
Abstract
Submarine control room layouts have remained similar across decades of operation, despite the introduction of new technologies that allow for the co-location of the sound and control room. Operation of an inwards, rather than outwards, facing ring control room configuration was examined in three scenarios: Return to Periscope Depth, Inshore Operations, and Dived Tracking. A case study design employed a serving team of qualified submariners participated in all three scenarios with high and low demand. Communications and activities in the control room were recorded and analysed using the Event Analysis of Systemic Teamwork (EAST) method. EAST models collaborative teamwork through social, information, and task networks. The results from the ring configuration were compared to an outward facing baseline of the contemporary control room layout with a separate sound and control room. The ring control room configuration increased communications between operators, leading to a more information exchanged, and more tasks completed.
Practitioner summary: Control room design on submarines, and other domains, has traditionally been outward facing with supervisory staff looking over the shoulders of their subordinates. In this paper, and inward looking control room design was explored, with subordinate staff facing their supervisors. This design resulted in more information exchange and productive work.
Introduction
Contemporary British submarine command rooms have separate sound and control rooms due to legacy constraints from a time when sonar information was solely in an auditory form (Stanton and Roberts Citation2020a). Further constraints from the use of a hull-penetrating periscope meant that the command room was situated on the top deck of the submarine beneath the conning tower (Fay, Stanton, and Roberts Citation2019; Hamburger, Miskimens, and Truver Citation2011; Scott Citation2017). This limited space for the command room necessitated all operators to sit facing towards the submarine’s casing (Stanton and Bessell Citation2014). Advancements in technology, such as noise cancelling headphones and the ability to present sonar signals visually, Liquid Crystal Display screens and networked computing technology, mean that the sound room and control room no longer need to separate (Arrabito, Cooke, and McFadden Citation2005; Fay, Stanton, and Roberts Citation2019; Hamburger, Miskimens, and Truver Citation2011). Furthermore, the introduction of a non-hull penetrating optronics mast that sends images via fibre optic cables means the control room could be moved to a different deck on the ship (Hamburger, Miskimens, and Truver Citation2011; Scott Citation2017).
A previous study conducted by Stanton and Roberts (Citation2020a) examined the co-location of the sound and control rooms with the outwards facing consoles. The results indicated that the removal of legacy constraints led to greater overall productivity. A previously identified bottleneck of information was removed as the Sonar operators (SOPs) and Target Motion Analysis operators (TMA) were able to speak to each other directly (Stanton and Roberts Citation2020a; Roberts, Stanton, and Fay Citation2018). Recommendations included ensuring the Officer of the Watch (OOW) remained central to the command team and a drive to examine novel additions to the command room (Roberts et al. Citation2019).
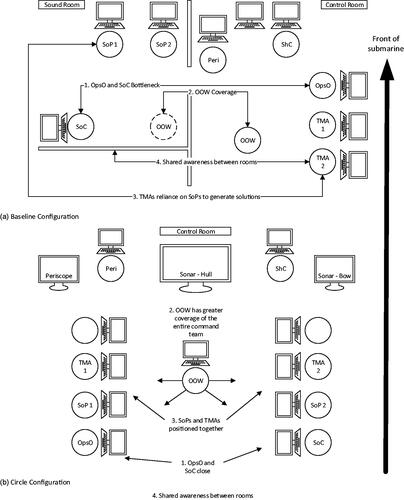
In a submarine control room, the OOW is responsible for decision-making based on the tactical picture created by the command team (Loft et al. Citation2015; Roberts et al. Citation2019). In order to form this tactical picture, multiple command team members are required to integrate information from disparate sources (Dominguez et al. Citation2006). Currently, the OOW in UK submarines is required to move between the sound and control room in order to view all operators’ screens (Dominguez et al. Citation2006; Stanton Citation2014; Stanton and Bessell Citation2014). In the co-location study conducted by Stanton and Roberts (Citation2020a), the OOW was unable to see all operators’ screens from their seated position, despite the co-location of operators dependent on each other for task relevant information. The use of a ring, inwards facing, configuration with repeater screens facing the OOW has the potential to solve this issue. By positioning the OOW in the centre of this ring configuration they would be able to view all operator screens from one position and would remain central to the command team (Roberts et al. Citation2019).
By seating all operators facing inwards, eye contact would be possible with the OOW. Eye contact can be a crucial element of communication (Argyle and Dean Citation1965), is currently only possible if operators turn their head away from the screen they are working on. For operators working on the same task such as SOPs, this may only need to be a slight turn of the head, however, to be able to talk to a superior command team member standing behind them, an operator may be required to completely turn around in order to make eye contact, disengaging their attention from their console completely (Stanton and Bessell Citation2014), as shown in . Eye contact with other operators in the command team can promote greater co-operation and more favourable attitudes (Gardin et al. Citation1973; Wichman Citation1970) Greater co-operation is related to being able to communicate emotional meaning via nonverbal expressions (Wichman Citation1970). Visual cues are key for establishing mutual understanding (Clark and Brennan Citation1991). With lack of visual cues, operators are forced to rely on verbal acknowledgements of information, potentially leading to a greater number of communications between operators (Clark and Brennan Citation1991). Visual cues such as nodding provide feedback that an operator understands the information being conveyed to them, potentially removing the need to verbally confirm (Cassell et al. Citation2001). Furthermore, lack of visual cues may also lead to more interruptions in speech, further inflating communications between operators (Boyle, Anderson, and Newlands Citation1994).
Figure 1. Seating configurations in baseline and ring configuration.
The requirement of operators in a submarine command team to acknowledge receipt of information verbally may be contributing to the issue of the bottleneck between operators identified in previous work (Roberts, Stanton, and Fay Citation2017, Citation2018; Roberts and Stanton Citation2018; Stanton, Roberts, and Fay Citation2017; Stanton and Roberts Citation2018). When SOPs and TMA operators were co-located it was suggested that conditions were met to facilitate non-verbal communications, and that this may have led to a change in the composition of the social, information and task networks (Roberts et al. Citation2019; Stanton and Roberts Citation2020a). The positioning of the OOW in the centre of an inward facing control room has the potential to reduce communications in the control room as they will be able to supplement their own communication with gestures and such gestures may include information that speech omits (McNeill Citation1992).
Submarine control room layouts have been constrained by engineering restrictions, remaining the same across decades of operation (Hamburger, Miskimens, and Truver Citation2011; Stanton Citation2014; Stanton and Roberts Citation2020a). However, technological advancements can facilitate changes to the control room (Arrabito, Cooke, and McFadden Citation2005; Hamburger, Miskimens, and Truver Citation2011; Scott Citation2017). A submarine control room is an excellent example of a sociotechnical system where human operators and technological agents interact in purposeful, goal-directed behaviours (Walker et al. Citation2008). It is critical that technological advancements and changes to the control room be evaluated from a sociotechnical systems perspective in order to fully maximise the capabilities gained (Hamburger, Miskimens, and Truver Citation2011; Stanton Citation2014). In the current work, a team of currently operational submariners undertook three routine scenarios, each at high and low demand, while seated in a novel ring control room configuration with large screen displays. The results from this are discussed and compared to baseline ways of working previously reported by Stanton and Roberts (Citation2018).
