
ABSTRACT
Academic research on automated vehicles (AVs) has to date been dominated by the fields of engineering and computer science. Questions of how this potentially transformative technology should be governed remain under-researched and tend to concentrate on governing the technology’s early development. We respond in this paper by exploring the possible longer-term effect of government (lack of) intervention.
The paper tests the hypothesis that a “laissez-faire” governance approach is likely to produce less desirable outcomes in a scenario of mass uptake of AVs than would a well-planned set of government interventions. This is done using two prominent themes in transport policy – traffic flow and accessibility – in a scenario of high market penetration of Level-5 automated vehicles in capitalist market economies. The evidence used is drawn from a literature review and from the findings of a set of workshops with stakeholders.
We suggest that a laissez-faire approach will lead to an increase in traffic volume as a result of a growing population of “drivers” and a probable increase in kilometres driven per passenger. At the same time, the hoped-for increases in network efficiency commonly claimed are not guaranteed to come about without appropriate government intervention. The likely consequence is an increase in congestion. And, with respect to accessibility, it is likely that the benefits of AVs will be enjoyed by wealthier individuals and that the wider impacts of AV use (including sprawl) may lead to a deterioration in accessibility for those who depend on walking, cycling or collective transport.
We consider the range of possible government intervention in five categories: Planning/land-use; Regulation/policy; Infrastructure/technology; Service provision; and Economic instruments. For each category, we set out a series of interventions that might be used by governments (at city, region or state level) to manage congestion or protect accessibility in the AV scenario described. Many of these (e.g. road pricing) are already part of the policy mix but some (e.g. ban empty running of AVs) would be new. We find that all interventions applicable to the management of traffic flow would also be expected to contribute to the management of accessibility; we define a small number of additional interventions aimed at protecting the accessibility of priority groups.
Our general finding is that the adoption of a package of these interventions could be expected to lead to better performance against generic traffic-flow and accessibility objectives than would a laissez-faire approach, though questions of extent of application remain.
In our conclusions, we contrast laissez-faire with both anticipatory governance and “precautionary” governance and acknowledge the political difficulty associated with acting in the context of uncertainty. We point out that AVs do not represent the first emerging technology to offer both opportunities and risks and challenge governments at all levels to acknowledge the extent of their potential influence and, in particular, to examine methodically the options available to them and the potential consequences of pursuing them.
1. Introduction
The technological transition towards vehicle automation is making rapid progress in numerous high-income countries (Chan, Citation2017). Level 4 and 5 automated vehicles (SAE International, Citation2016)Footnote1 are already being tested on public roads and public spaces in several countries including the USA, Singapore, the UK, the Netherlands and France. National governments are racing to position themselves as leaders in this field by enabling the technology to be tested (KPMG International, Citation2018). Although a growing body of literature has started to explore the potential social, behavioural and societal consequences of AV deployment, the vast majority of the academic literature published so far has focused on technological issues linked with AVs (Cavoli, Phillips, Cohen, & Jones, Citation2017). Whilst it is understandable that most of the writing on this topic concentrates on the technology - which is in its infancy - rather than on its implications, anticipating the potential impact this disruptive technology is likely to have is becoming more pressing. Where writing – both the academic and grey literature – is weak is on the question of how this technology and its development could and should be governed. There is some work being done on governance as (examples include Clark, Parkhurst, & Ricci, Citation2016; Guerra, Citation2016; Stilgoe, Citation2018; Thomopoulos & Givoni, Citation2015 and we acknowledge other work as relevant throughout the body of this paper), though most published material deals with the governance of the technology’s early development (ITF, Citation2015; Wagner, Baker, Goodin, & Maddox, Citation2014). There is little work being done on the potential impact of government intervention or lack of it in the medium and long-term. What role should governments play in steering the development of this technological innovation towards desirable societal outcomes? To what extent should governments intervene? These are two of the questions which will be explored in this paper.
1.1. Rationale & hypothesis
Our rationale in approaching this paper is that governments have a significant role to play in shaping the impact of AVs upon society, the economy and the environment; an argument supported by several authors (Anderson et al., Citation2014; Clark et al., Citation2016; Enoch, Citation2015; Fox, Citation2016). The extent to which public authorities should influence, interfere or shape the development of this technological innovation is a complex issue which requires careful consideration. This paper attempts to contribute to the debate. It is based on the hypothesis that a “laissez-faire” governance approach (as defined below) is likely to produce less desirable outcomes in a scenario of mass uptake of AVs than would a well-planned set of government interventions. We pursue this hypothesis by exploring two themes: the potential long-term impact of AVs’ high penetration on traffic flow and on accessibility (as further explained below). We first investigate the likely effects of “laissez-faire” government in these two areas before examining a set of interventions available to governments wishing to engage successfully with this technology with the aim of identifying whether better outcomes can be achieved.
1.2. Scope of inquiry
This paper explores the possible consequences of government (non)intervention with a particular focus on capitalist market economies, in particular liberal and conservative states, as categorised by Esping-Andersen (Esping-Andersen, Citation1990). This includes the more “liberal” of them: Australia, Canada, United States, New Zealand, Ireland, United Kingdom and the more “conservative”: Italy, Japan, France, Germany, Finland, Switzerland. These states, in particular the most liberal, tend to prioritise a market-driven approach to innovation and social problems. This paper investigates the issues this approach could lead to in relation to automated vehicles and makes some recommendations regarding potential government intervention. Here the term “government(s)” includes public authorities at the national, regional and local level and the term governance refers to policy-making processes at the national and subnational level (e.g. local authorities) (Hooghe, Citation2001). The understanding of governance processes mainly focuses on public authorities’ practice, whilst recognising that in numerous countries a variety of societal actors are incorporated into policy-making (Atkinson & Coleman, Citation1992, p. 156; Loorbach, Citation2010).
This paper interrogates the potential impact of automated vehicles categorised as Level 5 or above as described by the Society of Automotive Engineers (SAE).Footnote2 In other words, the scenarios we describe envision a future where automated vehicles will be able to carry out the driving task in its entirety without human intervention. Importantly, we also assume that AVs will be very safe and that road accident rates will have significantly decreased compared to current conditions – although we acknowledge that this assumption is still the subject of debate (Hancock, Citation2018).
1.2.1. “Laissez-faire” scenario
This paper examines the potential consequences of a “Laissez-faire” scenario in the context of market economies.Footnote3 In simple economic terms “Laissez-faire” is defined as the “Abstention by governments from interfering in the workings of the free market”.Footnote4 The more precise definition and complexities associated with this term have been widely discussed amongst social science scholars (Simons, Citation1948; Vojnovic, Citation2003). The extent to which governments intervene in a “Laissez-faire” scenario varies greatly depending on the political context, but it is generally acknowledged that even in those societies most committed to this economic system there is some degree of government intervention (Nicholls, Citation2000; Peck, Citation2008). This paper limits the scope of the definition of “laissez-faire” to a hypothetical scenario linked to AVs which is further described in the paragraphs below.
