
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
In this paper, a stabilized space-time finite element method for solving linear parabolic evolution problems is analyzed. The proposed method is developed on a base of a space-time variational setting, that helps on the simultaneous and unified discretization in space and in time by finite element techniques. Stabilization terms are constructed by means of classical bubble spaces. Stability of the discrete problem with respect to an associated mesh dependent norm is proved, and a priori discretization error estimates are presented. Numerical examples confirm the theoretical estimates.
1. Introduction
Parabolic evolution equations are used to describe numerous physical phenomena, as for example heat transfer. The traditional methods for parabolic problems usually apply a separate method for the time discretization, e.g. implicit Runge–Kutta methods. During the last decades, efficient discontinuous Galerkin finite element methods have been presented for the time discretization of parabolic problems, see, e.g. an analysis for Galerkin time-stepping methods in [Citation1–3], we also refer to the monograph [Citation4]. Adaptive algorithms based on a posteriori error estimates have also been presented and successfully tested for linear and nonlinear problems, see e.g. [Citation5,Citation6] and the references therein. In [Citation7,Citation8], space-time adaptive wavelet methods for parabolic evolution problems have been studied. Also in the literature, p and hp finite element methods for parabolic problems have been presented, see [Citation9,Citation10].
Another approach that has been followed is the derivation of space-time finite element methods, based on appropriate space-time variational settings. The basic idea is to consider the time variable t as just another variable, lets say , if we consider that
are the spatial variables. In that way, the time derivative, which appears in the parabolic PDE model, plays the role of a convection term in the time direction
. By multiplying the given parabolic problem by a space-time test function and applying integration by parts, we can derive the weak space-time formulation. The derived weak formulation helps on the unified space-time discretization by finite element techniques. This means that we discretize the problem in space and in time by using a common finite element space. In this spirit, in [Citation11], space-time finite element methods have been developed for elastodynamics. In particular, the method uses discontinuous Galerkin techniques for the time discretization and incorporates Petrov–Galerkin techniques, see [Citation12], to ensure stability. Stream-line diffusion techniques that are presented in [Citation12], have been also used for developing space-time finite element methods for conservation laws and fluid flow problems, see e.g. [Citation13,Citation14] and the references there. In [Citation15,Citation16], the stability of Petrov–Galerkin discretizations of parabolic problems have been studied and stable space-time trial and test functions have been proposed. In [Citation17], conforming space-time finite element approximations to parabolic problems have been investigated. In [Citation18], upwind-stabilized single-patch space-time Isogeometric analysis (IgA) schemes for parabolic evolution problems are proposed. Recently in [Citation19,Citation20], the authors based on [Citation18], analyzed a time discontinuous Galerkin multipatch IgA scheme and demonstrated the efficiency of a space-time solver implemented on a parallel environment.
In this paper, we focus on the model problem , with zero initial and boundary conditions, and the diffusivity parameter κ is positive and constant. Following standard procedures, e.g. Nitsche techniques for imposing weakly boundary conditions, see [Citation21], the current analysis can be extended to more general initial boundary problems. We propose a new space-time finite element method, which is stabilized by introducing classical bubble spaces, see [Citation22–24]. The bubble basis functions vanish on the edges of the mesh elements and, in addition, do not affect the continuity properties of the solution. By enriching in that way the initial finite element space, the numerical solution consists of two components, where the first lives in the initial finite element space, and the second lives in the bubble space. For developing our analysis, we are motivated and inspired by the subgrid scale stabilization techniques presented in [Citation25,Citation26], for solving linear first-order problems. There, the idea is to couple the initial finite element space with new subgrid scale spaces and to construct artificial diffusion terms in these new spaces. The artificial diffusion terms are added in the numerical scheme in order to ensure stability. The innovation in our approach is that, instead of using subgrid spaces on different meshes, we use bubble spaces and the artificial diffusion terms are formed in these spaces. We include a positive parameter θ in the corresponding bubble diffusion terms, that can control the magnitude of the artificial diffusion in the time direction. We prove stability of the discrete problem with respect to the produced norm, which is a mesh depended norm. Also, optimal error estimates for the full numerical solution containing the bubble component are shown. The latter is achieved by choosing the value of θ to be close to the mesh size but independent of κ. During the discretization error analysis, we analytically present the dependence of the constants on to the diffusivity parameter κ. In the end, this helps to have a clear idea, about the form of the constants that appear in the error bounds for the difference between the solution u and the discrete solution
. In Section 5, we perform tests for different values of κ. To author's knowledge, it is the first time that this type of stabilized space-time finite element methods are presented and analyzed.