Method
To facilitate direct comparison, the methods employed in the current study were identical to those employed during the baseline study and the co-location study (Stanton and Roberts Citation2018, Citation2020a). To avoid repetition, an overview of the method is provided with an emphasis on any changes made to the testing procedure for the current study.
Participants
A team of nine currently operational submariners were recruited from the Royal Navy (RN), participation was voluntary. The makeup of the team was similar to baseline, however, due to logistical limitations a different Lieutenant Commander and Commander were recruited. Security issues limited the collection of demographic information. All participants were male, met requirements to be operational submariners, and had an age range of 25−46. The study protocol received ethical approval from the University of Southampton Research Ethics Committee (Protocol No: 10099) and MoDREC (Protocol No: 551/MODREC/14).
Equipment – the submarine control room simulator
The submarine simulator used for the baseline studies that was representative of a currently operational RN submarine (see Roberts, Stanton, and Fay Citation2015 for full description) was reconfigured to fit Ring configuration testing requirements (see ). The fundamental parts of the simulator remained the same to avoid experimental confounds not associated with the manipulation. The plan for the reconstruction of the simulator was based upon analysis of data collected during baseline studies and thorough review of findings by numerous Subject Matter Experts (SMEs). SMEs included RN personnel, Human Factors researchers and industry partners involved in the design and manufacture of British submarines (e.g. BAE Systems, Thales and Atlas Electronic). The key issues observed with control room configuration and recommendations from SMEs is provided in .
Table 1. Issues and recommendations revealed from baseline studies (Stanton and Roberts Citation2018).
As during baseline testing the simulator was comprised of nine workstations each with two stacked monitors, a keyboard, an input device (mouse) and a communications headset. The workstations ran Dangerous Waters (DW) software, which included networked controllable units from on board a submarine. The same positions as baseline were used including an Operations Officer station (OPSO), a Sonar Controller station (SOC), two SOP stations, two TMA stations, a Periscope station (PERI), a Ship Control station (SHC) and an OOW station. The Ring configuration used the same unclassified set of scenarios as were used in baseline. The scenarios included were Return to Periscope Depth (RTPD), Inshore Operations (INSO) and Dived Tracking (DT). The high demand scenario versions were created by changing the number and behavioural complexity of surrounding contacts. The scenarios were developed by SMEs, and the behaviour of contacts was predetermined, as described in .
Table 2. Description of scenarios completed.
Design and procedure
A single case study approach was used, the independent variables were scenario type (RTPD, INSO and DT) and scenario demand. The dependent variables included all communications between members of the command team and tasks completed. Informed consent was attained, and participants were assigned station roles based upon their operational role within the RN. Once an hour long simulator familiarisation had been completed participants were informed that the first scenario would begin with an OOW briefing and recording devices were started. A short break and refreshments were provided between scenarios. The command team completed all scenarios and each scenario lasted approximately 45 minutes. At the end of the testing day participants were provided with a full debrief and thanked for participating.
Analysis of data
The analysis conducted was identical to baseline studies (Stanton and Roberts Citation2018). Data was analysed using a new shortened form of Event Analysis for Systemic Teamwork (EAST: see Stanton Citation2014). EAST models complex collaborative systems through a network approach. The EAST framework has been applied in many domains including air traffic control (Walker et al. Citation2010), aviation (Stewart et al. Citation2008), emergency services (Houghton et al. Citation2006), road safety (Salmon et al. Citation2014), military risk assessment (Stanton and Harvey Citation2017) and buying and selling activities on the Darknet (Lane et al. Citation2019). Three networks are considered: social, task and information. The social networks examine communications between ‘agents’ within the command team. Information networks describe the information passed between ‘agents’. Task networks describe tasks and their interdependencies. The networks are developed directly from the raw data of video and verbal recordings. These networks were modelled using AGNA software (version 2.1.1 – a software program for computing the Social Network metrics). Leximancer software (version 2.1 – a software program for identifying concepts in text documents) was used to determine the nodes in the information networks. A number of metrics were derived from AGNA allowing a quantitative assessment of the networks to accompany the descriptive models. A collection of global and nodal metrics (also see: Stanton et al. Citation2021) were calculated as defined in .
Table 3. Definitions of metrics used.
Results
Social network analysis
Global metrics
When examining the Ring configuration alone it is clear that the total number of edges, density, cohesion and total interactions were higher in the high demand scenarios compared to the low demand scenarios in all operation types (RTPD, INSO and DT). The number of nodes remains the same as the same number of operators are present in the command regardless of demand. In the high demand scenarios, more operators (nodes) are required to communicate with each other (edges) to cope with the increase in demand (e.g. there are more contacts to handle). For example, if the SOP and TMA operators are required to pass the management of contacts between each other based prioritisation and efficiency ordered by OOW/OPSO/SOC, there will be more communication between all operators (e.g. between SOP1 and SOP2 and TMA1 and TMA2). Compared to when the volume of contacts is low and when the SOP or TMA operators are allocated contacts, they retain those contacts and so fewer operators are required to directly communicate, resulting in fewer edges (see and ).
Figure 2. Social network diagrams for RTPD, INSO, and DT low and high demand scenarios ring configuration.
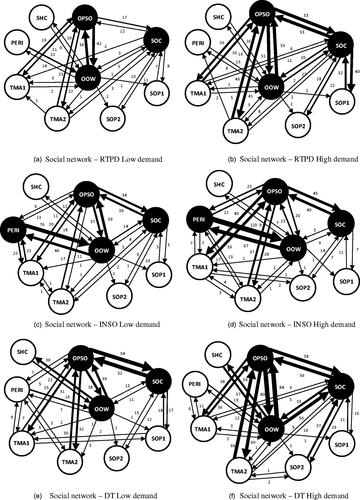
Table 4. Social network metrics for the entire networks of RTPD, INSO, and DT scenarios baseline and Ring configuration.