The “laissez-faire” scenario as defined is this paper describes a context in which the production and use of AVs is exclusively driven and led by the private sector at the national, regional and local level. Government’s intervention is limited to enabling a high penetration rate (mass market penetration) for Level 5 automated vehicles. Public authorities also intervene to ensure that conventionally driven vehicles have been gradually phased out for safety reasons. On the one hand, the “laissez-faire” scenario is characterised by the continuation of current transport ownership and use models, as experienced in most Western countries, where surface transport is dominated by cars driven by their owners. It assumes that owners of conventional cars will gradually replace them with AVs. It seems to be the model supported by conventional Original Equipment Manufacturers (OEMs) most of which have started to automate their products. Level 1 driver assistance automated systems, such as adaptive cruise control, are becoming mainstream – they are currently offered on vehicles produced by most OEMs including Jaguar, Range Rover, Mitsubishi and Toyota. As stated by vehicle manufacturer Renault, these Advanced Driver Assistance Systems “serve as a gateway to autonomous vehicles”.Footnote5 National governments, such as the UK, have been supporting this development as it represents a commercial opportunity to foster vehicle production on an industrial scale (Bonneau, Yi, Probst, Pedersen, & Lonkeu, Citation2017; Department for Transport, Citation2015).
On the other hand, it is highly probable that under a “laissez-faire” scenario, shared AVs could become mainstream too. OEMs have an interest in fostering the use of both privately owned and shared AVs. Many have already teamed up with shared mobility companies, for instance General Motors with Lyft and Volvo with Uber; others have announced that they plan to launch a robot taxi service (Muller, Citation2018). The race to unveil fleets of self-driving taxis is likely to be motivated by the need to “gain first-mover advantage in an industry” (Campbell, Citation2017). We envision that shared AVs will become prevalent in dense urban areas and compete with or complement privately used AVs. On-demand shared-useFootnote6 AVs, sometimes called “automated taxi systems” or “automated personal rapid transit” would offer door-to-door services to customers, replacing conventionally driven e-hailing vehicles (e.g. Uber). Under a laissez-faire scenario we assume that shared mobility services are exclusively provided by profit driven private companies, and that the various companies compete for market share. Public authorities allow those companies to operate and compete without restriction.
1.3. Testing the hypothesis: government objectives
In order to test our hypothesis, we require a “yardstick” for each of the themes we have selected: traffic flow and accessibility.
1.3.1. Traffic flow
Traffic flow is very commonly a concern of both national and city governments. Congestion is seen in a wholly negative light and its removal or at least its alleviation as a core task of transport authorities. For example, the UK Department for Transport had as one of the metrics for its single departmental plan “Average delay on strategic roads and average delay on local ‘A’ roads” (Department for Transport, Citation2016). Reducing congestion is also a core objective for EU policies, as highlighted throughout the EU Transport White Paper (European Commission, Citation2011). Our yardstick is that congestion should not increase above present levels.
This paper interrogates the potential impact that the introduction of very safe, fully automated vehicles could have on traffic flow on national, regional and local highways in liberal capitalist market economies. Could AVs optimise transport networks by improving traffic flow and reducing congestion? To what extent could government intervention influence potential outcomes?
1.3.2. Accessibility
Though perhaps slightly less prominent than traffic flow as a public goal in transport, some reference to the relative ease with which people (and goods) are able to reach their destinations is very common. The UK Department for Transport has, for example, “average minimum travel times to key services in England” as a metric against its objective of “Building a One Nation Britain”. The underlying preoccupation is with the distribution of accessibility between the “haves” and “have-nots” and a desire to improve the accessibility of those who most struggle to reach destinations that are important to them. We therefore adopt as our yardstick the criterion that the distribution of accessibility should not widen, i.e. that the gap between the accessibility-rich and accessibility-poor should not grow.
1.4. Structure of the paper
The following section will summarise the methods employed in developing this paper. Then the results section will be divided into three parts: the first will look at the likely long-term consequences of government (non) intervention in relation to traffic flow; the second will focus on accessibility issues; and the third part will look at potential government interventions to anticipate and prevent negative side-effects which could arise with a “laissez-faire” approach. The paper ends with some conclusions and recommendations.
2. Methods
In this section, we explain the sources that have provided initial material for this paper: (i) a literature review; (ii) deliberative workshops with stakeholders.
2.1. Literature review
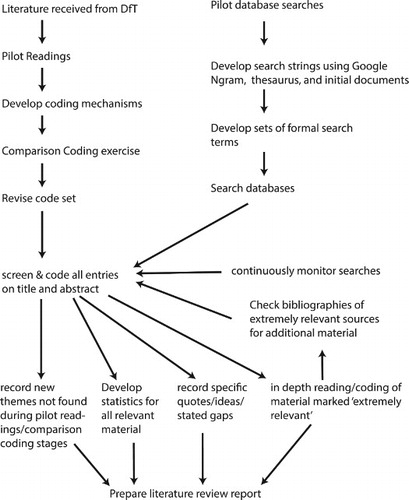
An extensive and methodical literature review was conducted in 2016 and 2017 as part of a project being carried out for the UK Department for Transport (DfT), as further described in Appendix 1. Five leading databases were searched (see Appendix 2) using a broad range of keywords and synonyms related to AVs (see Appendix 3) and the large number of items (more than 50,000) generated was then filtered for relevance. In total, 432 documents were selected – including 181 items of grey literature – to be further analysed using EPPI-Reviewer, a systematic review application (see further details in Appendix 4). The method employed is described in detail in Cavoli et al. (Citation2017). Subsequently, in the context of CREATE, a Horizon 2020 project funded by the European Union, we conducted a further “in-fill” survey, looking specifically for items published since 2017.
2.2. Deliberative workshops
This paper is also informed by deliberative exercises which involved a range of stakeholders in the UK and in France. In the UK, as part of the same project for the DfT in 2016, two workshops were held. Details of these workshops are provided in Cohen, Jones, and Cavoli (Citation2017) and the exercise is discussed more fully in Cohen, Stilgoe, and Cavoli (Citation2018). In addition, two further workshops were organised in 2017 in the context of the CREATE project. One took place in London and was organised in collaboration with the Corporation of the City of London. The second took place in Paris and was organised in collaboration with the Institut d’aménagement et d’urbanisme de la région d’Ile-de-France. All events involved representatives from academia, central and local government, transport operators, NGOs and consultants who had been recruited through an iterative process of targeted invitation and convenience sampling, with the general goal of achieving a diverse audience of stakeholders whose work was relevant to AVs in some way. The majority who attended were working in the field of transport but a small number came from other fields. Attendance at all events was between 30 and 50 individuals. At the workshops that took place as part of the project for the DfT, discussions were recorded and transcribed; at subsequent sessions, detailed notes were taken of the conversations.
The format of the workshops held in the UK involved the discussion of 12 “scenes” (see Appendix 5 for a summary, identifying which scenes relate most closely to the themes of traffic flow and accessibility). These were brief descriptions of a future situation in which AVs had become commonplace and were leading to either unexpected or uncomfortable circumstances. Groups of between five and seven participants first read the scene descriptions and then took part in a moderated discussion in which their reactions to the scenes were debated with the support of a discussion guide.
Notes from those workshops have informed this paper; relevant themes are exemplified using verbatim anonymised quotations from participants.
3. Likely long-term consequences of “laissez-faire” approach by governments
3.1. Traffic flow
If public authorities at the national, regional and local level abstain from interfering in the workings of the AV market and the “Laissez-faire” scenario prevails, what would the long-term consequences be on traffic flow and congestion on highway networks?
This topic remains under-researched and is debated in the literature as the potential impact AVs might have on traffic flow depends on a number of variables such as vehicle size, ownership type, penetration rate and connectivity (Cavoli et al., Citation2017). We tackle this theme by examining the potential impact AVs could have on volume of movement and network efficiency.
This paper posits that in most cases congestion is not induced by road infrastructure capacity (or lack of), but rather by demand management issues (Arnott & Small, Citation1994; Christidis & Ibáñez Rivas, Citation2012).
