
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
Abstract–
In this article, some interesting applications of generalized inverses in the graph theory are revisited. Interesting properties of generalized inverses are employed to make the proof of several known results simpler, and several techniques such as bordering method and inverse complemented matrix methods are used to obtain simple expressions for the Moore-Penrose inverse of incidence matrix and Laplacian matrix. Some interesting and simpler expressions are obtained in some special cases such as tree graph, complete graph and complete bipartite graph.
1 Introduction
Due to wide applications in various fields of science, the subjects of generalized inverses and graph theory intersect and are extensively studied in the literature (see, [Citation3, Citation4, Citation6, Citation16]). The matrices such as incidence matrix, adjacency matrix and Laplacian matrix play prominent role in studying the network flow, electrical networks, defining new distances on graphs and studying Markov process. For example, if Q is the incidence matrix of given network (multi-digraph) then the system Qx = b represents net inflow at each of the vertices when the flows through the edges of network is given by x. As the matrix Q is not invertible and the solution for Qx = b need not be unique or consistent, it is of natural interest that to find minimum inflow through n arcs of the network to achieve net inflow at m vertices are as close as possible to the desired net inflow. It is also found in the literature that Lapacian matrix and its Moore-Penrose inverse have an interesting relation with distance matrix. The purpose of this article is to revisit the literature and employ several interesting properties and new methods of computing Moore-Penrose inverse to provide new proofs and new observations related to the existing results.
2 Preliminaries
In this section, we introduce the notations and basic definitions related to generalized inverses and graph theory.
Throughout this paper refers to a multi-digraph, unless indicated otherwise. The notation
(or simply Q) refers to incidence matrix of
. The matrices B, A, and D refers to incidence matrix, adjacency matrix and the distance matrix in the case of
is a simple unweighted graph. The Laplacian matrix of the graph
is denoted by
(or simply L). The notations
denote the column vector with entries 1, Jn and Jmn denote the matrices of size
and m × n, respectively, with all entries equal to 1. For all the standard terminologies and notations related to graphs, we refer the readers to [Citation8] and [Citation3].
The notation is used to denote the class of all real m × n matrices. For
, we denote transpose of A, conjugate transpose of A, column space of A, row space of A, null space of A, trace of A and rank of A by AT,
and
, respectively. For matrices X and Y, we write
if
and
. If S is a subspace of a vector space, then
denotes the orthogonal complement of S.
For , consider the following matrix equations called Penrose conditions:
The matrix G satisfying the condition (1) of the Penrose conditions is called the generalized inverse. Moore-Penrose inverse is the matrix G satisfying all the four equations of the Penrose conditions. An arbitrary generalized inverse of A is denoted by A– and the Moore-Penrose inverse is denoted by . Whenever A is a square matrix, the unique matrix G, whenever exists, satisfying (1) and (2) of Penrose conditions and AX = XA is called the group inverse of A and denoted by
. For all the basics related to generalized inverses, we refer the readers to [Citation16] and [Citation3].
In the following lemmas, we list some interesting properties required for the further discussions.
Lemma 2.1.
For an m × n matrix A, we have the following:
If B and C are any nonzero matrices of suitable size, then
is invariant under any choice of A– if and only if
If m = n and
Lemma 2.2.
Given a graph with n vertices and m edges, we have the following:
The null space of Q is
The rank of Q is n – 1.
The Laplacian matrix L (
Readers are referred to [Citation3] for the proof of above lemma.
3 Generalized inverses of incidence matrix
The graph representing a network flow is always a connected multi-digraph and it has been noted that the incidence matrix is a rectangular matrix with its rank is strictly lesser than its order. If the network has n nodes and m arcs, then the rank is always n – 1. So, finding the minimum inflow through each of arcs to achieve the net inflow closer to the desired inflow at each of the nodes. From the theory of generalized inverses it is known that is the unique minimum norm least squares solution of the linear system Ax = b.