The paper is structured as follows. In Section 2, the model parabolic problem is presented. In Section 3, we formulate the stabilized space-time finite element scheme. In Section 4, we present the error analysis and derive the error estimates. We discuss numerical examples in Section 5. The paper closes with the conclusions.
2. The model problem
2.1. Preliminaries
Let Ω be a bounded Lipschitz domain in . Let
be a multi-index of non-negative integers
with degree
. For any
, we define the differential operator
, with
,
. As usual,
denotes the Sobolev space for which
, endowed with the norm
. Let ℓ be a non-negative integer, define
the standard Sobolev spaces endowed with the following norms
and seminorms
. Also we define the subspace
of
Let
with T>0 be the time interval. For later use, we define the space-time cylinder
and its boundary parts
,
and
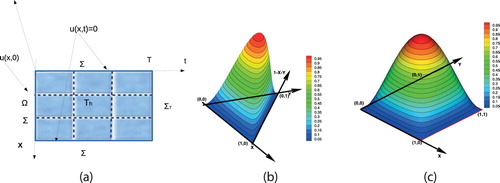
see an illustration Figure (a). We denote the gradient by
, where
is the gradient with respect to the spatial variables. Similarly, we denote by
the normal component on
, with
the components related to space direction and
the component related to time direction. Let
be positive integers, for functions defined in Q, we define the Sobolev spaces
(1a)
(1a)
and the subspaces
(1b)
(1b)
(1c)
(1c)
(1d)
(1d)
For a function
with
, we define the norms and the seminorms
(2a)
(2a)
(2b)
(2b)
Figure 1. (a) The space-time domain Q with the boundary parts and its mesh . (b) The bubble function on the reference triangular mesh element. (c) The bubble function on the reference rectangular mesh element.
We recall Hölder's and Young's inequalities
(3)
(3) that hold for all
and
and for any fixed
.
We will use the following Poincare's inequality: Let be a bounded rectangular domain and let
with
. For simplicity we assume that Γ lies on the plane with
. Let
and
for all
. For any interior point
, we have
(4)
(4) The first inequality in (Equation3
(3)
(3) ) yields
(5)
(5) where the constant
depends on the length of Ω. Integrating (Equation5
(5)
(5) ) over Ω, we can obtain
(6)
(6) We refer to [Citation27] for a proof of (Equation6
(6)
(6) ) for more general domains Ω.
In what follows, positive constants c and C appearing in inequalities are generic constants which do not depend on the mesh-size h and on u. In many cases, we will indicate on what may the constants depend for an easier understanding of the proofs. We will write meaning that
, with
generic constants.
2.2. The model parabolic problem
In the space-time cylinder , with
, we consider the initial boundary value problem
(7)
(7) as a model problem, where the diffusivity parameter
is taken to be constant,
, with
, and
, with
are given functions, and
is the unknown. Using the standard procedure and integration by parts with respect to both x and t, we can easily derive the following space-time variational formulation of (Equation7
(7)
(7) ): find
such that
(8)
(8) with
(9)
(9)
(10)
(10)
The variational problem (Equation8(8)
(8) ) is known to have a unique weak solution, see [Citation28] and in [Citation29,Citation30] for a more comprehensive analysis on existence and uniqueness results. For simplicity, we only consider homogeneous Dirichlet boundary conditions on Σ and
. However, the analysis presented in this paper can easily be generalized to other constellations of boundary conditions.
Assumption 2.1
We assume that the solution u of (Equation8(8)
(8) ) belongs to
with some
.