The fact that both density and cohesion increased in the high demand scenarios is not surprising as they are a representation of edges based on the total number possible. Interestingly, the increases observed in cohesion were much greater than for density, indicating that in the high demand scenarios a much greater proportion of the communications between operators were reciprocal. It is likely that in the low demand scenarios communications between operators primarily include the passage of expected information (e.g. a TMA operator will be ‘expecting’ a speed estimate from a SOP) and so less requesting and repeat requesting of information should occur, resulting in less reciprocity (cohesion). However, in the high demand scenarios, operators are more likely to request information when they require it, as there is a much greater range of tasks to be completed and so the natural flow of information may be less structured. This assertion is further supported by the fact that the cohesion of the social networks was lower in the RTPD scenarios compared to the INSO and DT scenarios, in both low and high demand (e.g. cohesion in low demand INSO and DT is the same as in the high demand RTPD). Returning a submarine to periscope depth is the operation most commonly completed by submariners with a more prescribed/expected set of tasks and procedures that are completed, potentially resulting in more fluid exchanges of information (not bi-directional). An INSO and DT operation is much more dynamic with information constantly being requested and supplied, then quality checked and verified. Again, resulting in more reciprocity and so greater network cohesion (as observed).
When directly comparing the Ring configuration to the baseline configuration the first prominent observation is that differences in edges, density and cohesion are not consistent across different operation types (RTPD vs. INSO vs. DT) or demand (high vs. low). Broadly speaking this seems to indicate that the Ring configuration has increased flexibility in how the command team function, potentially increasing redundancy. An example of this is that the communication between operators (edges) is lower in the Ring configuration RTPD scenarios (high and low demand) compared to baseline. This is a further example of how the proactive manner in which information is exchanged during a RTPD requires fewer operators to communicate as information flows in a more organic fashion. It appears the Ring configuration has facilitated this further, as the number of edges has greatly reduced. This is due to the fact that the bottleneck between the sound room and the picture room (particularly OPSO and SOC as information brokers) has been greatly reduced with the open plan configuration. However, during the INSO low demand scenarios the number of edges are higher, indicating more operators are communicating with each other. This suggests that the Ring configuration does enable more operators to communicate with each other if this is required.
During an INSO the submarine is at periscope depth and so the periscope can periodically be raised to provide contact information that is absolute and removes the ambiguity typically associated with passive sonar. However, periscope cannot be continuously raised (due to issues of covertness) and so additional sensors need to be utilised to supplement the tactical picture. If PERI can directly communicate visual information to more members of the command team then their tasks might be made easier (e.g. direct SOP to a particular bearing so they can search on sonar display). In the low demand scenarios, more communications (particularly involving PERI) between operators occur, optimising information exchange. However, it is important that such communications are optimal in their transition. In the high demand INSO scenarios the number of edges are much greater in baseline than the Ring configuration. This is primarily due to the fact that OPSO (and sometimes OOW) are acting as information brokers (creating bottleneck) between SOC and then to other members of the command team (e.g. TMAs and SOPs). Therefore, information is being required to pass between a greater volume of nodes (more edges) in the baseline studies. The Ring configuration has removed this necessity resulting in fewer edges as command team members (nodes) communicate directly, rather than via multiple addition operators. The Ring configuration appears to have increased command team flexibility in communication exchange, providing more potential for a greater number of operators to communicate (maximised capacity) but such capacity is not always utilised as the command team appears to maximise efficiency.
Nodal network metrics
When examining the Ring configuration alone a greater number of emissions, receptions, and higher sociometric status was observed in the high demand scenarios compared to low demand, across all operation types (RTPD, INSO, and DT). This effect was typically observed for all operators, but the greatest increases typically involved OPSO and SOC, with these operators typically having the highest sociometric status of all the command team members (). These operators are responsible for delegating tasks, quality checking work and effective prioritisation of tasks. It is therefore not surprising that OPSO and SOC communicate more frequently in the high demand scenarios as they are required to prioritise and delegate work concerning a much greater volume of contacts. The primary difference observed in this pattern was during the INSO scenarios where PERI had a higher sociometric status than SOC and displayed the greatest increases in emissions (between low and high demand). During an INSO the periscope can be used to confirm knowledge of surrounding contacts, providing ‘definite’ information to ensure submarine safety, it is therefore not surprising that the sociometric status of OPSO is so high during the INSO scenarios. This highlights that a command team is required to be dynamic in the way they exchange information, as the primary sensors (and operators) being utilised will vary depending on operation type. Furthermore, the large increase in emissions observed for PERI in the high demand scenarios indicates how prevalent a particular operator can become. This is due to the fact that when operating at periscope depth the potential for collisions with surrounding vessels is greatly increased and so periscope is used with much greater frequency to ensure submarine safety.
Table 5. Social network metrics RTPD low and high demand scenario baseline and ring configuration.
A further digression from what is typically observed in the high vs. low demand Ring configuration is observable when examining the centrality of operators. The centrality of some operators increase in the high demand; however, the centrality of other operators decreases. In the INSO scenarios, the centrality of PERI increases (but decreases in the DT scenarios) for reasons discussed previously when completing an INSO. However, the centrality of the OOW increased in all high demand scenarios, regardless of operation type (RTPD, INSO, and DT). It is likely that during the high demand scenarios, due to the volume of contacts that need to be managed, the OOW is required to direct the generation of the tactical picture in a ‘top-down’ fashion to drive information required to make executive decisions (high node centrality). However, in the low demand scenarios the generation of the tactical picture occurs more organically in a ‘bottom-up’ fashion, requiring less intervention from OOW (lower centrality).
When directly comparing the Ring configuration to the baseline configuration the number of emissions, receptions and sociometric status of all operators increased across all operation types (RTPD, INSO, and DT). Again however, the largest increases were seen by OPSO, SOC and OOW, particularly when comparing the high demand scenarios. This is not surprising as it is these operators that take up the higher command responsibilities and decision making; therefore, these operators are required to communicate more frequently to direct contact prioritisation, quality checking and tactical decision making. The sociometric status of OOW, SOC and OOW is was much greater in the Ring configuration suggesting that the Ring configuration has facilitated these operators being able to communicate. However, the greatest increase in communications for SOC and OPSO was with OOW indicating that whilst OPSO and SOC are communicating more, they are acting less as information brokers between the sound and picture room and instead are liaising with OOW about higher command details (e.g. interpretation of tactical picture). However, the greatest deviation from this pattern was observed during the INSO scenarios, in which the sociometric status of SOC exhibited the largest decrease of all operators (across all scenarios), with SOC having similar sociometric status to the TMA operators. This is due to the fact that during an INSO the primary instrument used to guide tactical picture generation is periscope (visual), therefore the input required by SOC in terms of tactical picture generation is greatly reduced (lower sociometric status). However, that is not to say that sonar is not utilised at all during INSO, however it appears the Ring configuration has optimised the transition of information between operators so that SOC is at a similar level to the TMA operators who are responsible for integrating the sonar and visual information to generate contact solutions.
