
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
We perform a systematic review of real-time control strategies for transfer synchronisations in public transport. In particular, we review inter-station and intra-station control measures that can be applied in near real-time, including vehicle holding, stop-skipping, speed control, short-turning, rescheduling, interlining, rerouting, and boarding limits. The topic of public transfer synchronisation at the operational phase is both a technically challenging and timely topic. It is technically challenging because finding optimal control measures is a computationally intensive problem and these measures should be computed in near real-time. It is also timely because of the emerging developments in shared mobility, Mobility-as-a-Service schemes, on-demand public transport, and vehicle automation that pose new opportunities as well as challenges in designing seamless passenger transfers. In our systematic review, we analyse the modelling approaches for real-time transfer synchronisation, including mathematical programmes, heuristics, rule-based approaches, and stochastic optimisation models. We then critically discuss the available literature and provide a future outlook, outlining six research directions.
1. Introduction
Public transport services can be planned at the strategic, tactical, and operational level. Even if public transport networks and timetables are efficiently designed at the strategic and tactical planning levels, real-time fluctuations caused by travel time variations or passenger demand uncertainties can result in missed transfer connections and increased passenger travel times (Ceder, Golany, & Tal, Citation2001; Gkiotsalitis & Maslekar, Citation2018). Especially in densely populated areas, traffic congestion and demand variations can influence the arrival times of public transport vehicles at the transfer stops resulting in missed transfer connections. Consequently, there has been a significant increase in studies aimed at developing efficient decision support models for real-time public transport control over the past 20 years. The control measures applied during operations are typically corrective (reactionary) measures that try to mitigate the negative impacts of unexpected disruptions (Sáez et al., Citation2012). These control measures may include, among others, vehicle holding, stop-skipping, speed control, short-turning, rescheduling, interlining, rerouting, and limited passenger boarding. In this study we consider two broad categories of control measure decisions: the time planning category, and the routing category. Control measures such as vehicle holding, speed control, dispatching time rescheduling, and limited passenger boarding belong to the time planning category, whereas control measures such as stop-skipping, rerouting, interlining, and short-turning belong to the routing category.
The recent influx of real-time information made available by in-vehicle sensors and automatic fare collection systems, the vast increase in computational capabilities that can support real-time decision support systems, and the advances in communication technology (driver – control centre communication) allow for the monitoring and control of public transport systems in near real-time. These developments have led to a significant increase in studies devoted to real-time public transport control. These studies propose mathematical programmes, rule-based approaches or heuristic methods which are using real-time data to compute optimal control measures for managing public transport vehicles. The literature review of Ibarra-Rojas, Delgado, Giesen, and Muñoz (Citation2015) briefly discusses the recent expansion of real-time control measures, while its main focus is on strategic and tactical planning. Liu, Cats, and Gkiotsalitis (Citation2021) review public transport transfer synchronisation works at the strategic and tactical levels, but they do not consider real-time control measures. A more recent research survey by Gkiotsalitis and Cats (Citation2021) focuses explicitly on real-time control measures in public transportation, but is exclusively concerned with at-stop control measures and, more importantly, it does not review works on passenger transfer synchronisations.
The goal of this review study is to provide a systematic review of the use of real-time control strategies for improving public transport transfer synchronisations. To the best of our knowledge, this is the first systematic review that examines the recent advances of real-time decision support tools which improve the synchronisation of public transport services at transfer stops to allow passengers to transfer. This specific topic is timely because the emerging developments on the supply side (e.g. shared mobility, Mobility-as-a-Service schemes, on-demand public transport) have increased the number of passenger transfers and the number of potential transfer locations. Furthermore, advancements in data collection and computational capabilities have made it possible to monitor the operations and provide near real-time decision support.
The objectives of this review are to examine whether past studies have: (a) explored all possible real-time control methods for public transport transfer synchronisation; (b) developed control methods with appropriate objectives and key performance indicators; (c) considered the implications of control measures to the provided services; (d) developed control methods that offer reliable decisions; and (e) considered the future synchronisation needs of shared mobility modes and self-driving vehicles. This review also examines which control measures have been studied the most, which are the complexities of the developed models, and which are the most common control measure combinations.
In the remainder of this study, we present our research methodology (section 2), synthesise and critically discuss past studies on real-time control measures for public transport synchronisation (sections 3–5) and offer a research agenda outlining directions for further research (section 6).
2. Research methodology
We conduct a systematic review that employs scientific strategies. We limit potential bias by conducting systematic assembly, critical appraisal, and synthesis of all relevant studies on the subject of operational control measures for public transport synchronisation. As defined in Cook, Mulrow, and Haynes (Citation1997), the scientific strategies should include a comprehensive search of relevant articles and they should use reproducible criteria in the selection of articles. To this end, we implemented a reproducible search of past works at the Web of Science and Scopus databases by including keywords related to public transport synchronisation and the following control measures: (i) vehicle holding; (ii) stop-skipping; (iii) speed control; (iv) short-turning; (v) rescheduling / dispatching time changes; (vi) interlining; (vii) rerouting; and (viii) limitations of vehicle boardings. Each of the searches in the databases combined three keywords, where keyword 1 was either public transport, bus, train or metro; keyword 2 was either transfer synchronisation or transfer coordination; and keyword 3 was one of the control measures presented in (i)–(viii). In all cases, we retrieved all works that included all 3 keywords in their title, abstract or keywords’ list.
After filtering the overlapping works between different control measures, we retrieved 232 unique works from which 57 were found relevant to the topic of this research. From the 57 studies, 23 studies use only vehicle holding, 9 use only stop-skipping, and 25 use a combination of at least two of the control measures presented in (i)–(viii) to improve the public transport synchronisation at the operational level. It is important to note that control measures (iii)–(viii) are not applied as standalone measures, but only in combination with each other or with control measures (i) and (ii). That is, only the vehicle holding and stop-skipping control measures are used as standalone measures in past studies. Hence, the main body of this literature review is structured in three sections: one focusing on vehicle holding, one on stop-skipping, and one on the combination of at least two control measures. summarises the number of published studies per 5-year period for each one of the three categories.
Figure 1. Number of publications with vehicle holding, stop-skipping, and combined control measures from 1990 until June 2021.
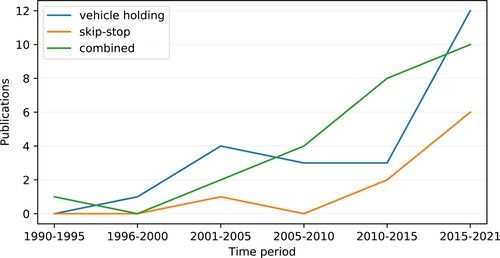
From one can note that operational control studies for public transport synchronisation started to gain prominence after 2000. Especially in the last six years, the number of vehicle holding works has tripled. Stop-skipping studies have also increased considerably after 2010. Improvements in computational capabilities, public transport data collection and storage, and new business models that require synchronised transfers have arguably played a role in the increasing prominence of this research area. It is the objective of this study to investigate the current status of real-time control measures for public transport synchronisation and provide future research directions in light of the emerging trends.