3.1.1. Transport volume
Should AVs replace conventionally driven vehicles and successfully reach level 5 of automation, these vehicles could become highly popular and lead to an increase in travel demand (Brown, Citation2014; Fox, Citation2016; Guerra, Citation2016). This claim is based on several assumptions. The first is that under highly automated scenarios (Level 4 or 5) “non-drivers” would want to use AVs for their travel. The “non-drivers” group describes part of the population that does not have a driver’s licence or does not drive, such as under-age persons, persons with a disability, or persons who do not feel confident enough to drive (such as the elderly). Smith (Citation2012) estimates that in the USA this section of the population represents more than 30% of citizens.
The second assumption that could explain an increase in travel demand linked to AVs is the potential rise in popularity of AVs as a result of their convenience. AVs have the potential to become very attractive and a growing proportion of the population might rely on their use for travel (Fagnant & Kockelman, Citation2015; Ticoll, Citation2015). As argued by LeVine and Polak: “it may reasonably be surmised that technology that makes it easier to move about by car will serve to stimulate its use” (Le Vine & Polak, Citation2014, p. 8). A similar point was made by a workshop participant: “you know, the haves may well have ten cars, and they will all be on the road all the time, collecting things, so we will have a hellish scenario of total congestion”. AVs could generate a renewed interest in car use and potentially car ownership, and lead to the “renaissance of the private car”, as described by Thomopoulos and Givoni (Citation2015, p. 8).
An increase in travel demand is likely to lead to an increase in vehicle-kilometres travelled (VKT). Estimates based on modelling work indicate that the increase in VKT could be as high as 20% or 35% (Bierstedt et al., Citation2014; Guerra, Citation2016). Even though increased VKT does not automatically mean worsening traffic conditions, several authors argue that it could well generate more congestion and associated negative impacts (Anderson et al., Citation2014; Begg, Citation2014; Smith, Citation2012; Wadud, MacKenzie, & Leiby, Citation2016).
3.1.2. Network efficiency
Vehicle safety improvements brought by automation could reduce bottlenecks linked to road accidents (DiClemente, Mogos, & Wang, Citation2014). In the USA it is estimated that 25% of all traffic jams are caused by road accidents (Federal Highway Administration, Citation2005, p. 6); the positive correlation between road accidents and congestion levels has also been clearly demonstrated in the UK (Wang & Quddus, Citation2009). As stated in the introduction, these safety improvements will only be effective in circumstances where conventionally driven vehicles have been phased out and very safe Level 5 AVs operate on the highway. In a mixed traffic situation – where both AVs and conventionally driven vehicles share the road – safety improvement might be limited and traffic flow could be negatively affected (Atkins, Citation2016; Calvert, Schakel, & van Lint, Citation2017).
Assuming that full automation (Level 5) is reached and that AVs are safe and mainstream (i.e. the vast majority of the vehicles on the roads are AVs), highway capacity could increase thanks to vehicles’ capacity to travel closer to each other and the use of “traffic-smoothing algorithms” and improved braking and acceleration decisions (Fagnant & Kockelman, Citation2015). However, these improvements will depend on AVs’ ability to communicate with each other and with the infrastructure surrounding them. Vehicle connectedness (to other vehicles and to the infrastructure) could lead to significant increases in effective network capacity (ibid.). A laissez-faire scenario with limited government intervention could delay or limit the introduction of AV connectedness as vehicle manufacturers are likely to be reluctant to share data with each other or as a lack of standardisation of protocols hinders the communication process. An analogous difficulty is experienced in the urban freight delivery field where competition between different operators often hinders the optimisation of the whole networks (Atkins, Citation2016).
If AVs are very safe, fully automated, electric, and have exclusive use of the highway, vehicles size could decrease. An overall decrease in vehicle size could contribute to improved traffic flow. As one workshop participant put it: “in a city environment, perhaps where the pods are just being continually used, kind of service economy model, perhaps there’d be less congestion because their continuing use, you do not need to park them anymore”. However, this could be affected by customer choices, as the growing percentage of sports utility vehicle sales in Western countries indicate that large vehicles could remain popular amongst car owners (Archer, Citation2010).
Many claim growing traffic volumes will drown out the effects of predicted increases in network capacity, resulting in increased congestion (Anderson et al., Citation2014; Begg, Citation2014; Brown, Citation2014; Clark et al., Citation2016; Smith, Citation2012; Wadud et al., Citation2016). In their study, de Almeida Correia and van Arem (Citation2016) model a shared AV network in Delft to assess the impact on congestion. They conclude that shared AVs have the potential to increase effective network capacity but could increase congestion slightly if car use increases. Çolak and colleagues warn that even though highly automated and connected AVs could reduce congestion, even “in the best-case scenario, time savings would be imperceptible for the majority of the drivers” (Çolak, Lima, & González, Citation2016, p. 7).
In summary, a “laissez-faire” scenario with limited government intervention is unlikely to lead to improved network conditions as vehicle manufacturers are likely to prioritise customer demands and competitive market penetration. According to Atkins, “as the automotive industry is not charged with the safe and efficient operation of the road network, maximum benefits to the network may not be obtained” (Atkins, Citation2016, p. 46). This outcome would run counter to traffic-flow objectives of governments at national, regional or local levels. In addition, an increase in road traffic and congestion would lead to a range of negative externalities, such as increased emissions and energy consumption or greater physical inactivity, amongst others (Clark et al., Citation2016; Wadud et al., Citation2016). The potential consequences of a “laissez-faire” scenario would therefore undermine the pursuit of a range of pressing social objectives in particular in the environmental, energy and health fields.
3.2. Accessibility
To recap, we have in this paper defined accessibility as the relative ease with which individuals are able to gain access to the locations, goods and experiences that are important to them. We adopt Geurs and van Wee’s (Citation2004) helpful division of this attribute into four components: (i) transport; (ii) land use; (iii) temporal; (iv) individual.
In terms of transport, we could expect access to automated vehicles to reflect wealth, as is currently the case with manually driven cars (Alessandrini, Campagna, Site, Filippi, & Persia, Citation2015; DiClemente et al., Citation2014). Whilst some researchers predict that the cost of using an automated vehicle would fall over time (Bierstedt et al., Citation2014), it would not drop to zero and would not be likely to be within the reach of all members of society (Milakis, Kroesen, & van Wee, Citation2018; Thomopoulos & Givoni, Citation2015). So a segment of any population would continue to rely on walking, cycling or collective transport (subject to its affordability) to make their journeys. Holding other aspects of accessibility constant for now, this may not constitute a major change from the status quo, in that those who have access to manually-driven cars typically enjoy advantages over those who do not (Cohen & Shrewsbury, CitationForthcoming), in terms of speed and directness of travel.
The issue of land-use impacts is essentially one of sprawl. If the generalised cost and convenience of moving falls significantly, people will be likely to locate themselves further from centres in order to enjoy greater space (Brown, Citation2014), resulting in lower-density development (Anderson et al., Citation2014; Bansal, Kockelman, & Singh, Citation2016; Frisoni et al., Citation2016; Milakis et al., Citation2018). For the AV user, this would not mean a material reduction in accessibility: the longer journey time would be balanced by the lower disutility of travel per unit time. As for the non-user, accessibility impacts would depend on whether the locations of services and activities responded to individuals’ location decisions. There is little research on this to date. Zakharenko (Citation2016) argues that services will be centralised but it is also plausible that they would disperse as businesses competed with each other through proximity to their customers. If this happened, the non-user would experience a reduction in accessibility in having to travel further than at present to reach valued destinations.
