
ABSTRACT
Charging services play an important role in encouraging the growth of the electric freight vehicle (EFV) market. Understanding charging strategies and their influence on charging behavior is crucial in the deployment of charging services. Unfortunately, existing charging strategy definitions and types are incoherent and incomplete. This conceptual paper synthesizes the perspectives found in literature on the charging strategy concept, and provides a definition based on Orlikowski’s structurational model of technology. A two-level charging strategy typology is proposed. The first distinguishes between decision-making modes: schedule- or trigger-based decisions. The second identifies when and where charging is used during a vehicle operating cycle. The result is three schedule-based charging strategies: downtime, opportunity, and intrusive charging, and one trigger-based emergency charging. The selection of strategy depends on the EFV operations, the availability of charging systems and services, as well as the driver behaviour. The influence of the strategy on enhancing the EFV, the carrier operations and business model is discussed. Charging behaviour, especially in location and timing, is shown to be strongly dependent on the strategy. While downtime charging is considered the default strategy, carriers should employ a variety of complementary strategies to enhance the capability of their vehicles and improve the financial viability of the operations. Carriers should also have an emergency charging strategy on hand in case of unforeseen situations.
Introduction
The electrification of road transport vehicles is one of the key ways to decarbonize the freight transport system (McKinnon, Allen, & Woodburn, Citation2011). Nevertheless, the industry – especially the medium to heavy duty segments – lags significantly behind the light duty vehicle (LDV) and bus transport segments globally, even in the provision of adequate private or public charging infrastructure (IEA, Citation2020; Welch, Citation2020). While the LDV market, whose build and supply chain share a lot in common with passenger cars, is more developed, it still only makes up 1.3% of new registrations in Europe in 2019 (EAFO, Citation2020b). Worse still, only 548 electric trucks were registered in 2019 (EAFO, Citation2020a). Part of the reason for the slow growth could be attributed to the prevalent state of the market for electric freight vehicles (EFVs), which is characterized by comparatively higher purchase prices, costly battery replacements, short driving distances, reduced payload capacity, limited vehicle models, and the underdeveloped repair and maintenance network, as well as the insufficient availability of charging infrastructure (C40 Cities, Citation2020; Christensen, Klauenberg, Kveiborg, & Rudolph, Citation2017; Lebeau, Macharis, & van Mierlo, Citation2016; Oliveira, Albergaria De Mello Bandeira, Vasconcelos Goes, Schmitz Gonçalves, & D’Agosto, Citation2017; Quak, Nesterova, van Rooijen, & Dong, Citation2016; Wang, Thoben, Bernardo, & Daudi, Citation2018). While the current state of the battery is responsible for the poor operational performance in both driving distance and payload capacity, recent trends point to the inevitable gradual or step-wise improvement of the battery pack energy and price attributes (Nykvist, Sprei, & Nilsson, Citation2019). Further, a number of major manufacturers have recently announced new EFVs with different battery capacities that will hopefully satisfy the market’s need. These are expected to arrive in the coming four years (C40 Cities, Citation2020; CALSTART, Citation2020; Liimatainen, van Vliet, & Aplyn, Citation2019). Nevertheless, it is unlikely that they will benefit from the newer cheaper battery packs and chemistry that have been announced, if research to market lead time of 1–5 years in the automotive industry is to be expected (Gerken, Moehrle, & Walter, Citation2015). Also, it remains a challenge to ensure that existing repair and maintenance networks are ready for the transition within the coming decade (IMI, Citation2020), specifically in ensuring training and upskilling for working with high voltage components in the vehicle (Fechtner, Saes, Fechtner, Braun, & Schmülling, Citation2016).
The state of charging infrastructure and services is also lacking. Charging infrastructure – both private and public – must be considered a fundamental aspect of the EFV system. Topsector Logistiek (Citation2019) estimated that approximately 17 thousand charging points are needed at home, depot, public charging stations, and customer locations to support EFVs in Amsterdam. The ACEA (Citation2020) has estimated that almost 300 thousand private, semi-public and public fast charging points will be needed by 2030 to support the EU’s EFV market. Their role is to support the basic charging of the battery (Funke, Gnann, & Plötz, Citation2015), to extend the driving range of the vehicle, if necessary (Teoh, Kunze, Teo, & Wong, Citation2018; Wolbertus & van den Hoed, Citation2019), and related to that overcome the so-called range anxiety that EFV drivers may experience (Lebeau et al., Citation2016), especially new drivers (Franke, Neumann, Bühler, Cocron, & Krems, Citation2012; Noel & Sovacool, Citation2016).
The provision of charging infrastructure is a complex challenge for the many stakeholders involved (Funke et al., Citation2015): from the energy supply market (e.g. in distribution infrastructure and sale of electricity) to those who facilitate the provision of charging services to end-users (San Román, Gómez, Momber, Abbad, & Sánchez Miralles, Citation2011). Issues such as sufficient capacity in the local grid, ensuring grid stability and supply-demand matching are challenges that have to be dealt with by the energy sector (Richardson, Citation2013; Topsector Logistiek, Citation2019). Charging service providers (CSPs), especially those who provide (semi-)public access chargers will need to ensure their placement of chargers, the types of services provided, such as fast or smart charging, dynamic pricing, correspond to the needs and preferences of users (Daina, Sivakumar, & Polak, Citation2017; Latinopoulos, Sivakumar, & Polak, Citation2017; Pagany, Ramirez Camargo, & Dorner, Citation2018). Thus, understanding user behaviour is crucial in the design of the service. For instance, Sun, Yamamoto, and Morikawa (Citation2016) discovered that commercial users are less willing to detour to access a charging services than private users, especially on workdays. Helmus and van den Hoed (Citation2015) establish that different types of drivers exhibit different charging behaviour, such as the inclination to charge at certain locations, schedule and duration. The reasons that underlie the use of public charging infrastructure are such as insufficient range, availability of opportunity, and preempting the lack of possibility to charge at the next destination (Wolbertus & van den Hoed, Citation2019).
Underlying charging choice and behaviour is the concept of charging strategy (Daina et al., Citation2017; Helmus & van den Hoed, Citation2015, p. 591). Studies have simulated charging behavior of urban freight transport (UFT) operations, such as waste collection, construction, catering, parcel, food and non-food retail, services, container transport (Macharis, van Mierlo, & van den Bossche, Citation2007; Taefi, Citation2016; Teoh, Citation2019; Teoh et al., Citation2018; Topsector Logistiek, Citation2019). However, the way charging strategies are defined in UFT research, if at all mentioned, has two main shortcomings, which motivate the paper. First, the types of charging strategies described in literature do not appear to be harmonised. For instance, they may emphasize technology (e.g. “fast charging”, “battery swapping”, “inductive charging”, “dynamic charging”), the location of charging (e.g. “home”, “depot charging”, “destination charging”, “by the road”), ownership of charging service (e.g. “public charging”), or reference the operations cycle (e.g. “nighttime charging”, “fast charging during long trips”, “in between trips integrated charging”) (Camilleri, Dablanc, & Eykerman, Citation2017; Jaller, Pineda, & Ambrose, Citation2018; Quak, Nesterova, & van Rooijen, Citation2016; Teoh et al., Citation2018; Topsector Logistiek, Citation2019). The diversity of categories used to define charging strategy calls into question their ad-hoc origins and whether they constitute a complete set.
The second shortcoming is the implicit assumption that charging activity is always planned, which contradicts studies that have identified spontaneous decisions leading to refuelling and recharging behaviour of car drivers (Kitamura & Sperling, Citation1987; Philipsen, Brell, Brost, Eickels, & Ziefle, Citation2018). While UFT routes and schedules are to a large extent planned, drivers are also given the freedom to optimise their own routes and delivery based on their situation and tacit knowledge (Sanchez-Diaz, Palacios-Argüello, Levandi, Mardberg, & Basso, Citation2020). It is risky to only rely on pre-planned charging activities, when situations like congestion, forced detour or unexpected queues at customers could happen, and lead to insufficient battery capacity or range anxiety. Thus, charging strategies should also include how drivers make on-the-fly charging decisions, in addition to pre-planned decisions.
This conceptual paper synthesizes the multiple perspectives found in literature on the charging strategy concept and define it according to the “structurational model of technology” (Orlikowski, Citation1992, Citation2000) and integrated in service science (Vargo & Akaka, Citation2012). Under this paradigm, “users interpret, appropriate, and manipulate [technology] in various ways, being influenced by a number of individual and social factors” (Orlikowski, Citation1992). This paradigm is appropriate in defining charging strategy as it puts the user in focal point and allows the flexible use of charging infrastructure in service of the user’s preferences regarding the use of EFV in operations. Based on this theoretical lens, a typology of charging strategies is proposed that incorporates existing ideas about charging strategies, while placing the user in the central decision-making role.
The remaining sections of this paper are organized as follows. In Section 2, the charging strategy is analysed using Orlikowski’s structurational model. Key considerations of the use of EFVs in operations, charging systems and charging services are discussed. Section 3 introduces the typology approach. In Section 4, the four types of charging strategies are described using the typology approach and discussed with reference to existing literature. Section 5 discusses the influence of charging strategies for EFV use and charging demand. Finally, the paper concludes with additional suggestions for further research.
Charging strategy through the structurational model of technology lens
This section aims to describe the application of Orlikowski’s model to the charging strategy concept, namely as an integration approach of charging systems and services in EFV operations.