Note that in Assumption 2.1 we require uniform regularity properties for the solution in x and t directions. In the following Sections we are going to present the discretization error analysis based on Assumption 2.1. In [Citation19,Citation20], error estimates have been given for Isogeometric Analysis methods considering anisotropic regularity properties for the solution u.
3. The discrete problem
3.1. A usual finite element scheme
Let be a partition of space-time domain Q into triangular (or quadrilateral elements), that is
, see Figure (a). We denote by
the diameter of
and the mesh size is defined as
. We assume that
is uniform, i.e. there exists a positive number
, such that
, where
is the diameter of the circle inscribed in
. Associated with
, we define the finite element subspace
of
, consisting of continuous functions in space and in time, by
(11)
(11) where
is the polynomial space of total degree p, see e.g. [Citation31–33]. In our analysis we focus on the case p=1.
The usual finite element approximation of (Equation7(7)
(7) ) would read: find
such that
(12a)
(12a) where
(12b)
(12b)
Setting
in (Equation12a
(12a)
(12a) ) and using the identity
, we have
, and by inequalities (Equation3
(3)
(3) ) and (Equation6
(6)
(6) ), we can obtain the following estimate
(13)
(13) where
is the constant that appears in (Equation6
(6)
(6) ). In the stability estimate (Equation13
(13)
(13) ) the control of
can be very poor if the parameter κ is very small. Furthermore (Equation13
(13)
(13) ) does not provide a direct control of
. Thus in the case where κ is small, the finite element scheme (Equation12
(12a)
(12a) ) may not perform well. Therefore it is crucial to improve the stability properties of (Equation12
(12a)
(12a) ). Next we present a technique for stabilizing the finite element scheme (Equation12
(12a)
(12a) ) by adding artificial diffusion terms, which do not deteriorate the approximate properties of the method. The idea is to enrich the original finite dimensional space by adding a bubble function space, and then to construct the artificial diffusion terms in this space.
3.2. The stabilized scheme
We introduce the larger finite subspace of
that can be written as a direct sum as follows
(14)
(14) with
, where
denotes the space of bubble functions, that vanish entirely on the boundary of the mesh elements and have exactly one degree of freedom in each
. For example, in case of triangular elements, it is spanned by a cubic functions
, where
are linear polynomials vanishing on one side of
and taking the value one at the opposite vertex. The constant
is chosen such that
. Thus, every bubble basis function
satisfies, (i)
for
, (ii)
for
, and (iii)
, with
depending on the uniformity of
but is independent of
. An illustration of bubble functions on two-dimensional elements is presented in Figure (b,c).
Based on defined in (Equation14
(14)
(14) ), any
can be decomposed into two parts, i.e.
with
and
. In view of this, we introduce the discrete problem: find
such that
(15a)
(15a) where
as in (Equation12b
(12b)
(12b) ) and
(15b)
(15b)
with
to be a positive constant, which will be determined later. We recall the following inverse estimate and the scaled trace inequality, see proofs in [Citation31] and in [Citation21].
Lemma 3.1.
Let and let a mesh element
. Then there exist constants
independent of h such that
(16)
(16)
(17)
(17)
For convenience, we introduce the discrete bilinear form
(18)
(18) and the associated mesh dependent norm
(19)
(19) Note that, the terms with the time derivatives in (Equation19
(19)
(19) ) are related to the bubble function space.
Lemma 3.2.
The discrete form defined in (Equation18
(18)
(18) ), is
-coercive with respect to the norm
i.e.,
(20)
(20)
Proof.
Let . Since
and
, it follows by Green's formula
that
(21)
(21) The definition of
and (Equation21
(21)
(21) ) imply
(22)
(22) which is (Equation20
(20)
(20) ) with
and this completes the proof.
Proposition 3.1.
Let be the solution given by (Equation15
(15a)
(15a) ). Then there is a
such that the solution
satisfies the following a priori estimate
(23)
(23)
Proof.