The temporal component of accessibility reflects “the availability of opportunities at different times of the day, and the time available for individuals to participate in certain activities” (Geurs & van Wee, Citation2004, p. 128). By some accounts, accessibility should be measured using “generalised cost” which reflects amongst other things the disutility of travel time rather than simply the period elapsed. If time previously spent at the wheel were liberated by using an AV, this would imply a reduction in journey “cost” as travel time was reallocated to other, productive or enjoyable activities, (though the capacity to spend time in AVs productively is disputed (Cyganski, Fraedrich, & Lenz, Citation2015)). Those using AVs would as a consequence experience an increase in accessibility. Meanwhile, over the longer term, the timing of availability of activities might spread as a larger proportion of the population had the means to travel “at will” (see next paragraph), with negative consequences for those relying on transport running to a timetable.
The final category of Geur and van Wee’s representation of accessibility is the individual. Level-5 automated vehicles could be expected to extend the level of accessibility enjoyed by today’s car drivers to those who could not or did not wish to drive but who could afford use of an AV. This includes people of pre- or post-driving age (Fagnant & Kockelman, Citation2015; Ticoll, Citation2015), those with disabilities that prevent driving (Anderson et al., Citation2014; Begg, Citation2014; Bohm & Häger, Citation2015; Harper, Hendrickson, Mangones, & Samaras, Citation2016), those who are intoxicated and those who simply would rather not drive. Such individuals would normally have to rely on taxis or collective transport but, were AVs materially cheaper, their journey-making would likely become more frequent as a result (Bierstedt et al., Citation2014; Brown, Citation2014; Fagnant & Kockelman, Citation2015; Fox, Citation2016; Guerra, Citation2016; Le Vine & Polak, Citation2014; Papa & Ferreira, Citation2018). The consequence of this development would be to narrow the group relying on walking, cycling or public transport and put public transport at risk of becoming unviable because of insufficient demand. And, in the long term, widespread adoption of AVs that protected their owners over others (Bonnefon, Shariff, & Rahwan, Citation2016) could create an increasingly hostile environment for those attempting to travel by other means, particularly walking and cycling.
To summarise, the impacts of a laissez-faire approach by governments to AVs on accessibility will be neutral at best but there are good grounds to expect increased inequalities, worsening the circumstances of those who enjoy least accessibility in both relative and absolute terms (Papa & Ferreira, Citation2018). This was captured well by a participant in one of our workshops:
I could very easily see a situation in which we get the regulatory framework for AVs wrong, that we’re too laissez-faire, too deregulatory about it and effectively that the vulnerable parties … the older, non-tech savvy people are unable to access the benefits and that the 16 to 25 demographic is priced out of being able to access it and it in effect becomes a luxury urban transport for yuppies.
4. Intervention options and possible impacts
4.1. Categories of intervention
To structure our discussion of possible interventions, we draw upon the categorisations offered by Banister et al. (Citation2000), Wittneben, Bongardt, Dalkmann, Sterk, and Baatz (Citation2009) and KonSULT (Citation2016). Though the three have much in common, each has a distinct focus so we have derived a hybrid set of categories as follows: (i) planning/land-use; (ii) regulation/policy; (iii) infrastructure/technology; (iv) service provision; (v) economic instruments.
In doing this, we have dispensed with the category of lifestyle/information/soft interventions, not because we do not think them relevant but because it is too early to discuss their potential application and impact given the focus of this paper on the longer term. We would expect such interventions to be employed alongside those that we list above and to be planned on a shorter timescale.
4.2. Options
We now discuss some of the options available to governments, using the five categories of intervention introduced above, with the government priorities of traffic flow and accessibility in mind. A list of potential interventions is provided in . We do not claim that the following discussion is exhaustive, but it provides a flavour of the range of action available to authorities.
Table 1. Applicability of interventions.
The use of planning instruments could promote shorter journeys and address sprawl as discussed above. Planning authorities can use zoning to ensure that certain areas are not built on and can require that development in a given location achieve a minimum density and contain specific facilities. In addition, planning authorities can use zoning overlays, density and zoning bonuses and planning funding as tools to guide development in certain directions, such as by promoting transit-oriented development. But such tools are used largely to regulate built-up areas and we have raised the possibility that people might move arbitrarily far from cities, perhaps choosing to live in rural areas. This suggests a greater role for planning interventions at the city-region level than has been familiar to date.
Public authorities also have the capacity to plan new links dedicated to types of transport that are most space-efficient or that benefit those with the poorest accessibility, being coincidentally the various forms of sustainable transport (e.g. bus, tram, metro). In this set could be both conventional public transport and automated public transport. Collaborations between public authorities and collective transport providers could ensure that the most sustainable, efficient and inclusive modes of privately operated transport are being prioritised (for instance automated on-demand minibuses) and adequately complement “mainstream” public transport.
The numerous regulatory and policy measures available vary in the extent to which they depart from established practice – the prohibition, for instance, of privately owned AVs could be very effective in preventing increased congestion or inequality of accessibility but it seems unlikely to be feasible in the countries that are the focus of this paper. We therefore concentrate on regulation that does not constitute such a major departure from standard practice in Western democracies. Authorities could ban empty running of AVs (Zhang, Guhathakurta, Fang, & Zhang, Citation2015) or provide preferential facilities to AVs with high occupancy (Milakis, van Arem, & van Wee, Citation2017); they could introduce parking regulations that inhibited private ownership by limiting greatly the scope for vehicles to be stored other than at their owners’ properties, combining this with a ban on empty running. They could alternatively promote so-called “first/last mile” use of AVs (Clark et al., Citation2016; Fraedrich, Beiker, & Lenz, Citation2015; Ticoll, Citation2015): here, it is envisaged that AV users will travel for the bulk of their journeys in high-capacity collective transport, with AVs providing a link between travellers’ journey end points and transit access/egress points. Regulations designed to support first/last mile operations could include the next generation of “park and ride”– the designation of generous AV waiting areas at transport nodes; if employed in combination with regulations designed to discourage waiting areas elsewhere, this could make the first/last mile option attractive relative to “door-to-door” AV journeys which may involve a greater waiting time on the user’s part. To protect the viability of public transport, authorities could require employers and public services to locate their activities in places that are well served by it; they could also insist on operating hours compatible with access by public transport. And regulation could also serve to protect directly the interests of non-users by governing the behaviour of AVs in mixed traffic situations (Luetge, Citation2017). For example, if there was a presumption in favour of vulnerable road users in situations of conflict (even if at the cost of the AV occupant), this could help to make travel by active modes more attractive.
Regulations and policies prioritising collective or shared AVs could include commonly used measures to discourage single-occupancy car use, such as high-occupancy vehicle lanes, or innovative incentives supporting collective or shared mobility through Mobility as a Service packages for instance. These are some examples of demand management strategies that would have to be implemented at an early stage (Fagnant & Kockelman, Citation2015; Smith, Citation2012). In urban areas, regulations and policies fostering the use of shared AVs would have to ensure that they complemented, and did not compete with, mass transit.
The obvious way in which authorities might respond through infrastructure/technology to AVs’ potentially negative effects on traffic flow and/or accessibility would be by providing or augmenting high-quality collective transport systems which might be expected to compete effectively with AVs (on the assumption that such systems would be made affordable to use). They could reduce the parking stock and also continue the established practice of providing facilities dedicated to walking and cycling. They may equally wish to configure the operation of traffic signals to favour certain social groups (Mladenovic & McPherson, Citation2016).
