
Abstract
In this paper, an approach based on the variational iteration method (VIM) is proposed with an auxiliary parameter to predict the multiplicity of the solutions of homogeneous nonlinear ordinary differential equations with boundary conditions. The proposed approach is capable to predict and calculate all branches of the solutions simultaneously. Four practical problems are chosen to show the efficiency and importance of the proposed method. The proposed approach successfully detects multiple solutions to Bratu’s problem, the model of mixed convection flows in a vertical channel, the nonlinear model of diffusion and reaction in porous catalysts and the nonlinear reactive transport model.
1 Introduction
Inokuti et al. (Citation1978) proposed a general Lagrange multiplier method to solve nonlinear problems, which was intended to solve problems in quantum mechanics. Subsequently, He (Citation1997) has modified the method to an iterative method and named it variational iteration method (VIM) and it has been presented by many authors to be a powerful mathematical tool for solving various types of nonlinear problems which represent plenty of modern science branches (He, Citation2012a, Citation2006; Yang and Baleanu, Citation2013; Wu, Citation2012). But this method cannot provide us with a simple way to adjust and control the convergence region and rate of giving approximate series, this reason was a strong motivation for authors to construct the variational iteration algorithms with an auxiliary parameter h which proves very effective to control the convergence region of an approximate solution as (He, Citation2012b; Hosseini et al., Citation2011; Turkyilmazoglu, Citation2011; Ghaneai et al., Citation2012; Hosseini et al., Citation2010) and others.
It is very important to predict and calculate all solutions of nonlinear differential equations with boundary conditions in engineering and physical sciences. In this regard, many authors constructed the algorithms that are based on the homotopy analysis method (HAM) for multiple solution of nonlinear boundary value problems as Li and Liao, Citation2005; Abbasbandy and Shivanian, Citation2011; Abbasbandy et al., Citation2009; Hassan and El-Tawil, Citation2011; Hassan and Semary, Citation2013" and others. However, in this work, the algorithm based on the variational iteration method (VIM) with an auxiliary parameter is presented in prediction and actual determination of multiple solutions of nonlinear boundary value problems. To show the efficiency and importance of the proposed method, four practical problems are solved. A problem arising in mixed convection flows in a vertical channel (Barletta, Citation1999; Barletta et al., Citation2005), Bratu’s problem (Wazwaz, Citation2012; Jalilian, Citation2010; Wazwaz, Citation2005), the nonlinear model of diffusion and reaction in porous catalysts (Sun et al., Citation2004; Abbasbandy, Citation2008; Magyari, Citation2008) and the nonlinear reactive transport model (Ellery and Simpson, Citation2011; Vosoughi et al., Citation2012), respectively and all of them admit multiple (dual) solutions which is why these models have been chosen to accomplish the article’s goal.
2 Analysis of the method
Consider the nonlinear differential equation(2.1) where L is a linear operator, N is a nonlinear operator and g(t) is an inhomogeneous term. According to the variational iteration method, one can construct an iteration formula for the Eq. Equation(2.1)
(2.1) as follows:
(2.2) where λ(τ) is a general Lagrange multiplier,
is considered as a restricted variation (He, Citation1998; He, Citation1999; Wazwaz, Citation2007; Wazwaz, Citation2009) which means
. To solve Equation(2.1)
