

Abstract
This article describes a wearable sensor for monitoring the motion of human elbow and wrist joints. The sensor converts the joint motion angle into a displacement, which is monitored using a fiber-optic sensor based on reflective light intensity modulation. A mathematical model is established, and the potential influencing factors of the sensor are investigated. Two prototypes for elbow and wrist joint angle monitoring are fabricated and validated. The experimental results indicate that the proposed sensor has a measurement range of 0–60° (0–120°), with a resolution of 0.338° (3.6°) for monitoring the wrist joint palm flexion (elbow joint flexion). The proposed sensor has the potential to be used for rehabilitation purposes and monitoring of joint angles while performing reaching tasks, which are the most common upper-limb gestures.
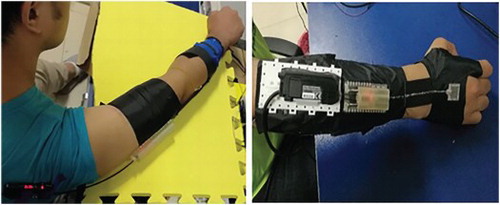
GRAPHICAL ABSTRACT
Acknowledgment
We thank the participants of the experiments.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Min Li
Min Li received her B.Sc. degree in mechanical engineering and her M.Sc. degree in agricultural mechanization engineering from Northwest A&F University, China, in 2007 and 2010, respectively, and the Ph.D. degree in robotics from King’s College London in 2014. From 2015 to 2017, she was a Lecturer with the School of Mechanical Engineering, Xi’an Jiaotong University, China. She is currently an Associate Professor with Xi’an Jiaotong University. Her research interests include haptic feedback for robots, soft robots and rehabilitation robots.
Bo He
Bo He received his B.S. Degree in Mechanical Engineering from Yanshan University of China in 2016. He is currently pursuing the Ph.D. degree from the school of Mechanical Engineering in Xi’an Jiaotong University. His research interests include rehabilitation robot and human motion detection.
Xingang Zhao
Xingang Zhao received the B.E. and M.E. degrees in mechanics from Jilin University, Changchun, China, in 2000 and 2004, respectively, and the Ph.D. degree in pattern recognition and intelligent systems from the Chinese Academy of Sciences, Shenyang, China, in 2008. From 2015 to 2016, he was a Visiting Scientist with the Rehabilitation Institute of Chicago, Chicago, IL, USA. He is currently a Professor with the State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences. His main research interests include rehabilitation robots, robot control, and pattern recognition.
Jun Xie
Jun Xie received the B. Sc. Degree in mechanical engineering and the M.Sc. degree in fluid machinery and engineering from the Hefei University of Technology, China, in 2004 and 2007, respectively, and the Ph.D. degree in instrument science and technology from Xi’an Jiaotong University, China, in 2013. Since 2017, he has been an Associate Professor with the School of Mechanical Engineering, Xi’an Jiaotong University. His research interests include brain signal processing and brain-computer interface.
Wei Yao
Wei Yao received the Ph.D. degree in robotics in 2007. Previously, he was a Postdoc Research Fellow at King’s College London for a project of developing an MRI compatible steerable robotic catheter system for cardiac catheterization. Before he moved to King’s College, he worked for two years in the Department of Surgery and Cancer at Imperial College London, carrying on research into robotics for minimally invasive surgery. Currently, he is a Lecturer in medical robotics in the Department of Biomedical Engineering, University of Strathclyde, Glasgow, U.K. His research focuses on developing a number of cutting-edge and multi-discipline robotic technologies by integrating mechatronics, sensing, control, medical imaging and robotic navigation for the next generation of surgery and rehabilitation.
Guanghua Xu
Guanghua Xu received the B.Sc. and M.Sc. degrees and the Ph.D. degree in mechanical engineering from Xi’an Jiaotong University, Xi’an, China, in 1986 and 1995, respectively. He is current a Professor of Mechanical Engineering with Xi’an Jiaotong University. His research interests include biomedical signal processing, brain-computer interface, rehabilitation robot, and condition monitoring and fault diagnosis.