Applying the structurational model of technology lens
The structurational model of technology has its origins in Giddens who proposed structural properties of social systems as a “set of enacted rules and resources that mediate social action” (Orlikowski, Citation2000). According to Orlikowski, the study of technology should shift from the physical artifact to its practice, focusing also on the embodied structural properties of its use (Orlikowski, Citation2000). Structures can be built-in as intended for by the designers, but also emerge when users use the technology, which Vargo and Akaka (Citation2012) describe as resource integration, “a central practice in value cocreation”. Value cocreation implies that the value of the service, e.g. charging service, is only determined by the beneficiary and only when the service is actually being used. The integration of the service is constrained and supported by the physical attributes of the service, the inscribed features by the service providers, the knowledge of the user, and institutionalized uses of the service (Orlikowski, Citation2000). Thus, users can interpret and decide how to integrate the service in new ways or in keeping with existing practices.
A charging strategy, in keeping with the general interpretation, is defined as the approach adopted by the carrier to integrate charging services into the EFV operation (Camilleri et al., Citation2017). The overall aim of the charging strategy is to support the EFV, thus enabling the carrier to achieve their business objectives, such as gaining competitive advantage (Steininger, Huntgeburth, & Veit, Citation2011). The primary objectives of the carrier play a key role in selection of the charging strategy. It must also account not only for the physical properties of the EFV, charging system, and charging services, but the level of knowledge and flexibility the carrier possesses to make use of them (Hutchins & Delmonte, Citation2012).
EFV operations
Decisions to use EFVs are strategic and determine “future courses of action, occupy the thinking of upper management, involve significant resource commitments, and impact a relatively large portion of the organization” (Nesbitt & Sperling, Citation2001). This decision depends on the operational fit of the EFV fleet to their logistics or mission profile, the short-term and long-term costs (Lebeau et al., Citation2016), and other values, such as sustainability (Kumar & Alok, Citation2020).
The operational considerations are elaborated below.
Legal and physical restrictions by the transport network: Vehicles must comply with the access restrictions, such as weight, width or height restrictions on particular roads, or the requirement for different licensing of drivers and vehicles by weight category, and environmental restrictions (Broaddus, Browne, & Allen, Citation2015; Quak & Koster, Citation2006). Weight constraints for the vehicle and driver licensing categories have been shown to force carriers to reorganise their operations (Morganti & Browne, Citation2018).
Dynamic driving range: Carriers need a reliable estimate of the EFV driving range to ensure that the route plans and schedules are feasible with the given battery capacity and charging schedule. However, the power output (used for the electric powertrain, comfort accessories and logistics equipment) varies throughout the driving operation, depending on “payload, speed profiles (i.e. acceleration and braking), topography of the road, instantaneous powertrain efficiency and auxiliary equipment (e.g. air-conditioning, cabin-heater, fridge unit)” (Basso, Kulcsár, Egardt, Lindroth, & Sanchez-Diaz, Citation2019), thus complicating the estimation of driving range. While some of these parameters can be forecasted, unplanned situations, such as congestion or queues, remain risk factors (Çabukoglu, Georges, Küng, Pareschi, & Boulouchos, Citation2018).
Battery capacity: The battery capacity limits the single-charge driving range and is a key cost factor for the purchase of the EFV. The battery should be minimized, without sacrificing operational performance (Taefi, Stütz, & Fink, Citation2017). Batteries also degrade with use and time affecting the long term performance (Habib, Kamran, & Rashid, Citation2015). Modular battery packs allow the user to adapt the EFV to suit their particular needs (Luccarelli, Matt, & Spena, Citation2013).
Capability to carry cargo: The EFV must provide for the physical attributes of the shipment and equipment to handle the shipments during transport, loading, and unloading, whether in providing power for refrigeration (Teoh, Citation2019) and lifts or to provide sufficient legal payload capacity.
Fleet management restrictions: Route and schedule planning models typically optimize operations (e.g. daily driving range, payload capacity, work schedule, and fleet size) to fulfill transport demand in terms of shipment orders (Juan, Mendez, Faulin, Armas, & Grasman, Citation2016). The use of EFVs, without an appropriate charging strategy, may result in adaptation of the logistics concept, extension of work-schedule, increasing fleet size, barring a reduction of shipment orders (Quak et al., Citation2016; Teoh et al., Citation2018; Wang et al., Citation2018).
Charging system compatibility: EFV’s battery management system and interface to the charging systems (e.g. the cable socket, overhead pantograph, or wireless charging receivers) need to be technically compatible (e.g. the physical attributes, safety standards, and communication protocols) with the charging system of choice (Foley, Winning, Gallachoir, & P, Citation2010).
The financial impact of EFV use is often evaluated by comparing the total cost of ownership (TCO) of the old and new vehicle system (Ansaripoor, Oliveira, & Liret, Citation2014; Taefi, Citation2016; Teoh et al., Citation2018). While the initial costs are significant, the expectation is that operational cost savings over the EFV’s lifetime will ultimately financially benefit the carrier. This, however, is contingent on the time discounting used, the prediction of energy prices (and the charging services) for the long term, the cost and availability of replacement parts, cost and quality of breakdown and repair services, and the stability of government transport policies (Ansaripoor et al., Citation2014; Davis & Figliozzi, Citation2013; Topsector Logistiek, Citation2019). Profitability can be achieved not only by reducing capital and operating costs, but by increasing mileage and exploiting business opportunities, especially using the green image (Taefi, Kreutzfeldt, Held, & Fink, Citation2015).
Addressing climate change impacts is one of the main reasons to switch to the more costly EFVs (Schulte & Ny, Citation2018). The switch to heavier EFVs and increased mileage (Taefi et al., Citation2015) to improve profitability may also increase energy use and its consequent environmental impact, in the case of fossil fuel power generation, and the more intensive use of the transport network, which is linked to increase in congestion, surface particulate matter emission and road degradation (Çabukoglu et al., Citation2018).
Charging system
During charging, electricity is transferred to and stored by the battery. The charging system’s technical aspects that influence the purchase of EFV and design of charging strategies are discussed below.
Location of battery during charging: Charging usually takes place while the battery is in the vehicle, except in the case of battery swapping, where the old battery is charged outside the vehicle. While battery swapping can be very fast and good for the battery life (Yang, Hao, & Chai, Citation2018), it has not yet proved commercially successful (Noel & Sovacool, Citation2016), except in closed environments (Schmidt, Eisel, & Kolbe, Citation2014) or for very light EVs (Lin, Suen, & Jang, Citation2009).
Motion of vehicle during charging: Stationary charging is considered the default. Quasi-dynamic charging systems are being used for vehicles at slow speeds, while decelerating to or accelerating from a resting position, or while momentarily in a resting position (Jang, Citation2018). Dynamic charging is used for vehicles moving at normal speeds. Besides its use in public transport and mining, dynamic charging of EFVs have not advanced beyond trials (Moultak, Lutsey, & Hall, Citation2017).
Charging interface: The default, conductive charging, transfers electricity via solid conduits, such as via a plug-in charging cable, overhead catenary systems, or so-called embedded third-rail systems (Gilbert, Citation2010). The system can be connected or disconnected manually or automatically. The eHighway technology features an retractable pantograph that automatically extends or retracts depending on whether a connection with the overhead catenary should be made (Nicolaides, Cebon, & Miles, Citation2018). Auto-eject technology can automatically disconnect plug-in charging cables from the vehicle (Salama et al., Citation2014). Inductive or wireless charging can transfer electricity over a small air-gap (Panchal, Stegen, & Lu, Citation2018). It affords a broader range of movement, as the connection can be automated, but suffers from lower transfer efficiency than conductive charging. Besides transfering power, the charging interface must also support communication protocols to control the charging process.
Charging power: In the context of LDVs, the literature differentiates between slow (about 2 kW) and fast charging (between 20 and 100 kW or more) (Botsford & Szczepanek, Citation2009). Fast charging for HDVs can reach up to 1MW (Transport & Environment, Citation2020).
Charging modes: Smart charging allows CSPs to schedule charging events for EFVs connected to the charging system (García-Villalobos, Zamora, San Martín, Asensio, & Aperribay, Citation2014). Charging is scheduled to optimize user preferences, such as cost or urgency, or energy system requirements, such as grid stability and vehicle-to-grid (V2G) applications (Hu, Morais, Sousa, & Lind, Citation2016; Rahman, Vasant, Singh, Abdullah-Al-Wadud, & Adnan, Citation2016; Sundstrom & Binding, Citation2011).
V2G integration: V2G technology changes the role of EFVs from energy consumers to energy storage units, while they are connected to the grid (via charging stations). The main benefits of this flexibility are “voltage and frequency regulation, peak power leveraging and reactive power support to enhance the operational efficiency, secure the electric grid and reduce power system operating cost” (Mwasilu, Justo, Kim, Do, & Jung, Citation2014). More research is required to understand the impact of V2G on the grid. The value of V2G to carriers is also unclear considering the faster battery degradation, with the increased charge-and-discharge cycles (Habib et al., Citation2015).
Many of the functional and structural aspects of charging systems have been standardized around the world leading towards SAE, DIN, ISO, IEC, and JEVS standards (Foley et al., Citation2010). Standardisation is a key method system designers institutionalize physical aspects of technology, giving “provisional” stability to the technology and its application (Orlikowski, Citation2000). Standardisation allows different CSPs to provide interoperable services to carriers (ChargeUp Europe, Citation2020).
The construction costs of a charging system is high and significantly affects the financial evaluation of EFV operations. Especially for private charging systems, the TCO should include the cost of construction and operation, although these are often absent from studies (Hagman, Ritzén, Stier, & Susilo, Citation2016; Taefi, Citation2016; Topsector Logistiek, Citation2019).