(2.1) by He’s VIM (He, Citation1997), we first determine the Lagrange multiplier λ(τ) that can be identified optimally via variational theory. Then, the successive approximations um+1(t), m ⩾ 0 of the solution u(t) can be readily obtained upon using the obtained Lagrange multiplier and by using any selective function u0(t). The initial approximation u0(t) may be selected by any function that just satisfies at least the initial and boundary conditions. With λ(τ) to be determined, several approximations um+1(t), m ⩾ 0, follow immediately. Consequently, the exact solution may be obtained by using the form
(2.3) Ghaneai et al. (Citation2012) constructed a variational iteration algorithm with an auxiliary parameter in the form
(2.4) where h is an auxiliary parameter. The proposed approach to predict the multiplicity of the solutions of homogeneous nonlinear ordinary differential equations with boundary conditions based on the algorithm Equation(2.4)
(2.4) . Let the problem Equation(2.1)
(2.1) be the form
(2.5) with the boundary condition
(2.6)
Firstly by adding the new condition with unknown parameter α in the boundary conditions Equation(2.6)(2.6) and splitting into
(2.7)
(2.8) where u(a) = b is called the forcing condition that comes from original conditions Equation(2.6)
(2.6) . By calculating variation with respect to um(τ) for variational iteration formula Equation(2.2)
(2.2) on the problem Equation(2.5)
(2.5) with the new initial conditions Equation(2.7)
(2.7) , the Lagrange multiplier λ(τ) can be identified as (He, Citation1998; He, Citation1999; Wazwaz, Citation2007; Wazwaz, Citation2009)
(2.9) then the iteration formula Equation(2.4)
(2.4) becomes
(2.10)
It should be emphasized that um+1(t,α,h) can be computed by symbolic software programs such as Mathematica or Maple, starting by an initial approximation u0(t,α) which satisfies at least the initial conditions Equation(2.7)(2.7) . We obtain the approximate solution um+1(t,α,h) for the problem (2.Equation5)
(2.5) and Equation(2
(2.7) .7), but there are still two unknown parameters in the approximate solution um+1 (t,α,h) the unknown parameter α and the auxiliary parameter h, should be determined. The forcing condition Equation(2.8)
(2.8) of the boundary value problem Equation(2.5)
(2.5) reads
(2.11)
The Eq. Equation(2.11)(2.11) has two unknown parameters α and h which control the approximation um+1(t,α,h) that converges to the exact solution. According to Eq. Equation(2.11)
(2.11) , α as function of h, by drawing the Eq. Equation(2.11)
(2.11) gives the so called h-curve. The number of such horizontal plateaus where α(h) becomes constant, gives the multiplicity of the solutions. Also the horizontal plateaus indicate the convergence because the unknown parameter α is a constant value then a horizontal line segment in h-curve which corresponds to the valid region of h.
3 Applications
3.1 Bratu’s problem
Consider Bratu’s problem in one-dimensional planar:(3.12)
(3.13)
Bratu’s problem Equation(3.12)(3.12) nonlinear two boundary value problem with strong nonlinear term eu and parameter β, appears in a number of applications such as the fuel ignition model of the thermal combustion theory, the model of thermal reaction process, the Chandrasekhar model of the expansion of the Universe, questions in geometry and relativity about the Chandrasekhar model, chemical reaction theory, radiative heat transfer and nanotechnology (Wazwaz, Citation2012; Jalilian, Citation2010; Wazwaz, Citation2005). The analytical solution of (3.Equation12)
(3.12) and Equation(3
(3.13) .13) can be put in the following form:
(3.14) where θ is a solution of
. Bratu’s problem has no, one or two solutions when β > βc, β = βc and β < βc respectively, where the critical value βc satisfies the equation
and also βc = 3.513830719 (Wazwaz, Citation2012; Jalilian, Citation2010; Wazwaz, Citation2005). Differentiating Equation(3.14)
(3.14) with respect to x one time and setting x = 0 give
(3.15)
In this study, we apply the present formula Equation(2.10)(2.10) to detect dual solutions to Bratu’s problem for β = 3.