Whilst the sociometric status of PERI is hugely increased in the Ring configuration, further suggesting this configuration facilitates increased command team flexibility that is operation specific. The centrality of most operators was lower in the Ring configuration compared to baseline. However, the centrality of OOW was much greater in all scenarios regardless of operation type and demand. The OOW is the individual who is responsible for integrating and interpreting a wide range of information to ultimately make decisions regarding own submarine behaviour (e.g. own submarine safety and completing mission objectives). It appears that the Ring configuration has increased the centrality of the OOW in the command team as he has been placed in the centre of all incoming information able to watch and communicate with all other command team members. Interestingly, the centrality of the TMA operators was also typically higher. This may be due to the fact that OPSO and SOC are no longer information brokers pacing information exchange to the TMAs. Instead the TMAs can request any information they require (e.g. speed estimates from SOPs), when they require it, directly (rather than via OPSO). This led to an increase in the centrality of the TMA operators.
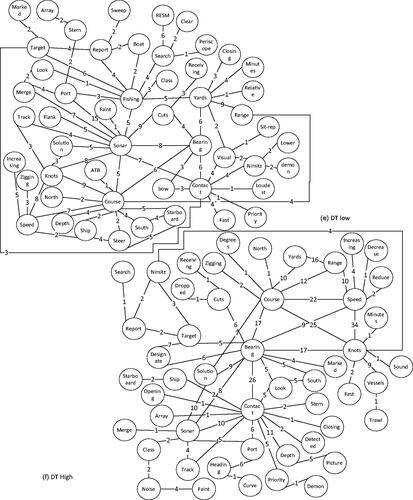
Information network analysis
Global network metrics
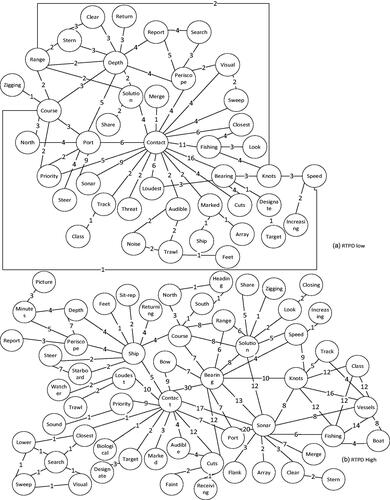
When examining the effect of demand in the Ring configuration scenarios, there are more nodes in the high demand RTPD and DT scenarios but fewer nodes in the high demand INSO scenarios compared to low demand (). The number of nodes present in the network correspond to the amount of key information elements that are communicated by the command team. The fact that there are a greater number of nodes in the high demand RTPD and DT networks suggests that the command team exchange a wider variety of information, this might mean that in the high demand condition the command team are providing more pertinent details, not just that there is a ‘contact’ at a particular ‘bearing’ and ‘range’, but that there is a ‘loud’, ‘closing’ ‘contact’ at a particular bearing and range. This specificity of information exchange allows the command team to ‘prioritise’ ‘contacts’ more quickly so that the tactical picture can be focussed upon ‘vessels’ that pose the greatest ‘threat’ to ‘safety’. This may require the exchange of less information to achieve this during the low demand scenarios as the amount of contacts that are required to be handled is low enough the command team can implicitly ‘prioritise’ all ‘contacts’ without the requirement to decipher which ‘contacts’ require the focus of the command team by use of additional information.
Table 6. Information network metrics for entire network RTPD, INSO, and DT scenarios.
This interpretation is somewhat verified by the fact the information node ‘priority’ had much higher emissions in the high demand scenarios, suggesting passing information to inform prioritisation was crucial. However, during the INSO scenarios the number of nodes was lower in the high demand condition, suggesting fewer different types of information were being exchanged. A reason for this might be that during an INSO the command team uses visual information, this type of information is more definite and reliable, meaning the operators need to be less descriptive when trying to decide if a contact should be prioritised (e.g. if they know the ‘visual’ ‘range’, the command team can prioritise without communicating the ‘loudness’, ‘intensity’ and ‘speed’ of a contact to infer ‘range’ from ‘sonar’). This seems to indicate a different communication strategy depending upon scenario type. In the high demand scenarios, when a command team relies on ambiguous sonar information breath of information exchange increase, when there is more certainty, breadth of information decreases.
When directly comparing the Ring configuration to the baseline configuration it is clear that during baseline, demand has a consistent effect upon the number of nodes, edges, density and total interactions. In all operation types (RTPD, INSO, and DT) most, but not all, high demand scenarios lead to an increase in these metrics. This indicates that in the baseline configuration the way that the command team copes with demand is to communicate more types of information (nodes), more frequently (total), with greater connectivity between a wider range of information (edges and density). However, in the Ring configuration, there is much greater variance in these measures depending upon scenario type and demand (e.g. higher number of edges in high demand RTPD but lower in high demand INSO). This seems to indicate that the Ring configuration has increased the flexibility of the command team to use information efficiently depending on the context of the particular operation. Such flexibility appears to have been facilitated by an increase in overall capacity with more nodes and edges observed in the Ring configuration compared to baseline. This increase in capacity is utilised differently across different operations, just because a team can communicate more information, does not mean they do, this also suggests greater redundancy has been created in the information networks.
Interestingly, the density of the networks is lower in the Ring configuration compared to baseline across all operation types. A decrease in density indicates that the information is less connected, it appears that the reason information is so connected (density) during baseline is due to the fact that operators would chunk the transition of information, saving up multiple ‘contacts’, ‘designations’, ‘speeds’ and ‘course’ information. The reason information was so frequently chunked is due to the bottlenecks in the system and the fact OPSO and SOC were acting as information brokers. This meant that operators would be completing tasks and saving up information until they had a window to pass it. This meant the passage of information was less structured (e.g. a TMA operator is passed 4 ‘contact’ ‘speed’ estimates, not just the ‘contact’ they are generating a ‘solution’ for). However, in the Ring configuration the SOPs and TMAs are positioned next to each other. This means that the TMAs can request particular ‘contact’ information (e.g. ‘speed’, ‘course’ and classification’) when they require it, not sporadically when it can be delivered. This means that information transition is more focussed, structured and task relevant reducing unnecessary connectivity between information nodes, resulting in lower density.
Nodal metrics
When examining the effect of demand in the Ring configuration scenarios it is clear that the emissions and receptions (for bi-directional networks) of the information elements generally increase in the high demand scenarios across all operation types (RTPD, INSO and DT). This is not surprising, as during the high demand scenarios the command team are required to handle a larger number of contacts and so are communicating key information (e.g. ‘bearing’, ‘course’ and ‘range’ of ‘contact’) more frequently (). The type of information that was present in the top 10 (in terms of frequency) varies depending on operation type and demand, which again indicates the flexibility of information type that is shared depending on context. However, the information ‘contact’ and ‘bearing’ is present (often with the highest sociometric status) in all scenarios (RTPD, INSO, DT high and low demand). This is due to the fact that to remain safe, the command team must be aware of ‘contacts’ around own submarine and often, the only definite information they have is ‘bearing’.
Table 7. Information network metrics for individual nodes.