Using as a test function in (Equation15
(15a)
(15a) ), and utilizing (Equation3
(3)
(3) ) and (Equation20
(20)
(20) )) together with the Poincare inequality (Equation6
(6)
(6) ), we successively obtain
(24)
(24) where we have previously used that
and
. Setting
we get (Equation23
(23)
(23) ).
Note that the estimate in (Equation23(23)
(23) ) provides a direct control of
due to the appearance of
in the finite element scheme (Equation15
(15a)
(15a) ), cf. (Equation13
(13)
(13) ). A direct result of (Equation23
(23)
(23) ) and (Equation20
(20)
(20) ) is the following corollary.
Corollary 3.1.
The discrete problem defined in (Equation15(15a)
(15a) ) is well posed, i.e. it has a unique solution which satisfies the stability estimate (Equation23
(23)
(23) ).
Next, we show the boundedness of on
, where the space
is defined in Assumption 2.1. We define the norms
(25a)
(25a)
(25b)
(25b)
We point out that the
is defined for all
and is similar to the
given in (Equation19
(19)
(19) ), which is defined for all
. The mesh-dependent norm
will be used later for deriving bounds for the discretization error.
Lemma 3.3.
There is a constant such that
(26)
(26)
Proof.
Let . We treat every term of the form
separately. We apply integration by parts and (Equation3
(3)
(3) ) to infer
(27)
(27)
where depends on the constants appearing in (Equation16
(16)
(16) ) and (Equation6
(6)
(6) ). Similarly for the second term, applying (Equation3
(3)
(3) ), we get
(28)
(28) Combining all the above bounds and setting
, we can derive the desired result.
4. Error analysis
Proposition 4.1
weak consistency
Let Assumption 2.1 hold and let the solution given by (Equation15
(15a)
(15a) ), and furthermore let
and
. Then
(29a)
(29a)
(29b)
(29b)
Proof.
Multiplying (Equation7(7)
(7) ) by
, integrating over Q, and then applying integration by parts, we arrive at the variational identity
(30)
(30) We recall the problem (Equation15
(15a)
(15a) ) and directly have
(31)
(31) Furthermore, we observe that
for any
, and (Equation29b
(29b)
(29b) ) directly follows.
Lemma 4.1.
Let solve (Equation15
(15a)
(15a) ) and let
. Under Assumption 2.1, there exists a c, independent of h such that
(32)
(32)
Proof.
Let be a function in
. By (Equation29
(29a)
(29a) ) and by subtracting similar terms, we have that
(33)
(33) Setting above
and applying integration by parts on the first term on the left side, we have
(34)
(34) and by applying (Equation3
(3)
(3) ) and (Equation4
(4)
(4) ) on the right hand side, yields
(35)
(35) Gathering the same terms and setting
, we get
(36)
(36) Using
, applying triangle inequality and setting
, the assertion follows.
Below we give the main error bound for the finite element solution .
Theorem 4.1.
Let solve (Equation15
(15a)
(15a) ). Under Assumption 2.1 and choosing
there exist a constant
depending on
in (Equation16
(16)
(16) ), such that
(37)
(37) where
and
, with
and
.
Proof.
Let us consider the functions and
. Using triangle inequality, we decompose the error as
(38)
(38) where we previously set
,
,
, and in the last inequality we used that
We will proceed by giving bounds for every term appearing in (Equation38
(38)
(38) ). We first show few auxiliary results. Let
and
, then using (Equation16
(16)
(16) ), (Equation18
(18)
(18) ) and (Equation29
(29a)
(29a) ) and the fact that
, we can obtain that
(39)
(39) where we previously set
. Using (Equation39
(39)
(39) ) and the relation
(40)
(40) and observing that
, it follows that
(41)
(41) Furthermore, working as in the proof of (Equation26
(26)
(26) ) and using (Equation41
(41)
(41) ) and (Equation3
(3)
(3) ), we can find
(42)
(42) where we used that
, we chose
, and in the last step we set
. Furthermore, using the properties of
and (Equation29
(29a)
(29a) ), we have
(43)
(43) By replacing
and by choosing
in (Equation42
(42)
(42) ), we obtain that
(44)
(44) Now, we can bound the terms in (Equation38
(38)
(38) ). Recalling the definition of
, inequality (Equation44
(44)
(44) ) immediately implies
(45)
(45) Also, combining (Equation39
(39)
(39) ) and (Equation45
(45)
(45) ), we have that
(46)
(46) Finally, inserting the bounds (Equation46
(46)
(46) ) and (Equation45
(45)
(45) ) in (Equation38
(38)
(38) ) and using that
, we obtain
(47)
(47) Setting
, we can derive estimate (Equation37
(37)
(37) ).