Direct application by the present formula Equation(2.10)(2.10) to Bratu’s problem Equation(3.12)
(3.12) is very difficult, because they contain the strong nonlinear term eu. To overcome this difficulty, differentiating Equation(3.12)
(3.12) with respect to x one time, for β = 3, Bratu’s problem (3.Equation12)
(3.12) and Equation(3
(3.13) .13) becomes
(3.16)
(3.17)
Firstly split the boundary conditions Equation(3.17)(3.17) to
(3.18) and the forcing condition
(3.19)
Now, we apply the formula Equation(2.10)(2.10) , in Eqs. (3.Equation16)
(3.16) and Equation(3
(3.18) .18), then
(3.20) according to the conditions Equation(3.18)
(3.18) , we choose the initial approximation u0(x,α) as:
(3.21)
Using the Mathematica software, starting with u0(x,α), the successive approximations um+1(x,α,h), m ⩾ 0 , can be as followsand so on, with the help of additional forcing condition Equation(3.19)
(3.19) , then
(3.22) and
(3.23) where u(x) is the exact solution Equation(3.14)
(3.14) . The exact values of u′(0) from Eq. Equation(3.15)
(3.15) are 2.319602 and 6.103 for β = 3. We got α as a function of h from Equation(3.22)
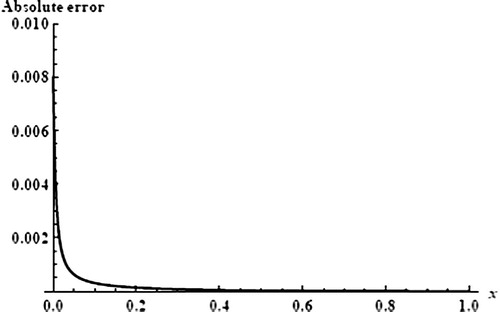
(3.22) that is plotted in . From , two values of α are clear (two line segments give constant values of α) the first and second intervals branch solution are [0.6,1.2] and [0.9,1.1], respectively, when h = 1.02, the first and second branch solutions of u′(0) = α are 2.319609 and 6.109, respectively. Comparing the values of u′(0) by the present approach and exact solution illustrates the accuracy of the present approach. Also, to show the accuracy of these dual approximate solutions, the absolute errors Equation(3.23)
(3.23) for first and second solutions are shown in and , respectively. The and show the present approach success to calculate the first and second solutions of Bratu’s problem Equation(3.12)
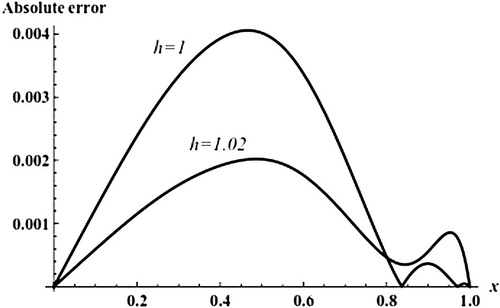
(3.12) for β = 3 and this means that the approach used is capable of detecting dual solution, also shows effect of the auxiliary parameter h, by changing h from 1 to 1.02 the absolute error Equation(3.23)
(3.23) is improved.
Figure 1 Plot α as a function of h at m = 5 in Equation(3.22)(3.22) of Bratu’s problem Equation(3.16)
(3.16) .
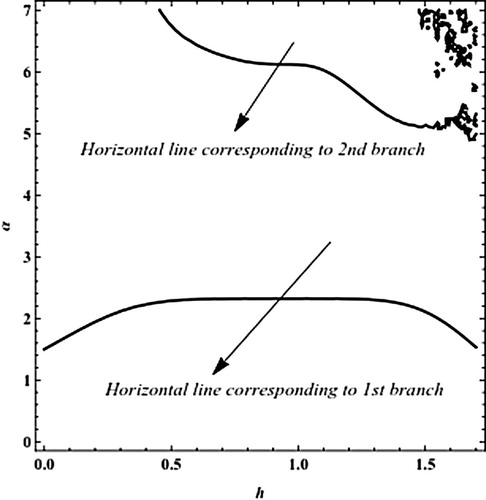
Figure 2 The absolute error Equation(3.23)(3.23) for the first branch solution of Bratu’s problem Equation(3.16)
(3.16) when h = 1.
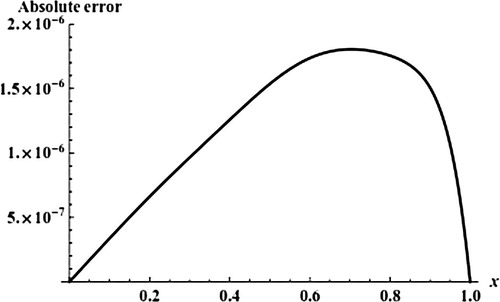
Figure 3 The absolute error Equation(3.23)(3.23) for the second branch solution of Bratu’s problem Equation(3.16)
(3.16) when h = 1 and h = 1.02.