The information that supplements awareness then varies depending on operation type and demand (e.g. during INSO ‘visual’ is present across all scenario types). In the RTPD and DT scenarios the centrality of information present in both the low and high demand scenarios generally increases in the high demand, indicating that pertinent information becomes more pertinent in the high demand scenarios. However, during the INSO scenarios this is not the case with the centrality of most information elements decreasing. This is a further example of how the command team copes with demand differently during an INSO operation, the greater certainty from visual information results in less information (fewer nodes) being more equal in terms of centrality as the command team is more focussed on what information they pass (e.g. only critical information is passed, so centrality is distributed more evenly across the nodes in the network).
When directly comparing the Ring configuration to the baseline configuration it appears that there is consistency between the scenarios in terms of certain information (e.g. ‘bearing’, ‘contact’) but that some of this information is scenario specific. For example, speed is present in the baseline and Ring configurations for the DT scenarios, but not RTPD and INSO. In the DT speed is particularly important as the command team constantly need to update the parameters of the to-be-tracked contact to keep it within adequate tracking range. Similarly, ‘visual’ is present in the baseline and Ring configuration INSO scenarios, as it is during this operation type that ‘visual’ information is predominantly used via ‘periscope’. The fact that certain information is consistent regardless of configuration type highlights that the key information to the command team does not change, but the frequency with which such information is passed was different (e.g. emissions of bearing were higher in the high demand Ring configuration RTPD compared to baseline but lower in the high demand INSO compared to baseline). Again, highlighting that the information networks have greater operation and demand variability due to overall capacity being increased, with such capacity only utilised when necessary. In general, the centrality of all information was much higher in the Ring configuration compared to baseline across all operations types. This provides further validation for the fact that the command team is becoming more focussed and specific with their delivery of information, as opposed to chunked delivery of vast amount of information. The result of which is that the information that is passed between operators has greater centrality as it is more pertinent and is integral to a wider range of additional information, particularly when the information is context specific.
There is also an absence of particular information that was pertinent during baseline and is not present in the Ring configuration. The best operation specific example of this is that ‘Nimitz’ was missing from the ‘top 10 concepts’ in the Ring configuration despite being amongst the most prevalent during baseline. ‘Nimitz’ is the to-be-tracked contact in the DT scenario and so its absence from the ‘top 10 concepts’ in the Ring configuration is puzzling. However, it is not missing from the network entirely and is a central node in the networks (see ). It appears that during baseline, the bottleneck between OPSO and OSC meant that keeping track of the ‘Nimitz’ was constant struggle, as ‘speed’, ‘course’ and ‘solution’ for the ‘Nimitz’ were constantly being requested and required continuous passing of information between the sound and picture areas of the control room. However, in the Ring configuration, once the ‘Nimitz’ had been identified keeping track of it was easier (i.e. due to shared awareness between command team and large shared awareness sonar screens). The ‘Nimitz’ was not mentioned as much as the ‘contact’ was being tracked efficiently.
Figure 3 Information Network diagrams for RTPD, INSO, and DT low and high demand scenarios.
Task network analysis
Global network metrics
The global task network metrics were exactly the same in the Ring configuration as during the baseline studies ( and ). This is due to the fact that, whilst the configuration change affected the flow of and type of information being utilised by the command team, the fundamental tasks being completed and the connectivity between tasks remained the same. The tasks networks for the 3 different operation types are relatively similar in terms of how the tasks are clustered. The primary differences relate to when a particular type of instrument or sensor is used (e.g. periscope vs. sonar) and the sequences in which tasks are completed. For example, during RTPD the periscope will only be used once at the end of the scenario once a particular depth (63 feet) has been reached, relying on sonar for the majority of the scenario. However, during an INSO scenario periscope is routinely raised and lowered in a near continuous fashion, as the command team continuously shifts between utilising visual and sonar information to inform the tactical picture.
Figure 4. Task network diagrams for RTPD low and high demand scenarios.
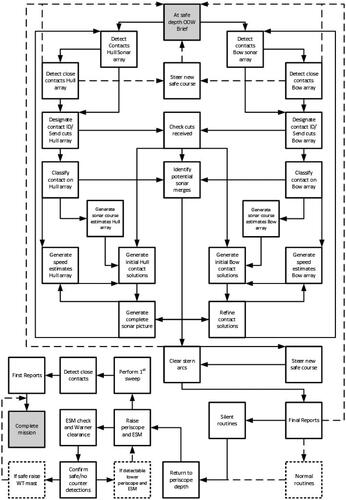
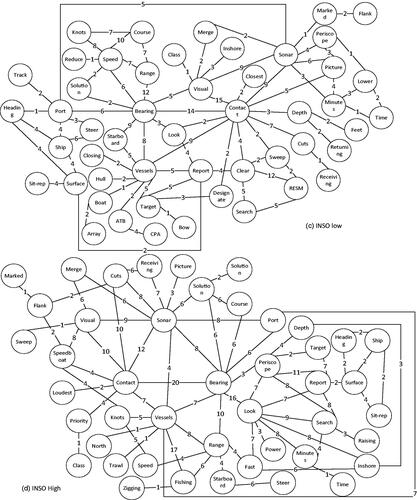
Figure 5. Task network diagrams for INSO low and high demand scenarios.
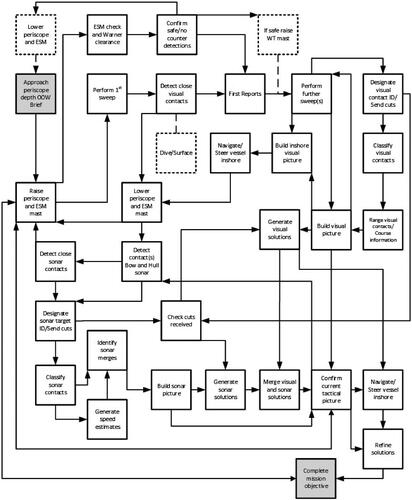
Figure 6. Task network diagrams for DT low and high demand scenarios.
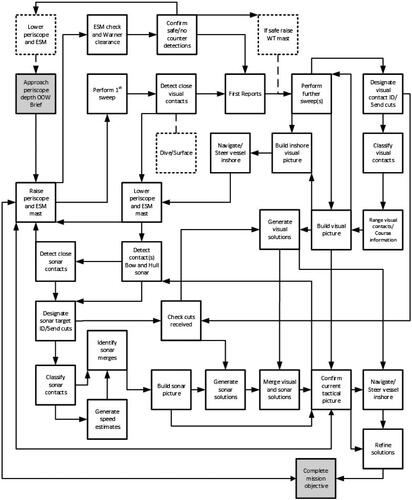
Table 8. Global task metrics.