3. Vehicle holding
Vehicle holding is typically deployed for improving service regularity or service punctuality of public transport lines. With vehicle holding, service providers strive to maintain acceptable headways between trips of the same service line by holding a vehicle at a stop when it is too close to its preceding vehicle or ahead of its schedule. Vehicle holding is implemented when the vehicle visits a particular station/stop, which is also referred to as a control point or an intermediate time point.
Holding control studies have focused in the last couple of decades on single-line service regularity. Approaches that consider only the headway between the previous vehicle and the vehicle for which the holding decision is made are known as one-headway-based control methods (Fu & Yang, Citation2002). If both the time headway between the previous and the next vehicles are considered, these decision-making approaches are called two-headway-based control methods. There are also approaches that do not make a holding decision for a specific vehicle, but they decide simultaneously about the holding times of several vehicles that operate in the same line. These approaches result in short-term planning of the vehicle holding times and these plans can be updated every time a vehicle arrives at a station (event-based vehicle holding) or after a specific time period (time-based vehicle holding). To update the vehicle holding suggestions, one needs to solve a mathematical optimisation problem with several decision variables, which are as many as the number of running vehicles multiplied by the number of control point stops. Solving such vehicle holding problems is time-intensive and this might result in including a small number of trips and stations in the planning horizon of the vehicle holding decisions (Eberlein, Wilson, & Bernstein, Citation2001). In general, vehicle holding approaches can be classified into those using analytic solutions, rule-based approaches, approaches that resort to heuristics, and approaches that consider the stochasticity (uncertainty) of the vehicle arrival times at transfer stops when making holding decisions. These approaches are analysed below.
3.1. Analytic solutions
A classic one-headway-based control method that also considers transfer synchronisation and uses an analytic solution is the approach of Hall, Dessouky, and Lu (Citation2001). This study determines the holding time of a bus at a transfer stop while waiting for the arrival of passengers from other lines. The vehicle holding problem that considers transfers has to solve the inherent conflict between the increase of in-vehicle passenger time when a bus is held and increased waiting times for passengers who miss transfer connections. Hall et al. (Citation2001) combined these two conflicting objectives into an objective function. In more detail, consider that a bus is ready to be dispatched at time 0 but other buses (numbered based on their arrival order) are late.
is the number of onboard passengers, and
represent the transferring passengers per bus, with arrival times
. The objective is to find the dispatching time,
, of the held bus that minimises the overall waiting time of passengers. If
is the departure time of the next bus that follows the same route of the bus under consideration, then the optimal dispatching time for the bus under consideration will lie between the current time and
. The problem of Hall et al. (Citation2001) is to find the optimal dispatching time,
, that minimises the overall passenger waiting time,
:
(1)
(1) Another study that proposes an analytic solution for the transfer synchronisation problem at the tactical level is the study of Kieu, Bhaskar, Almeida, Sabar, and Chung (Citation2016). This study investigated the timed transfer coordination between a receiving and a feeding vehicle. The proposed model decides whether a vehicle is held at the transfer stop to allow for short transfers, or departs as scheduled. This single-stop trunk-feeder model has an analytic solution. The holding decision is, however, myopic and the study emphasised the importance of having accurate passenger demand predictions.
3.2. Rule-based approaches
In this subsection we review works that use pre-defined rules for determining the holding time of a vehicle rather than a full-fledged optimisation. The works are presented in chronological order. Dessouky, Hall, Nowroozi, and Mourikas (Citation1999) proposed a conditional probability model for bus delays and tested different rule-based strategies, such as hold until all scheduled buses have arrived at the transfer stop, hold for a maximum of 1.5 min if all scheduled buses have not arrived, do not hold, and more. They then applied these rule-based strategies in the simulation model SLAMSYSTEM and evaluated the timed transfers at a terminal.
Jenq, Pierce, and Pate (Citation2005) evaluated the US first light rail–to–bus connection protection system. The connection protection system was implemented using holding and aimed at improving the reliability of transfers from higher-frequency light rail trains to lower-frequency bus lines. Chung and Shalaby (Citation2007) proposed a connection protection strategy for holding a transit vehicle when another transit vehicle is delayed and they cannot meet their timed transfer. The evaluation of the strategy was performed with simulation using a rail line and a local bus line in the city of Brampton, Canada. The developed model decided about holding a vehicle or not based on a rule-based algorithm.
Lo, Chang, Kuo, and Kuo (Citation2009) implemented different dynamic holding strategies in a Mass Rapid Transit (MRT) – Bus transfer system. The objective was to reduce passenger travelling times, including transfer times. The holding strategies were pre-determined, having a similar outlook to rule-based approaches. The pre-determined strategies were tested in a simulation for one MRT station in Taipei, Taiwan, that was a transfer station between the MRT service and five bus lines.
Delgado, Contreras, and Munoz (Citation2013) proposed also a rule-based holding control approach for a single transfer point between trunk and feeder lines. Their objective was to minimise the passenger waiting times (both in-vehicle and at the transfer stop). Hu, Guo, Xi, and Li (Citation2015) proposed a rule-based holding control that considers passenger transfers and tested it in a toy network.
Anderson and Daganzo (Citation2017) proposed a dynamic holding strategy for transfer coordination. In their proposed holding strategy, the maximum holding time considers the uncertainty of bus and passenger arrival times. Their objective was to reduce the total travel time (waiting plus in-vehicle) of passengers and their rule-based holding strategy considers the uncertainty of the bus arrival times at the transfer stops.
Li, Li, Meng, and Zhang (Citation2018) proposed a dynamic holding strategy to coordinate the operations of rail, rapid transit, bus and on-demand transit. Their main objective was the transfer connection protection with the implementation of rule-based holding control. Their dynamic holding control strategy was implemented at the Tri-Delta Transit agency in the eastern Contra Costa region of California. Finally, Gavriilidou and Cats (Citation2019) developed a real-time rule-based holding controller that considers both the objectives of single-line service regularity as well as inter-line transfer synchronisation. The evaluation of two different rule-based holding controllers (called MinPassTime and MinPassCongTime) was performed with the use of the public transport operations and passenger assignment simulation model, BusMezzo, for tram lines in The Hague.
3.3. Heuristic approaches
The use of heuristic approaches can facilitate the implementation of real-time operational control measures for increasing the actual occurrences of synchronised transfers in public transport networks. Ting and Schonfeld (Citation2007) proposed a heuristic for holding a vehicle at a transfer station. They aimed at minimising the total costs of dispatching vehicles at each transfer station. The total costs included the waiting of on-board passengers, the transfer times, the missed connection, and possible transfer costs at downstream transfer stations.