Charging services
In understanding the charging service, it is useful to distinguish between what the customer receives (i.e. electricity) and what the customer values (i.e. to profitably complete the driving and logistics duties), which follows the service-dominant logic paradigm (Vargo & Akaka, Citation2012). The core characteristic of the charging service is the access to this service. Access is often described in transport literature using capacity, coupling and authority constraints (Hägerstrand, Citation1970) or the spatial distribution of activities, the capability of the transport system, temporal constraints or the individual capability (van Wee & Geurs, Citation2011). In value co-creation, access denotes the permission and ability to obtain the resources needed for the firm’s own resource integration processes. Access to “other services” mainly depend on the quality of relationships (i.e. business contacts) between actors within the service ecosystem network (Akaka, Vargo, & Lusch, Citation2012). Charging service access as a function within the transport domain should be viewed from both the transport accessibility perspective and the suitability of the services to the carrier. Every stage of the charging process can contribute to or subtract from the accessibility to the service, which in turn affects the integration of the EFV system into the transport operation. The following are the main stages of the stationary charging process:
Search, evaluate and choose a suitable charging station (according to charging strategy)
Travel to the chosen charging station
Access the charging station and park
Connect with the charging equipment
Select the charging option
Charging of the battery
Pay for the charging service
Charging services can be physically, technologically or legally incompatible with the EFV, carrier and charging strategy. For instance, access to a charging service may require a subscription, membership or an exclusive payment method, thus necessitating payment or membership alliances between different service providers (Hardman et al., Citation2018). Just as parking standards cater to specific vehicle dimensions, the width, length, height or weight of the vehicle might not be compatible with charging points (ChargeUp Europe, Citation2020; Salama et al., Citation2014). Furthermore, the technical specifications of charging equipment, e.g. interface specifications, power or ICT protocols, should be compatible (Foley et al., Citation2010). Access to the charging area might also be restricted due to public regulation or private property (ChargeUp Europe, Citation2020). These incompatibility may be intentional or unintentional, as showcased by the rivalry between standards of charging equipment and protocols (Lubbers, Citation2014). Noel and Sovacool (Citation2016) also claim that manufacturers’ refusal to standardise vehicle architecture was the main barrier for a large-scale implementation of battery swapping in the car segment.
The access to charging services might also be enhanced, by appealing to the needs of users. For example, advanced or real-time information services could ease the search for suitable charging stations (Stage 1). Besides availability, it could provide information relevant to compatibility, such as in the OpenChargeMap, and provide precise access directions to minimize detours (Stage 2) (Sun et al., Citation2016). Guaranteed parking location with charging infrastructure could greatly enhance accessibility (Salama et al., Citation2014) (Stage 3). Acceptable time for searching for parking among private vehicle drivers for shopping trips was found to be between 8 and 13 mins (Chaniotakis & Pel, Citation2015). It can be expected that the tolerance for commercial drivers is much lower (Butrina, Del Carmen Girón-Valderrama, Machado-León, Goodchild, & Ayyalasomayajula, Citation2017), and search-for-parking could contribute to the “stress from time pressure” among commercial drivers, which has been mentioned as the second most important safety-critical issue (Hanowski, Wierwille, & Dingus, Citation2003). Finally, while varying electricity prices is much discussed in the charging context (mostly in connection with smart charging to level the energy grid demands), it is found that it plays only a minor role in the decision-making of passenger EV drivers, both for the location and schedule choice (Philipsen et al., Citation2018; Speidel & Bräunl, Citation2014). This insight agrees with the literature review on “routing issues of EVs” for carriers that the main aim is “to avoid inefficient vehicle routes with long detours” (Juan et al., Citation2016).
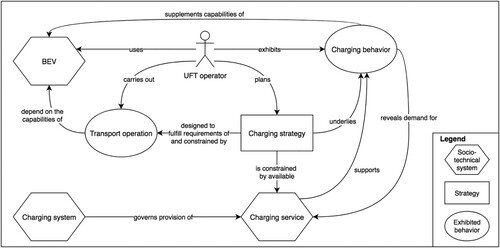
The resulting framework that posits the charging strategy as the decision variable taking into account business and operational considerations of the carrier, technical and service attributes of available charging services is presented in .
Figure 1. Conceptual framework for charging strategy.
Characterization of charging strategies
The charging strategy is defined as the approach adopted by the carrier to integrate charging services into the EFV operation. Summarizing the previous section, the value of the charging strategy is determined based on how it helps the carrier achieve the business objectives, which could range from operational and service quality to financial considerations and sustainability. The carrier’s charging strategy must circumnavigate the constraints from the transport operation perspective, ensure compatibility with the charging system, and optimize the use of available charging services.
The charging strategy should also be compatible with the decision-making mode of the carrier and ultimately the driver. This aspect is absent in EFV UFT research, but is present, though not explicitly, in studies on passenger car gasoline (Kitamura & Sperling, Citation1987) and CNG refuelling (Kelley & Kuby, Citation2013), and passenger EV charging (Philipsen et al., Citation2018). There are two main reasons for this absence in EFV studies. First, EFV studies focus on exhibited charging behaviour but not the decision-making process behind it. Car recharging behaviour and patterns are studied, usually based on stated or revealed preferences (Philipsen et al., Citation2018; Wolbertus & van den Hoed, Citation2019), hinting towards the users’ charging strategy. Another possible reason is the emphasis on planning operations using optimisation (Juan et al., Citation2016). While useful, there is nevertheless a need to expand the definition of how the operator integrates charging services for two reasons. First, there has always been an implicit expectation that drivers must make decisions on-the-fly and react to unplanned insufficient battery capacity. For instance, Lebeau et al. (Citation2016) find that “range anxiety” can be mitigated by the provision of “fast chargers in gas stations”. In other words, drivers having “range anxiety” anticipate that, if the need arises, they must be able to make the decision to charge during the journey. Second, it is a fact that drivers make decisions on-the-fly in the absence of, and sometimes in spite of detailed route planning. While there is a low level of adoption of fleet management systems, especially among small fleet carriers (Perego, Perotti, & Mangiaracina, Citation2011; Rincon-Garcia, Waterson, & Cherrett, Citation2017), even large companies may not use them to develop detailed route planning, leaving it instead to their experienced drivers to decide, based on “their existing knowledge on where customers are located and their respective opening hours” (Sanchez-Diaz et al., Citation2020). This is in line with Orlikowski’s model, which describes human action as influenced, but not dictated by “rules and norms” (Orlikowski, Citation2000), taken here to mean also designated route plans.
In summary, the typology of charging strategies will be developed on the basis of two general characteristics. The first is the decision-making mode. The second is the timing of the charging activity during the vehicle’s operating cycle. These provide the simplest typology approach that corresponds with the literature on charging behaviour and EFV use.
Decision-making modes
Two decision-making modes were suggested by Kitamura and Sperling (Citation1987) for gasoline car refuelling: “routinized or consciously planned refuelling” and “ad-hoc search for refuelling opportunities”. In the first, the driver plans where and when to refuel, in consideration of past experiences of available refuelling stations, own refuelling needs and schedule. In the second, the driver decides to refuel spontaneously, usually based on the vehicle’s low fuel levels. The ad hoc decision could be influenced by, inter alia, proximity to station, fuel prices, proximity to work or home, and brand loyalty (Kelley, Citation2018; Kelley & Kuby, Citation2013; Kitamura & Sperling, Citation1987). The two decision-making modes might complement each other, to create an adaptive strategy (Walker & Manson, Citation2014). These two decision-making modes constitute a complete set and will, in this study, be referred to as schedule- or trigger-based strategies.
A schedule-based charging strategy (SCS) explicitly plans for the time, place and duration of charging in the daily schedule. SCSs would be compatible with most logistics operations, due to the inclination of the industry towards planning and optimization (Rincon-Garcia et al., Citation2017). Plans are optimized towards reducing routing cost and time, and cost of charging service (Juan et al., Citation2016). The schedule that had been developed could be used multiple times and even become routinized (Kitamura & Sperling, Citation1987), which reflects the institutionalization process (Orlikowski, Citation2000).
A trigger-based charging strategy (TCS) is one where the driver chooses to recharge when a condition is met; such as if a low battery level is reached (Philipsen et al., Citation2018). The condition is evaluated in real-time. It triggers a series of decisions and actions to make the best of the situation. While a SCS optimizes the entire daily schedule, the TCS optimizes the situation at the point in time. While the resulting schedule may be sub-optimal, there are legitimate reasons to only adopt the TCS, especially considering the cost associated with extensive pre-decision information acquisition needed in SCS (Chorus, Molin, & van Wee, Citation2006).
Vehicle operating cycle
The typology approach also uses the vehicle operating cycle (Manheim, Citation1979). The use of the vehicle operating cycle clarifies when and where charging takes place in the operation. It is also in line with many of the existing charging strategy types. The following three states in the vehicle operating cycle are used to describe the charging strategies: driver activity, vehicle activity, and vehicle location.