Individual node task networks
The individual node task network metrics were the same in the baseline study and the Ring configuration, however, the frequency of task completion did change ( and and ). When examining the effect of demand in the Ring configuration scenarios the overall frequency of task completion increased during the high demand scenarios compared to low demand across all operation types (RTPD, INSO, and DT). Again, this was to be expected as during the high demand scenarios there are more contacts for the command team to manage and so the volume of tasks required to be completed for this to be achieved has increased. There were clear differences in the number of tasks completed based upon scenario type. The INSO scenarios had the largest number of tasks completed in the low and high demand scenarios and also had the greatest difference in task frequency between the low and high demand scenarios. The INSO scenario requires the effective integration of visual (from periscope) information with sonar information (when periscope is lowered) to provide the most complete tactical picture. The fact that two information streams (visual and auditory) for each contact, can be processed by the command team, explains why the volume of tasks completed is normally higher, the majority of such task inflation is based around visual tasks. This is clearly observable when examining which task types have the highest frequency of completion, the differences reveal the contextual specifics of each operation type. For example, during INSO the tasks completed with the highest frequency are detect, range and estimate course of visual contacts, as periscope can be used to provide more definite contact information. During a RTPD and DT the tasks completed most frequently are detect and designate sonar contacts, as when operating from deep the primary sensor utilised by the command team is sonar. During a DT steering own submarine and speed estimates were also amongst the most frequently completed tasks as the command team is required to track a contact, following its movements and staying within a particular range (paying attention to speed changes).
Table 9. Task network RTPD.
Table 10. Task networks INSO and DT.
The most striking observation is that many more tasks were completed in the Ring configuration for every type of scenario (RTPD, INSO and DT) in both high and low demand conditions, when compared the baseline condition. However, the most prominent increases in task completion frequency were observed in the high demand scenarios. The increased frequency of task completion indicates that the Ring configuration has increased the capacity of the command team. The improvement in information flow and specificity of information type appears to have facilitated operators completing more tasks than during baseline. However, it also appears that tasks are not being completed unnecessarily, as during the low demand scenarios, the frequency of tasks completions are much more comparable to baseline, however during the high demand scenarios the capacity increase is being maximally utilised. The greatest increase in overall task completion is during the INSO scenarios, particularly the high demand. As mentioned previously this operation involves the most frequent merging of information from different sensors (visual vs. sonar) and so the increased capacity to complete tasks is being utilised where it is more required depending on context. In general, the tasks that were completed most frequently during baseline (scenario specific) are also the tasks that were completed most frequently in the Ring configuration; however, such tasks were completed more frequently. This indicates that the focus of command team in terms of task pertinence has not changed, the new configuration has not altered the tasks, it has made their completion more efficient. Interestingly the type of tasks that have the largest increase in frequency beyond the tasks also completed most frequently in baseline include checking cuts and refining solutions. These tasks involve a quality checking of work (i.e. are cuts being received and can solutions be improved). This indicates that in the Ring configuration an increase in command team capacity has supported task redundancy so that solutions on contacts that were deemed to be poor can be improved and quality process cheques, such as whether data is being adequately received (e.g. check cuts) can be completed more frequently.
Discussion
The current work aimed to investigate how a novel control room ring configuration affected expert submarine command team functionality from a sociotechnical systems perspective (Stanton Citation2014; Walker et al. Citation2009). In comparison to the baseline study (Stanton and Roberts Citation2018), communications between operators were greatly increased across all operation types in the ring configuration. This suggests that the new configuration increased the capacity of operators to communicate, potentially due to the fact that the bottleneck in communications between OPSO and SOC observed in the baseline study has been removed via the co-location of the SOPs and TMAs (Roberts et al. Citation2019; Stanton and Roberts Citation2020a,b). Such increased capacity has the potential to be beneficial to the command team, allowing the command team to be more flexible in order to maximise efficiency. However, the differences in edges, density, and cohesion observed between the different communication types indicates that the greater capacity for communication was not always utilised dependent on scenario type. An increase in the volume of communications between operators can be considered disadvantageous in an environment where maintaining quietness is critical (e.g. for avoidance of counter detection) (Bierly and Spender Citation1995; Kirschenbaum, McInnis, and Correll Citation2009). Trained personnel are accustomed to following Standard Operating ProcedureS (STOPs) when completing missions, allowing communication in an anticipatory fashion (e.g. an operator is expecting a piece of information rather than requesting it). A lack of STOPs appropriate to the new ring configuration may have led to an inflation in communications between operators, highlighting the importance of updating policy and practice (e.g. training) requirements to maximise potential system improvements. However, greater flexibility between scenario types in terms of network structure (e.g. edges, cohesion, and density) has been demonstrated in the new configuration suggesting optimisation may be furthered by updates in constraints such as policy, such as the current command structure (Bateman Citation2011; Stanton and Roberts Citation2018).
The volume of information passed in the control room increased compared to the baseline study (Stanton and Roberts Citation2018). The largest increases were observed for the OPSO, SOC, and OOW, particularly in the high demand scenarios. The maintained importance of the senior operators (OOW, OPSO, SOC) in the Ring configuration is further supported by the OOW having the highest centrality. In the Ring configuration, the OOW is positioned in the centre of the configuration, allowing them to oversee all operators visually and verbally. In such a position the OOW is able to disseminate instructions to the entire command team and monitor for operator understanding via non-verbal cues (Cassell et al. Citation2001; Stanton and Roberts Citation2018). In all scenario types, one of the largest connections observed between operators was between the OPSO and the OOW. It appears that the co-location aspect of the ring configuration allowed the OPSO to focus on supporting the OOW in interpreting the tactical picture, while the SOC communicated directly with the TMA operators (Loft et al. Citation2015, Citation2016). Although the SOPs and TMA operators were co-located, it appears they did not utilise the ability to speak to each other, with TMA operators and SOPs only communicating directly in INSO low, DT low, and DT high. It maybe that these operators engaged in more passive listening or non-verbal communications that were not captured in the current work (Cassell et al. Citation2001; Clark and Brennan Citation1991; Wichman Citation1970). Additionally, the TMA operators could have been observing the large screen displays to ascertain contacts’ bearing or course (Abla et al. Citation2005).
It appears that the Ring configuration has allowed the command team to be more flexible in their use of information, dependent on the context of the particular operation being conducted. The increased number of nodes and edges in the Ring configuration indicate than information transition was more focussed, structured, and task relevant. However, compared to the baseline study, the density of the networks decreased, perhaps due to the fact that operators were no longer ‘chunking’ information and instead, information was passed as it was required (Stanton and Roberts Citation2020a). Such improvements in information flow appear to have facilitated the completion of a greater number of tasks, especially in the high demand scenarios. Indicating that the Ring configuration has increased the capacity of the command team.