Lo and Chang (Citation2012) designed a real-time fuzzy bus holding system for the mass rapid transit (MRT)-Bus transfer system. They employed fuzzy logic as a heuristic to achieve the following holding-related goals: reducing the bus waiting time, reducing the passenger waiting time, and reducing the passenger travelling time.
Chen and Schonfeld (Citation2016) developed a dispatching control model that determines whether each vehicle should be dispatched immediately or be held in order to wait for some late incoming vehicles. This control model was applied in the context of service disruptions and is aimed at reducing missed-connection costs that might incur at the next transfer terminals. Their proposed model was a mixed-integer non-linear programme and it was solved with an iterative metaheuristic that implements a Genetic Algorithm (GA) and Sequential Quadratic Programming (SQP) at each iteration. Their model’s application was mostly in the field of intermodal freight operation, but it can be expanded to public transport. In a follow-up work, Chen, Tsai, and Schonfeld (Citation2016) developed three models for coordinating vehicles at the level of timetable scheduling and real-time holding and they used a hybrid heuristic solution approach combining GA and SQP. In a later study, Sun and Schonfeld (Citation2016) proposed a holding method for mitigating the effect of service disruptions on coordinated intermodal freight operations.
3.4. Approaches that consider uncertainties
There are several factors, such as fluctuations in passenger demand, driving behaviour of bus drivers, and traffic disruptions, which may lead to unreliable and missed transfer connections. Chung, Mahmoodi Nesheli, and Shalaby (Citation2020) proposed a connection protection approach that applies vehicle holding in order to wait for another vehicle that is delayed. They incorporated the probabilistic nature of transit operations in their model formulation to arrive at robust decisions. Gkiotsalitis, Eikenbroek, and Cats (Citation2020) developed a robust bus dispatching model that considers both line regularity and transfer times of passengers. The developed model incorporated the travel time and passenger demand uncertainties in its formulation. This resulted in a minimax problem where the objective was to find the dispatching times that perform better in a worst-case travel time and passenger demand scenario, both in terms of transfer synchronisation and line regularity.
To summarise, the vehicle holding works that improve the coordination of public transport operations are presented in . All methods presented in have a polynomial running time, except for the approach of (Chen & Schonfeld, Citation2016) that uses a GA and SQP and its running time depends on the maximum number of allowed iterations for the GA and the number of alternations between the GA and SQP.
Table 1. Classification of studies using bus holding for public transport transfer synchronisation.
It is commendable that a number of studies incorporated the travel time and passenger demand uncertainty in the vehicle holding decisions since it is already challenging to solve a deterministic holding problem in near real-time. Notwithstanding, the vast majority of studies resort to rule-based solutions or (meta)heuristics that do not guarantee the computation of a globally optimal solution and this might impact the efficiency of the holding suggestions. The main reason behind this is the required computational cost to solve vehicle holding problems to global optimality. Another key factor for using rule-based methods and (meta)heuristics is that transfer coordination problems involve incomplete information because the arrival times of connecting vehicles and the number of transferring passengers is usually unknown at the time of a decision. Hence, a globally optimal solution might not be known until these values have been observed resulting in the adoption of rule-based or (meta)heuristic strategies.
Regarding the objectives of the holding models, aside from maximising transfer synchronisation metrics, many studies try to reduce the overall passenger travel time by considering both the transfer time and the in-vehicle travel times of passengers when their vehicles are held at stops. Because of the complexity of the vehicle holding problem and the requirement to produce solutions in near real-time, most studies focus on holding decisions at a single transfer stop without considering impacts extending to other lines.
4. Skip-stop
Stop-skipping, also known as expressing, is an additional at-stop control approach to improve transfer synchronisation. Originally used for reducing the trip travel times and/or avoiding overcrowding, stop-skipping measures can also be implemented to improve passenger transfers in the case of delayed vehicles that might arrive late at a downstream transfer stop. This is especially important in the case of feeder lines connecting to low-frequency services.
Stop-skipping approaches vary according to the problem objectives and the number of decisions. In terms of decisions, there are dynamic stop-skipping methods that decide which stops should be skipped by an individual vehicle when it is about to be dispatched. This is the easiest form of stop-skipping problems that can be solved with brute-force approaches for service lines, for example with up to 14 stations (Fu, Liu, & Calamai, Citation2003). More complicated approaches, aim to develop the stop-skipping schedules of a number of trips that will be dispatched within a short time window (Gkiotsalitis, Citation2021; Yang et al., Citation2019b) or for the total number of trips that will operate during the entire day (Gkiotsalitis, Citation2019).
Stop-skipping is a combinatorial decision problem where the decision of skipping a station for a vehicle
can be modelled by a binary variable
, where
if the station is served and
if the stop is skipped. That is, the number of decisions (e.g. potential solutions) increases exponentially with the number of trips and stations. This increase is
, where
is the total number of trips and
the total number of stops of the service line. That is, the time complexity of stop-skipping problems in exponential. In the most trivial case, one might decide about the skipped stops of a single trip resulting in a total number of
decisions that can be evaluated with the use of brute force for mid-sized public transport lines (Fu et al., Citation2003).
In its simplest form, stop-skipping is applied to a vehicle that is running late in order to avoid a missed connection with another vehicle. Considering this vehicle, a rule-based approach might select to skip stops by comparing the number of boardings/alightings at each stop along the route and skipping the stops with the lowest passenger demand levels.
Although there are not as many stop-skipping works as works on vehicle holding, stop-skipping has gained prominence over the past 10 years as a standalone control measure for public transport transfer coordination. Pan, Yu, Liu, and Chen (Citation2020) proposed a multiline coordinated stop-skipping strategy to prevent extreme passenger flow and densities at transfer stations. They developed a binary programming model that was solved by a genetic algorithm. Abdelhafiez, Salama, and Shalaby (Citation2017) used also stop-skipping as a control strategy to minimise the average travel time of passengers, considering passenger transfers. They developed a non-linear integer mathematical model that was solved using a heuristic for large-size problem instances.
Lee, Shariat, and Choi (Citation2014) developed a stop-skipping model using a Genetic Algorithm that coordinated the stopping stations in rail operation. In their model, they considered increased access times, waiting times, travel times, and transfers. Implementing their model in Seoul Metro system’s Line 4, they reduced the total travel time by 17%–20%, however, the waiting, transfer, and additional access times increased by 24%–38%. A Genetic Algorithm was also proposed by Sun, Zhu, Ye, and Wang (Citation2013) and Yang, Huang, Wang, and Chen (Citation2019a) who developed a stop-skipping model that can minimise the total travel time for passengers in bus and train networks, respectively. The standalone stop-skipping works are summarised in .