Driver activity
The driver is the primary actor in the operating cycle, besides other actors like warehouse personnel. Charging activity has a direct impact on their driving performance and service quality, especially if they are delayed because of it. The activities that drivers do during operation time are driving, stationary work activity, or resting. Sanchez-Diaz et al. (Citation2020) find in a detailed time-study that driving and breaks take up only 30% and 15% of the time, respectively, while the remaining 55% is “used to perform activities not related to driving but to customer service and freight handling”. This would mean that 70% of the time, the vehicle is parked or idle while being in the responsibility of the driver, which offers opportunity for being charged. In cases where there is a delay, such as when there is a queue at the delivery area, the driver must also wait, although it should not be considered rest. Once the driver’s shift is over, the driver goes off-duty, though the vehicle could still be in use (Taefi, Citation2016). Some charging strategies are named after the driver activity, such as “during break and shift change”, “during loading activity”, “during unloading activity” (Teoh et al., Citation2018).
Vehicle activity
The vehicle has a parallel, but not identical cycle with the driver. While the driver is driving, the vehicle is either in a drive or creep mode. While the driver is unloading or loading, the vehicle is either parked or left to idle. EFVs, technically, do not idle, but sub-systems depending on the battery, such as refrigeration, may still be in use. The idling and creep modes of conventional vehicles are discussed by Gaines et al. (Citation2006) . Charging strategies are rarely named after the vehicle activity type, except for “dynamic charging” (Deflorio & Castello, Citation2017).
Vehicle location
The location of the vehicle while the driver’s activity is carried out is important in the selection of appropriate charging services. The driver typically starts from the depot, where the vehicle is parked at the end of the work shift to the beginning of the next day’s shift. The vehicle is stopped at loading bays for the loading or delivery of the goods, or during breaks. It uses the road network for driving. Some charging strategies are named after locations, such as home, depot, or destination (Teoh et al., Citation2018; Topsector Logistiek, Citation2019).
Typology of charging strategies
Applying the two characteristics, four distinct charging strategies were developed. The first three are schedule-based strategies, while the last is trigger-based. These are briefly described below focusing on the key element of the decision-making mode and where the charging is expected to fit considering the vehicle operating cycle.
Downtime charging strategy
The most basic and common charging strategy is the downtime charging strategy. Other terms that follow the same principle is “in-house charging” (Quak et al., Citation2016), “charging only during night-time” (Camilleri et al., Citation2017), “overnight charging” (Teoh et al., Citation2018), “depot-charging” (Jaller et al., Citation2018), and “home charging” (Topsector Logistiek, Citation2019). Charging takes place when the vehicle is parked for a long duration (usually) at the depot. It is often the default charging strategy and often the only one evaluated in most macroscopic-level electric freight transport evaluation studies (Davis & Figliozzi, Citation2013; Feng & Figliozzi, Citation2013; Lee, Thomas, & Brown, Citation2013).
Downtime charging is a SCS that occurs outside of the vehicle operational time, while the vehicle is stationary. At the end of the charging event, the battery is expected to be fully charged. Downtime charging allows for slow charging modes to be used, depending on the charging duration. The timing and duration of the downtime depend on the type of transport operation. For conventional eight-hour operations, charging may take place at night. In off-hour delivery operations charging takes place in the daytime (Taefi, Citation2016).
A consequence of using only downtime charging is that the driving range is fully restricted by the battery capacity. Such a choice can make the operations more expensive, because the high variability of daily energy requirements and high costs of running out-of-battery would make the operator have, but not fully utilize, large expensive batteries (Salama et al., Citation2014). Providing vehicles with different sized batteries would partly solve the problem. Routes can also be optimized using multiple driving ranges (Juan et al., Citation2014). Alternatively, battery sizing models can optimize the variability between the energy needs of vehicles.
Opportunity charging strategy
Opportunity charging is the most conceptually broad SCS. The basic aim is that the operating schedule does not change because of the need to charge, either by requiring detours or by adding non-value-added time. While the literature usually only considers stationary charging under this strategy, e.g. “in-between trips integrated charging” (Camilleri et al., Citation2017), “charge-on-the-stop”, “destination charging” (Transport & Environment, Citation2020), a charging strategy using dynamic charging technology would also be considered an opportunity charging strategy. The key conditions are that the driver performs the required transport task, such as loading, unloading, having a break, or even driving, while the charging activity occurs simultaneously. The time taken by the driver to initiate (or approve) the charging event should be negligible.
Opportunity charging can be divided into three: stationary, quasi-dynamic, and dynamic charging. Stationary opportunity charging takes place while the EFV is parked and the driver is loading or unloading the vehicle, delivering the goods, taking breaks, or during the shift-change for multi-shift operations (Taefi, Citation2016). Stationary opportunity charging uses fast charging systems at parking locations where the driver parks for the scheduled work activities, such as at “the location of the customers”, “construction sites” (Christensen et al., Citation2017) or resting areas (Mareev, Becker, & Sauer, Citation2018). There is little guarantee that a charging location will be available for the driver, unless it is exclusive for loading and unloading activities (Morganti & Browne, Citation2018). However, in case the locations cannot be reserved, such as for on-street parking, parking search strategies may be used (Butrina et al., Citation2017).
During the quasi-dynamic charging strategy, the EFV moves very slowly (perhaps decelerating or accelerating or creeping) in the transport network or is stationary for very short period(s). This may occur, for instance, at signalized intersections. Quasi-dynamic charging has been implemented for bus systems, where approximately minute-long bus stops are used to charge the bus at a very high power (e.g. reaching even 500 kW) while passengers are moving in and out of the bus (Rogge, Wollny, & Sauer, Citation2015). Analogous to the bus use pattern could be the refuse truck use pattern which makes many quick stops that can be used for fast charging (Nicolaides et al., Citation2018). While potentially any high traffic attractor can suffer from queuing congestion at its entrance, these are probably not appropriate spaces for quasi-dynamic charging. The focus should be on reducing the congestion, which yields disutility not only due to potential range uncertainty (Franke et al., Citation2012) but also due to travel time and unreliability costs.
In the dynamic charging strategy, the EFV is moving at normal traffic speeds usually on a single lane in the road. Common applications in urban areas are bus and tram systems, which use overhead catenary systems, third rail systems, or wireless charging systems installed in the road pavement (Gilbert, Citation2010). Since it needs to be installed on the road network, the implementation of dynamic charging relies on the decisions by government agencies, who need to be convinced of its public benefit. Thus, the benefit should be assessed using large-scale traffic models that integrate the freight, public transport and private passenger vehicles and include a charging or energy-use module (Deflorio & Castello, Citation2017).
Intrusive charging strategy
Intrusive charging strategy is an SCS that interrupts or delays driving activity to charge. Other names of the strategy are “fast charging during long trips” (Camilleri et al., Citation2017), “public charging” (Jaller et al., Citation2018; Quak et al., Citation2016), “mid trip charging” (Christensen et al., Citation2017) and “boost charging” (Morganti & Browne, Citation2018). The charging time and the detour taken to reach the charging station lowers the operational efficiency. Many studies attempt to minimise the impact by optimizing the drivers’ route and schedule (Afroditi, Boile, Theofanis, Sdoukopoulos, & Margaritis, Citation2014; Bruglieri, Pezzella, Pisacane, & Suraci, Citation2015; Lin, Zhou, & Wolfson, Citation2016; Schneider, Stenger, & Goeke, Citation2012). If drivers engage in “parallel activities” during the waiting time (Philipsen et al., Citation2018), then this strategy approaches the opportunity charging described before.
A challenge of using public charging infrastructure in intrusive charging is the potential queuing time, exacerbated by the low supply of public charging stations and by the long charging duration of each customer (Morganti & Browne, Citation2018). Fast charging should be used to reduce the operational impact on the user. Alternatively, battery swapping stations might be an option, despite the technical and business model challenges. In the absence of booking systems (see Chokkalingam, Padmanaban, Siano, Krishnamoorthy, and Selvaraj (Citation2017) for an example), route planners need to rely on forecasts, based on models (Said, Cherkaoui, & Khoukhi, Citation2015) or “mental maps” (Kitamura & Sperling, Citation1987), neither of which are completely reliable. There is potential for enhancing the plans by integrating real-time information on charging availability into dynamic vehicle routing applications (Cattaruzza, Absi, Feillet, & González-Feliu, Citation2017).
Emergency charging strategy
In the emergency charging strategy, the driver is alerted to or “triggered by” a particular condition of the battery level, while driving. This practice of “recharging when a condition is fulfilled” should be viewed as a tactical decision. As Franke et al. (Citation2012) explain, the practice of high range buffers (i.e. recharging when SOC is high) is a problem-solving action rather than a coping mechanism for range anxiety. This applies to other types of conditions set.
A set of examples of range-based conditions, proposed by Philipsen et al. (Citation2018) for passenger EVs could be considered:
insufficient battery power for the next planned trip,
battery level below an independently set level,
the battery is fully discharged, or
the battery level is below a desired buffer level.
Condition 1 addresses exactly the driver’s need, but might be difficult to implement. An example of a concrete trigger could be the battery level which allows the EFV to always be within driving distance of a charging station. The challenge would be to regularly update the estimate of the energy consumption of the drive between the current location and the nearest charging station. Continuous queries for route planning is fraught with difficulties (Malviya, Madden, & Bhattacharya, Citation2011), even without consideration of dynamic energy consumption rates.
Conditions 2–4 are static, and are therefore easier to implement. Condition 2 implies an arbitrarily set battery level, whereas condition 4 implies that the set battery level is calculated and purposeful, such as guaranteeing a minimum driving range of 5 kilometres. Condition 3 is not recommended, as it might leave the EV stranded.