3.2 Mixed convection flows in a vertical channel
The aim of this section is to apply the present approach to detect the multiple solutions of a kind of model in mixed convection flows namely combined forced and free flow in the fully developed region of a vertical channel with isothermal walls kept at the same temperature (Barletta, Citation1999; Barletta et al., Citation2005). In this model, the fluid properties are assumed to be constant and the viscous dissipation effect is taken into account. The set of governing balance equations for the velocity field is reduced to(3.24) with the boundary conditions
(3.25)
In the case E = 0, the Eqs. (3.Equation24)(3.24) and Equation(3
(3.25) .25) are easily solved and admit the unique solution
(3.26)
It has been shown in Abbasbandy and Shivanian, Citation2011; Barletta, Citation1999; Barletta et al., Citation2005" by semi-analytic and numerical methods that Eqs. (3.Equation24)(3.24) and Equation(3
(3.25) .25) admit dual solutions for any given E in the interval ( −∞,0) ∪ (0,Emax) in which Emax ≅ 228.128. According to the initial conditions Equation(2.7)
(2.7) , the boundary condition Equation(3.25)
(3.25) , becomes
(3.27) where γ and α are the unknown parameters and the additional forcing conditions
(3.28)
(3.29)
Now, we apply the formula Equation(2.10)(2.10) , in equations (3.Equation24)
(3.24) and Equation(3
(3.27) .27), then
(3.30) according to the conditions Equation(3.27)
(3.27) , we choose the initial approximation u0(y,α,γ) as:
(3.31)
Using the software of Wolfram’s Mathematica, starting with u0 (y,α,γ), then, the successive approximations um+1 (y,α,γ,h), m ⩾ 0, as followsand so on, with the help of additional forcing conditions (3.Equation28)
(3.28) and Equation(3
(3.29) .29), then
(3.32)
(3.33)
Using the Eq. Equation(3.33)(3.33) to delete the unknown parameter γ of the Eq. Equation(3.32)
(3.32) so that it contains only two unknown parameters α and h. Now, we consider a case study when E = 40. According to the Eq. Equation(3.32)
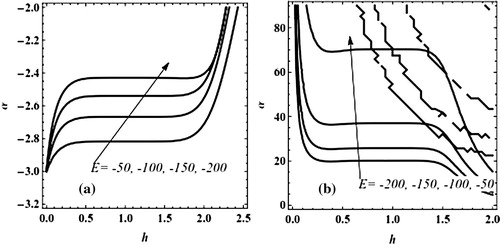
(3.32) , the unknown parameter α as a function of the auxiliary parameter h, has been plotted in the h-range [−0.5,2.5] in , for m = 6 and E = 40. Two α-plateaus (two line segments give constant values of α) can be identified in this figure, this means that there are two solutions. From (a) it is clear that the valid region of h for the first branch solution is [0.5,1.5], also from (b) it is clear that the valid region of h for the second branch solution is [0.8,1.2]. and plot α as a function of the auxiliary parameter h at m = 6 in Eq. Equation(3.32)
(3.32) for different values of E, these figures show the two solutions of α, this means that the approach used is capable of detecting dual solution.
Figure 4 Plot α as a function of h at m = 6 in Equation(3.32)(3.32) for E = 40.
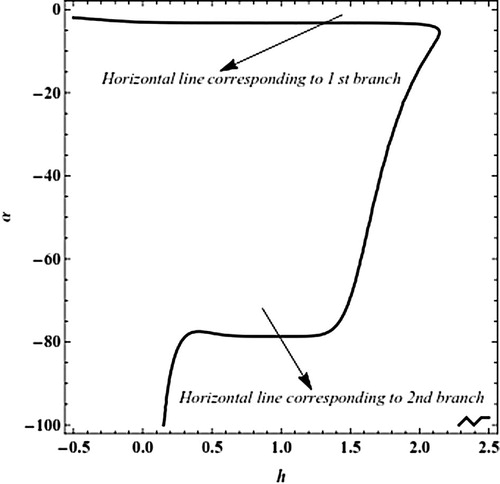
Figure 5 Plot α as a function of h at m = 6 in Equation(3.32)(3.32) for E = 40, (a) the first branch solution and (b) the second branch solution.
