
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
This paper is Part II of a study of the effects of practice on young adult novice gymnasts learning the movement coordination pattern of the longswing. The focus was the early stage of learning a critical component of the longswing, namely: through joint motion to inject mechanical energy into the upswing segment effectively to complete the longswing circle. Twenty-five novice male gymnasts received expert instruction while practicing two sessions a week for 3 weeks between a pre- and a post-practice assessment test trial. Seven novices completed a full circle by the end of Test 4. Completion of the longswing was positively related to the angular velocity generated in the gravity driven free fall of the initial segment and the greater rate of energy input in the upward segment. A successful performance in terms of the emergent movement pattern requires coordination of the onset, rate and level of energy input to counterbalance the negative influence of gravity on the second half upwards segment. The development of the complete longswing through the emergence of the collective variable dynamics (Paper 1) and biomechanical energetics of the gymnast (Paper 2) informs coaches, scientists and clinicians regarding task decomposition and learning the longswing.
This paper is Part II of a study of the effects of practice on young adult male novice gymnasts attempting to learn the movement coordination pattern of the high bar longswing. Part I emphasised the early stage of learning from the perspective of the emergence of the macroscopic properties of the movement pattern of the longswing and an examination of candidate collective variable(s) for the task in a dynamical systems perspective (Kelso, Citation1995; Newell & Liu, Citation2020). Here we present a detailed analysis of novice gymnasts learning the most critical component of the longswing circle, namely: to inject mechanical energy into the upswing segment effectively and efficiently so as to complete the full longswing circle. The energy input from joint action, particularly neuromuscular activity at the hips and/or shoulders, is critical because the radial angular velocity generated alone from the free fall of the handstand due to gravity in the downward segment (0–180°) although substantial is not sufficient to complete the subsequent upwards antigravity segment (180–360°) (Okamoto et al., Citation1987, Citation1989).
There have been a number of biomechanical analyses of the longswing: kinematics (e.g., Irwin & Kerwin, Citation2005; Williams et al., Citation2012); kinetics (e.g., Arampatzis & Brüggemann, Citation1998) and energetics (e.g., Irwin & Kerwin, Citation2007, Citation2006). Biomechanical models of the longswing have also been developed (e.g., Yeadon & Hiley, Citation2000). These experimental and modelling studies have primarily been on elite level gymnasts examining what is tacitly assumed to be a champion’s biomechanical template of elite level skill in the longswing (although see Busquets et al., Citation2013a, Citation2013b). It has been shown that the energy input takes place in what has been called the functional phase (Irwin & Kerwin, Citation2005) that is between ~170 and270° depending on the age and gymnastic skill level of the participants (Williams et al., Citation2012).
The longswing is typically only seen and practiced in the context of the artistic gymnastics discipline, although the circus is another venue. Task decomposition reveals, however, that a sequence of longswing holds some similar dynamical properties to the seemingly unrelated tasks of: a baby’s bouncing harness (Goldfield et al., Citation2003), a child’s swing (Curry, Citation1976); and the hula hoop (Balasubramanian & Turvey, Citation2004). Indeed, these tasks all involve the timing of an impulse to the movement system dynamics to sustain the respective rhythmical motion which is a hallmark characteristic of a forced oscillator model (Strogatz, Citation2018). Thus, the biomechanical and dynamical issues inter-twined here to investigate novices learning to form the movement coordination pattern hold potential generality to a number of perceptual-motor skills and are not specific or applied only to sport skills. Indeed, the study of skill in sport can in many contexts be either applied or basic research depending on the question being asked.
The timing and level/rate of the energy input we hypothesise is dependent in part on the radial angular velocity generated in the free fall segment from 0 to 180°. The lower the momentum generated in gravity free fall the greater the energy input required in the functional phase to complete the longswing circle. Indeed, we examine if there is adaptive compensatory behaviour within-trial between radial angular velocity from the downward falling motion and the timing and level of energy input in the upward second half segment of the longswing. Initial radial angular velocity could be decreased by the shortening of the body as a lever (reducing moment of inertia) through hip and knee flexion (Bauer, Citation1983) – a strategy more likely in the novice gymnast (Readhead, Citation1997). There may also be an influence of friction though hand grasping of the bar (Irwin & Kerwin, Citation2006).