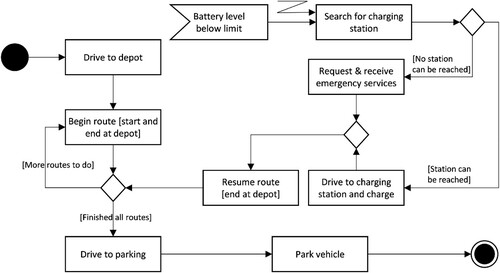
Once a condition is reached, the driver can take several potential actions. illustrates how the search for a charging station is triggered and the driver’s current route is interrupted, when the battery level reaches a certain limit. The search begins for the charging services available and to gauge whether the nearest can be reached. If that is not possible, roadside assistance services with mobile charging units are called (Huang, He, Gu, Wood, & Benjaafar, Citation2014). Clearly, this emergency state should be avoided whenever possible, as a vehicle stranded in the road network severely disrupts the operation. EFVs should be equipped with range-estimation to reduce range-related stress (Eisel, Nastjuk, & Kolbe, Citation2016), and the charging network should be sufficient. Due to its risky nature, the emergency charging strategy is expected to only be used by a small group of carriers.
Figure 2. Activity diagram for the emergency charging strategy.
Comparison between charging strategies
The charging strategies provide qualitative descriptors of how carriers may integrate charging services into their EFV-based transport operations. The typology scheme corresponds with many of the charging strategies discussed in UFT literature, except for the emergency charging strategy, which derives mostly from passenger car literature. Next, the impacts of the charging strategies on the transport operations and charging service demand are discussed.
Influence on EFV operations
The charging strategy strongly influences the value of EFVs to the carriers, and thus on future purchasing decisions. The charging strategy must be designed to fulfil the operational and financial requirements of the transport operation. Operationally, the charging strategy primarily affects the daily driving range and the operational schedule. Using the downtime charging as the baseline, the following observations can be made. Opportunity charging increases the daily driving range of the EFV while maintaining operational efficiency. Intrusive charging increases the daily driving range, but reduces operational efficiency, both in added detours and charging time. Both offer the possibility for multi-shift operations, especially for use in night time deliveries, where silent EFVs are useful (Taefi, Citation2016). The emergency charging strategy reduces operational efficiency, much like intrusive charging, but could cause significant delays to the transport operation, if a suitable charging station is not reached in time. It could be suitable for time-wise flexible logistics operations, e.g. by own-account service logistics, or for experienced EFV drivers.
Ultimately, this can affect the financial cost and profitability of using EFVs, which is a key factor in fleet decisions (Hagman et al., Citation2016). Strategies that increase the capability of the EFV increase the value of the purchase. However, the operational costs, such as energy and maintenance costs, may increase, as more charging services are required and the battery degrades quicker (Taefi et al., Citation2017). Battery leasing models could alleviate battery degradation concerns but will further transform the cost structure of the carrier (Yang et al., Citation2018). Furthermore, the unreliability of emergency charging may also lead one to keep a spare EFV in case the usual vehicle is out of service.
The selection and use of a charging strategy depends on the knowledge of the carriers (Orlikowski, Citation2000). However, Hutchins and Delmonte (Citation2012) point out that the level of knowledge of charging solutions and their influence on operations could be still insufficient. This could be one of the main reasons why downtime charging is often the only strategy considered for UFT operations by fleet managers (Camilleri et al., Citation2017; Hutchins & Delmonte, Citation2012). Downtime charging is simpler to implement than others, in terms of planning and providing the service, as everything is the carrier’s responsibility. Services catering to dynamic opportunity charging, intrusive charging and emergency charging are often operated by CSPs. If these services are known, carriers can easily appropriate these services. In contrast, initiating the installation of stationary opportunity charging stations involves the question of who manages and operates the service, especially if it is located at customer locations or public parking space (Salama et al., Citation2014; Topsector Logistiek, Citation2019).
Influence on charging service demand
Charging strategies cannot be carried out without appropriate charging service provision. In the design stage of charging services and charging infrastructure, it is important to identify what the potential customers need, based on their charging strategy, and willingness-to-pay (Daina et al., Citation2017). From a macro-perspective, the charging strategy mainly influences the location of charging service demand and behaviour in time.
The charging strategy adopted decides where charging services need to be used. Topsector Logistiek (Citation2019) estimated that 11,481 charging points were needed for delivery vans in residential areas in Amsterdam for downtime charging. Roughly speaking, the number of charging points corresponds to the size of the fleet. In stationary opportunity charging the locations will have to be negotiated clearly with the relevant stakeholders, such as parking authorities or owners of the loading bay. Salama et al. (Citation2014) provide examples of how curbside space was allocated for EFV charging, while unloading to nearby retail outlets. In this case, traffic regulations, clear signage, and enforcement were needed to ensure the success of the initiative, besides ensuring high utilization of the valuable urban space. Other charging strategies primarily rely on catchment based on high traffic flow, such as fast charging stations for intrusive or emergency charging located along main transport corridors or at truck parking (ChargeUp Europe, Citation2020; Transport & Environment, Citation2020).
The type of charging strategy also influences the timing and amount of charging demand, which have implications for the availability of services (i.e. avoiding queues for the service) (Çabukoglu et al., Citation2018; Juan et al., Citation2016; Morganti & Browne, Citation2018), local grid infrastructure constraints (i.e. whether grid upgrades are needed for building or the district) (Topsector Logistiek, Citation2019), and managing energy demand peaks (i.e. by applying smart charging or V2G) (Richardson, Citation2013). Infrastructure for downtime charging would tend to be exclusive to a particular company or vehicle, while other infrastructure may be publicly accessible. Stations attracting high traffic will have to contend with the queues and may need to offer some form of reservation service or advanced information system to ensure freight operators have confidence in the service. While downtime charging generally occurs overnight using relatively slow charging stations, the other charging strategies require high powered charging, during the day. Planned or spontaneous charging events can be spread out at different times during the day (Teoh, Citation2019; Wolbertus & van den Hoed, Citation2019). The need for charging services to serve downtime charging depends on the size of the fleet of the company. Larger companies, with many simultaneously charging vehicles, may need to invest significantly in local grid upgrades. Utilization of these chargers are low during the day. Fast charging stations will generally need new grid infrastructure to support the high-powered equipment. Thus, generally, the use of other charging strategies than downtime charging will push energy demand from night to daytime.
Conclusion
While research on charging infrastructure and the use of EFVs for urban freight operations is not new, some of the concepts underlying charging behaviour are still underdeveloped. This conceptual paper postulated the charging strategy concept as a key link between the observed charging behaviour, the presence of charging infrastructure and services, and the use of EFVs in the transport network, based on the structurational model of technology developed by Orlikowski (Citation2000, Citation1992). The theory proposes that the use of technology is constrained and supported not only by the physical attribute of the technology, but also the intended features inscribed by the service providers, the knowledge and flexibility of the user, and how the use of the technology (or service) is institutionalized among other users. Within this framework, users are free to decide how a technology or service should be used. This forms the basis of the definition of a charging strategy, which shifts from how the literature often portrays it, as description of technology, location, types of access to the service, or just a reference to the operational schedule. The charging strategy is defined as the approach adopted by the carrier to integrate charging services into the EFV operation, particularly focusing on the decision-making mode and how it fits into the vehicle operating cycle. Based on this, four unique charging strategy types are proposed: downtime, opportunity, intrusive and emergency charging. The charging strategies correspond to the various types that have been proposed, tested and modelled in EFV literature, with the exception of emergency charging, which is derived primarily from passenger car literature (Kitamura & Sperling, Citation1987; Philipsen et al., Citation2018).
Each charging strategy has a strong influence on the financial and operational performance of the transport operation and requires different types of charging systems and services to function. While downtime charging is considered the default strategy, carriers should employ a variety of complementary strategies to enhance the capability of their vehicles and improve the financial viability of the operations. Opportunity charging makes use of “opportunities” when the vehicle location coincides with available charging services, thus extending the capability of the vehicle, without adding detours or extending operating time. In contrast, intrusive charging extends the capability of the vehicle, but requires detours and extends the operating time. Emergency charging is a unique strategy, as charging events are unplanned, but are triggered depending on user-defined criteria, such as low battery level. Only experienced drivers with time-wise flexibility can make use of this strategy alone. However, it would be wise for carriers using the other charging strategies to also outline a procedure for emergency charging, in case the need arises, perhaps from unforeseen congestion. The charging strategy also influences demand for charging services and the resulting charging behavior. The two main influences are on location and timing of the charging activity. Downtime charging requires as many charging points as the vehicles in the fleet, but the other charging strategies can share charging points, thus increasing utilization. The timing for the charging services also differ, as downtime charging often takes place at night, while in the other strategies, charging takes place during the day.
The concept and typology here provide categories for researchers to develop EFV transport and charging behavior models grounded in a theory of technology use. Fleet managers considering the use of EFVs may also benefit from understanding the charging strategy options available to them. The various charging strategies should also provide inspiration for the comprehensive development of decision support systems for fleet managers. Future research could also undertake charging behaviour studies focusing on carriers, as currently the only studies identified have been for passenger drivers, such as by Wolbertus & van den Hoed (Citation2019). Similar studies looking at attitudes of fleet managers on the adoption of different charging strategies and the desired value proposition of charging services, which reflect the work carried out by Philipsen et al. (Citation2018) would also be helpful to describe better the reasons for selecting a charging strategy beyond the usual TCO or cost–benefit framework. The new insights could support the development of market diffusion studies and help outline charging deployment policy and infrastructure measures for the city.
Acknowledgements
This work was conducted within the scope of Center of Excellence Sustainable Urban Freight Systems and funded by the Volvo Research and Education Foundation through its Future Urban Transport research program.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- ACEA. (2020). ACEA Position Paper: Charging and re-fuelling infrastructure required for heavy-duty vehicles.