Public authorities could foster and support the use of Vehicle to Vehicle (V2V) and Vehicle to Infrastructure (V2I) communication in order to secure the network capacity improvements discussed above. According to Fagnant and Kockelman, for ideal results, the “implementation of cloud-based systems and city or region-wide coordinated vehicle-routing paradigms and protocols” should be in place (Citation2015, p. 170).
With respect to service provision, authorities could increase the density and frequency of public transport both so as to provide a competitive alternative to private motorised transport and to ensure a reasonable level of service for those with the poorest accessibility. Alongside this or as an alternative, they may procure fleets of AVs that would be made available specifically to those with low accessibility.
Finally, economic instruments provide a promising set of possible ways to influence trip-making and mode choice. Most obviously, road pricing in its various forms could be used to discourage travel by private motorised modes (including AVs) and to make other forms of transport relatively attractive. Smart pricing (Greater London Assembly Transport Committee, Citation2017; Zmud, Goodin, Moran, Kalra, & Thorn, Citation2017) could be used not simply to deter AV use or to promote high vehicle occupancy in cases where AVs are used but to promote its use for first/last mile operation, thereby supporting patronage for and protecting the viability of collective transport. Alternatives/complements to road pricing include parking levies, fuel/energy taxes and purchase taxes.
Whilst all of the aforementioned could be employed to deter AV use that could be expected to lead to congestion or increased disparities of accessibility, authorities could equally use resources to support collective transport and/or bring AV use within the reach of those who would otherwise be excluded from using them. This could be achieved through subsidised fares on collective transport (automated or conventionally driven), subsidy of AV purchase or “free miles” for target users.
4.3. Applicability of interventions
In below, we briefly assess which of the measures described above appears applicable in the context of traffic flow and accessibility. What is immediately obvious is that the vast majority of interventions identified could apply to both. This is not surprising, in that network conditions can be expected to influence accessibility in the long term. The exceptions to this trend are targeted measures intended to increase the accessibility of priority groups – these would not be expected to improve traffic flow; in fact, if they had any effect, it may be slightly negative.
4.4. Possible consequences of intervention
Would some combination of the interventions listed above enable a given authority to meet its traffic-flow and accessibility objectives in a world of Level-5 automated vehicles? Whilst it is too early to answer with certainty, this is definitely an extensive and potent array of measures. Many of them are in use in some form already and are proving effective tools in a “manually driven” world. It is therefore plausible to claim that applying a selection of these interventions could be expected to produce outcomes closer to the authority’s vision than would obtain in the laissez-faire scenario we have explored.
The crucial issue is the extent to which these interventions might be employed, because their impacts will be a function of the intensity of their application. Smart road pricing is not a panacea; its effectiveness will depend on the prices set. These and associated details will in turn depend on stakeholder opinions and political will. And this brings us back to general attitudes to automated vehicles, to which we turn in our conclusions.
5. Conclusions and recommendations
Our comparison of laissez-faire with a more interventionist approach to managing AVs in the areas of traffic flow and accessibility has led us to accept our initial hypothesis: that the latter path has the potential to lead to more socially desirable outcomes. We feel justified in suggesting that what is true of these two areas is very likely true of other aspects of transport, and have offered some evidence of this (environment, energy, health) as part of our analysis. Of the few that have addressed this topic, Anderson et al. notably drew a similar conclusion: “relying strictly on the free market may not maximise social welfare and could even lead to market failure” (Citation2014, p. 4).
5.1. To act now?
But it is one thing to say that laissez-faire may prove unwise and quite another to tell authorities to start taking action immediately, when so much remains unknown about this technology and its trajectory. On this front, several authors urge caution. Anderson et al. advises us to “avoid moving too quickly to regulate this technology without better information about its benefits and costs” and to support further research (Citation2014, p. 4). Others make similar claims (Bohm & Häger, Citation2015; Kockelman et al., Citation2016). Fox argues that regulators in the USA should assess the “cumulative impact” of AV use before legislating as a number of negative side effects linked to AV uptake might need to be anticipated (Citation2016, p. 22). Or, in Bohm and Häger’s view, before commercialising highly automated vehicles, it is important to undertake further research to better understand “what influences the AVs will have” (Citation2015, p. 38). Fewer voices call for more immediate action, notable amongst them Begg (Citation2014).
5.2. How to act?
This paper can be read as the contraposition of technological optimism and anticipatory governance (Guston, Citation2014). That is, a laissez-faire approach could be expected of administrations that thought that the market should be left to deal with the adoption of AVs; it may equally be seen in authorities that feel powerless to influence the development path of AVs. In contrast, anticipatory governance is founded on an active engagement with the development of technology: “responsible development becomes, at least in part, understanding the role of one’s own decisions and one’s own position in the innovation process” (Guston, Citation2014, p. 232). And discussion of anticipatory governance is grounded in the explicit acceptance that a great deal remains unknown about the emerging technology but that this is not a sound argument for doing nothing.
Anticipatory governance has arisen as a concept specifically because of the number of new and powerful technologies that have emerged in recent decades. Automated vehicles are decidedly not the first technology that appears to offer both benefits and real risks. As to how public bodies should act, it is helpful here to emphasise the distinction between anticipatory governance and precautionary governance (which is founded on the avoidance of risk). Avoiding risks is often justified but its consequences will likely include missing out on the benefits a technology offers. In reaching our (tentative) conclusion that intervention can lead to more desirable outcomes than will a laissez-faire approach to government, we are at the same time inviting public bodies to acknowledge their capacity to influence the development process and to create a context in which a positive balance is achieved between the advantages and disadvantages of AVs.
In a situation of great uncertainty, there are practical tools that can help authorities to decide on ways forward. They can carry out high-level appraisal of a range of intervention options (as recommended by Cohen et al. (Citation2017)). Whilst not definitive, this will at least open the way to taking action. It can be usefully done against a number of future scenarios in order to establish whether there are actions that seem relevant in multiple scenarios. Scenarios involving AVs are becoming more plentiful (e.g. Milakis, Snelder, van Arem, van Wee, & Homem de Almeida Correia, Citation2017), though they have some way to go (Cohen et al., Citation2017). Nevertheless, appraising action against multiple futures (even if they are flawed) will tell the policy maker more than either not carrying out appraisal or appraising options against a single forecast future.
Clearly, intervention, rather than laissez-faire, is not easy. On the contrary, laissez-faire has the significant selling point that it frees authorities from having to justify interventionist policies. And we have set as the context for this paper western capitalist democracies, whose policies will typically have a less interventionist character (compared to socialist states for instance), so authorities would tend to be wary of introducing policies that might be characterised as constraining freedom in any way. Habit will also stand in the way: government tends to exhibit path dependence (Howlett, Citation2009). But laissez-faire brings the considerable risk of backlash if it does not deliver the outcomes stakeholders seek, for example if traffic conditions should worsen rather than improve. In other words, authorities need to appreciate that inaction is a form of action.
5.3. Outstanding questions
This paper has offered a reasoned argument to support the claim that laissez-faire would be a suboptimal strategy where AVs are concerned. But it leaves a variety of questions unanswered. For example, what package of interventions might offer authorities the best chance of managing AVs for public good? And we remain unsure whether even a “well managed” transition to a world in which highly automated vehicles were prevalent could have unwelcome side effects, such as a significant drop in active travel. Whether this supports the conclusion that authorities would do better to prevent the arrival of AVs altogether is the subject for a separate inquiry.
Another policy route consists of taking deliberate action to guide the development and implementation of self-driving technology towards desired policy and societal objectives. This is more likely to prevent unwanted consequences associated with AV take-up, such as increased car use. As Howard and Dai conclude: “How we choose to implement this technology will make the difference, and that largely depends on the views of political and market actors” (Citation2013, p. 17).