The discrete burst of mechanical energy input in the functional phase is represented here by 3 energy-related variables: location of the initiation of the energy burst on the CM trajectory; peak energy input; and average rate of energy input (Arampatzis & Brüggemann, Citation2001; Irwin & Kerwin, Citation2006). These variables were investigated with regard to their relation to the angular momentum and radial angular velocity generated at key landmark points around the longswing cycle. We also examined whether the energy burst in each trial was related to hip and/or shoulder joint work. It has been shown that novice gymnasts tend to predominantly use hip flexion for energy input whereas experienced skilled gymnasts tend to flex the shoulders (Williams et al., Citation2015b). A related point of interest was to identify through the individual patterns of energy input why some novices fail to complete the longswing circle while others are successful in this initial phase of getting the idea of the task (see paper I).
In summary, the study examined several hypotheses for learning the initial stage of the longswing that were advanced in part from a decomposition of the biomechanics and dynamics of the task . The first hypothesis was that the location of the energy input on the CM trajectory will with practice shift from around the 180° minimum location towards the 270° mark. Second, the energy burst variables in the functional phase will be related to the radial angular velocity generated through gravity in the 0–180° segment of the circle. In particular, we examined whether there was a negative correlation through compensatory action between angular velocity at the 180° and the amount and location of the energy input in the initial upward segment (180–270°). Third, and parallel to the companion paper on behavioural movement organisation that there are individual pathways of change over practice by the novice gymnasts in the relations of the radial angular velocity and energy input variables. Fourth, that there will be increased between-participant variability in trajectory properties of the CM reflecting the transitions of control processes at a few regions of the trajectory: namely, ~ 180–210°, and at the completion of the circle at ~360°.
Methods
Participants
The same novice young adult male gymnast participants (N = 25) reported in Part I (Irwin et al., Citation2021)
Data collection
The same experimental procedures (apparatus, practice conditions, instruction) as reported in Part I Irwin et al. Citation2021. Joint kinetics were calculated through the application of inverse dynamics. The novice gymnast was biomechanically modelled as a pin-jointed four-link system comprising arms, trunk, thighs, and shanks. The known forces at the Toes were used to calculate the internal joint forces and moments at the knees, hips and shoulders (as used by Irwin et al., Citation2014; Kerwin & Irwin, Citation2010). Muscle power (MP) was calculated as the product of the muscle moment and angular velocity providing a measure of the rate of work done. The muscle work was calculated from the time integral of the muscle power profiles for each joint, enabling the total muscle work throughout each movement to be calculated. Muscle moments, powers, and work done at the shoulders, hips, and knees were quantified.
Data analysis
The analysis focused on the energy input from the novices represented as the work done at the shoulders, hips, and knees. The total biomechanical energetic processes of the gymnast (Egymnast) performing the longswing were calculated using the relationship shown in (Equation (1)).
Critical biomechanical energetic variables from Egymnast were the focus of these analyses that included maximum energy (Emax, J), rate of energy input (Erate, Js−1), angular position (θEmax, °), and angular velocity (ωEmax°) of the gymnast when Emax occurs. For the participant in the handstand position on top of the bar, the angle between his centre of mass (CM) and the bar was set at 0°. To compare within- and between-trials all data sets were interpolated in 1° intervals from 0° to 360° using a cubic “lspline” function (Mat Lab). Variability was calculated as the standard deviation of the respective variables (see Irwin & Kerwin, Citation2005, Citation2007).
Statistical analysis
All statistical analyses were performed on SPSSN v2.3 (SPSS Corporation, USA). The data showed that three clusters of participants emerged based on their swing height performance level during the final testing day; Group 1: 346–360° (n = 7), Group 2: 291–316° (n = 10), and Group 3: 263–283° (n = 8).
Following checks for normality (normality was assessed using Kolmogorov-Smirnov, homogeneity of variance and sphericity were also checked) a repeated measures ANOVA (3 groups × 4 testing days) was performed on each of the variables of the continuous relative phase profile shown in . In order to assess the relationship between the dependent variable θMaxcircle, and the critical biomechanical energetic variables a step-wise multiple regression was performed. The step wise multiple regression analysis identified those variables most related to the criterion variable of swing height. In addition, pairwise correlations were performed between all the variables. A Bonferroni correction was used and statistical significance was set to p = 0.05. Effect sizes were calculated via partial eta squared (ηp2; small >0.01, medium >0.05, large >0.14 (Cohen, Citation1973; Strutzenberger et al., Citation2020)).