Y. Ijiri in his article [Citation9], investigated that the Moore-Penrose inverse of incidence matrix representing the given network flow has several interesting properties and it provides the optimal solution to the network flow problem mentioned above. In this section we review his work and provide several innovative methods of computing the Moore-Penrose inverse of the incidence matrix using its properties. The following theorem is due to Y. Ijiri, describing Moore-Penrose inverse of incidence matrix with reference to given network.
Theorem 3.1.
If Q is the n × m incidence matrix of a given network, then an m × n matrix X is the Moore-Penrose inverse of Q if and only if , the ith entry of jth row of X it satisfies the following conditions:
For any sequence of arcs connecting a given pair of nodes the sign adjusted sum of the flow quantities are identical.
Now, we will have an independent discussion for the proof of the above Theorem 3.1 using the properties of Moore-Penrose inverse.
If satisfying the Penrose conditions (1)–(4) given in the definition. In fact,
is the unique generalized inverse such that
. Referring Lemma 2.2 we have that
and therefore X satisfies condition 1 given in the theorem. Since each column of Q could be written as a linear combinations of given basis columns (corresponding to a spanning tree) uniquely,
implies that X satisfies condition 2.
If X is any matrix satisfying the conditions given in the theorem, then we get that and therefore X satisfies conditions (1) and (3) of Penrose-conditions. From condition 2 of the theorem, we get that the nullspaces of Q and XT are same and therefore XQ is symmetric and
. So,
.
Following the properties of Moore-Penrose inverse of an incidence matrix observed in the Theorem 3.1, Ijiri [Citation9] proposed a method of computing Moore-Penrose inverse of incidence matrix Q of a network with n nodes and m arcs (see also [Citation3]). The steps involved in the computation are as given in the following:
Identify a spanning tree of the given network.
Write Q in the form of
Solve for D, where V = UD (Uniquely exists, as U is a full column rank matrix).
For suitable i, let
Find
the submatrix
jth column of X is
Note that this method involves several computations including finding the unknown matrix D. In the following, we provide a relatively simple and convenient computational method to find the Moore-Penrose inverse of Q, using the properties of incidence matrix and the recent results available on Moore-Penrose inverses.
3.1 By using projector
It may be noted from the literature (for example see, [Citation16]) that a least-square generalized inverse of A satisfying the conditions (1) and (3) of Penrose conditions is given by for any arbitrary generalized inverse of A. Also, for any oblique projectors P1 and P2 onto
and
, respectively, the matrix
is uniquely determined and G is the generalized inverse inverse of A whose column space is
and the row space is
. Therefore, the Moore-Penrose inverse of Q is given by
(1)
(1)
which is space equivalent with QT. One may even verify EquationEq. (1)(1)
(1) by direct substitution.
3.2 By partioning Q
Now from the properties of incidence matrix of a network, we can partition the n × m incidence matrix Q as
(2)
(2) where Q1 is the submatrix of Q taking first n – 1 rows of Q and
. Note that by using the properties of incidence matrix, Q1 is full row rank matrix. Now using EquationEqs. 1
(1)
(1) and Equation2
(2)
(2) , an expression for the Moore-Penrose inverse is given by
(3)
(3)
In case of is a tree, the expression for the Moore-Penrose inverse of Q given in EquationEq. (3)
(3)
(3) reduces to the following, as the matrix with first n – 1 rows of Q is invertible.
(4)
(4)
Now we will consider some examples to demonstrate the above expressions.
Example 3.2.