Remark 4.1
Let us consider a fixed and let us recall the forms of
and
in (Equation37
(37)
(37) ). Then (i) setting a fixed value
, we have
and
, (ii) setting
, we have that
and
. Note that in the previous cases (i) and (ii), the associated constants depend on
and κ.
Below, we recall some approximation estimates of the finite element space. For the proof we refer to [Citation31].
Lemma 4.2.
Let be integers such that
and let the space
defined in (Equation11
(11)
(11) ). Then for every
with
there exists a linear interpolation operator
such that
(48)
(48) where
and p=1.
Lemma 4.3.
Let the space defined in (Equation11
(11)
(11) ). Let
be an integer, and let a function
with
. There exists a linear interpolation operator
such that
(49a)
(49a)
(49b)
(49b)
where r=2 and
depend on the constants appearing in (Equation17
(17)
(17) ) and in (Equation48
(48)
(48) ), but not on h and v.
Proof.
Introducing the operator of Lemma 4.2 and by applying (Equation17
(17)
(17) ) and (Equation48
(48)
(48) ), we have
(50)
(50) In the same way, we have
(51)
(51) Collecting the estimates (Equation50
(50)
(50) ) and (Equation51
(51)
(51) ), we easily obtain
(52)
(52) which is (Equation49b
(49b)
(49b) ).
Remark 4.2
The interpolation estimates given in (Equation49(49a)
(49a) ) have been derived for linear polynomial spaces, see (Equation11
(11)
(11) ). Analogous estimates can be derived for higher polynomial spaces. In that case we set
.
In the proposed scheme (Equation15(15a)
(15a) ), the parameter θ can control the artificial diffusion terms. Its value can be adjusted according to the needs of the scheme for obtaining optimal approximation properties, see Remark 4.1. Below, we show that if θ is close to the grid size h, we obtain optimal order of convergence. The value of θ can be determined without having to tune it with respect to κ. However, in some finite element schemes the value of θ must be adjusted with respect to h and κ for getting optimal rates, e.g. see discussion for the Galerkin/least square methods in [Citation24,Citation33].
Theorem 4.2
error estimates
Let u be the solution of (Equation7(7)
(7) ) and let
be the solution of (Equation15
(15a)
(15a) ), respectively. Under the Assumption 2.1, the solution
satisfies the estimate
(53)
(53) and moreover for any
,
(54)
(54) with
depending on the constants in (Equation37
(37)
(37) ) and in (Equation49
(49a)
(49a) ) and
on the constants in
(Equation32
(32)
(32) ) and (Equation48
(48)
(48) ).
Proof.
The estimate (Equation53(53)
(53) ) follows directly from (Equation29
(29a)
(29a) ), (Equation37
(37)
(37) ), Remark (4.1) and (Equation49b
(49b)
(49b) ). The estimate (Equation54
(54)
(54) ) follows form (Equation32
(32)
(32) ) and (Equation48
(48)
(48) ).
Remark 4.3
In realistic cases, the solutions of parabolic evolution problems may present an anisotropic regularity behavior, for example different regularities properties with respect to time and to space direction. This may result in the case where the contribution of the discretization error in t direction can be different than the contribution of the discretzation error in x direction. In such cases, it is more appropriate to discretize the problem using anisotropic meshes, using small mesh size in the directions where the solution is less smooth and larger mesh size in the directions where the solution is smoother [Citation34]. This is a topic that we will investigate in a forthcoming paper. A discretization of these type of problems using Isogeometric Analysis methodology is presented in [Citation20].