Results
Energy input
The biomechanical energetic analysis focused on the mechanical energy input into the system with specific reference to three critical energy-related variables: namely, maximum energy input (Emax, J), rate of energy input (Erate, Js−1) and the angular position (θEmax, °) and velocity (ωEmax, rads−1), of the gymnast when Emax occurred ().
Figure 1. Group average of critical biomechanical energetic variables about the bar during testing sessions 1, 2, 3, and 4. Energetic variables include maximum energy input (Emax, J), rate of energy input (Erate, Js−1), angular position (θEmax, °), and angular velocity (ωEmax, °s−1) when Emax occurs
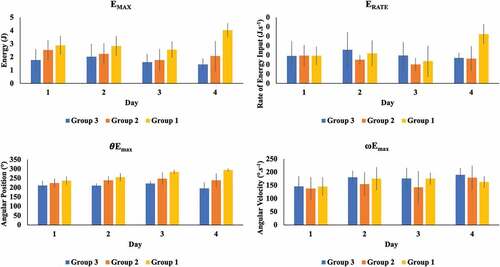
The key variable of maximum energy (Emax, J) input showed a significant effect for testing days (F (3, 66) = 3.35, p < 0.05, ηp2 = 0.132) with a corresponding large effect size. Following the initial testing session, Groups 1 and 2 significantly increased the magnitude of the energy from the gymnast into the system. By the final testing session, Group 1 had a significantly higher Emax than the other two groups (p < 0.05).
The rate of energy input (Erate, Js−1) that the gymnast put into the system showed a significant effect for testing days (F (3, 66) = 3.92, p < 0.05, ηp2 = 0.151) and group (F (2,22) = 4.26, p < 0.05, ηp2 = 0.279). A significant interaction between group and testing day was also found, F (6, 66) = 3.86, p < 0.05, ηp2 = 0.260. Large effect sizes were observed with each F ratio. The analysis of simple main effects showed similarity between the groups across the first three sessions (p > 0.05); however, by the final testing session the rate of energy being input into the system by the participants was significantly greater for group 1 compared to groups 2 and 3, reflecting that the more successful performers had a higher rate of energy input.
The final biomechanical energetic variable considered was the angular position of the gymnast when Emax occurs (θEmax, °). There was a significant effect for testing days (F (3, 66) = 6.93, p < 0.05, ηp2 = 0.240), and group (F (2,22) = 16.18, p < 0.05, ηp2 = 0.595). Additionally, a significant interaction between group and testing day was also found, F (6, 66) = 4.71, p < 0.05, ηp2 = 0.300, with large effect sizes observed for all tests of difference. Similar to the other key variables θEmax showed no difference between the groups at the initial testing session. However, there was an increase in angular position around the bar where Emax occurred as the testing sessions progressed. Groups 2 and 3 showed a significantly later position for Emax (p < 0.05), and at session 4 Group 3 had progressed even further.
The radial angular velocity of the CM about the bar at Emax (ωEmax, °s−1) showed a significant effect for testing days (F (3, 66) = 3.35, p < 0.05, ηp2 = 0.132), and group (F (2,22) = 6.12, p < 0.05, ηp2 = 0.218, with large effect sizes in both independent variables. No significant interaction between group and testing day was observed. A key observation was that ωEmax was not different at testing Day 1 between the groups. Group 1 had a significantly higher ωEmax compared to group 2 at testing Day 2 and Day 3.
Joint kinetics
The average total work done by the gymnasts over the whole trial and across each testing day was highest for group 1 (2.8 ± 0.4 J/kg) compared to group 2 (2.5 ± 0.1 J/kg) and group 3 (2.0 ± 0.3 J/kg). The distribution of this work across the knees, hips and shoulders is shown in . It is interesting to note the significantly larger contribution that the hip joint makes across the groups and days, equating to approximately 60% of the work, followed by the shoulders on average 30% and the knees on average 10% (p < 0.05). In addition to the relative musculoskeletal contribution, the timing of the peak joint torques () shows a sequencing of the kinetic chain, i.e., hips peaking first followed by the shoulders. shows the percentage contribution for each group (1–3) for each testing day. provides an example of the continuous changes in the joint work profiles over the training period with clear evidence of between-participant variation in terms of continuous joint contributions from the knees, hips, and shoulders throughout the swing.