Table 2. Classification of studies on stop-skipping for public transport transfer synchronisation.
Compared to the vehicle holding research domain, research on stop-skipping appears to be relatively underdeveloped. Most works are from the past decade and resort to (meta)heuristics. As a combinatorial (binary) problem, there is great potential to device efficient mathematical models that can be solved to global optimality at least for mid-sized instances, and further research is required in order to reduce the computational costs. Except for the work of Pan et al. (Citation2020), all other studies focus on a single transfer stop when performing holding decisions. Finally, regarding the objectives of these approaches, the main objective is to increase transfer synchronisation performance and, at the same time, reduce the overall travel time. This is a strong limitation because other important factors, such as the in-vehicle crowding levels and the passenger inconvenience due to skipped stops, are not taken into consideration. An exception again is the work of Pan et al. (Citation2020) that focused on reducing the crowding levels at the transfer stations.
5. Combined control measures
In sections 3 and 4 we reviewed works limited to a single-measure control that applied either vehicle holding or stop-skipping. Most control studies, however, apply a combination of measures to improve passenger transfers as much as possible. In this section, we present past works that combine at least two of the following at-stop or inter-stop control measures: (i) vehicle holding; (ii) stop-skipping; (iii) speed control; (iv) short-turning; (v) rescheduling / dispatching time changes; (vi) interlining; (vii) rerouting; and (viii) limitations of vehicle boardings. The works are categorised based on their solution methods, ranging from mathematical programmes solved with optimisation solvers to dynamic programming, rule-based, and heuristic approaches.
5.1. Mathematical programs
In this subsection, we review works that use mathematical programmes for suggesting combined control measures. Ceder, Hadas, McIvor, and Ang (Citation2013) developed a combined vehicle holding and stop skipping model to reduce the passenger travel times and increase the simultaneous transfers. They first used a microscopic traffic simulator (TransModeler 2.6) to simulate the public transport network and examine the effect of holding and stop-skipping on increasing the number of transfers. Second, they combined holding and skip-stop in a mathematical programme and employed IBM ILOG to solve the optimisation model resulting in the optimal determination of the combination of holding and skip-stop measures. Their case study included three routes with two transfer points from Auckland, New Zealand.
Nesheli and Ceder (Citation2014) and Nesheli and Ceder (Citation2015) proposed a combined holding and stop-skipping approach to minimise the missed transfers of passengers. In their optimisation, they searched for the best combination of holding and stop-skipping tactics after formulating the problem as a mixed-integer mathematical programme. They also performed a simulation using data from Auckland, New Zealand. Their results showed a potential improvement of more than 100% in terms of missed connections and 2%–4% in terms of total passenger travel times compared to the no-control scenario. These works were an extension of Ceder et al. (Citation2013) in terms of adding stop-skipping actions. In addition, Nesheli, Ceder, and Liu (Citation2015) proposed a deterministic nonlinear mathematical programme to minimise the total passenger travel times and maximise the direct transfers. Their model consisted of holding, skip-stop, and short-turn control actions. Finally, Nesheli and Ceder (Citation2016) proposed a combined holding and stop-skipping approach to minimise the missed transfers of passengers. In their optimisation, they searched for the best combination of holding and stop-skipping tactics after formulating the problem as a mixed-integer mathematical programme.
Wu, Liu, and Jin (Citation2016) combined timetable planning with a departure control strategy in case of disruptions. Stochastic travel times were accounted for by the integration of slack times at the planning phase and real-time control. The problem was formulated as a stochastic mixed-integer programming model and solved by a branch-and-bound algorithm.
Manasra and Toledo (Citation2019) proposed an optimisation model to minimise the total travel time of passengers within a prediction horizon. The decision variables were the holding at stops and the speed control when travelling from stop to stop. The model had an efficient formulation and it was solved using the Limited Memory Broyden–Fletcher–Goldfarb–Shanno (L-BGFS-B) algorithm. The case study was the Metronit BRT network in Haifa, Israel.
Ibarra-Rojas, Munoz, Giesen, and Knapp (Citation2019) proposed a nonlinear mixed-integer formulation with time-indexed variables which allow representing the route choice for passengers and different types of costs. Their work considered passenger transfers and determined the frequency for each line, the timetable, the holding times for buses at transfer stops, and passenger-route assignments. Because of the mixed-integer formulation, they implemented an iterative heuristic algorithm and solved a simplified formulation with CPLEX on the transit network in Santiago, Chile. Finally, Yap, Cats, Krasemann, van Oort, and Hoogendoorn (Citation2021) introduced a mathematical programme for retiming (i.e. changing the departure and arrival times), reordering, and rerouting trains. They also developed a methodology that quantifies the disruption propagation from the train network to the urban public transport network using simulations.
5.2. Dynamic programming
Dynamic programming has been used in the past for determining combined control measures. Hadas and Ceder (Citation2008a) developed a dynamic programming model to reduce the total travel time of passengers, including the transfer waiting time. The main focus of their work was to introduce a simulation model to estimate the encounter probability of two buses that have common transfer points. The upper bound of the bus encounter probability was used in the dynamic programming model. Notably, they extended the passenger transfer concept from a single-point encounter at the transfer stop to a road segment encounter (i.e. any point along the road segment was perceived as an encounter point), to improve the probability of successful transfers. This leads to the in-motion transfer concept for future automated modular public transport systems (Ceder, Citation2021; Wu, Kulcsár, & Qu, Citation2021).
Hadas and Ceder (Citation2008b) also proposed a dynamic programming model to improve public transport synchronisations by reducing the total travel times of passengers. Their control measures included holding, stop-skipping and short-turning. In a simulation, they showed an improvement potential of 10% with respect to passenger travel times and 200% with respect to direct transfers. In a later work, Hadas and Ceder (Citation2010) proposed a dynamic programming model for minimising the total travel time consisting of in-vehicle travel time and transfers. Model decisions included vehicle holding, stop-skipping and short-turning. The dynamic programming model was evaluated with simulations on a network with 14 road segments, three bus routes, and a train line.
5.3. Rule-based and tactic-based approaches
Herein, we review works that use rule/tactic-based approaches or pre-determined control strategies. Guevara and Donoso (Citation2014) used micro-simulation, in their case to assess five tactical designs (demand splitting, route differentiation, offline holding, online holding, and prepayment) that are applied locally at a transfer stop and affect only the feeder lines. Their rule-based designs were evaluated with micro-simulation of a high-demand transfer stop of Transantiago, the public transportation system of Santiago de Chile.