A specific area for additional research is in “policy innovation”. As our discussion of interventions showed, governments already have many of the tools to manage the AV transition but additional tools will be needed. We identified above regional land-use planning measures to control the sort of long-distance sprawl that could result from AV take-up; authorities will also need mechanisms for governing the conduct of AVs in general, and in particular the interactions of AVs with vulnerable road users.
5.4. A final word
This paper sets out a case for government at all levels, far from being passive, to engage actively in managing the emergence of AVs in order to arrive at socially desirable outcomes. An essential part of this is careful consideration of the range of options open to authorities in terms of governing this technology. This is perhaps best characterised as transition management which, in Loorbach’s words, takes into account “the need for a long-term perspective to guide short-term development, the acknowledgment of uncertainties and surprise, the importance of networks and self-steering, and the necessity of creating space for innovation” (Loorbach, Citation2010, p. 178).
Our investigation indicates that authorities can have very considerable influence over the effects of AVs and have “a key opportunity to direct the future of transportation outcomes” (Maia & Meyboom, Citation2018, p. 220). Their challenge is to find the delicate balance between fostering innovation and ensuring that it leads to common well-being and prosperity. The question to be asked next is whether the typical regulatory authority will grasp that opportunity.
Acknowledgements
This paper derives partly from work carried out for the UK Department for Transport on social and behavioural questions relating to automated vehicles (Cohen et al., Citation2017). It additionally reflects work done as part of CREATE project, which has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 636573. The authors thank these organisations for their willingness to allow the content to be shared. They also thank Professor Peter Jones for helpful comments and technical advice and two anonymous reviewers for their constructive remarks.
Any errors are the responsibility of the authors themselves.
Whilst this paper arises from work carried out for the UK Department for Transport and as part of a project funded by the European Commission, the views reported are those of the authors alone.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
Notes
1. SAE International categorises Level 4 as “High automation” where the vehicle undertakes the vast majority of the driving tasks and Level 5 “full automation” where the vehicle drives itself without human intervention (SAE International, Citation2016).
2. “SAE International, initially established as the Society of Automotive Engineers, is a U.S.-based, globally active professional association and standards developing organisation for engineering professionals in various industries.” Wikipedia.
3. “An economic system in which goods and services are made, sold, and shared and prices set by the balance of supply and demand” Source: Cambridge Dictionary, https://dictionary.cambridge.org/dictionary/english/market-economy
4. Oxford dictionary. Source: https://en.oxforddictionaries.com/definition/us/laissez-faire
5. Groupe Renault international website: https://group.renault.com/en/innovation-2/autonomous-vehicle/
6. In this paper, a “shared-use AV” is used by multiple user groups, either in the form of a taxi (one user group at a time) or small bus (“ride-sharing” amongst more than one user group). Shared-use AVs may be owned by businesses, public bodies or individuals who lease them out some or all of the time.
References
- Alessandrini, A., Campagna, A., Site, P. D., Filippi, F., & Persia, L. (2015). Automated vehicles and the rethinking of mobility and cities. Transportation Research Procedia, SIDT Scientific Seminar 2013, 5, 145–160. doi: 10.1016/j.trpro.2015.01.002
- Anderson, P. M., Kalra, N., Sorensen, P., Samaras, C., & Oluwatola, O. A. (2014). Autonomous vehicle technology: How to best realize its social benefits.
- Anderson, J. M., Kalra, N., Stanley, K. D., Sorensen, P., Samaras, C., & Oluwatola, O. A. (2014). Autonomous vehicle technology: A guide for policymakers. Santa Monica, CA: RAND Corporation.
- Archer, G. (2010). Rise in UK car CO2 emissions largely a result of increasing SUV sales, not declining diesel | transport & environment [WWW Document]. Transport and Environment. Retrieved from https://www.transportenvironment.org/newsroom/blog/rise-uk-car-co2-emissions-largely-result-increasing-suv-sales-not-declining-diesel
- Arnott, R., & Small, K. (1994). The economics of traffic congestion. American Scientist, 82, 446–455.
- Atkins. (2016). Research on the impacts of connected and autonomous vehicles on traffic flow: summary report. © Atkins Ltd.
- Atkinson, M. M., & Coleman, W. D. (1992). Policy networks, policy communities and the problems of governance. Governance, 5, 154–180. doi: 10.1111/j.1468-0491.1992.tb00034.x
- Banister, D., Stead, D., Steen, P., Akerman, J., Dreborg, K., Nijkamp, P., & Schleicher-Tappeser, R. (2000). European transport policy and sustainable mobility. London; New York: Spon Press.
- Bansal, P., Kockelman, K. M., & Singh, A. (2016). Assessing public opinions of and interest in new vehicle technologies: An Austin perspective. Transportation Research Part C: Emerging Technologies, 67, 1–14. doi: 10.1016/j.trc.2016.01.019
- Begg, D. (2014). A 2050 vision for London: What are the implications of driverless transport. London: Transport Times.
- Bierstedt, J., Gooze, A., Gray, C., Peterman, J., Raykin, L., & Walters, J. (2014). Effects of next-generation vehicles on travel demand and highway capacity, FP think. Washington, DC: Fehr & Peers.
- Bohm, F., & Häger, K. (2015). Introduction of autonomous vehicles in the Swedish traffic system: Effects and changes due to the new self-driving car technology. Uppsala: Uppsala Universitet.
- Bonneau, V., Yi, H., Probst, L., Pedersen, B., & Lonkeu, O. (2017). Autonomous cars: A big opportunity for European industry. Brussels: European Commission.
- Bonnefon, J.-F., Shariff, A., & Rahwan, I. (2016). The social dilemma of autonomous vehicles. Science, 352, 1573–1576. doi: 10.1126/science.aaf2654
- Brown, P.-M. (2014). Autonomous vehicles: A thought leadership review of how the UK can achieve a fully autonomous future. Stevenage: The Institution of Engineering and Technology.
- Calvert, S. C., Schakel, W. J., & van Lint, C. J. W. (2017). Will automated vehicles negatively impact traffic flow? Journal of Advanced Transportation, 2017(1), 1–17. doi: 10.1155/2017/3082781
- Campbell, P. (2017). General motors aims to run fleets of self-driving taxis by 2019. London: Financial Times.
- Cavoli, C., Phillips, B., Cohen, T., & Jones, P. (2017). Social and behavioural questions associated with automated vehicles. A literature review. London: Department for Transport.
- Chan, C.-Y. (2017). Advancements, prospects, and impacts of automated driving systems. International journal of transportation science and technology. Safer Road Infrastructure and Operation Management, 6, 208–216. doi: 10.1016/j.ijtst.2017.07.008
- Christidis, P., & Ibáñez Rivas, J. (2012). Measuring road congestion. Sevilla: European Commission, Joint Research Centre. doi:10.2791/15282
- Clark, B., Parkhurst, G., & Ricci, M. (2016). The potential impact of autonomous vehicles on transport systems and society: A review and future prospects. Presented at the 48th universities’ transport studies group conference, 48th universities’ transport studies group conference, Bristol, UK.
- Cohen, T., Jones, P., & Cavoli, C. (2017). Social and behavioural questions associated with automated vehicles. Scoping study by UCL Transport Institute (Final report). London: Department for Transport.
- Cohen, T., & Shrewsbury, J. (Forthcoming). A novel metric for responding to transport inequality.