The tasks completed with the highest frequency remained consistent between baseline and the Ring configuration. This indicates that the primary task focus of the command team was not altered by the Ring configuration. The number of tasks completed in the Ring configuration was greater than in the baseline study across all scenario types (RTPD, INSO, & DT). This was particularly prominent in the high demand scenarios where the improvements in information flow appear to have facilitated greater capacity in the command team. However, this greater capacity for tasks completion was only utilised when necessary, as, although still higher frequency, the tasks completed in the low demand scenarios were in comparable numbers to those completed at baseline. It appears that the Ring configuration facilitated greater completion of tasks relating to supervisory processes such as checking cuts and refining solutions, as well as more operation specific tasks. For example, in the INSO high demand scenario, the periscope was raised with much higher frequency in the Ring configuration than in the baseline study. In an INSO the command team must continuously raise and lower the periscope and integrate information from sonar in order to inform the tactical picture (Stanton and Roberts Citation2020a). It may be that the shared large screen display of the periscope facilitated the increased use of the periscope mast, which is also reflected in the large number of communications between the OOW and the PERI in the INSO high demand scenario (Abla et al. Citation2005).
There are limitations with the research reported within this paper, which deserved to be considered for future research. The first of which is that this is effectively a single case study that relied upon just one team of serving submariners. Previous research has made the case for single team studies where the participant population is scarce (Stanton and Roberts Citation2020a,b). Previous research has shown that the expert teams are faster and complete more tasks than their novice counterparts (Stanton and Roberts Citation2018, Citation2020a,b). Relatedly, some of the differences between scenarios and conditions were often small and sometime deviated in different directions. Although the research reported in this paper was not formally in the traditional of null hypothesis significance testing, future studies could explore the scenarios and conditions across numerous teams to see if the effects are stable. This is likely to mean employing non-submariners and training them in the tasks, as well as checking to see that the interactions are similar to submariner teams. Finally, it would be useful to have some additional measures of task performance, situation awareness, workload, and coordination to relate to the EAST parameters and strengthen the descriptive results. Such measures are currently being developed and will be reported in future studies from this research programme.
Conclusions and future work
The new inwards facing ring control room configuration has shown an increase in communications between operators, leading to a greater variety of information exchanged, and a higher frequency of tasks completed. However, further work is required to develop appropriate STOPs that could support these changes and better utilise the extra task capacity gained. Greater understanding is needed on how the large screen displays introduced in the current work were used, and how they could potentially be used in the future. The potential negative effect of increased communications in an environment where silence is valued also needs to be considered. Nevertheless, the current work offers insight into how a control room ring design can improve submarine command teamwork.
Acknowledgments
Any views expressed are those of the authors and do not necessarily represent those of the Ministry of Defence or any other UK government department. The authors would like to thank Joy Richardson from the University of Southampton for her help with the collection and transcription of data. The authors would also like to thank the crew members of HMS Trenchant of the Royal Navy, CPO (SSM) D.M Keyes of the Royal Navy, and Christopher Parnell of the Defence Science and Technology Laboratory for their help and guidance.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Abla, G., G. Wallace, D. P. Schissel, S. M. Flanagan, Q. Peng, and J. R. Burruss. 2005. “Shared Display Wall Based Collaboration Environment in the Control Room of the DIII-D National Fusion Facility.” Proc. Workshop on Advanced Collaboration Environments
- Argyle, M., and J. Dean. 1965. “Eye-Contact, Distance and Affiliation.” Sociometry 28 (3): 289–304.
- Arrabito, R., B. E. Cooke, and S. M. McFadden. 2005. “Recommendations for Enhancing the Role of the Auditory Modality for Processing Sonar Data.” Applied Acoustics 66 (8): 986–1005. doi:https://doi.org/10.1016/j.apacoust.2004.11.010.
- Bateman, S. 2011. “Perils of the Deep: The Dangers of Submarine Proliferation in the Seas of East Asia.” Asian Security 7 (1): 61–84. doi:https://doi.org/10.1080/14799855.2011.548213.
- Bierly, P. E., III, and J. C. Spender. 1995. “Culture and High Reliability Organizations: The Case of the Nuclear Submarine.” Journal of Management 21 (4): 639–656. doi:https://doi.org/10.1177/014920639502100403.
- Boyle, E. A., A. H. Anderson, and A. Newlands. 1994. “The Effects of Visibility on Dialogue and Performance in a Cooperative Problem Solving Task.” Language and Speech 37 (1): 1–20. doi:https://doi.org/10.1177/002383099403700101.
- Cassell, J., T. Bickmore, L. Campbell, H. Vilhjálmsson, and H. Yan. 2001. “More than Just a Pretty Face: Conversational Protocols and the Affordances of Embodiment.” Knowledge-Based Systems 14 (1–2): 55–64. doi:https://doi.org/10.1016/S0950-7051(00)00102-7.
- Clark, H. H., and S. E. Brennan. 1991. “Grounding in Communication.” Perspectives on Socially Shared Cognition 13: 127–149.
- Dominguez, C., W. G. Long, T. E. Miller, and S. L. Wiggins. 2006. “Design Directions for Support of Submarine Commanding Officer Decision Making.” Proceedings of 2006 Undersea HSI Symposium: Research, Acquisition and the Warrior, 6–8.
- Fay, D., N. A. Stanton, and A. P. J. Roberts. 2019. “All at Sea with User Interfaces: From Evolutionary to Ecological Design for Submarine Combat Systems.” Theoretical Issues in Ergonomics Science 20 (5): 632–658. doi:https://doi.org/10.1080/1463922X.2019.1582115.
- Gardin, H., K. J. Kaplan, I. J. Firestone, and G. A. Cowan. 1973. “Proxemic Effects on Cooperation, Attitude, and Approach-Avoidance in a Prisoner’s Dilemma Game.” Journal of Personality and Social Psychology 27 (1): 13–18. doi:https://doi.org/10.1037/h0034456.
- Hamburger, P., D. Miskimens, and S. Truver. 2011. “It is Not Just Hardware and Software, Anymore! Human Systems Integration in US Submarines.” Naval Engineers Journal 123 (4): 41–50. doi:https://doi.org/10.1111/j.1559-3584.2009.00198.x.
- Houghton, R. J., C. Baber, R. McMaster, N. A. Stanton, P. M. Salmon, R. Stewart, and G. H. Walker. 2006. “Command and Control in Emergency Services Operations: A Social Network Analysis.” Ergonomics 49 (12–13): 1204–1225. doi:https://doi.org/10.1080/00140130600619528.
- Kirschenbaum, S. S., S. L. McInnis, and K. P. Correll. 2009. “Contrasting Submarine Specialty Training: Sonar and Fire Control.” Development of Professional Expertise 271.
- Lane, B. R., P. M. Salmon, A. Cherney, D. Lacey, and N. A. Stanton. 2019. “Using the Event Analysis of Systemic Teamwork (EAST) Broken-Links Approach to Understand Vulnerabilities to Disruption in a Darknet Market.” Ergonomics 62 (9): 1134–1149. doi:https://doi.org/10.1080/00140139.2019.1621392.