Liu and Ceder (Citation2016) proposed a cooperative control strategy, using a set of pre-selected operational tactics (e.g. skip-stop or station, holding, speed changes) to increase the number of synchronised transfers, and reduce passenger transfer times. This optimisation framework was first proposed by Liu, Ceder, Ma, and Guan (Citation2014) and Liu, Ceder, Ma, Nesheli, and Guan (Citation2015) for the synchronisation of transfers in public transport operations. The performance of the rule-based communication-based cooperative control strategy was evaluated in terms of transfer connections, waiting times at transfer stops, vehicle travel times, and the schedule’s punctuality using Monte Carlo simulations.
Nesheli, Ceder, and Gonzalez (Citation2016) proposed also the use of a library of selected operational tactics, including holding and speed control, to reduce the total waiting times of passengers in public transport lines with transfers. Their approach was tested by using the simulation software ExtendSim8 in a bus system of three bus routes in Auckland, New Zealand.
Nesheli, Ceder, Ghavamirad, and Thacker (Citation2017) used tactic-based real-time control to minimise total passenger travel time and maximise direct transfers (without waiting). Their model combined holding, stop-skipping, and the imposing of a boarding limit. In their problem’s objectives, they also considered the environmental-related measure of the global warming potential (GWP).
Finally, Wu, Wang, and Hua (Citation2018) and Wu, An, Wang, Currie, and Hu (Citation2020) further extended the work of Liu et al. (Citation2014) by proposing rule-based control approaches including vehicle holding, stop-skipping, and speed control to improve the reliability of bus operations, including transfers synchronisation.
5.4. Heuristic approaches
Heuristic approaches have been also used to determine combined control measures. Bookbinder and Désilets (Citation1992) assumed a transit network with a number of lines with fixed scheduled headways. In their work, they considered stochastic travel times by employing a simulation procedure in combination with an optimisation model to improve bus transfers. The proposed model was a relaxation of the Quadratic Assignment Problem. It incorporated a wide range of objective functions and a variety of policies for holding buses at a transfer point.
Khoat and Bernard (Citation2006) proposed a model to find new schedules for a transit system of buses after a disturbance. Their main objective was to minimise the waiting time of transferring and non-transferring passengers at stations. Their rescheduling problem considered in-vehicle capacities and it was solved by a metaheuristic (genetic algorithm) in a branch of the bus network in Grenoble, France.
5.5. Approaches that improve transfers without considering them as an objective
Many of the works reviewed do not use control measures that explicitly formulate an objective pertaining to transfer coordination. In these works, the improvement of transfer waiting times is an additional side-benefit, but not the primary objective. One of them is the work of Eberlein et al. (Citation2001) which formulated the holding and dispatching problem as a deterministic quadratic programme (QP). This programme was solved in rolling horizons considering that at the beginning of each rolling horizon the information about the current positions of the buses is updated. To solve the QP, they used a heuristic because the QP was non-convex. Their case study was the MBTA’s Green Line in Boston. Fu and Yang (Citation2002) implemented also two rule-based holding methods: the one-headway-based and the two-headway-based method in a case study using simulations of routes 7C and 7D in the Kitchener–Waterloo area, Ontario, Canada. In their simulations, they showed that their approaches had a secondary benefit of reducing the waiting times at transfer stops.
To summarise, a set of selected methods that propose combined control measures are presented in .
Table 3. Classification of studies on using bus holding for public transport transfer synchronisation.
Holding is one of the combined control measures in most past studies. This underlines the importance of vehicle holding. In addition, vehicle holding, stop-skipping and rescheduling are classical combinations of combined control measures. The same applies for the combination of vehicle holding and speed control which is gaining prominence. Interestingly, unlike the standalone vehicle holding and skip-stop methods, combined methods are mostly applied at the network level allowing potentially for less myopic operations. Their objectives range significantly and some of these approaches consider arrival time uncertainties at the optimisation phase. The two main objectives that are used in most past studies are either the increase in transfer synchronisation related metrics or the reduction of the overall passenger travel times. However, there is a lack of studies on comparing the effects of different control measure combinations. Research in this direction can shed light on whether a specific combination can provide better results than other combinations.
6. Research agenda and an outlook
As evident from the synthesis of the literature, there is an increasing interest in developing strategies for transfer synchronisation that can be applied in real-time. An increasing number of studies is concerned with the joint application of several strategies rather than considering a single strategy. The combination of several strategies – in particular including both intra-stop strategies (e.g. holding, stop-skipping) and inter-stops strategies (e.g. speed adjustment, re-routing) – increases the degrees of freedom a public transport operator has in either speeding-up or slowing-down services with the goal of securing a prospective transfer. Future research may consider also conditional signal priority to allow greater flexibility in control decisions in a connected vehicle environment.
The problem setting under consideration of many (including recent) of the studies included in the state-of-the-art is still confined to a single transfer location, limiting the scalability and applicability of the solutions proposed, and consequently hindering their transfer to practice. Furthermore, only few studies have explicitly addressed the inherent trade-off between single-line performance, often measured in terms of service regularity or punctuality, and multi-line connectivity. Network-wide considerations may embrace a system-wide optimisation of the generalised passenger travel time rather than restricting the design to optimise for a service indicator (e.g. number of missed connections).
While some studies have extended their perspective to consider multiple interchange locations between two lines or even extended their prism to network-level synchronisation, they have not yet fully considered the related network effects for rolling stock circulation, real-time travel information, and passenger flow distribution. The latter requires employing a dynamic passenger assignment model to forecast passengers’ en-route decisions under non-equilibrium conditions. Embedding such dynamic models in real-time control frameworks poses computational challenges and is an important topic for future research.
All of the above-mentioned development outlooks imply greater complexity due to shifting from single strategies to their joint application, from single transfer location to network-wide solutions and the integration of passenger flow forecasting models to account for the impacts of supply adjustments on demand distribution. Such developments can be facilitated by the emergence of artificial intelligence in general, and machine learning techniques in particular. To the best of our knowledge, no study has hitherto deployed machine learning techniques to solve the transfer synchronisation problem. Notwithstanding, in the last few years a variety of machine learning techniques, including reinforcement learning and deep learning, have already been employed for predicting public transport flows (Liu & Chen, Citation2017; Liu, Liu, & Jia, Citation2019), passenger inflow control (Jiang, Fan, Liu, Zhu, & Gu, Citation2018) and developing holding control (Alesiani & Gkiotsalitis, Citation2018; Wang & Sun, Citation2020). These studies pave the way for unlocking the potential of machine learning techniques in the realm of public transport operations and control.
