

ABSTRACT
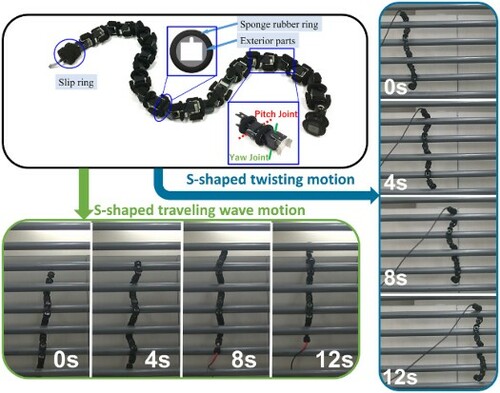
We propose two motions for a snake robot to move through crowded pipes. One motion is an S-shaped twisting motion performed by the snake robot as it moves around crowded pipes in parallel to the pipes. To develop the shape of the snake robot, the S-shaped twisting motion creates large and small semicircles alternately. In the S-shaped twisting motion, lateral rolling is used to generate the robot's twisting motion along its body to maneuver among crowded pipes. The other motion is an S-shaped traveling wave motion used by the snake robot to move among crowded pipes perpendicularly to the pipes. The S-shaped traveling wave motion adds a hyperbolic shape to the snake robot by utilizing a hyperbolic function. The shape of the hyperbolic function produces a little wave in the S-shaped traveling wave motion, and the wave is transferred from the tail to the head to move ahead. In this study, we describe the design of these two motions and exhibit the results of trials in simulation and with a real snake robot to validate the effectiveness of our proposed snake robot's motion.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Yongdong Wang
Yongdong Wang received the B.S. degree in Engineering from the Department of College of Mechanical Engineering at the Inner Mongolia University for the Nationalities, Inner Mongolia, China, in 2017. And the M.S. degree in the Graduate School of Interdisciplinary Science and Engineering in Health Systems at the Okayama University, Okayama, Japan, in 2020. He is currently working toward the Ph.D. degree with the Graduate School of Interdisciplinary Science and Engineering in Health Systems at Okayama University. His research interests include biologically inspired robotics, artificial intelligence, and dynamic modeling of redundant systems.
Tetsushi Kamegawa
Tetsushi Kamegawa received the B.S., M.S., and Ph.D. degrees in engineering from Tokyo Institute of Technology, Japan, in 1999, 2001 and 2004, respectively. In 2004 he was a visiting scholar of Roma University, Italy. From 2004 to 2006 he was a researcher at International Rescue System Institute, Japan. From 2006 to 2019 he worked as a research associate, assistant professor and senior assistant professor at the Okayama University, Japan. He was also a visiting researcher of Carnegie Mellon University in 2012. He became an associate professor of Faculty of Interdisciplinary Science and Engineering in Health System, Okayama University in 2020. His research interests include snake robots, rescue robots and medical robots. He is a member of the JSME, RSJ, SICE.
Eriko Matsuda
Eriko Matsuda received the B.S. degree in Engineering from the Department of College of Mechanical System Engineering at the Okayama University, Okayama, Japan, in 2016. And the M.S. degrees in the Graduate School of Interdisciplinary Science and Engineering in Health Systems at the Okayama University in 2018. She is currently an engineer at Murata Manufacturing Co., Ltd.
Akio Gofuku
Akio Gofuku received the B.S., M.S., and Ph.D. degrees in electrical engineering from Kyoto University, Japan, in 1981, 1983 and 1990, respectively. He was an assistant professor of the Institute of Atomic Energy, Kyoto University between 1984 and 1994. He was also a visiting researcher of Technical University of Denmark from 1993 to 1994. In December 1994, He moved to Department of Mechanical Engineering, Okayama University, Japan as an associate professor. He became a professor of Department of Systems Engineering, Okayama University in 1998. He is currently a professor of Graduate School of Interdisciplinary Science and Engineering in Health Systems, Okayama University. His research interests include human-machine interfaces, medical support systems, and spherical motors. He is a member of AESJ, JSME, HIS, ISCIE, SICE, etc.