Remark 4.4
For the sake of simplicity, we have presented the discretization analysis for spaces with degree p=1. However, assuming further regularity properties on u, we can follow the same analysis and to show optimal estimates for spaces with degree p>1, see Example 2 in Section 5.
5. Numerical examples
In this section, we present several numerical examples for validating the theoretical estimates. Although in the analysis, we used linear polynomial spaces, next we perform tests using both linear, (p=1), and second order, (p=2), polynomial spaces, which are combined with the associated cubic bubble space. We perform tests for with d=1 and d=2, using triangular and tetrahedral mesh elements correspondingly. One can apply the proposed method for solving problems on
with d=3. The code that we have at our disposal does not support such calculations yet. Every example has been solved applying several mesh refinement steps with corresponding mesh size
. Every
satisfies the properties mentioned in Section 3. We present tables with the asymptotic convergence rates r of the error. The convergence rates r have been computed by the ratio
, where the error
is computed on
. We mention that we use highly smooth solutions, i.e.
, and thus the expected values for the rates are r=p, see (Equation49b
(49b)
(49b) ) and Remark 4.2. We consider test cases with
, and we study the behavior of the rates for
. Lastly, we point out that since the support of a bubble function is restricted to the interior of the element, we eliminate the associated variable from the produced linear system by static condensation.
Example 1: , p=1. In the first example, the problem is considered in
. The exact solution is given by the formula
(55)
(55)
The source function f is determined by (Equation55(55)
(55) ). Note that u=0 on Σ and
, see (Equation7
(7)
(7) ). In Figure , we plot the exact solution on Q. We solve the problem using linear polynomials, i.e. p=1. We begin by first setting
. The numerical convergence rates for the several levels of the mesh refinement are presented in the second column in Table . They are in good agreement with the theoretically predicted estimates given in (Equation53
(53)
(53) ). The numerical solution
gives optimal convergence rates, i.e. the values of r are very close to one for all the refinement steps. Next, we want to investigate the asymptotic behavior of the numerical convergence rates when the value of κ is small. We perform the same computations by setting
. The associated convergence rates are presented in the last column in Table . We observe that for the first mesh levels, the rates r are a little higher than the expected value. However, as we move on to the last mesh levels, the values of r are close to one, and are in agreement with the values predicted by the theory.
Figure 2. Example 1: The solution u on Q.
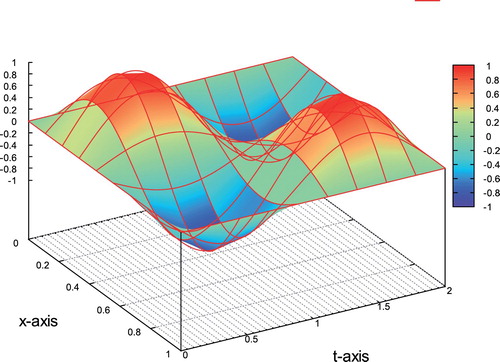
Table 1. Example 1: The convergence rates r.
Figure 3. Example 2: The solution u on Q.
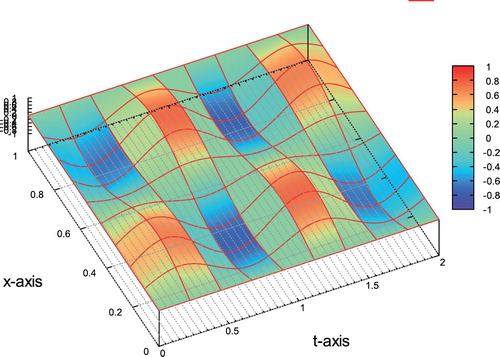
Figure 4. Example 3: The solution u on .