Consider the network given below and the corresponding incidence matrix given by
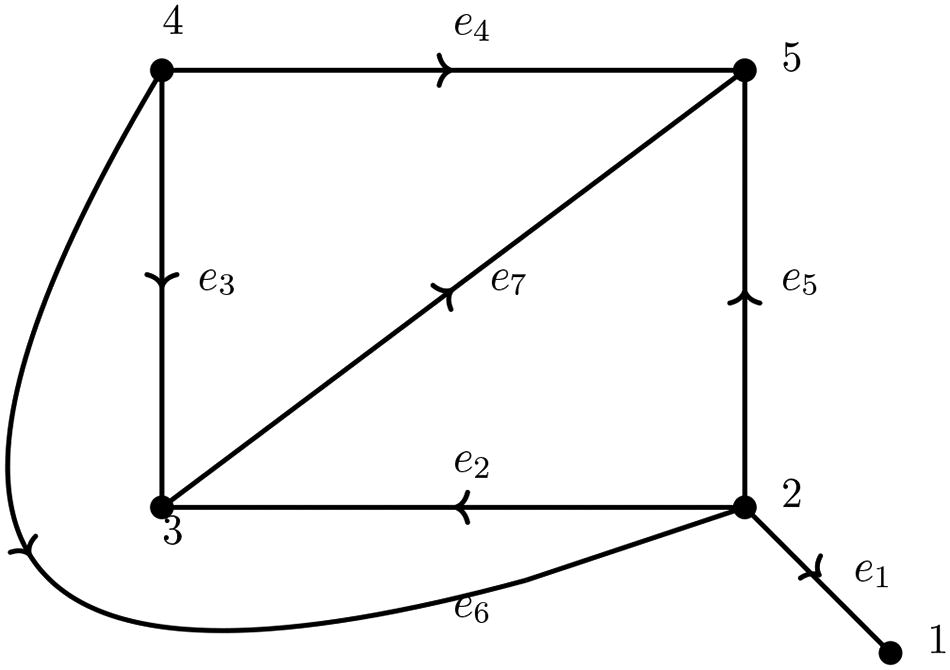
Network
Now, partition the matrix Q as , where
and
. By substitution, we get
and using EquationEq. (3)
(3)
(3) , we get the Moore-Penrose inverse of Q as
(5)
(5)
3.3 Interpretation of Moore-Penrose inverse
The jth column of represents the minimum flow through each of the edges required to achieve the net inflow of
at jth vertex and
at remaining vertices. The flow quantities represented by first column is shown in the network. The minus sign indicates that the flow is in the direction opposite to the direction of the edge. In the following, we interpret the first column of Moore-Penrose inverse given in EquationEq. (5)
(5)
(5) .
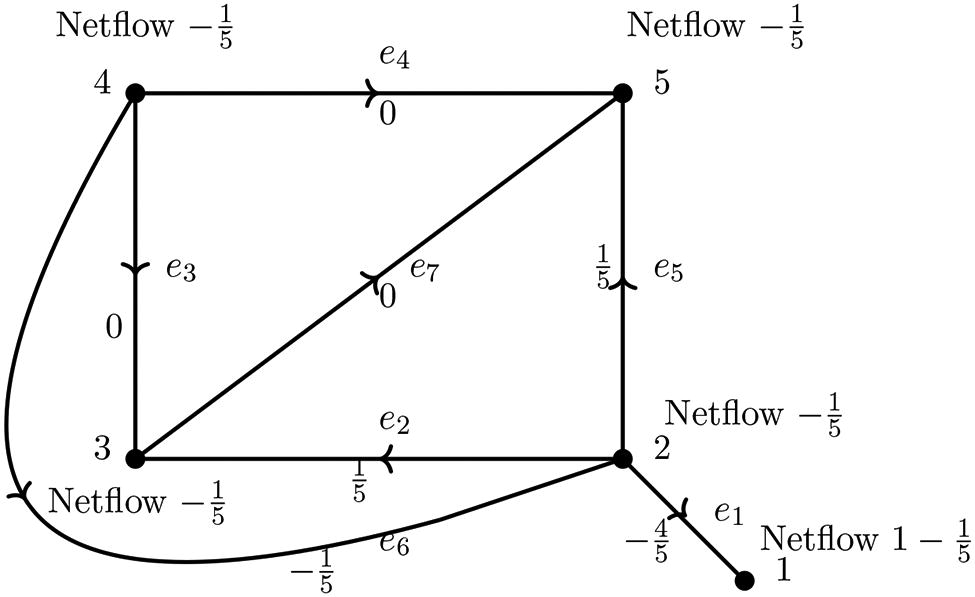
The first column of represents the minimum flow required through each arc of
to achieve the net inflow of
at node 1 and
at remaining nodes, which is nearest to the desired net inflow of 1 at node 1 and 0 elsewhere.