Figure 2. Average percentage (%) contribution to total joint work from the knees (KW, green), hips (HW, red), and shoulders (SW, blue) during testing days 1–4, for groups: 1, 2, and 3
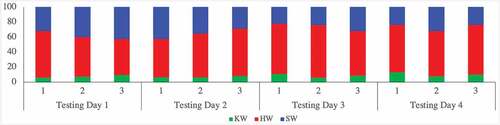
Figure 3. Joint work at the knees, hips and shoulders during testing sessions 1–4, for one participant from group 1 (top row) and one participant from the least successful group 3 (bottom row). Knees = green, Hips = Red, Shoulders = Blue
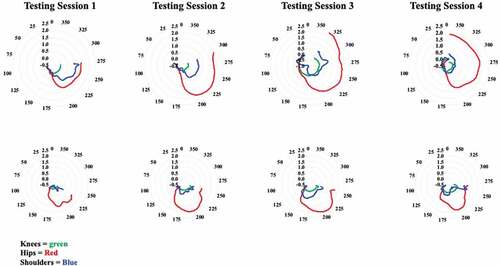
The data in and show a continuous work contribution from the joints and there is a shift later around the circle for peak joint work. This was reflected in where θEmax was significantly further around the circle when maximum energy was input.
Correlation of key variables using individual trial data
Multiple stepwise regression was used to examine the relationship between the criterion variable of swing height (θMaxcircle) and the key biomechanical energetic variables (Egymnast, Emax, Erate, θEmax, ωEmax,), in addition to, the radial angular velocity of the CM about the bar at 90° (ω90°) and 180° (ω180), see .
Table 1. Multiple stepwise regression with maximum swing height (θMaxcircle) as the criterion variable (each model relates to a specific testing day)
Across all testing days one of the key variables that correlated with swing height (θMaxcircle) was ω90° (p < 0.05), that increased in terms of its percentage contribution (). Day 2 showed the importance of the radial angular velocity of the CM about the bar, with a significant contribution from both ω90° and ω180°. In addition, the maximum energy the performer produced (Emax) significantly correlated to swing height during testing days 1 and 3, with the rate of Energy input being significantly correlated on day 4.
Table 2. Multiple stepwise regression coefficients, constant and Beta (B). θcircle as the criterion variable and each model relates to a specific testing day
Correlation analysis
Linear correlations were examined between all the dependent variables as a function of testing day to observe the strength of these pairwise relationships. shows these relations in a correlation matrix based on all of the participants for testing days 1 and 4.
Table 3. Linear regression matrix of the key energy variables associated with swing height
The relationship between Emax and θEmax showed a significant positive correlation on both day 1 and day 4, suggesting a higher swing height at which energy was input via the gymnast’s muscular work. An inverse relationship was observed between ω@Emax and Emax and between ω@Emax and θEmax respectively at testing days 1 and 4. These negative correlations highlight the interaction of the kinetic variables of the gymnast’s muscular work and angular velocity of the CM about the bar. The energy input and the rate at which the gymnast is circling around the bar showed a compensatory relation.
Discussion
Our project examined the initial practice sessions of the early stage of young male novice gymnasts learning to perform the high bar longswing. The companion paper Part I (Irwin et al., Citation2019) investigated the macroscopic qualitative properties of the emerging movement form of the longswing circle. Here in Part II, we investigated the important functional phase of the skill (Irwin & Kerwin, Citation2005) and, in particular, the input of mechanical energy by the novice gymnast to enhance the radial angular velocity generated from the initial ~ 180° free fall of the circle so as to increase the probability of completing the upwards segment (final ~0°) of the circle against gravity.
The high bar longswing is a basic skill in men’s artistic gymnastics that cannot be completed from the energy of the initial free fall segment alone, thus giving functional significance to the energy input by the gymnast to complete the circle. The energy input has a number of practical and theoretical implications for the longswing and the learning of perceptual-motor skills more generally. The experimental findings in our two papers have also provided information to update our initial working functional model of the longswing. The model is based on the relative phase of the performer’s CM and bar, together with the biomechanical energetic input, that was previously highlighted as important in the coordination and control of the longswing (Irwin et al., Citation2019).