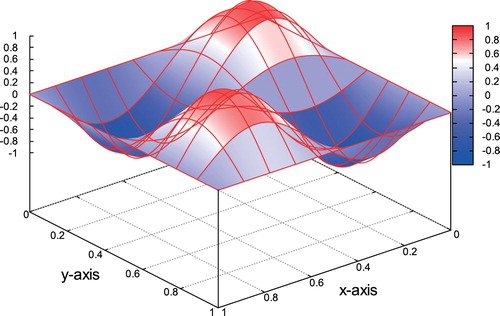
Table 2. Example 2: The convergence rates r.
Table 3. Example 3: The convergence rates r.
Finally, we can conclude that the proposed bubble stabilization finite element scheme performs well for all the examples. The produced numerical solution gives optimal order of convergence in the -norm, when the problems have smooth solutions.
6. Conclusions
In this article, we have proposed and analyzed a bubble stabilized space-time finite element method for solving linear parabolic evolution problems. The construction of the method was based on a space-time variational formulation of the initial PDE problem, which allows the unified space-time discretization by finite element techniques. We presented a discretization error analysis and proved that the method has optimal convergence properties, when and the PDE problem has a smooth solution. The convergence properties are not affected by the choice of the value of the diffusion parameter κ, which appears in the PDE problem. The theoretical results have been verified by performing several numerical examples. A possible extension of our work here is to combine it with time or space-time mesh adaptivity techniques.
Acknowledgements
The author wish to thank Andreas Schafelner for the further validation of the results in Section 5.
Disclosure statement
No potential conflict of interest was reported by the author.
Additional information
Funding
References
- Eriksson K, Johnson C, Thomeé V. Time discretization of parabolic problems by the discontinuous Galerkin method. RAIRO Modél Math Anal Numér. 1985;19:611–643. doi: 10.1051/m2an/1985190406111
- Eriksson K, Johnson C. Error estimates and automatic time step control for nonlinear parabolic problems I. SIAM J Numer Anal. 1987;24:12–23. doi: 10.1137/0724002
- Akrivis G, Makridakis C. Galerkin time-stepping methods for nonlinear parabolic equations. ESAIM: Math Model Numer Anal. 2004;38(2):261–289. doi: 10.1051/m2an:2004013
- Thomeé V. Galerkin finite element methods for parabolic problems, Berlin, Heidelberg: Springer-Verlag; 2006. (Springer series in computational mathematics; vol. 25).
- Eriksson K, Johnson C. Adaptive finite element methods for parabolic problems IV: nonlinear problems. SIAM J Numer Anal. 1995;32(6):1729–1749. doi: 10.1137/0732078
- Eriksson K, Johnson C. Adaptive finite element methods for parabolic problems V: long-time integration. SIAM J Numer Anal. 1995;32(6):1750–1763. doi: 10.1137/0732079
- Schwab C, Stevenson R. Space-time adaptive wavelet methods for parabolic evolution problems. Math Comput. 2009;78:1293–1318. doi: 10.1090/S0025-5718-08-02205-9
- Chegini N, Stevenson R. Adaptive wavelet schemes for parabolic problems: sparsematrices and numerical results. SIAM J Numer Anal. 2011;49:182–212. doi: 10.1137/100800555
- Babuška I, Janik T. The h-p version of the finite element method for parabolic equations. Part I. The p-version in time. Numer Methods Partial Differ Equ. 1989;5(4):363–399. doi: 10.1002/num.1690050407
- Babuška I, Janik T. The h-p version of the finite element method for parabolic equations. II. The h-p version in time. Numer Methods Partial Differ Equ. 1990;6(4):343–369. doi: 10.1002/num.1690060406
- Hughes TJR, Hulbert GM. Space-time finite element methods for elastodynamics: formulations and error estimates. Comput Methods Appl Mech Engrg. 1988;66:339–363. doi: 10.1016/0045-7825(88)90006-0
- Johnson C. Numerical solution of partial differential equations by the finite element method. Cambridge: Cambridge University Press; 1988.