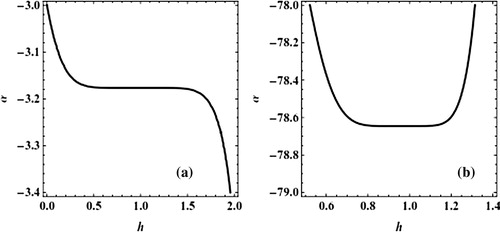
Figure 6 (a, b) Plot α as a function of h at m = 6 in Equation(3.32)(3.32) for different values of positive E.
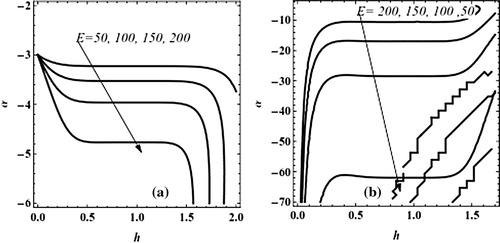
Figure 7 (a, b) Plot α as a function of h at m = 6 in Equation(3.32)(3.32) for different values of negative E.
Comparison between Predictor homotopy analysis method (PHAM) (Abbasbandy and Shivanian, Citation2011) and the present approach when m = 6 and h = 1 for the value of u″(0) = α for different values of E, from the table it is clear that results very close to the results of Abbasbandy and Shivanian, Citation2011, despite the number of iterations m = 6 are very few compared to the number of iterations m = 25 in (Abbasbandy and Shivanian, Citation2011).
Table 1 Comparison between the present approach and the predictor homotopy analysis method (PHAM) (Abbasbandy and Shivanian, Citation2011) of the value of u″(0) = α for different values of E.
3.3 The nonlinear model of diffusion and reaction in porous catalysts
The nonlinear model investigated recently (Sun et al., Citation2004; Abbasbandy, Citation2008; Magyari, Citation2008) describes the steady diffusion-reaction regime in a porous slab with parallel plane boundaries. In dimensionless variables the basic boundary value problem reads(3.34)
(3.35)
As it has been shown in Magyari, Citation2008, the exact solution of the boundary value problem Equation(3.34)(3.34) can be given in the implicit form
(3.36) where α = u(0) and erf(…) denotes the error function. the Eq. Equation(3.36)
(3.36) can also be inverted to the explicit form
(3.37) where Inverf (…) denotes the inverse of the error function (which can be handled by using for e.g. the software of Wolfram’s Mathematica) and from Eq. Equation(3.38)
(3.38) the possible values of α can be determined.
(3.38)
We apply the present approach to detect dual solution of the problem (3.Equation34)(3.34) and Equation(3
(3.35) .35) for a case study of φ = 0.7, firstly split the boundary conditions Equation(3.35)
(3.35) to
(3.39) and the forcing condition
(3.40)
Now, we apply the formula Equation(2.10)(2.10) , in equations. (3.Equation34)
(3.34) and Equation(3
(3.39) .39), then
(3.41) according to the conditions Equation(3.39)
(3.39) , we choose the initial approximation u0(x,α) as:
(3.42)
Using the software of Wolfram’s Mathematica, starting with u0 (x,α), the successive approximations um+1(x,α,h), m > 0 , as followand so on. With the help of the additional forcing condition Equation(3.40)
(3.40) , becomes
(3.43) and
(3.44)
We consider a case study consist of φ = 0.7, exactly from Eq. Equation(3.38)(3.38) the values of unknown parameter α are 0.65415 and 0.2078. Plot of α as function of h according to Eq. Equation(3.43)
(3.43) for m = 7 is shown in . The number of such horizontal plateaus where α(h) becomes constant, gives the multiplicity of the solutions. Two α-plateaus can be identified in this figure, namely α = 0.65417 in the range [1,1.5] of h and α = 0.2073 in the range [1.75,2] of h. Comparing the values of α by the present approach against to exact solution illustrates the accuracy of the present approach. Also, to show the accuracy of these dual approximate solutions, we have shown the absolute errors Equation(3.44)
(3.44) for first and second solutions in and , respectively. The figures show the present approach success to calculate first and second branch solutions of the problem Equation(3.34)
(3.44) at φ = 0.7, this means that the approach used is capable of detecting dual solution.