Inserting/withdrawing energy into the system
The initial 0–180° segment of the longswing is dominated by the positive influence of gravity supporting what is in effect a free-falling action from a handstand on the bar. However, the initial fall radial angular velocity in the very early trials of practice was slower in the poorer performing novices. This could be through the contribution of increasing friction in holding the bar (Irwin & Kerwin, Citation2006) or the primary contribution from adjusting the configuration of the body and resulting moment of inertia of the system (Readhead, Citation1997). The findings showed that the radial angular velocity of the novice gymnasts free falling in the 0–180° tended to increase with practice and was higher in the successful trials ().
During the initial practice sessions all the novice gymnasts are at a disadvantage because of the lower radial angular velocity generated in the falling phase. As practice progressed the more successful gymnasts (Group 1) were able to exploit the gravitational force during the free fall in the initial half of the circle and enhance the timing of the energy input through joint motion. These components reflect the two major processes that enable a complete longwing circle. Tuning the energy input in the final segment of the cycle (~ 270–360°) can occur as needed where the gymnast is augmenting the previously gained radial angular velocity to complete the circle.
The CM dynamics illustrated in and presented in Paper 1 (Figure 5), however, are consistent with the findings of Vicinanza et al. (Citation2018). This is the region of the longswing where the novice gymnast is putting energy back into the system so as to ensure that the body has sufficient radial angular velocity to complete the full longswing cycle. Our detailed analysis of energy input provides strong evidence for the significant role of this control phase to completion of the longswing circle. Importantly, it was found that the rate and location of energy input were key variables in the completion of the circle.
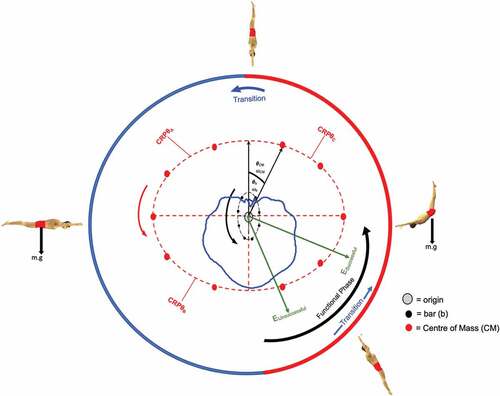
Figure 4. Diagrammatic representation of the successful novice, continuous, longswing with the gymnast rotating anti-clockwise about the bar. The two-phase model blue semi-circle (exploiting free fall) and red semi-circle (energy Input) are interspersed a two transition 1. during the handstand phase and 2 during the energy input phase. The functional phase is highlighted and representative of energy input (E) for unsuccessful and successful novice longswing is illustrated by green arrows. The candidate collective variable: Continuous relative phase of the bar – centre of mass interaction is shown by the red dashed line. CRPθA (initiation of first out of phase sequence); CRPθB (initiation of second out of phase sequence) and CRPθC (end of second out of phase sequence). CM dynamics (blue line: Radial angular velocity of CM) of a successful participant (P05) from the current study
The findings showed that with practice the location in the cycle of the initiation of energy input moved from prior to or around the minimum (180°) to after the minimum of the circle. It was also evident that “failure” trials (those that did not complete the full circle) were associated with slower angular velocity in the 0–180° segment and with early in the 2nd quartile cycle energy input. In contrast, the complete “successful” trials tended to initiate energy input progressively higher up the 3rd quartile, a finding congruent with Williams et al. (Citation2015b). The successful novices of group 1 also inserted more energy at a higher rate and later in the circle, than the unsuccessful novices where this effort was in effect wasted due to lack of coordination with the ongoing dynamics of the CM.
The individual dynamics revealed as a function of practice time suggests that there potentially is considerable degeneracy (Edelman & Gally, Citation2001) in the energy input variables as to location in the cycle, the rate of energy input and the duration of maintaining energy input that realise a complete cycle or successful trial. Decomposing the contribution of energy related variables to sustain the upswing has shown where in the CM trajectory the energy insert is initiated is critical. The importance of the rate of energy is also highlighted in the multiple regression with its significant relation to the longswing on the final testing day.
The findings also showed that novices through practice shifted the energy input from either just before the minimum of the circle to inserting later in the initial upwards segment of the second half of the circle. This is consistent with previous findings that participants inject energy via the hip or shoulder motion that is typically in the lower upward segment of the circle dynamics (Arampatzis & Brüggemann, Citation1998; Irwin & Kerwin, Citation2007). It has been shown that novices tend to input energy via flexion of the hips whereas elite gymnasts tend to use shoulder action for energy input (Williams et al., Citation2015b). The joint kinetics of the novice gymnasts here were significantly greater at hips, compared to the shoulders and knees (p < 0.05).