- Cohen, T., Stilgoe, J., & Cavoli, C. (2018). Reframing the governance of automotive automation: Insights from UK stakeholder workshops. Journal of Responsible Innovation, 5, 1–23. doi: 10.1080/23299460.2018.1495030
- Çolak, S., Lima, A., & González, M. C. (2016). Understanding congested travel in urban areas. Nature Communications, 7, Article no 10793. doi: 10.1038/ncomms10793
- Cyganski, R., Fraedrich, E., & Lenz, B. (2015). Travel-time valuation for automated driving: A use-case-driven study. Presented at the transportation research board 94th annual meetingtransportation research board.
- de Almeida Correia, G. H., & van Arem, B. (2016). Solving the user optimum privately owned automated vehicles assignment problem (UO-POAVAP): A model to explore the impacts of self-driving vehicles on urban mobility. Transportation Research Part B: Methodological, 87, 64–88. doi: 10.1016/j.trb.2016.03.002
- Department for Transport. (2015). The pathway to driverless cars summary report and action plan.
- Department for Transport. (2016). Dft single departmental plan: Summary of the metrics used, how frequently the metric will be updated and its source. London: Department for Transport.
- DiClemente, J., Mogos, S., & Wang, R. (2014). Autonomous car policy report 2014. Carnegie Mellon University new technology commercialization project class, Pittsburgh.
- Enoch, M. (2015). How a rapid modal convergence into a universal automated taxi service could be the future for local passenger transport. Technology Analysis & Strategic Management, 27(8), 910–924. doi: 10.1080/09537325.2015.1024646
- Esping-Andersen, G. (1990). The three worlds of welfare capitalism / Gøsta Esping-Andersen. Cambridge: Polity Press.
- European Commission. (2011). White Paper: Roadmap to a Single European Transport Area – Towards a competitive and resource efficient transport system.
- Fagnant, D. J., & Kockelman, K. (2015). Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transportation Research Part A: Policy and Practice, 77, 167–181. doi: 10.1016/j.tra.2015.04.003
- Federal Highway Administration. (2005). Traffic congestion and reliability: Linking solutions to problems. Washington, DC: Federal Highway Administration.
- Fox, S. J. (2016). Planning for density in a driverless world. Georgetown: Georgetown University Law Center.
- Fraedrich, E., Beiker, S., & Lenz, B. (2015). Transition pathways to fully automated driving and its implications for the sociotechnical system of automobility. European Journal of Futures Research, 3, 91. doi: 10.1007/s40309-015-0067-8
- Frisoni, R., Dall’Oglio, A., Nelson, C., Long, J., Vollath, C., Ranghetti, D., & McMinimy, S. (2016). Self-Piloted cars: the future of road transport? Steer Davies Gleave & European Parliament, committee on transport and tourism.
- Geurs, K. T., & van Wee, B. (2004). Accessibility evaluation of land-use and transport strategies: Review and research directions. Journal of Transport Geography, 12, 127–140. doi: 10.1016/j.jtrangeo.2003.10.005
- Greater London Assembly Transport Committee. (2017). London stalling. Reducing traffic congestion in London. London: Greater London Authority.
- Guerra, E. (2016). Planning for cars that drive themselves: Metropolitan planning organizations, regional transportation plans, and autonomous vehicles. Journal of Planning Education and Research, 36, 210–224. doi: 10.1177/0739456X15613591
- Guston, D. H. (2014). Understanding ‘anticipatory governance’. Social Studies of Science, 44, 218–242. doi: 10.1177/0306312713508669
- Hancock, P. (2018). Are autonomous cars really safer than human drivers? [WWW Document]. The Conversation. Retrieved from http://theconversation.com/are-autonomous-cars-really-safer-than-human-drivers-90202
- Harper, C. D., Hendrickson, C. T., Mangones, S., & Samaras, C. (2016). Estimating potential increases in travel with autonomous vehicles for the non-driving, elderly and people with travel-restrictive medical conditions. Transportation Research Part C: Emerging Technologies, 72, 1–9. doi: 10.1016/j.trc.2016.09.003
- Hooghe, L. (2001). Multi-level governance and European integration (1st ed.). Lanham, MD: Rowman & Littlefield Publishers.
- Howard, D., & Dai, D. (2013). Public perceptions of self-driving cars: the case of Berkeley, California. In: 93rd annual meeting of the transportation research board, Washington DC, USA, 12–16 January 2014.
- Howlett, M. (2009). Governance modes, policy regimes and operational plans: A multi-level nested model of policy instrument choice and policy design. Policy Sciences, 42, 73–89. doi: 10.1007/s11077-009-9079-1
- ITF. (2015). Automated and autonomous driving. Regulation under uncertainty. Paris: International Transport Forum, OECD.
- Kockelman, K., Avery, P., Bansal, P., Boyles, S. D., Bujanovic, P., Choudhary, T., … Stewart, D. (2016). Implications of connected and automated vehicles on the safety and operations of roadway networks: A final report.
- KonSULT. (2016). Policy Guidebook [WWW Document]. Retrieved from http://www.konsult.leeds.ac.uk/pg/
- KPMG International. (2018). Autonomous vehicles readiness index.
- Le Vine, S., & Polak, J. (2014). Automated cars: A smooth ride ahead? (No. Number Five), ITC Occasional Papers London: Independent Transport Commission.
- Loorbach, D. (2010). Transition management for sustainable development: A prescriptive, complexity-based governance framework. Governance, 23, 161–183. doi: 10.1111/j.1468-0491.2009.01471.x
- Luetge, C. (2017). The German ethics code for automated and connected driving. Philosophy & Technology, 30, 547–558. doi: 10.1007/s13347-017-0284-0
- Maia, S. C., & Meyboom, A. (2018). Understanding the effects of autonomous vehicles on urban form. In G. Meyer & S. Beiker (Eds.), Road vehicle automation 4, lecture notes in mobility (pp. 201–221). Cham: Springer. doi: 10.1007/978-3-319-60934-8_17
- Milakis, D., Kroesen, M., & van Wee, B. (2018). Implications of automated vehicles for accessibility and location choices: Evidence from an expert-based experiment. Journal of Transport Geography, 68, 142–148. doi: 10.1016/j.jtrangeo.2018.03.010
- Milakis, D., Snelder, M., van Arem, B., van Wee, G. P., & Homem de Almeida Correia, G. (2017). Development and transport implications of automated vehicles in the Netherlands: Scenarios for 2030 and 2050. European Journal of Transport and Infrastructure Research, 17, 63–85.
- Milakis, D., van Arem, B., & van Wee, B. (2017). Policy and society related implications of automated driving: A review of literature and directions for future research. Journal of Intelligent Transportation Systems, 21, 324–348. doi: 10.1080/15472450.2017.1291351
- Mladenovic, M. N., & McPherson, T. (2016). Engineering social justice into traffic control for self-driving vehicles? Science and Engineering Ethics, 22, 1131–1149. doi: 10.1007/s11948-015-9690-9
- Muller, J. (2018). Look, Ma, No Steering Wheel Or Pedals In GM’s Robo-Taxi, Coming In 2019. Forbes.
- Nicholls, A. J. (2000). Freedom with responsibility: The social market economy in Germany 1918-1963. Oxford, New York: Oxford University Press.
- Papa, E., & Ferreira, A. (2018). Sustainable accessibility and the implementation of automated vehicles: Identifying critical decisions. Urban Science, 2, 5. doi: 10.3390/urbansci2010005
- Peck, J. (2008). Remaking laissez-faire. Progress in Human Geography, 32, 3–43. doi: 10.1177/0309132507084816
- SAE International. (2016). Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles. Warrendale, PA: SAE international.