Another game-changer accompanying the rapid development of artificial intelligence is the emergence of big-data. Public transport systems are increasingly equipped with sensors that allow for the passive collection of large amounts of data. While automated vehicle location (AVL) data is commonly available in real-time for public transport fleets, other data sources are either incomplete or only available for offline applications (Van Oort & Cats, Citation2015). In particular, the real-time availability of automated fare collection (AFC) data (most commonly smart card) would greatly enhance the capabilities to develop more accurate estimates of passenger flows. Other relevant sources of information include Wi-Fi and Bluetooth sensors and crowding estimates from surveillance camera at stations or on-board vehicles, as well as information extracted from social media and travel journey planner searches. Methods and techniques to process, mine, fuse and systematically analyse such data sources can yield better forecasts of the impacts of service interventions and hence support better transfer synchronisation decision making.
The performance of control strategies critically depends on the quality of the real-time predictions used for estimating future system states. In the context of transfer synchronisation, control decisions rely on real-time predictions of vehicle movements as well as passenger loads. While the former is well-established, predictions of the latter constitute an emergent field of research. Several passenger flow predictions can be incorporated into the synchronisation problem: (i) the on-board load on the leading vehicle that their destination is downstream of the interchange location; (ii) the number of passengers transferring from the leading vehicle to the connecting vehicle; and (iii) the residual capacity on the connecting vehicle at the interchange location. The increasing availability of automated fare collection (AFC) data in real-time, as well as the rapid deployment of machine learning techniques, pave the way for developing real-time passenger demand predictions. Past works concerned with the short-term prediction of passenger demand estimated the number of boarding passengers (Chen et al., Citation2019; Ma, Xing, Mesbah, & Ferreira, Citation2014) number of alighting passengers (Hao, Lee, & Zhao, Citation2019) and the number of inbound and outbound passengers (Liu et al., Citation2019). Crucially, the accuracy and reliability of such predictions do not guarantee that passenger flows can be adequately estimated. The short-term prediction of passenger load involves linking passengers boarding and alighting locations, either statistically or by means of the related route choice.
The development of travel apps that offer one-stop-shop and Mobility-as-a-Service solutions can facilitate the indication en-route of travellers’ destination and support transfer synchronisation in a manner resembling air travel. The latter is relevant in a low-frequency service context where services’ departures might be delayed to reduce the number of missed transfer connections based on full passenger itinerary information, hence enabling a precise estimate of the number of affected passengers. Moreover, if such services also offer ‘journey time guarantee’ or ‘missed connection insurance’ then economic aspects of synchronisation decisions can be incorporated into the decision making logic.
Emerging developments in service provision models (e.g. mobility-on-demand, shared mobility) and vehicle automation are likely to pose new challenges as well as offer new opportunities for enabling public transport transfer synchronisation. A trend towards flexible services will mean that the transfer synchronisation has to be solved solely in real time, making attempts to coordinate at the tactical level obsolete. First and last mile on-demand services will increase the need for developing one-to-many and many-to-one feeder and distributor synchronisation protocols that can influence not only vehicle dispatching decisions but also algorithms for matching travel requests and rebalancing decisions (Gkiotsalitis, Citation2022). Finally, technological advances in the realm of self-driving vehicles and modular vehicles will further increase the motivation and opportunities for synchronised transfers among shared automated vehicles and mainstream public transport services at single-point or road segment encounters, calling for further research in this field (Ceder, Citation2021; Gkiotsalitis, Schmidt, & van der Hurk, Citation2022). Regarding road segment encounters, it is worth noting that synchronising services along the route has a much higher computational burden because the problem’s domain is a continuous segment instead of discrete points. To alleviate this, an existing practice is to synchronise transfers at only 1 or 2 stops along a shared road segment ((BART), Citation2022). To summarise, and considering the goals of this study as laid out in the introduction section, we propose the following six future research directions:
consider conditional signal priority to allow for greater flexibility with control decisions in a connected vehicle environment;
embrace a system-wide optimisation of the generalised passenger travel time rather than restricting the design to optimise for a service indicator (e.g. number of missed transfer connections);
include rolling stock circulation in future transfer synchronisation models in order to capture supply-side network-effects (e.g. knock-down delays);
include passenger flow distribution in future transfer synchronisation models in order to capture demand-side network-effects (e.g. spill-over);
improve prediction accuracy of passenger loads with the development of new techniques and information sources, such as smartphone apps (Ceder & Jiang, Citation2020);
and re-think transfer synchronisation decisions for shared mobility modes and self-driving vehicles that might require to synchronise services along the route and not at the fixed locations of specific stops.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Abdelhafiez, E. A., Salama, M. R., & Shalaby, M. A. (2017). Minimizing passenger travel time in URT system adopting skip-stop strategy. Journal of Rail Transport Planning & Management, 7(4), 277–290. doi:10.1016/j.jrtpm.2017.11.001
- Alesiani, F., & Gkiotsalitis, K. (2018). Reinforcement learning-based bus holding for high-frequency services. 2018 21st International Conference on Intelligent Transportation Systems (ITSC).
- Anderson, P., & Daganzo, C. (2017). Coordinating transit transfers in real time.
- (BART), B. A. R. T. (2022). System map. Retrieved 3/1/2022 from https://www.bart.gov/system-map
- Bookbinder, J. H., & Désilets, A. (1992). Transfer optimization in a transit network. Transportation Science, 26(2), 106–118. doi:10.1287/trsc.26.2.106
- Ceder, A. A. (2021). Syncing sustainable urban mobility with public transit policy trends based on global data analysis. Scientific Reports, 11(1), 1–13.
- Ceder, A. A., & Jiang, Y. (2020). Route guidance ranking procedures with human perception consideration for personalized public transport service. Transportation Research Part C: Emerging Technologies, 118, 102667.
- Ceder, A., Golany, B., & Tal, O. (2001). Creating bus timetables with maximal synchronization. Transportation Research Part A: Policy and Practice, 35(10), 913–928.
- Ceder, A., Hadas, Y., McIvor, M., & Ang, A. (2013). Transfer synchronization of public transport networks. Transportation Research Record, 2350, 9–16. doi:10.3141/2350-02
- Chen, C.-C., Tsai, Y.-H., & Schonfeld, P. (2016). Schedule coordination, delay propagation, and disruption resilience in intermodal logistics networks. Transportation Research Record, 2548(1), 16–23.
- Chen, C. C., & Schonfeld, P. (2016). A dispatching decision support system for countering delay propagation in intermodal logistics networks. Transportation Planning and Technology, 39(3), 254–268. doi:10.1080/03081060.2016.1142222
- Chen, Q., Wen, D., Li, X., Chen, D., Lv, H., Zhang, J., & Gao, P. (2019). Empirical mode decomposition based long short-term memory neural network forecasting model for the short-term metro passenger flow. PloS one, 14(9), e0222365.
- Chung, E.-H., Mahmoodi Nesheli, M., & Shalaby, A. (2020). Transit holding control model for real-time connection protection. Journal of Transportation Engineering, Part A: Systems, 146(4), 04020021.