Example 3.3.
Consider the tree given below.
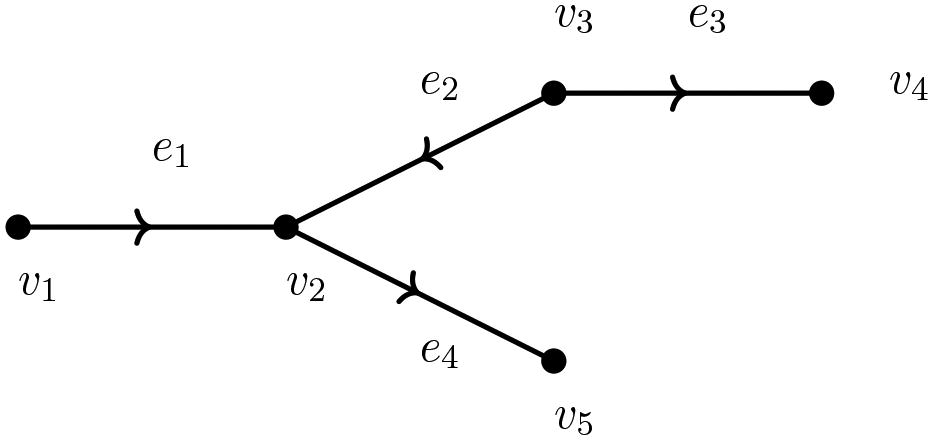
The incidence matrix of is
On partitioning Q as in (2), we get , which is invertible. Now, using (4), the Moore-Penrose inverse of Q is given by
(6)
(6)
3.4 By bordering Q
Given any m × n matrix A of rank r, one may obtain a bordered matrix of size in the form
, where columns of P are the basis for
and the rows of Q are the basis for
, to obtain the Moore-Penrose inverse in the block of
corresponding to A in T. Readers are referred to [Citation13] and [Citation7] for more details.
In the context of being a tree, the corresponding incidence matrix is full column rank matrix with
is
. Therefore,
is invertible and Moore-Penrose inverse of Q is given by
.
Example 3.4.
For the tree given in Example 3.3, we have
and
Thus, the Moore-Penrose inverse of Q is given by .
4 Generalized inverses of weighted graphs
The Laplacian matrix and its generalized inverse have a greater significance in the study of networks. Klein and Randić in [Citation12] introduced a new notion called the resistance distance in a graph, which is different from the conventional distance(called graphical distance) in a graph. The graphical distance between the vertices a and b in the graphs and
given below are all equal to 2. However, in the graph
or
, the number of paths between a and b is more than one. In other words, a and b have better communication in these graphs. One might think of a real life example of traveling between the cities a and b. Fewer the number of routes connecting a and b, the more is the traffic, making it more difficult to travel from one city to another.