Figure 8 Plot α as a function of h at m = 7 in Equation(3.43)(3.43) for the problem Equation(3.34)
(3.34) at φ = 0.7.
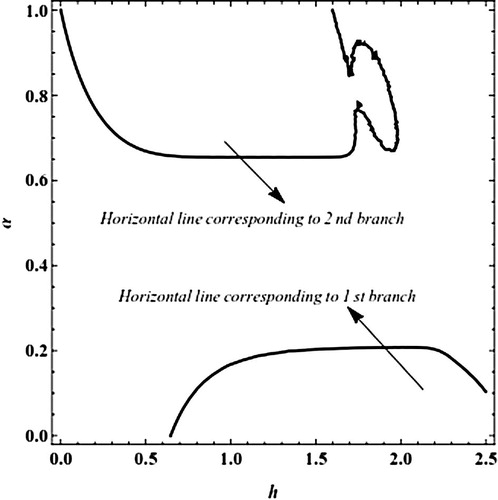
Figure 9 The absolute error Equation(3.44)(3.44) of the first branch solution of the problem Equation(3.34)
(3.34) at h = 1.75.
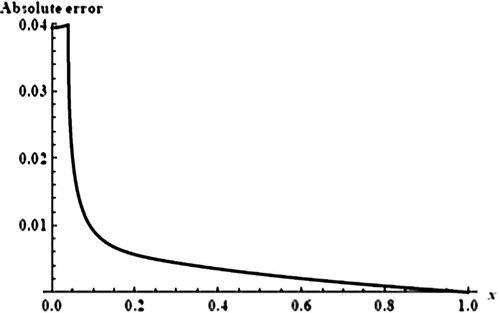
Figure 10 The absolute error Equation(3.44)(3.44) of the second branch solution of the problem Equation(3.34)
(3.34) at h = 1.
3.4 The nonlinear reactive transport model
Consider dimensionless steady state reactive transport model which is governed by (Ellery and Simpson, Citation2011)(3.45) with boundary conditions
(3.46)
The problem Equation(3.45)(3.45) , recently introduced by Ellery and Simpson (Citation2011) , is a kind of modification of the primer model so-called nonlinear reaction–diffusion model in porous catalysts which has been used to study porous catalyst pellets and more, it has been analyzed by different methods (Ellery and Simpson, Citation2011; Vosoughi et al., Citation2012). This model encodes a number of important engineering processes including several applications in chemical engineering (Aris, Citation1975; Henley and Rosen, Citation1969) and environmental engineering (Clement et al., Citation1998; Zheng and Bennett, Citation2002). In Vosoughi et al., Citation2012 the authors show that the problem has two solutions when P = 0, A = 0.5 and B = −0.2, we apply the present approach to detect the dual solutions of the problem if the case consists of P = 0, A = 0.5 and B = −0.2. According to the initial conditions Equation(2.7)
(2.7) the boundary condition Equation(3.46)
(3.46) , becomes
(3.47) where α is the unknown parameter and the additional forcing condition
(3.48)
Now, we apply the formula Equation(2.10)(2.10) , in equations. (3.Equation45)
(3.45) and Equation(3
(3.47) .47) when P = 0, A = 0.5 and B = −0.2, then
(3.49) according to the conditions Equation(3.47)
(3.47) , we choose the initial approximation u0(x,α) as:
(3.50)
Using the software of Wolfram’s Mathematica, starting with u0 (x,α), then, the successive approximations um+1 (x,α,h), m ⩾ 0, as followsand so on. With the help of the additional forcing condition Equation(3.48)
(3.48) , becomes
(3.51) According to the Eq. Equation(3.51)
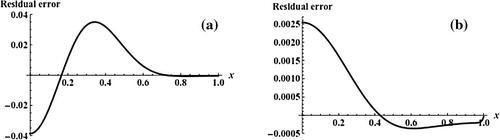
(3.51) , α as a function of the auxiliary parameter h has been plotted in the h-range [0,2] implicitly in . Two α-plateaus can be identified in this figure, namely α = 0.23 in the range [1.2,1.7] of h and α = 0.65 in the range [1.2,1.4] of h. To show the accuracy of these dual approximate solutions, we have shown the residual error R(x,α,h) Equation(3.52)
(3.52) for these solutions in .