- Chung, E. H., & Shalaby, A. (2007). Development of control strategy for intermodal connection protection of timed-transfer transit routes. Transportation Research Record, 2006, 3–10. doi:10.3141/2006-01
- Cook, D. J., Mulrow, C. D., & Haynes, R. B. (1997). Systematic reviews: Synthesis of best evidence for clinical decisions. Annals of Internal Medicine, 126(5), 376–380.
- Delgado, F., Contreras, N., & Munoz, J. C. (2013). Holding for transfers. Transportation Research Board 92nd Annual Meeting.
- Dessouky, M., Hall, R., Nowroozi, A., & Mourikas, K. (1999). Bus dispatching at timed transfer transit stations using bus tracking technology. Transportation Research Part C: Emerging Technologies, 7(4), 187–208. doi:10.1016/S0968-090x(99)00019-4
- Eberlein, X. J., Wilson, N. H., & Bernstein, D. (2001). The holding problem with real–time information available. Transportation Science, 35(1), 1–18.
- Fu, L., Liu, Q., & Calamai, P. (2003). Real-time optimization model for dynamic scheduling of transit operations. Transportation Research Record, 1857(1), 48–55.
- Fu, L., & Yang, X. (2002). Design and implementation of bus–holding control strategies with real-time information. Transportation Research Record, 1791(1), 6–12.
- Gavriilidou, A., & Cats, O. (2019). Reconciling transfer synchronization and service regularity: Real-time control strategies using passenger data. Transportmetrica A: Transport Science, 15(2), 215–243. doi:10.1080/23249935.2018.1458757
- Gkiotsalitis, K. (2019). Robust stop-skipping at the tactical planning stage with evolutionary optimization. Transportation Research Record, 2673(3), 611–623.
- Gkiotsalitis, K. (2021). Stop-skipping in rolling horizons. Transportmetrica A: Transport Science, 17(4), 492–520.
- Gkiotsalitis, K. (2022). Coordinating feeder and collector public transit lines for efficient MaaS services. EURO Journal on Transportation and Logistics, 11, 100057. doi:10.1016/j.ejtl.2021.100057
- Gkiotsalitis, K., & Cats, O. (2021). At-stop control measures in public transport: Literature review and research agenda. Transportation Research Part E: Logistics and Transportation Review, 145, 102176.
- Gkiotsalitis, K., Eikenbroek, O. A. L., & Cats, O. (2020). Robust network-wide bus scheduling with transfer synchronizations. IEEE Transactions on Intelligent Transportation Systems, 21(11), 4582–4592. doi:10.1109/Tits.2019.2941847
- Gkiotsalitis, K., & Maslekar, N. (2018). Towards transfer synchronization of regularity-based bus operations with sequential hill-climbing. Public Transport, 10(2), 335–361.
- Gkiotsalitis, K., Schmidt, M., & van der Hurk, E. (2022). Subline frequency setting for autonomous minibusses under demand uncertainty. Transportation Research Part C: Emerging Technologies, 135, 103492.
- Guevara, C. A., & Donoso, G. A. (2014). Tactical design of high-demand bus transfers. Transport Policy, 32, 16–24. doi:10.1016/j.tranpol.2013.12.004
- Hadas, Y., & Ceder, A. (2008a). Improving bus passenger transfers on road segments through online operational tactics. Transportation Research Record, 2072, 101–109. doi:10.3141/2072-11
- Hadas, Y., & Ceder, A. (2008b). Public transit simulation model for optimal synchronized transfers. Transportation Research Record, 2063(1), 52–59.
- Hadas, Y., & Ceder, A. (2010). Optimal coordination of public-transit vehicles using operational tactics examined by simulation. Transportation Research Part C: Emerging Technologies, 18(6), 879–895. doi:10.1016/j.trc.2010.04.002
- Hall, R., Dessouky, M., & Lu, Q. (2001). Optimal holding times at transfer stations. Computers & Industrial Engineering, 40(4), 379–397. doi:10.1016/S0360-8352(01)00039-0
- Hao, S., Lee, D.-H., & Zhao, D. (2019). Sequence to sequence learning with attention mechanism for short-term passenger flow prediction in large-scale metro system. Transportation Research Part C: Emerging Technologies, 107, 287–300.
- Hu, T. T., Guo, X. C., Xi, Z. P., & Li, J. B. (2015). Research on the methods of holding control strategy for bus. Proceedings of the 4th International Conference on Information Technology and Management Innovation, 28, 481–486. Go to ISI://WOS:000371016400078.
- Ibarra-Rojas, O. J., Delgado, F., Giesen, R., & Muñoz, J. C. (2015). Planning, operation, and control of bus transport systems: A literature review. Transportation Research Part B: Methodological, 77, 38–75.
- Ibarra-Rojas, O. J., Munoz, J. C., Giesen, R., & Knapp, P. (2019). Integrating frequency setting, timetabling, and route assignment to synchronize transit lines. Journal of Advanced Transportation. doi:10.1155/2019/9408595
- Jenq, J. H., Pierce, B., & Pate, A. (2005). Evaluation of the effectiveness of connection protection in improving successful light rail-to-bus transfers. Transit: Intermodal Transfer Facilities, Rail, Commuter Rail, Light Rail, and Major Actvity Center Circulation Systems, 1930, 3–11. Go to ISI://WOS:000235908600001.
- Jiang, Z., Fan, W., Liu, W., Zhu, B., & Gu, J. (2018). Reinforcement learning approach for coordinated passenger inflow control of urban rail transit in peak hours. Transportation Research Part C: Emerging Technologies, 88, 1–16.
- Khoat, N. D., & Bernard, D. G. (2006). Rescheduling in the urban transportation networks. 2006 Imacs: Multiconference on Computational Engineering in Systems Applications, Vols 1 and 2, 953-+. Go to ISI://WOS:000244084600177.
- Kieu, L. M., Bhaskar, A., Almeida, P. E. M., Sabar, N. R., & Chung, E. (2016). Transfer demand prediction for timed transfer coordination in public transport operational control. Journal of Advanced Transportation, 50(8), 1972–1989. doi:10.1002/atr.1440
- Lee, Y. J., Shariat, S., & Choi, K. (2014). Optimizing skip-stop rail transit stopping strategy using a genetic algorithm. Journal of Public Transportation, 17(2), 135–164. doi:10.5038/2375-0901.17.2.7
- Li, D. C., Li, L., Meng, H. D., & Zhang, W. B. (2018). Integrated dynamic transit operation system for multimodal suburban transit. 2018 21st International Conference on Intelligent Transportation Systems (ITSC), pp. 3662–3667. Go to ISI://WOS:000457881303100.
- Liu, L., & Chen, R.-C. (2017). A novel passenger flow prediction model using deep learning methods. Transportation Research Part C: Emerging Technologies, 84, 74–91.