- Loft, S., V. Bowden, J. Braithwaite, D. B. Morrell, S. Huf, and F. T. Durso. 2015. “Situation Awareness Measures for Simulated Submarine Track Management.” Human Factors 57 (2): 298–310. doi:https://doi.org/10.1177/0018720814545515.
- Loft, S., D. B. Morrell, K. Ponton, J. Braithwaite, V. Bowden, and S. Huf. 2016. “The Impact of Uncertain Contact Location on Situation Awareness and Performance in Simulated Submarine Track Management.” Human Factors 58 (7): 1052–1068. doi:https://doi.org/10.1177/0018720816652754.
- McNeill, D. 1992. “Guide to Gesture Classification, Transcription, and Distribution.” In Hand and Mind What Gestures Reveal about Thought, 75–104. Chicago, Illinois: The University of Chicago Press.
- Roberts, A. P. J., and N. A. Stanton. 2018. “Macrocognition in Submarine Command and Control: A Comparison of Three Simulated Operational Scenarios.” Journal of Applied Research in Memory and Cognition 7 (1): 92–105. doi:https://doi.org/10.1016/j.jarmac.2018.01.006.
- Roberts, A. P. J., N. A. Stanton, and D. Fay. 2015. “The Command Team Experimental Test-Bed Stage 1: design and Build of a Submarine Command Room Simulator.” Procedia Manufacturing 3: 2800–2807. doi:https://doi.org/10.1016/j.promfg.2015.07.745.
- Roberts, A. P. J., N. A. Stanton, and D. Fay. 2017. “Land Ahoy! Understanding Submarine Command and Control during the Completion of Inshore Operations.” Human Factors 59 (8): 1263–1288. doi:https://doi.org/10.1177/0018720817731678.
- Roberts, A. P. J., N. A. Stanton, and D. Fay. 2018. “Go Deeper, Go Deeper: Understanding Submarine Command and Control during the Completion of Dived Tracking Operations.” Applied Ergonomics 69: 162–175. doi:https://doi.org/10.1016/j.apergo.2018.02.003.
- Roberts, A. P. J., N. A. Stanton, D. Fay, and K. A. Pope. 2019. “The Effects of Team co-Location and Reduced Crewing on Team Communication Characteristics.” Applied Ergonomics 81: 102875. doi:https://doi.org/10.1016/j.apergo.2019.102875.
- Salmon, P. M., M. G. Lenné, G. H. Walker, N. A. Stanton, and A. Filtness. 2014. “Using the Event Analysis of Systemic Teamwork (EAST) to Explore Conflicts between Different Road User Groups When Making Right Hand Turns at Urban intersections.” Ergonomics 57 (11): 1628–1642. doi:https://doi.org/10.1080/00140139.2014.945491.
- Scott, R. 2017. “Leaving the Periscope behind: Optronic Masts Transform the above-Water Picture.” Jane’s Navy International 122 (4): 22.
- Stanton, N. A. 2014. “Representing Distributed Cognition in Complex Systems: how a Submarine Returns to Periscope Depth.” Ergonomics 57 (3): 403–418. doi:https://doi.org/10.1080/00140139.2013.772244.
- Stanton, N. A., and K. Bessell. 2014. “How a Submarine Returns to Periscope Depth: Analysing Complex Socio-Technical Systems Using Cognitive Work Analysis.” Applied Ergonomics 45 (1): 110–125. doi:https://doi.org/10.1016/j.apergo.2013.04.022.
- Stanton, N. A., and C. Harvey. 2017. “Beyond Human Error Taxonomies in Assessment of Risk in Sociotechnical Systems: A New Paradigm with the EAST “'Broken-Links' Approach”.” Ergonomics 60 (2): 221–233. doi:https://doi.org/10.1080/00140139.2016.1232841.
- Stanton, N. A., and A. P. J. Roberts. 2018. “Examining Social, Information, and Task Networks in Submarine Command and Control.” IEEE Transactions on Human-Machine Systems 48 (3): 252–265. doi:https://doi.org/10.1109/THMS.2017.2720659.
- Stanton, N. A., and A. P. J. Roberts. 2020a. “Better Together? Investigating New Control Room Configurations and Reduced Crew Size in Submarine Command and Control.” Ergonomics 63 (3): 307–317. doi:https://doi.org/10.1080/00140139.2019.1654137.
- Stanton, N. A., and A. P. J. Roberts. 2020b. “Block off: An Examination of New Control Room Configurations and Reduced Crew Sizes Examining Engineered Production Blocking.” Cognition, Technology & Work 22 (1): 29–55. doi:https://doi.org/10.1007/s10111-019-00542-x.
- Stanton, N. A., A. P. J. Roberts, and D. Fay. 2017. “Up Periscope: understanding Submarine Command and Control Teamwork during a Simulated Return to Periscope Depth.” Cognition, Technology & Work 19 (2–3): 399–417. https://doi.org/https://doi.org/10.1007/s10111-017-0413-7.
- Stanton, N. A., A. P. J. Roberts, D. Fay, and K. Pope. 2021. “Returning to Periscope Depth in a Circular Control Room Configuration.” Cognition, Technology and Work doi:https://doi.org/10.1007/s10111-020-00654-9.
- Stewart, R., N. A. Stanton, D. Harris, C. Baber, P. M. Salmon, M. Mock, K. Tatlock, L. Wells, and A. Kay. 2008. “Distributed Situation Awareness in an Airborne Warning and Control System: application of Novel Ergonomics Methodology.” Cognition, Technology & Work 10 (3): 221–229. doi:https://doi.org/10.1007/s10111-007-0094-8.
- Walker, G. H., N. A. Stanton, C. Baber, L. Wells, H. Gibson, P. M. Salmon, and D. P. Jenkins. 2010. “From Ethnography to the EAST Method: A Tractable Approach for Representing Distributed Cognition in Air Traffic Control.” Ergonomics 53 (2): 184–197. doi:https://doi.org/10.1080/00140130903171672.
- Walker, G. H., N. A. Stanton, P. M. Salmon, and D. P. Jenkins. 2008. “A Review of Sociotechnical Systems Theory: A Classic Concept for New Command and Control Paradigms.” Theoretical Issues in Ergonomics Science 9 (6): 479–499. doi:https://doi.org/10.1080/14639220701635470.
- Walker, G. H., N. A. Stanton, P. M. Salmon, and D. P. Jenkins. 2009. Command and Control: The Sociotechnical Perspective. Aldershot, UK: Ashgate Publishing.
- Wichman, H. 1970. “Effects of Isolation and Communication on Cooperation in a Two-Person Game.” Journal of Personality and Social Psychology 16 (1): 114–120. doi:https://doi.org/10.1037/h0029845.