(3.52)
Figure 11 Plot α as a function of h at m = 6 in Equation(3.51)(3.51) for the problem Equation(3.45)
(3.45) .
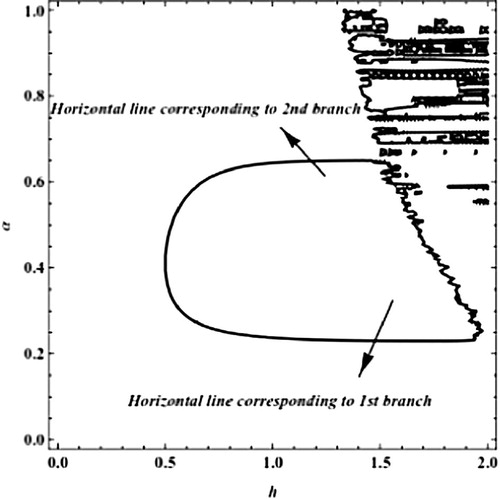
Figure 12 The residual error Equation(3.52)(3.52) for the problem Equation(3.45)
(3.45) when h = 1.2. (a) The first branch and (b) the second branch.
4 Conclusions
The presented approach is proposed based on a variational iteration method with an auxiliary parameter not only to predict the existence of multiple solutions, but also to calculate all branches of solutions effectively at the same time. The most important advantage in this work is using a fixed iteration formula to predict the multiplicity of the solutions of nonlinear homogeneous ordinary differential equations with boundary conditions and using an auxiliary parameter, that provides us with a simple way to control the convergence region and rate of giving approximate series. The scheme is tested on four nonlinear practical differential equations. The results demonstrate reliability and efficiency of the algorithm developed.
Notes
Peer review under responsibility of University of Bahrain.
Related Research Data
References
- S.AbbasbandyApproximate solution for the nonlinear model of diffusion and reaction in porous catalysts by means of the homotopy analysis methodChemical Engineering Journal.1362-32008144150
- S.AbbasbandyE.MagyariE.ShivanianThe homotopy analysis method for multiple solutions of nonlinear boundary value problemsCommun. Nonlinear Sci. Numer. Simulat.149–10200935303536
- S.AbbasbandyE.ShivanianPredictor homotopy analysis method and its application to some nonlinear problemsCommun. Nonlinear Sci. Numer. Simulat.166201124562468
- R.ArisThe Mathematical Theory of Diffusion and Reaction in Permeable Catalysts, The Theory of Steady State1975Clarendon PressOxford http://books.google.com.eg/books/about/The_Mathematical_Theory_of_Diffusion_and.html?id=aT1RAAAAMAAJ&redir_esc=y
- A.BarlettaE.MagyariB.KellerDual mixed convection flows in a vertical channelInt. Commun. Heat Mass Transfer.4823–24200548354845
- A.BarlettaLaminar convection in a vertical channel with viscous dissipation and buoyancy effectsInt. Commun. Heat Mass Transfer.2621999153164
- T.P.ClementY.SunB.S.HookerJ.N.PetersonModeling multispecies reactive transport in ground waterGround Water Monit. Remediat.18219987992
- A.J.ElleryM.J.SimpsonAn analytical method to solve a general class of nonlinear reactive transport modelsChem. Eng. J.1691–32011313318
- H.GhaneaiM.M.HosseiniS.T.Mohyud-DinModified variational iteration method for solving a neutral functional-differential equation with proportional delaysInt. J. Numer. Methods Heat Fluid Flow228201210861095
- H.N.HassanM.A.El-TawilAn efficient analytic approach for solving two-point nonlinear boundary value problems by homotopy analysis methodMath. Methods Appl Sci.3482011977989
- H.N.HassanM.S.SemaryAnalytic approximate solution for Bratu’s problem by optimal homotopy analysis methodCommun. Numer. Anal.20132013114