The correlation analysis showed that there was a small but significant compensatory relation between circular angle at which the energy input was initiated and radial angular velocity at 270°. Additionally, the sequencing of the timing of the peak joint torques showed a knees to hips to shoulders order. This suggests a departure from the classic proximal to distal sequencing (Putnam, Citation1991) potentially due to the task being an open chain rotating about a fixed point. These joint motion sequences have been reported previously during the elite longswing (Irwin & Kerwin, Citation2006, Citation2007). An open challenge to be addressed is whether the proximal to distal sequence is anatomically based or task driven.
A final point to be noted on the energetics of the longswing is that the standard instructional training method used here of initiating novice practice trials by swinging below the bar to attain position above the bar perhaps contributes to a lower initial position for fall initiation in the circle than would be attained from a handstand. Thus, this safety precaution in training would likely lead to reduced radial angular velocity from the free fall phase and the resulting reduced momentum makes the task more difficult for the beginner. This negative bias to training conditions is justified on safety grounds and worth the wait of bringing the handstand into the task.
A functional model of the longswing
In we show an updated schematic of the working functional model of the longswing proposed in Part I. This is based on findings from this study of novice gymnasts in their early stage of learning the longswing and our more recent studies of advanced and elite gymnasts performing the longswing (Vicinanza et al., Citation2018), in addition to, the early longswing papers from our laboratory (Irwin & Kerwin, Citation2005, Citation2007; Williams et al., Citation2012, Citation2015a). The model is essentially a two-process model that: (1) exploits the advantages of gravity in the free fall of the first half (0–180°) of the circle and (2) in the second half (180–360°) provides energy input into the system via joint action to enhance the radial angular velocity so as to complete the return to the bar and the 360° circle motion. There could be tuning (usually additional energy input) in segment 4 on any given trial but we include this as part of the energy input phase.
0–180°: process 1 – exploit gravity
Initiate free fall from bar to generate as much radial angular velocity by 180° as can be controlled in preparation for energy input in the functional phase to complete the cycle. Maximum angular velocity is typically at ~ 180° and the high velocity in the 90–180° degree segment leads to asymmetry in the phase plane with the mirror contrast to velocity in the 180–270° segment.
180–360°: process 2 – inject energy to sufficiently enhance radial angular velocity of the system and fine tune as needed to complete the longswing cycle
Early in practice before the longswing circle has been completed the learner injects mechanical energy close to and even before the 180° minimum height position to complete the circle. The advanced gymnast initiates energy input later in the 180–270° segment and completes the circle from a single impulse whereas the less skilled often needed two-impulse bursts of energy activation to complete the cycle (Arampatzis & Brüggemann, Citation1998, Citation2001; Irwin & Kerwin, Citation2006). The impulse primarily comes from hip and/or shoulder activation. The neck, ankle, and knee motions are small but in phase to a large degree with hip and shoulders though they provide little absolute level of energy input. Early in practice the energy input is dominated by hip action that also reduces the moment of inertia and the resistance to acceleration. Elite gymnasts tend primarily to use the shoulders for energy input to enhance momentum towards the bar (Irwin & Kerwin, Citation2007).
The transition phases between these processes tend to generate reduced and more variable radial angular velocity as revealed in Poincare plots (Vicinanza et al., Citation2018). There is also degeneracy in the joint coordination solution (shoulders, hips, knees) used to generate the energy input (both within- and between-participants). The behavioural dynamics shown as a function of skill level are consistent with a single forced oscillator model of the longswing (Bauer, Citation1983). The phase plane of the CM is in effect the macroscopic variable that channels the organisation of the system though the relative phase of vertical bar motion with that of CM completes the macroscopic description of the longswing motion.
The phase plane for a CM cycle shown in is noticeably asymmetrical. This is due to the different kinematics of the gymnast generating angular velocity in the first (gravity) to second (energy input) half of the cycle. It should be noted that considering only position of CM in the cycle leads to substantially greater symmetry, revealing the sensitivity of the relative phase variable that includes velocity.
Implications for coaching
The findings and the associated functional model reveal a number of implications for coaches of the longwing.