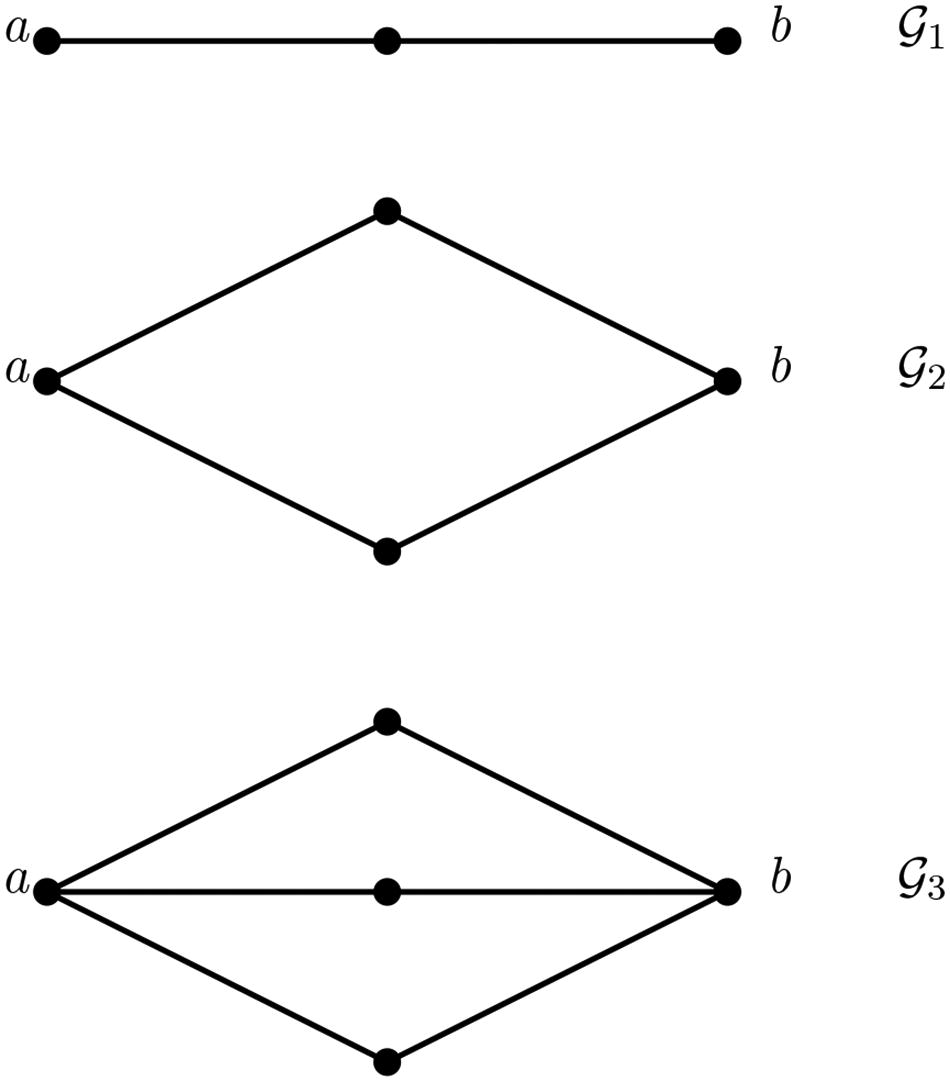
The ease of communication between a and b increases as we go from graph to
to
. However, the usual distance between a and b is the same for all the three graphs.
The resistance distance introduced in [Citation12] is based on the electric network theory and it has the characteristic property of multiple-route distance diminishment. They considered each edge of a graph as a fixed resistor and defined the resistance distance between two vertices as the effective resistance between those two vertices.
Throughout this section, the graph is simple, connected and edges (i, j) are associated with a strictly positive number (say wij). Adjacency matrix
(or simply A) is with entries equal to the reciprocal of the weight if the corresponding vertices are adjacent and equal to zero, otherwise. The degree of each vertex is the sum of reciprocal of the weights of the edges incident with it. The degree matrix Δ is a diagonal matrix in which the (i, i)th entry is the degree of ith vertex. The distance matrix D is defined such that the (i, j)th entry is the minimum of length of paths between vi and vj, where the length of path is the sum of weights of edges. The Laplacian matrix of the graph
is
. It may be noted easily that
and is of rank n – 1.
Using Kirchhoff’s law and Ohm’s law, it is proved in [Citation12] that the resistance distance (effective resistance) between the ith vertex and jth vertex is given by
(7)
(7) where
and
is the (i, j)th entry of
. In fact, with
being the diagonal matrix whose diagonal entries are the diagonal entries of
, the matrix
(8)
(8)
is called the resistance matrix.
Since it has been noted that L is a positive semidefinite matrix (see, [Citation11]), the above “resistance distance” is a distance function on .
We list some interesting properties of generalized inverses of Laplacian matrix of a weighted graph .
Theorem 4.1.
Given a graph , the following hold.
(ii)If
This in turn gives that is a generalized inverse of L and D = R.
(ii) If
Proof.