- J.-H.HeA new approach to nonlinear partial differential equationsCommun. Nonlinear Sci. Numer. Simulat.241997230235
- J.-H.HeApproximate solution of nonlinear differential equations with convolution product nonlinearitiesComput. Methods Appl. Mech. Eng.1671-219986973
- J.-H.HeVariational iteration method – a kind of non-linear analytical technique: some examplesInt. J. Non-Linear Mech.3441999699708
- J.-H.HeSome asymptotic methods for strongly nonlinear equationsInt. J. Mod. Phys. B2010200611411199
- J.-H.HeAsymptotic methods for solitary solutions and compactonsAbs. Appl. Anal.20122012793916
- J.-H.HeNotes on the optimal variational iteration methodAppl. Math. Lett.2510201215791581
- E.J.HenleyE.M.RosenMaterial and Energy Balance Computations1969John Wiley and SonsNew York
- M.M.HosseiniS.T.Mohyud-DinH.GhaneaiOn the coupling of auxiliary parameter, Adomiam’s polynomials and correction functionalMath. Computat. Appl.1642011959968
- M.M.HosseiniS.T.Syed Mohyud-DinH.GhaneaiM.UsmanAuxiliary Parameter in the Variational Iteration Method and its Optimal DeterminationInt J. Nonlinear Sci. Numer. Simulat.1172010495502
- M.InokutiH.SekineT.MuraGeneral use of the Lagrange multiplier in nonlinear mathematical physicsS.Nemat-NasserVariational Method in the Mechanics of Solids1978Pergamon PressOxford156162
- R.JalilianNon-polynomial spline method for solving Bratu’s problemComput. Phys. Commun.18111201018681872
- S.LiS.-J.LiaoAn analytic approach to solve multiple solutions of a strongly nonlinear problemAppl. Math. Comput.16922005854865
- E.MagyariExact analytical solution of a nonlinear reaction–diffusion model in porous catalystsChem. Eng. J.1431-22008167171
- Y.-P.SunS.-B.LiuS.KeithApproximate solution for the nonlinear model of diffusion and reaction in porous catalysts by the decomposition methodChem. Eng. J.10212004110
- M.TurkyilmazogluAn optimal variational iteration methodAppl. Math. Lett.2452011762765
- H.VosoughiE.ShivanianS.AbbasbandyUnique and multiple PHAM series solutions of a class of nonlinear reactive transport modelNumer. Algorithms6132012515524
- A.-M.WazwazAdomian decomposition method for a reliable treatment of the Bratu-type equationsAppl. Math. Comput.16632005652663
- A.-M.WazwazA comparison between the variational iteration method and a domian decomposition methodJ. Computat. Appl. Math.20712007129136
- A.-M.WazwazThe variational iteration method for analytic treatment for linear and nonlinear ODEsAppl. Math. Comput.21212009120134
- A.-M.WazwazA reliable study for extensions of the Bratu problem with boundary conditionsMath. Methods Appl. Sci.3572012845856
- G.C.WuLaplace transform overcoming principle drawbacks in application of the variation iteration method to fractional heat equationsThermal Sci.164201212571261
- X.J.YangD.BaleanuFractal heat conduction problem solved by local fractional variation iteration methodThermal Sci.1722013625628
- C.ZhengG.D.BennettApplied Contaminant Transport Modellingsecond ed.2002Wiley Inter-scienceNew York