- Afroditi, A., Boile, M., Theofanis, S., Sdoukopoulos, E., & Margaritis, D. (2014). Electric Vehicle Routing Problem with industry constraints. Trends and insights for Future research. Transportation Research Procedia, 3, 452–459. doi:https://doi.org/10.1016/j.trpro.2014.10.026
- Akaka, M. A., Vargo, S. L., & Lusch, R. F. (2012). An exploration of networks in value cocreation: A service-ecosystems view. In Stephen L. Vargo & Robert F. Lusch (Eds.), Special issue – toward a better understanding of the role of value in markets and marketing (Vol. 9, pp. 13–50). Bingley: Emerald Group Publishing Limited.
- Ansaripoor, A. H., Oliveira, F. S., & Liret, A. (2014). A risk management system for sustainable fleet replacement. European Journal of Operational Research, 237(2), 701–712. doi:https://doi.org/10.1016/j.ejor.2014.02.006
- Basso, R., Kulcsár, B., Egardt, B., Lindroth, P., & Sanchez-Diaz, I. (2019). Energy consumption estimation integrated into the Electric Vehicle Routing problem. Transportation Research Part D: Transport and Environment, 69, 141–167. doi:https://doi.org/10.1016/j.trd.2019.01.006
- Botsford, C., & Szczepanek, A. (2009 May 13−16). Fast charging vs. slow charging: Pros and cons for the New Age of Electric Vehicles. In: EVS24 International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium. EVS24 International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium. Stavanger, Norway.
- Broaddus, A., Browne, M., & Allen, J. (2015). Sustainable Freight. Impacts of the London congestion charge and Low emissions zones. Transportation Research Record, 2478(1), 1–11. doi:https://doi.org/10.3141/2478-01
- Bruglieri, M., Pezzella, F., Pisacane, O., & Suraci, S. (2015). A variable neighborhood search branching for the Electric Vehicle Routing Problem with time windows. Electronic Notes in Discrete Mathematics, 47, 221–228. doi:https://doi.org/10.1016/j.endm.2014.11.029
- Butrina, P., Del Carmen Girón-Valderrama, G., Machado-León, J. L., Goodchild, A., & Ayyalasomayajula, P. C. (2017). From the Last Mile to the Last 800 ft. Transportation Research Record, 2609(1), 85–92. doi:https://doi.org/10.3141/2609-10
- C40 Cities. (2020). Zero-emissions freight: Vehicle market and policy development briefing for C40 Cities. Retrieved from: https://www.c40knowledgehub.org/s/article/Zero-emission-freight-Vehicle-market-and-policy-development-briefing-for-C40-cities?language=en_US
- Çabukoglu, Emir; Georges, Gil; Küng, Lukas; Pareschi, Giacomo; Boulouchos, Konstantinos (2018): battery electric propulsion. An option for heavy-duty vehicles? Results from a Swiss case-study. Transportation Research Part C: Emerging Technologies 88, pp. 107–123. doi:https://doi.org/10.1016/j.trc.2018.01.013.
- CALSTART. (2020). Drive to Zero’s ZETI Analytics. Truck Range vy Vehicle Type, U.S. Canada, and Europe. Retrieved from: https://globaldrivetozero.org/tools/zeti-analytics/
- Camilleri, P., Dablanc, L., & Eykerman, P. (2017, October 17−20). Possible charging strategies for the use of electric vans by urban freight companies. In: 7th METRANS International Urban Freight Conference, Long Beach, California, METRANS.
- Cattaruzza, D., Absi, N., Feillet, D., & González-Feliu, J. (2017). Vehicle routing problems for city logistics. EURO Journal on Transportation and Logistics, 6 (1), 51–79. doi:https://doi.org/10.1007/s13676-014-0074-0
- Chaniotakis, E., & Pel, A. J. (2015). Drivers’ parking location choice under uncertain parking availability and search times. A stated preference experiment. Transportation Research Part A: Policy and Practice, 82, 228–239. doi:https://doi.org/10.1016/j.tra.2015.10.004
- ChargeUp Europe. (2020). Position paper on the Revision of Directive 2014/94/EU on the Deployment of Alternative Fuels Infrastructure.
- Chokkalingam, B., Padmanaban, S., Siano, P., Krishnamoorthy, R., & Selvaraj, R. (2017). Real-time forecasting of EV charging station scheduling for smart energy systems. Energies, 10(3), 377. doi:https://doi.org/10.3390/en10030377
- Chorus, C. G., Molin, E. J. E., & van Wee, B. (2006). Use and effects of advanced traveller information services (ATIS). A Review of the literature. Transport Reviews, 26(2), 127–149. doi:https://doi.org/10.1080/01441640500333677
- Christensen, L., Klauenberg, J., Kveiborg, O., & Rudolph, C. (2017). Suitability of commercial transport for a shift to electric mobility with Denmark and Germany as use cases. Research in Transportation Economics, 64, 48–60. doi:https://doi.org/10.1016/j.retrec.2017.08.004
- Daina, N., Sivakumar, A., & Polak, J. W. (2017). Electric vehicle charging choices. Modelling and implications for smart charging services. Transportation Research Part C: Emerging Technologies, 81, 36–56. doi:https://doi.org/10.1016/j.trc.2017.05.006
- Davis, B. A., & Figliozzi, M. A. (2013). A methodology to evaluate the competitiveness of electric delivery trucks. Transportation Research Part E: Logistics and Transportation Review, 49(1), 8–23. doi:https://doi.org/10.1016/j.tre.2012.07.003
- Deflorio, F., & Castello, L. (2017). Dynamic charging-while-driving systems for freight delivery services with electric vehicles. Traffic and energy modelling. Transportation Research Part C: Emerging Technologies, 81, 342–362. doi:https://doi.org/10.1016/j.trc.2017.04.004
- EAFO. (2020a). Heavy duty fleet data 2020. European Alternative Fuels Observatory. Retrieved from: https://www.eafo.eu/vehicles-and-fleet/n2-n3, checked on 10/20/2020
- EAFO. (2020b). Light commercial vehicles fleet data 2020. European Alternative Fuels Observatory. Retrieved from: https://www.eafo.eu/vehicles-and-fleet/n1, checked on 10/20/2020
- Eisel, M., Nastjuk, I., & Kolbe, L. M. (2016). Understanding the influence of in-vehicle information systems on range stress – insights from an electric vehicle field experiment. Transportation Research Part F: Traffic Psychology and Behaviour, 43, 199–211. doi:https://doi.org/10.1016/j.trf.2016.10.015
- Fechtner, H., Saes, K.-H., Fechtner, E., Braun, T., & Schmülling, B. (2016). Clarification of the training Requirements for working on electric vehicles. International Journal of Advanced Corporation Learning, 9 (1), 35. DOI:https://doi.org/10.3991/ijac.v9i1.5635
- Feng, W., & Figliozzi, M. (2013). An economic and technological analysis of the key factors affecting the competitiveness of electric commercial vehicles. A case study from the USA market. Transportation Research Part C: Emerging Technologies, 26, 135–145. doi:https://doi.org/10.1016/j.trc.2012.06.007
- Foley, A. M., Winning, I. J., Gallachoir, O., & P, B. (2010). State-of-the-art in electric vehicle charging infrastructure. In: 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 01/09/2010 - 03/09/2010: IEEE, 1–6.
- Franke, T., Neumann, I., Bühler, F., Cocron, P., & Krems, J. F. (2012). Experiencing range in an electric vehicle. Understanding psychological barriers. Applied Psychology, 61(3), 368–391. doi:https://doi.org/10.1111/j.1464-0597.2011.00474.x
- Funke, S. Á., Gnann, T., & Plötz, P. (2015). Addressing the different needs for charging infrastructure. An analysis of some criteria for charging infrastructure Set-up. In W. L. Filho & R. Kotter (Eds.), E-Mobility in Europe (pp. 73–90). Cham: Springer International Publishing (Green Energy and Technology).
- Gaines, L., Vyas, A., & Anderson, J. L. (2006). Estimation of fuel use by idling commercial trucks. Transportation Research Record, 1983(1), 91–98.
