

Abstract
This paper describes a novel stair-climbing wheelchair operated by human upper body using lever propelled rotary-legs with posture transition mechanism. The design principle of this wheelchair is to make use of the user's latent upper body capability, with appropriate mechanisms to enable extended functionality of the regular wheelchair without the need of heavy, expensive mechanisms or electric motors. An arm-operated mechanism allows the user to overcome steps and stairs independently without any external power source. The developed wheelchair consists of manual wheels with casters for planar locomotion, which provides capabilities equivalent to a regular manual wheelchair. In addition, the wheelchair has a rotary-legs mechanism based on lever propulsion control for climbing stairs. It also has a passive mechanism powered by gas springs for posture transition to shift the user's center of gravity between two positions for planar locomotion and for stair-climbing. The proposed design consists of only passive components, which makes the wheelchair more compact and lightweight. In this paper we describe in detail the development of this wheelchair and an investigation of how users can climb stairs independently. We also present evaluation experiments with a healthy participant and a dummy to investigate the feasibility of the proposed design.
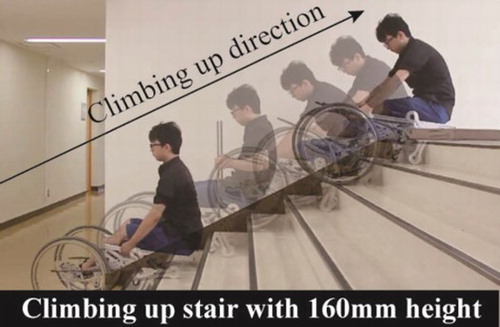
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Kai Sasaki
Kai Sasaki received the Ph.D. degree in Empowerment informatics, school of integrative and global majors from University of Tsukuba, Japan, in 2020. His research interests include physically assistive devices, human-centered robotics and automation.
Yosuke Eguchi
Yosuke Eguchi received the Ph. D. degree in Engineering systems and information engineering from university of Tsukuba, Japan, in 2019. His research interests include development of innovative mechanical systems for wearable assistive devices to enhance mobility of patients with motor impairment.
Kenji Suzuki
Kenji Suzuki received the Ph.D. degree in pure and applied physics from Waseda University, Tokyo, Japan, in 2003. He is currently a full Professor with the Center for Cybernics Research and the principal investigator of Artificial Intelligence Laboratory, University of Tsukuba, Japan. His research interests include wearable robotics and devices, affective computing, social robotics, and assistive robotics. He is a member of IEEE and ACM.