- Hansbo P. Space-time oriented streamline diffusion methods for non-linear conservation laws in one dimension. Commun Numer Methods Eng. 1994;10(3):203–215. doi: 10.1002/cnm.1640100304
- Hansbo P. The characteristic streamline diffusion method for the time-dependent incompressible Navier–Stokes equations. Comput Methods Appl Mech Eng. 1992;99(2–3):171–186. doi: 10.1016/0045-7825(92)90039-M
- Andreev R. Stability of sparse space-time finite element discretizations of linear parabolic evolution problems. IMA J Numer Anal. 2013;33(1):242–260. doi: 10.1093/imanum/drs014
- Andreev R. On long time integration of the heat equation. Calcolo. 2016;53(1):19–34. doi: 10.1007/s10092-014-0133-9
- Steinbach O. Space-time finite element methods for parabolic problems. Comput Methods Appl Math. 2015;15(4):551–556.
- Langer U, Moore SE, Neumüller M. Space-time isogeometric analysis of parabolic evolution problems. Comput Methods Appl Mech Eng. 2016;306:342–363. doi: 10.1016/j.cma.2016.03.042
- Langer U, Neumüller M, Toulopoulos I. Multipatch space-time isogeometric analysis of parabolic diffusion problems. In: Lirkov I, Margenov S, editors. Large-scale scientific computing (LSSC 2017). Cham: Springer; 2017. p. 21–32. (Lecture notes in computer science (LNCS); vol. 10665).
- Hofer C, Langer U, Neumüller M, Toulopoulos I. Time-multipatch discontinuous Galerkin space-time isogeometric analysis of parabolic evolution problems. Electron Trans Numer Anal. 2018;49:1–25. doi: 10.1553/etna_vol49s1
- Antonio Di Pietro D, Ern A. Mathematical aspects of discontinuous Galerkin methods. Vol. 69. Heidelberg: Springer-Verlag; 2012.
- Brezzi F, Bristeau M-O, Franca LP, Mallet M, Rogé G. A relationship between stabilized finite element methods and the Galerkin method with bubble functions. Comput Methods Appl Mech Eng. 1992;96(1):117–129. doi: 10.1016/0045-7825(92)90102-P
- Baiocchi C, Brezzi F, Franca LP. Virtual bubbles and Galerkin-least-squares type methods (Ga.L.S.). Comput Methods Appl Mech Eng. 1993;105(1):125–141. doi: 10.1016/0045-7825(93)90119-I
- Quarteroni A, Valli A. Numerical approximation of partial differential equations. Vol. 23. Berlin, Heidelberg: Springer-Verlag; 1994.
- Guermond JL. Stabilization of Galerkin approximations of transport equations by subgrid modeling. ESAIM: M2AN. 1999;33(6):1293–1316. doi: 10.1051/m2an:1999145
- Guermond JL. Subgrid stabilization of Galerkin approximations of linear monotone operators. IMA J Numer Anal. 2001;21(1):165–197. doi: 10.1093/imanum/21.1.165
- Adams R, Fournier J. Sobolev spaces. 2nd ed. Oxford: Academic Press-imprint Elsevier Science; 2003. (Pure and applied mathematics; vol. 140).
- Ladyzhenskaya OA. The boundary value problems of mathematical physics. New York: Springer; 1985. (Applied mathematical sciences series; vol. 49).
- Zeidler E. Nonlinear functional analysis and its applications, II/A: linear monotone operators. New York: Springer-Verlag; 1990.
- Evans LC. Partial differential equestions. 1st ed. Providence (RI): American Mathematical Society; 1998. (Graduate studies in mathematics; vol. 19).
- Brener SC, Scott LR. The mathematical theory of finite element methods. 3rd ed. New York: Springer-Verlag; 2008. (Texts in applied mathematics; vol. 15).
- Ciarlet PG. The finite element method for elliptic problems. New York (NY): North Holland Publishing Company; 1978. (Studies in mathematics and its applications).
- Ern A, Guermond J-L. Theory and practice of finite elements. New York: Springer-Verlag; 2004. (Applied mathematical sciences; vol. 159).
- Apel T. Interpolation of non-smooth functions on anisotropic finite element meshes. ESAIM: Math Model Numer Anal. 1999;33(6):1149–1185. doi: 10.1051/m2an:1999139