- García-Villalobos, J., Zamora, I., San Martín, J. I., Asensio, F. J., & Aperribay, V. (2014). Plug-in electric vehicles in electric distribution networks. A review of smart charging approaches. Renewable and Sustainable Energy Reviews, 38, 717–731. doi:https://doi.org/10.1016/j.rser.2014.07.040
- Gerken, J. M., Moehrle, M. G., & Walter, L. (2015). One year ahead! Investigating the time lag between patent publication and market launch: Insights from a longitudinal study in the automotive industry. R&D Management, 45(3), 287–303. doi:https://doi.org/10.1111/radm.12085
- Gilbert, R. (2010). Grid connections, batteries, and On-board generation. Sources for electric traction. Journal of Urban Technology, 17(3), 53–66. doi:https://doi.org/10.1080/10630732.2010.553048
- Habib, S., Kamran, M., & Rashid, U. (2015). Impact analysis of vehicle-to-grid technology and charging strategies of electric vehicles on distribution networks – a review. Journal of Power Sources, 277, 205–214. doi:https://doi.org/10.1016/j.jpowsour.2014.12.020
- Hägerstrand, T. (1970). What about people in Regional science? Papers of the Regional Science Association, 24(1), 6–21. doi:https://doi.org/10.1007/BF01936872
- Hagman, J., Ritzén, S., Stier, J. J., & Susilo, Y. (2016). Total cost of ownership and its potential implications for battery electric vehicle diffusion. Research in Transportation Business & Management, 18, 11–17. doi:https://doi.org/10.1016/j.rtbm.2016.01.003
- Hanowski, R. J., Wierwille, W. W., & Dingus, T. A. (2003). An on-road study to investigate fatigue in local/short haul trucking. Accident Analysis & Prevention, 35(2), 153–160. doi:https://doi.org/10.1016/S0001-4575(01)00098-7
- Hardman, S., Jenn, A., Tal, G., Axsen, J., Beard, G., Daina, N., et al. (2018). A review of consumer preferences of and interactions with electric vehicle charging infrastructure. Transportation Research Part D: Transport and Environment, 62, 508–523. doi:https://doi.org/10.1016/j.trd.2018.04.002
- Helmus, J., & van den Hoed, R. (2015). Unraveling user type characteristics. Towards a taxonomy for charging infrastructure. World Electric Vehicle Journal, 7 (4), 589–604. doi:https://doi.org/10.3390/wevj7040589
- Hu, J., Morais, H., Sousa, T., & Lind, M. (2016). Electric vehicle fleet management in smart grids. A review of services, optimization and control aspects. Renewable and Sustainable Energy Reviews, 56, 1207–1226. doi:https://doi.org/10.1016/j.rser.2015.12.014
- Huang, S., He, L., Gu, Y., Wood, K., & Benjaafar, S. (2014). Design of a mobile charging service for electric vehicles in an Urban environment. IEEE Transactions on Intelligent Transportation System, 1–12. doi:https://doi.org/10.1109/TITS.2014.2341695
- Hutchins, R., & Delmonte, E. (2012, October 8−10). Fleet manager decision-making behaviour in relation to electric vehicles. In: European Transport Conference 2012. European Transport Conference, Glasgow, Scotland, Association for European Transport (AET).
- IEA. (2020). Global EV Outlook 2020. Entering the decade of electric drive?
- IMI. (2020). Ten years to get at least 55,000 technicians trained on electric vehicles! Institute of the Motor Industry (IMI). Retrieved from: https://tide.theimi.org.uk/industry-latest/news/ten-years-get-least-55000-technicians-trained-electric-vehicles, updated on 11/16/2020
- Jaller, M., Pineda, L., & Ambrose, H. (2018). Evaluating the use of zero-emission vehicles in last mile Deliveries. ITS-Davis (ITS Reports, 2017(33)). Retrieved from: https://escholarship.org/uc/item/7kr753 nm
- Jang, Y. J. (2018). Survey of the operation and system study on wireless charging electric vehicle systems. Transportation Research Part C: Emerging Technologies, 95, 844–866. doi:https://doi.org/10.1016/j.trc.2018.04.006
- Juan, A. A., Goentzel, J., & Bektaş, T.. (2014). Routing fleets with multiple driving ranges: Is it possible to use greener fleet configurations? Applied Soft Computing, 21, 84–94. doi:https://doi.org/10.1016/j.asoc.2014.03.012
- Juan, A., Mendez, C., Faulin, J., Armas, J. d., & Grasman, S. (2016). Electric vehicles in Logistics and Transportation. A Survey on Emerging environmental, strategic, and operational challenges. Energies, 9 (2), 86. doi:https://doi.org/10.3390/en9020086
- Kelley, S. (2018). Driver Use and perceptions of refueling stations near freeways in a developing infrastructure for Alternative Fuel vehicles. Social Sciences, 7 (11), 242. doi:https://doi.org/10.3390/socsci7110242
- Kelley, S., & Kuby, M. (2013). On the way or around the corner? Observed refueling choices of alternative-fuel drivers in southern california. Journal of Transport Geography, 33, 258–267. doi:https://doi.org/10.1016/j.jtrangeo.2013.08.008
- Kitamura, R., & Sperling, D. (1987). Refueling behavior of automobile drivers. Transportation Research Part A: General, 21(3), 235–245. doi:https://doi.org/10.1016/0191-2607(87)90017-3
- Kumar, R. R., & Alok, K. (2020). Adoption of electric vehicle. A literature review and prospects for sustainability. Journal of Cleaner Production, 253, 119911. doi:https://doi.org/10.1016/j.jclepro.2019.119911
- Latinopoulos, C., Sivakumar, A., & Polak, J. W. (2017). Response of electric vehicle drivers to dynamic pricing of parking and charging services. Risky choice in early reservations. Transportation Research Part C: Emerging Technologies, 80, 175–189. doi:https://doi.org/10.1016/j.trc.2017.04.008
- Lebeau, P., Macharis, C., & van Mierlo, J. (2016). Exploring the choice of battery electric vehicles in city logistics. A conjoint-based choice analysis. Transportation Research Part E: Logistics and Transportation Review, 91, 245–258. doi:https://doi.org/10.1016/j.tre.2016.04.004
- Lee, D.-Y., Thomas, V. M., & Brown, M. A. (2013). Electric urban delivery trucks. Energy use, greenhouse gas emissions, and cost-effectiveness. Environmental Science & Technology, 47(14), 8022–8030. doi:https://doi.org/10.1021/es400179w
- Liimatainen, H., van Vliet, O., & Aplyn, D. (2019). The potential of electric trucks – An international commodity-level analysis. Applied Energy, 236, 804–814. doi:https://doi.org/10.1016/j.apenergy.2018.12.017
- Lin, B.-M., Suen, S.-H., & Jang, J. S.-C. (2009). Promotion strategy of electric scooters in Taiwan. World Electric Vehicle Journal, 3(1), 69–72. doi:https://doi.org/10.3390/wevj3010069
- Lin, J., Zhou, W., & Wolfson, O. (2016). Electric Vehicle Routing problem. Transportation Research Procedia, 12, 508–521. doi:https://doi.org/10.1016/j.trpro.2016.02.007
- Lubbers, B. (2014). The fastned story. Part I & II. Amsterdam: Lubbers; Uitgeverij Boekenbent.
- Luccarelli, M., Matt, D., & Spena, P. R.. (2013). Impact of electromobility on automotive architectures. 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17-20 Nov. 2013.
- Macharis, C., van Mierlo, J., & van den Bossche, P. (2007). Combining intermodal Transport With electric vehicles. Towards more Sustainable solutions. Transportation Planning and Technology, 30(2-3), 311–323. doi:https://doi.org/10.1080/03081060701395618
- Malviya, N., Madden, S., & Bhattacharya, A. (2011, April 11−16). A continuous query system for dynamic route planning. In: 2011 IEEE 27th International Conference on Data Engineering, Hannover, IEEE, 792–803.
- Manheim, M. L. (1979). Fundamentals of transportation systems analysis. Cambridge, MA: MIT Press (MIT Press series in transportation studies, 4).
- Mareev, I., Becker, J., & Sauer, D. (2018). Battery dimensioning and Life Cycle costs analysis for a heavy-duty truck considering the requirements of long-haul transportation. Energies, 11(1), 55. doi:https://doi.org/10.3390/en11010055
- McKinnon, A., Allen, J., & Woodburn, A. (2011). Development of greener vehicles, aircraft and ships. In A. C. McKinnon (Ed.), Green logistics. Improving the environmental sustainability of logistics. Reprinted (pp. 140–166). London: Kogan Page.
- Morganti, E., & Browne, M. (2018). Technical and operational obstacles to the adoption of electric vans in France and the UK. An operator perspective. Transport Policy, 63, 90–97. doi:https://doi.org/10.1016/j.tranpol.2017.12.010
- Moultak, M., Lutsey, N., & Hall, D. (2017). Transitioning to zero-emission heavy-duty freight vehicles. Washington DC: ICCT.