The bar and CM motion need to be coordinated suggesting that isolated focused teaching sensitivity to bar-gymnast motion would be useful in whole-part-whole practice scenarios.
Developing the gymnast’s ability to successfully exploit the informational constraints of the task, as dictated by the international governing body, emphasises that the bar and gymnasts should be considered as a complete system.
The essential constraint on completing the longswing circle is that angular velocity does not drop below a certain cycle sustaining level for too long a time period. Educate novices, through practice drills, about the gravity challenge on radial angular velocity of the two half segments of the circle.
The more effective the initial gravity exploiting phase in generating radial angular velocity the less work to be done in the functional phase. So, the free fall phase is important preparation for the needed energy input of the functional phase.
There are effectiveness and efficiency benefits to be realised by appropriate timing and energy input (rate, amount). Practice different parameter combinations of these variables and relate these to the specific joint contributions.
Understanding the task dynamics, candidate collective variable/s, and how these change as a function of skill development promotes the idea of effective and efficient task decomposition. This can facilitate a coach’s understanding of skill and form the conceptual understanding of the task as highlighted in the model of Irwin et al. (Citation2005).
Disclosure statement
No potential conflict of interest was reported by the author(s).
Correction Statement
This article has been republished with minor changes. These changes do not impact the academic content of the article.
References
- Arampatzis, A., & Brüggemann, G. P. (1998). A mathematical high bar- human body model for analysing and interpreting mechanical- energetic processes on the high bar. Journal of Biomechanics, 31(12), 1083–1092. https://doi.org/10.1016/S0021-9290(98)00134-1
- Arampatzis, A., & Brüggemann, G. P. (2001). Mechanical energetic processes during the giant swing before the Tkatchev exercise. Journal of Biomechanics, 34(4), 505–512. https://doi.org/10.1016/S0021-9290(00)00212-8
- Balasubramanian, R., & Turvey, M. T. (2004). Coordination modes in the multisegmental dynamics of hula hooping. Cybernetics, 90(3) 176–190. https://doi.org/10.1007/s00422-003-0460-4
- Bauer, W. L. (1983). Swinging as a way of increasing the mechanical energy in gymnastic manoeuvres. In H. Matsui & K. Kobayashi (Eds.), Biomechanics vol VIII-B (pp. 801–807). Human Kinetics.
- Busquets, A., Marina, M., & Angulo-Barroso, R. M. (2013a). Changes in motor strategies across age performing a longswing on the high bar. Research Quarterly for Exercise and Sport, 84(3), 353–362. https://doi.org/10.1080/02701367.2013.810537
- Busquets, A., Marina, M., & Angulo-Barroso, R. M. (2013b). Coordination analysis reveals differences in motor strategies for the high bar longswing among novice adults. PLos ONE, 8(6), e67491. https://doi.org/10.1371/journal.pone.0067491
- Cohen, J. (1973). Eta-squared and partial eta-squared in fixed factor anova designs. Educational and Psychological Measurement, 33(1), 107–112. https://doi.org/10.1177/001316447303300111
- Curry, S. M. (1976). How children swing. American Journal of Physics, 44(10), 924–926. https://doi.org/10.1119/1.10230
- Edelman, G. M., & Gally, J. A. (2001). Degeneracy and complexity in biological systems. Proceedings of the National Academy of Sciences of the United States of America, 98(24), 13763–13768. https://doi.org/10.1073/pnas.231499798
- Goldfield, E. C., Kay, B. A., & Warren, W. H. (2003). Infant bouncing: The assembly and tuning of action systems. Child Development, 64(4), 1128–1142. https://doi.org/10.2307/1131330
- Irwin, G., & Kerwin, D. G. (2006). Musculoskeletal work in the longswing on high bar. In E. F. Moritz & S. Haake Eds., The engineering of sport 6, volume 1: Developments for sports (pp. 195–200). Springer LLC. ISBN: 0–387–31773–2.