- Simons, H. (1948). Economic policy for a free society. Chicago, IL: University of Chicago Press.
- Smith, B. W. (2012). Managing autonomous transportation demand. Santa Clara Law Review, 52(4), 1401–1422.
- Stilgoe, J. (2018). Machine learning, social learning and the governance of self-driving cars. Social Studies of Science, 48(1), 25–56. doi: 10.1177/0306312717741687
- Thomopoulos, N., & Givoni, M. (2015). The autonomous car—a blessing or a curse for the future of low carbon mobility? An exploration of likely vs. Desirable outcomes. European Journal of Futures Research, 3, 31. doi: 10.1007/s40309-015-0071-z
- Ticoll, D. (2015). Driving changes: Automated vehicles in toronto. Toronto: University of Toronto.
- Vojnovic, I. (2003). Laissez-faire governance and the archetype Laissez-faire city in the USA: Exploring Houston. Geografiska Annaler: Series B, Human Geography, 85, 19–38. doi: 10.1111/1468-0467.00128
- Wadud, Z., MacKenzie, D., & Leiby, P. (2016). Help or hindrance? The travel, energy and carbon impact of highly automated vehicles. Transportation Research Part A: Policy and Practice, 86, 1–18.
- Wagner, J., Baker, T., Goodin, G., & Maddox, J. (2014). Automated vehicles: Policy implications scoping study.
- Wang, C., & Quddus, M. (2009). Impact of traffic congestion on road accidents: A spatial analysis of the M25 motorway in England. Accident Analysis & Prevention, 41(4), 798–808. doi: 10.1016/j.aap.2009.04.002
- Wittneben, B., Bongardt, D., Dalkmann, H., Sterk, W., & Baatz, C. (2009). Integrating sustainable transport measures into the clean development mechanism. Transport Reviews, 29, 91–113. doi: 10.1080/01441640802133494
- Zakharenko, R. (2016). Self-driving cars will change cities. Regional Science and Urban Economics, 61, 26–37. doi: 10.1016/j.regsciurbeco.2016.09.003
- Zhang, W., Guhathakurta, S., Fang, J., & Zhang, G. (2015). Exploring the impact of shared autonomous vehicles on urban parking demand: An agent-based simulation approach. Sustainable Cities and Society, 19, 34–45. doi: 10.1016/j.scs.2015.07.006
- Zmud, J., Goodin, G., Moran, M., Kalra, N., & Thorn, E. (2017). Advancing automated and connected vehicles: Policy and planning strategies for state and local transportation agencies. doi: 10.17226/24872
Appendices
Appendix 2: literature review: bibliographic databases used
Table taken from Cavoli et al. (Citation2017).
Appendix 3: literature review: keywords and additional synonyms
Table taken from Cavoli et al. (Citation2017).
Appendix 4: literature review: results from bibliographic databases search
Table taken from Cavoli et al. (Citation2017).
Appendix 5: scene summaries
Those scenes most relevant to the theme of traffic flow are E, H and J; those most relevant to the theme of accessibility are A, B and F.
A: a clash of ideas
Controversy surrounds a brewery’s offer of a free (autonomous) ride home for any customer spending more than £30 in one of its pubs. Various public health organisations object on the grounds that this will increase problem drinking; the brewery responds that, in rural areas, pubs often provide the only social outlet but have been closing as drink-driving enforcement has increased. The autonomous ride is nothing new, it argues, since pubs are all doing deals with taxi firms.
B: of youth and age
The National Pensioners’ Foundation produces evidence showing that widespread adoption of driverless car technologies would prevent social isolation in older people and calls for the government to subsidise rides in the new driverless Urban Transit cars for the elderly. This elicits a mixed response.
C: what’s my job worth?
A delivery driver’s frustration at how tedious his working life has become strikes a chord with other listeners of a local radio phone-in. He complains that he spends half his life sitting doing nothing between drops and fears that, once a robot can knock on doors, he’ll be out of a job for good. Other listeners express sympathy – “it’s not really a job is it?”
D: zero day
A recent release of firmware on a line of AVs has been found to be vulnerable after hackers disseminate compromising information concerning the location of a prominent celebrity’s vehicle, fuelling speculation about her love life. The celebrity is suing the manufacturer for invasion of privacy. The manufacturer is currently saying no more than that it takes breaches of its customers’ privacy very seriously and that it is investigating.
E: it should never have happened
Thirteen-year old Peter Leicester was knocked down by an autonomous vehicle (operating in full self-driving mode) in Surbiton, south London. It is suggested that Peter and his friends had been playing “chicken”, forcing vehicles to make emergency stops. This is the first UK case of hospitalisation following a collision involving an AV and Peter’s condition is stable. The police are investigating and are in touch with the vehicle’s manufacturer.
F: trunk road conversion
The Planning Inspectorate is hearing an application under the Town and Country Planning Act for a section of the A3 to be converted to exclusive used by AVs conforming to ISO93241. The promoter wishes to enable 180km/h operation on the segregated road, implying 2m barriers, conversion of major junctions to “gated” status, closure of minor junctions etc. Today: oral representations from Surrey County Council, Guildford Borough Council and Dream Vehicles (whose “family vans” are designed in accordance with ISO93226).
G: automated mugging
Criminals have been taking advantage of AVs’ programming to carry out car-jackings and muggings. They surround vehicles which automatically stop, then smash windows, threaten occupants etc. Passengers have complained that the humiliation of being robbed is compounded when the vehicles detect damage and go into a “complete stop” mode.
Following a series of high-profile incidents in wealthy, low-density areas at night, the Transport Select Committee has announced an inquiry on personal security and autonomous vehicles.
H: commuters welcome the 25+ hour day
Car-commuters who have converted to AV are reporting significant benefits from the change. They arrive at their destination less tired and stressed and are using the journey time productively, be that in carrying out personal admin, spending more “virtual” time with their families, or getting on with their work. Certain companies are responding to the last of these by counting AV travel time as part of the working day (if evidence of labour is provided).
I: mayor “robustly confronted”
In response to the predicted increase in AV use, largely as taxis, Borchester Borough Council has removed most of its off-street parking. This provokes a strong reaction from the Borchester AV Owners Society whose objections include retailer concerns about losing trade from visitors and rural residents and harm to the vehicle manufacturing industry. In addition, pedestrian/ cycling groups do not welcome a predicted increase in overall traffic.
J: emergency meeting called by minister
The Daily Mail, through an FOI request, has learnt that cities pioneering AVs have seen a rise in delays to emergency vehicles, resulting from vehicles behaving inconsistently in response to the approach of ambulances etc.
The minister has announced legislation to ensure that all AVs sold in the UK are to have compatible vehicle emergency recognition and avoidance strategies. Vehicle manufacturers are expected to argue as to which maker’s standards are the ones to be universally adopted.
K: ethical dilemmas
The behavioural algorithm for vehicles conforming to ISO94622 was based on the recommendations of a committee of eminent moral philosophers. The algorithm, when forced to choose between two individuals, prefers the younger, ceteris paribus. But, in a recent incident, a car prioritised a four-year old boy with a degenerative condition over a 78-year-old grandmother of 13.
The chair of the committee has been the target of death threats etc and various anti-technology groups are renewing their campaigns for the standard to be revoked.
L: system failure
A former technophile is locked for two days in a remote location inside his fully automated vehicle when it has a complete system failure. He responds by launching a campaign for manual override to be mandatory in all AVs and for all road vehicles in motion to contain at least one individual competent to drive.