
- M. Handschy, J. Melnick, S. Reinders, Integer Generalized Splines on Cycles, ArXiv e-prints (sep 2014).arXiv:1409.1481.
- S. F. Florkowski III, Spectral graph theory of the hypercube, Tech. rep. NAVAL POSTGRADUATE SCHOOL MONTEREY CA (2008).
- DybizbaskiJ.SzepietowskiA., Hamiltonian paths in hypercubes with local traps Inform. Sci. 3752017 258–270. 10.1016/j.ins.2016.10.011URLhttp://www.sciencedirect.com/science/article/pii/S0020025516311756
- E. Gjoni, Basis criteria for n-cycle integer splines, Bard College Senior Projects Spring (2015).
- NikolopoulosS.D., Optimal gray-code labeling and recognition algorithms for hypercubes Inform. Sci. 137 1 2001 189–210. 10.1016/S0020-0255(01)00120-7URLhttp://www.sciencedirect.com/science/article/pii/S0020025501001207
- WestDouglas B., Introduction to Graph Theory2000Prentice Hall