- Mwasilu, F., Justo, J. J., Kim, E.-K., Do, T. D., & Jung, J.-W. (2014). Electric vehicles and smart grid interaction. A review on vehicle to grid and renewable energy sources integration. Renewable and Sustainable Energy Reviews, 34, 501–516. doi:https://doi.org/10.1016/j.rser.2014.03.031
- Nesbitt, K., & Sperling, D. (2001). Fleet purchase behavior. Decision processes and implications for new vehicle technologies and fuels. Transportation Research Part C: Emerging Technologies, 9 (5), 297–318. doi:https://doi.org/10.1016/S0968-090X(00)00035-8
- Nicolaides, D., Cebon, D., & Miles, J. (2018). Prospects for Electrification of road freight. IEEE Systems Journal, 12(2), 1838–1849. doi:https://doi.org/10.1109/JSYST.2017.2691408
- Noel, L., & Sovacool, B. K. (2016). Why Did Better place fail? Range anxiety, interpretive flexibility, and electric vehicle promotion in Denmark and Israel. Energy Policy, 94, 377–386. doi:https://doi.org/10.1016/j.enpol.2016.04.029
- Nykvist, B., Sprei, F., & Nilsson, M. (2019). Assessing the progress toward lower priced long range battery electric vehicles. Energy Policy, 124, 144–155. doi:https://doi.org/10.1016/j.enpol.2018.09.035
- Oliveira, C., Albergaria De Mello Bandeira, R., Vasconcelos Goes, G., Schmitz Gonçalves, D., & D’Agosto, M. (2017). Sustainable vehicles-based alternatives in Last Mile distribution of Urban freight transport. A systematic literature review. Sustainability, 9 (8), 1324. doi:https://doi.org/10.3390/su9081324
- Orlikowski, W. J. (1992). The duality of technology. Rethinking the concept of technology in organizations. Organization Science, 3 (3), 398–427. doi:https://doi.org/10.1287/orsc.3.3.398
- Orlikowski, W. J. (2000). Using technology and constituting structures. A practice lens for studying technology in organizations. Organization Science, 11(4), 404–428. doi:https://doi.org/10.1287/orsc.11.4.404.14600
- Pagany, R., Ramirez Camargo, L., & Dorner, W. (2018). A review of spatial localization methodologies for the electric vehicle charging infrastructure. International Journal of Sustainable Transportation, 13(6), 433–449. doi:https://doi.org/10.1080/15568318.2018.1481243
- Panchal, C., Stegen, S., & Lu, J. (2018). Review of static and dynamic wireless electric vehicle charging system. Engineering Science and Technology, an International Journal, 21(5), 922–937. doi:https://doi.org/10.1016/j.jestch.2018.06.015
- Perego, A., Perotti, S., & Mangiaracina, R. (2011). ICT for logistics and freight transportation. A literature review and research agenda. International Journal of Physical Distribution & Logistics Management, 41(5), 457–483. doi:https://doi.org/10.1108/09600031111138826
- Philipsen, R., Brell, T., Brost, W., Eickels, T., & Ziefle, M. (2018). Running on empty – users’ charging behavior of electric vehicles versus traditional refueling. Transportation Research Part F: Traffic Psychology and Behaviour, 59, 475–492. doi:https://doi.org/10.1016/j.trf.2018.09.024
- Quak, H., & Koster, R. d. (2006). The impacts of time access restrictions and vehicle weight restrictions on food retailers and the environment. European Journal of Transport and Infrastructure Research, 6 (2), doi:https://doi.org/10.18757/ejtir.2006.6.2.3430
- Quak, H., Nesterova, N., van Rooijen, T., & Dong, Y. (2016). Zero emission city logistics. Current practices in freight electromobility and feasibility in the near future. Transportation Research Procedia, 14, 1506–1515. doi:https://doi.org/10.1016/j.trpro.2016.05.115
- Quak, H., Nesterova, N., & van Rooijen, T. (2016). Possibilities and barriers for using electric-powered vehicles in city logistics practice. Transportation Research Procedia, 12, 157–169. doi:https://doi.org/10.1016/j.trpro.2016.02.055
- Rahman, I., Vasant, P. M., Singh, B. S. M., Abdullah-Al-Wadud, M., & Adnan, N. (2016). Review of recent trends in optimization techniques for plug-in hybrid, and electric vehicle charging infrastructures. Renewable and Sustainable Energy Reviews, 58, 1039–1047. doi:https://doi.org/10.1016/j.rser.2015.12.353
- Richardson, D. B. (2013). Electric vehicles and the electric grid. A review of modeling approaches, impacts, and renewable energy integration. Renewable and Sustainable Energy Reviews, 19, 247–254. doi:https://doi.org/10.1016/j.rser.2012.11.042
- Rincon-Garcia, N., Waterson, B. J., & Cherrett, T. J. (2017). Requirements from vehicle routing software. Perspectives from literature, developers and the freight industry. Transport Reviews, 38(1), 117–138. doi:https://doi.org/10.1080/01441647.2017.1297869
- Rogge, M., Wollny, S., & Sauer, D. (2015). Fast charging battery buses for the Electrification of Urban public transport—A feasibility study focusing on charging infrastructure and energy storage requirements. Energies, 8 (5), 4587–4606. doi:https://doi.org/10.3390/en8054587
- Román, S., Gómez, T., Momber, I., Abbad, M. R., & Sánchez Miralles, Á. (2011). Regulatory framework and business models for charging plug-in electric vehicles. Infrastructure, agents, and commercial relationships. Energy Policy, 39(10), 6360–6375. doi:https://doi.org/10.1016/j.enpol.2011.07.037
- Said, D., Cherkaoui, S., & Khoukhi, L. (2015). Multi-priority queuing for electric vehicles charging at public supply stations with price variation. Wireless Communications and Mobile Computing, 15(6), 1049–1065. doi:https://doi.org/10.1002/wcm.2508
- Salama, P., Lubinsky, A., Kraft, K., Lipson, P., Torres, L., Roy, B., … Windover, P. (2014). New York city Green loading zones study. Albany, NY: New York State Energy Research and Development Authority (NYSERDA).
- Sanchez-Diaz, I., Palacios-Argüello, L., Levandi, A., Mardberg, J., & Basso, R. (2020). A time-efficiency study of medium-duty trucks delivering in Urban environments. Sustainability, 12(1), 425. doi:https://doi.org/10.3390/su12010425
- Schmidt, J., Eisel, M., & Kolbe, L. M. (2014). Assessing the potential of different charging strategies for electric vehicle fleets in closed transport systems. Energy Policy, 74, 179–189. doi:https://doi.org/10.1016/j.enpol.2014.08.008
- Schneider, M., Stenger, A., & Goeke, D. (2012). The electric vehicle-routing problem with time windows and recharging stations. Technical report 02/2012. University of Kaiserslautern.
- Schulte, J., & Ny, H. (2018). Electric road systems. Strategic stepping stone on the way towards sustainable freight transport? Sustainability, 10(4), 1148. doi:https://doi.org/10.3390/su10041148
- Speidel, S., & Bräunl, T. (2014). Driving and charging patterns of electric vehicles for energy usage. Renewable and Sustainable Energy Reviews, 40, 97–110. doi:https://doi.org/10.1016/j.rser.2014.07.177
- Steininger, D. M., Huntgeburth, J. C., & Veit, D. J. (2011, August 4−7). Conceptualizing business models for competitive advantage research by integrating the resource and market-based views. In: AMCIS 2011 Proceedings - All Submissions, Detroit, Michigan.
- Sun, X.-H., Yamamoto, T., & Morikawa, T. (2016). Fast-charging station choice behavior among battery electric vehicle users. Transportation Research Part D: Transport and Environment, 46, 26–39. doi:https://doi.org/10.1016/j.trd.2016.03.008
- Sundstrom, O., & Binding, C. (2011, July 24−28). Charging service elements for an electric vehicle charging service provider. In: 2011 IEEE power and energy society general meeting, Detroit, IEEE, 1–6.
- Taefi, T. T. (2016). Viability of electric vehicles in combined day and night delivery: A total cost of ownership example in Germany. European Journal of Transport and Infrastructure Research, 16(4), 600–618. doi:https://doi.org/10.18757/ejtir.2016.16.4.3160
- Taefi, T. T., Kreutzfeldt, J., Held, T., & Fink, A. (2015). Strategies to increase the profitability of electric vehicles in Urban freight transport. In R. Kotter & W. L. Filho (Eds.), pp. 367–388. E-Mobility in Europe. Trends and good practice (1st ed). Cham: Springer International Publishing; Imprint: Springer (Green Energy and Technology).
- Taefi, T. T., Stütz, S., & Fink, A. (2017). Assessing the cost-optimal mileage of medium-duty electric vehicles with a numeric simulation approach. Transportation Research Part D: Transport and Environment, 56, 271–285. doi:https://doi.org/10.1016/j.trd.2017.08.015
- Teoh, T. (2019, May 26–31). Battery electric vehicles for refrigerated urban freight transport: an evaluation. In: World Conference on Transport Research - WCTR 2019 Mumbai 2019, WCTRS. Retrieved from: https://www.researchgate.net/publication/342183211_Battery_electric_vehicles_for_refrigerated_urban_freight_transport_an_evaluation/
- Teoh, T., Kunze, O., Teo, C.-C., & Wong, Y. (2018). Decarbonisation of Urban freight Transport Using Electric vehicles and opportunity charging. Sustainability, 10(9), 3258. doi:https://doi.org/10.3390/su10093258
- Topsector Logistiek. (2019). Charging infrastructure for electric vehicles in urban logistics. Retrieved from: https://www.panteia.nl/nieuws/grote-kansen-elektrische-stadlogistiek/
- Transport & Environment. (2020). Recharge EU trucks: time to act! A roadmap for electric truck charging infrastructure deployment.
- van Wee, B., & Geurs, K. (2011). Discussing equity and social exclusion in accessibility evaluations. European Journal of Transport and Infrastructure Research, 11(4).
- Vargo, S. L., & Akaka, M. A. (2012). Value cocreation and service systems (Re)Formation. A service ecosystems view. Service Science, 4 (3), 207–217. doi:https://doi.org/10.1287/serv.1120.0019
- Walker, G., & Manson, A. (2014). Telematics, urban freight logistics and low carbon road networks. Journal of Transport Geography, 37, 74–81. doi:https://doi.org/10.1016/j.jtrangeo.2014.04.006
- Wang, M., Thoben, K.-D., Bernardo, M., & Daudi, M. (2018). Diversity in employment of electric commercial vehicles in urban freight transport. A literature review. Logistics Research, 11(10), 1–13. doi:https://doi.org/10.23773/2018_10
- Welch, D. (2020). The beachhead model. Catalyzing mass-market opportunities for zero-emission commercial vehicles. Pasadena: CALSTART.
- Wolbertus, R., & van den Hoed, R. (2019). Electric vehicle fast charging needs in Cities and along corridors. WEVJ, 10(2), 45. doi:https://doi.org/10.3390/wevj10020045
- Yang, L., Hao, C., & Chai, Y. (2018). Life Cycle assessment of commercial delivery trucks. Diesel, plug-In electric, and battery-swap electric. Sustainability, 10(12), 4547. doi:https://doi.org/10.3390/su10124547