- Liu, T., Cats, O., & Gkiotsalitis, K. (2021). A review of public transport transfer coordination at the tactical planning phase. Transportation Research Part C: Emerging Technologies, 133, 103450.
- Liu, T., & Ceder, A. (2016). Communication-based cooperative control strategy for public transport transfer synchronization. Transportation Research Record, 2541, 27–37. doi:10.3141/2541-04
- Liu, T., Ceder, A., Ma, J. H., & Guan, W. (2014). Synchronizing public transport transfers by using intervehicle communication scheme case study. Transportation Research Record, 2417, 78–91. doi:10.3141/2417-09
- Liu, T., Ceder, A., Ma, J. H., Nesheli, M. M., & Guan, W. (2015). Optimal synchronized transfers in schedule-based public transport networks using online operational tactics. Transportation Research Record, 2533, 78–90. doi:10.3141/2533-09
- Liu, Y., Liu, Z., & Jia, R. (2019). DeepPF: A deep learning based architecture for metro passenger flow prediction. Transportation Research Part C: Emerging Technologies, 101, 18–34.
- Lo, S. C., & Chang, W. J. (2012). Design of real-time fuzzy bus holding system for the mass rapid transit transfer system. Expert Systems with Applications, 39(2), 1718–1724.
- Lo, S. C., Chang, W. J., Kuo, P. C., & Kuo, C. Y. (2009). The simulation of MRT transfer system based on bus holding strategies with platform constraints. 2009 IEEE International Conference on Systems, Man and Cybernetics (SMC 2009), Vols 1-9, pp. 131–136. doi:10.1109/Icsmc.2009.5346562
- Ma, Z., Xing, J., Mesbah, M., & Ferreira, L. (2014). Predicting short-term bus passenger demand using a pattern hybrid approach. Transportation Research Part C: Emerging Technologies, 39, 148–163.
- Manasra, H., & Toledo, T. (2019). Optimization-based operations control for public transportation service with transfers. Transportation Research Part C: Emerging Technologies, 105, 456–467. doi:10.1016/j.trc.2019.06.011
- Nesheli, M. M., & Ceder, A. (2014). Optimal combinations of selected tactics for public-transport transfer synchronization. Transportation Research Part C: Emerging Technologies, 48, 491–504. doi:10.1016/j.trc.2014.09.013
- Nesheli, M. M., & Ceder, A. (2016). Use of real-time operational tactics to synchronize transfers in headway-based public transport service. Transportation Research Record, 2539, 103–112. doi:10.3141/2539-12
- Nesheli, M. M., & Ceder, A. A. (2015). Improved reliability of public transportation using real-time transfer synchronization. Transportation Research Part C: Emerging Technologies, 60, 525–539.
- Nesheli, M. M., Ceder, A. A., & Liu, T. (2015). A robust, tactic-based, real-time framework for public-transport transfer synchronization. Transportation Research Procedia, 9, 246–268.
- Nesheli, M. M., Ceder, A., Ghavamirad, F., & Thacker, S. (2017). Environmental impacts of public transport systems using real-time control method. Transportation Research Part D: Transport and Environment, 51, 216–226. doi:10.1016/j.trd.2016.12.006
- Nesheli, M. M., Ceder, A., & Gonzalez, V. A. (2016). Real-time public-transport operational tactics using synchronized transfers to eliminate vehicle bunching. IEEE Transactions on Intelligent Transportation Systems, 17(11), 3220–3229.
- Pan, H. C., Yu, J., Liu, Z. G., & Chen, W. J. (2020). Optimal train skip-stop operation at urban rail transit transfer stations for nonrecurrent extreme passenger flow mitigation. Journal of Transportation Engineering Part A: Systems, 146(7). doi:10.1061/Jtepbs.0000355
- Sáez, D., Cortés, C. E., Milla, F., Núñez, A., Tirachini, A., & Riquelme, M. (2012). Hybrid predictive control strategy for a public transport system with uncertain demand. Transportmetrica, 8(1), 61–86.
- Sun, F., Zhu, W. T., Ye, Y., & Wang, D. H. (2013). Optimal skip-stop schedule under mixed traffic conditions for minimizing travel time of passengers. Discrete Dynamics in Nature and Society, 2013. doi:10.1155/2013/930562
- Sun, Y., & Schonfeld, P. (2016). Holding decisions for correlated vehicle arrivals at intermodal freight transfer terminals. Transportation Research Part B: Methodological, 90, 218–240.
- Ting, C. J., & Schonfeld, P. (2007). Dispatching control at transfer stations in multi-hub transit networks. Journal of Advanced Transportation, 41(3), 217–243. doi:10.1002/atr.5670410302
- Van Oort, N., & Cats, O. (2015). Improving public transport decision making, planning and operations by using big data: Cases from Sweden and the Netherlands. 2015 IEEE 18th international conference on intelligent transportation systems.
- Wang, J., & Sun, L. (2020). Dynamic holding control to avoid bus bunching: A multi-agent deep reinforcement learning framework. Transportation Research Part C: Emerging Technologies, 116, 102661.
- Wu, J., Kulcsár, B., & Qu, X. (2021). A modular, adaptive, and autonomous transit system (MAATS): An in-motion transfer strategy and performance evaluation in urban grid transit networks. Transportation Research Part A: Policy and Practice, 151, 81–98.
- Wu, W. T., Liu, R. H., & Jin, W. Z. (2016). Designing robust schedule coordination scheme for transit networks with safety control margins. Transportation Research Part B: Methodological, 93, 495–519. doi:10.1016/j.trb.2016.07.009
- Wu, Z., An, K., Wang, W., Currie, G., & Hu, X. (2020). Comprehensive approach to transfer synchronization in public transit. Journal of Transportation Engineering, Part A: Systems, 146(4), 04020017.
- Wu, Z. J., Wang, W., & Hua, X. D. (2018). Improving bus operation reliability using real-time tactics. 2018 3rd International Conference on Smart City and Systems Engineering (Icscse), pp. 679–682. doi:10.1109/Icscse.2018.00146
- Yang, A. N., Huang, J. L., Wang, B., & Chen, Y. Y. (2019a). Train scheduling for minimizing the total travel time with a skip-stop operation in urban rail transit. IEEE Access, 7, 81956–81968. doi:10.1109/Access.2019.2923231
- Yang, S., Wu, J., Yang, X., Liao, F., Li, D., & Wei, Y. (2019b). Analysis of energy consumption reduction in metro systems using rolling stop-skipping patterns. Computers & Industrial Engineering, 127, 129–142.
- Yap, M., Cats, O., Krasemann, J. T., van Oort, N., & Hoogendoorn, S. (2021). Quantification and control of disruption propagation in multi-level public transport networks. International Journal of Transportation Science and Technology. doi:10.1016/j.ijtst.2021.02.002