- Irwin, G., Exell, T. A., Manning, M. L., & Kerwin, D. G. (2014). Biomechanical evolution of the Tkachev on uneven bars in female gymnastics. International Biomechanics, 1(1), 21–28. https://doi.org/10.1080/23310472.2014.983165
- Irwin, G., Hanton, S., & Kerwin, D. G. (2005). The conceptual process of progression development in artistic gymnastics. Journal of Sports Sciences, 23(10), 1089–1099. https://doi.org/10.1080/02640410500130763
- Irwin, G., & Kerwin, D. G. (2005). Biomechanical similarities of progressions for the longswing on high bar. Sports Biomechanics, 4(2), 164–178. https://doi.org/10.1080/14763140508522861
- Irwin, G., & Kerwin, D. G. (2007). Musculoskeletal demands of progressions for the longswing on high bar. Sports Biomechanics, 6(3), 361–374. https://doi.org/10.1080/14763140701491336
- Irwin, G., Williams, G., & Newell, K. (2019). The dynamics of coordination, control and skill in sport. Proceedings of the 37th International Conference on Biomechanics in Sports, Miami, USA. Retreived from https://commons.nmu.edu/isbs/
- Irwin, G., Williams, G. K. R., Kerwin, D. G., von Lieres und WilkauH., &, Newell, K. M., (2021). Learning the high bar longswing:I. task dynamics and emergence of the coordination pattern. ournal of Sports Sciences., https://doi.org/10.1080/02640414.2021.1953828
- Kelso, J. A. S. (1995). Dynamic patterns: The self-organization of brain and behavior. MIT Press.
- Kerwin, D. G., & Irwin, G. (2010). Musculoskeletal work preceding the outward and inward Tkachev on uneven bars in artistic gymnastics. Sports Biomechanics, 9(1), 16–28. https://doi.org/10.1080/14763141003690203
- Newell, K. M., & Liu, Y-T. (2020). On collective variables and task constraints in movement coordination, control and skill. Journal of Motor Behavior, Oct 26, 1–27.
- Okamoto, A., Sakurai, S., Ikegami, Y., & Yabe, K. (1987). Mechanical work in the giant swing on the horizontal bar. In G. de Groot, A. P. Hollander, P. A. Huijing, & G. J. van Ingen Schenau (Eds.), Biomechanics XI-B (pp. 758–762). Free University Press.
- Okamoto, A., Sakurai, S., Ikegami, Y., & Yabe, K. (1989). The changes in mechanical energy during the giantswing backward on the horizontal bar. In L. Tsarouchas, J. Terauds, B. A. Gowitzke, & L. E. Holt (Eds.), Biomechanics in sports V (pp. 338–345). Hellenic Sports Research Institute.
- Putnam, C. (1991). A segment interaction analysis of proximal to distal sequential segment motion patterns. Medicine and Science in Sport and Exercise, 23(1), 130–144. https://doi.org/10.1249/00005768-199101000-00019
- Readhead, L. (1997). Men’s gymnastics coaching manual. Crowood Press.
- Strogatz, S. H. (2018). Nonlinear dynamics and chaos (2nd ed.). CRC Press.
- Strutzenberger, G., Edmunds, R., Nokes, L. D., Mitchell, I. D., Mellalieu, S. D., & Irwin, G. (2020). Player–surface interactions: Perception in elite soccer and rugby players on artificial and natural turf. Sports Biomechanics, 1–11. https://doi.org/10.1080/14763141.2020.1720279
- Vicinanza, D., Williams, G., Smith, L., Irwin, G., & Newell, K. M. (2018). Limit cycle dynamics of the gymnastics longswing. Human Movement Science, 57, 217–226. https://doi.org/10.1016/j.humov.2017.12.014
- Williams, G., Irwin, G., Kerwin, D. G., & Newell, K. M. (2012). Kinematic changes during learning the longswing on high bar. Sports Biomechanics, 11(1), 20–33. https://doi.org/10.1080/14763141.2011.637120
- Williams, G., Irwin, G., Kerwin, D. G., & Newell, K. M. (2015a). Changes in joint kinetics during learning the longswing on high bar. Journal of Sports Sciences, 33(1), 29–38. https://doi.org/10.1080/02640414.2014.921831
- Williams, G., Irwin, G., Kerwin, D. G., & Newell, K. M. (2015b). Biomechanical energetic processes during learning the longswing on high bar. Journal of Sports Sciences, 33(13), 1376–1387. https://doi.org/10.1080/02640414.2014.990484
- Yeadon, M. R., & Hiley, M. J. (2000). The mechanics of the backward giant circle on the high bar. Human Movement Science, 19(2), 153–173. https://doi.org/10.1016/S0167-9457(00)00008-7