The EquationEq. (9)(9)
(9) of part 1 of the above theorem could be verified easily by substitution, noting that distance between the adjacent vertices in a tree is same as the weight of edge incident with them.
is a generalized inverse of L could be proved using EquationEq. (9)
(9)
(9) and the fact that
.
Since and
, we get
is invariant under the choice of L– and therefore
, proving that R = D.
For the proof of part (ii), we refer to Lemma 1 of [Citation2]. □
Now, we will discuss different methods of constructing Moore-Penrose inverse of L.
4.1 Inverse complemented matrix method
In [Citation10], in the more general context of ring elements, it has been proved that every reflexive generalized inverse of a square matrix could be obtained by using suitable inverse complement. The matrix version of the same result in the case of Moore-Penrose inverse is given below.
Theorem 4.2.
For any square matrix A of size n × n and any matrix C such that A + C is invertible and , the Moore-Penrose inverse of A is given by
(10)
(10)
Further, for any orthogonal projection P onto and orthogonal projection Q onto
, we get
.
Since and L is symmetric, the following theorem follows as corollary to the Theorem 4.2.
Theorem 4.3.
If L is the Laplacian matrix of a weighted graph , we have
(11)
(11) for any nonzero λ.
By taking in the expression EquationEq. (11)
(11)
(11) , we get
In the following example, we find the Moore-Penrose inverse of Laplacian matrix of a network using Theorem 4.3 and so obtained Moore-Penrose inverse is used to find the resistance matrix of the network.
Example 4.4.
Consider the electrical network given below, for which the Laplacian matrix is given by
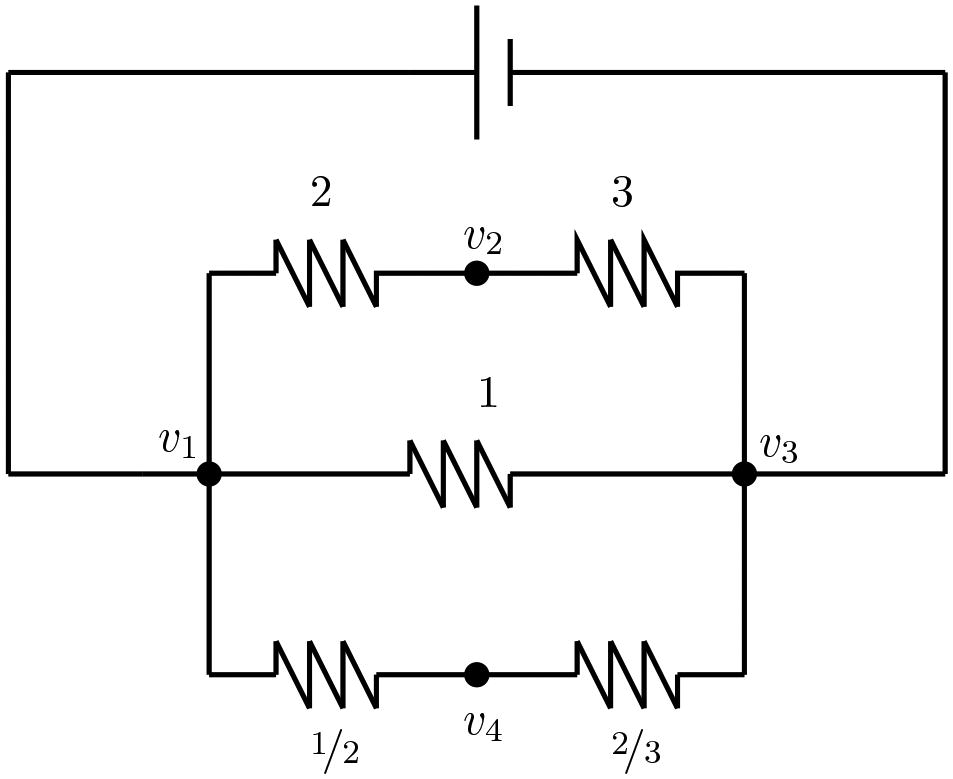
Network
Now, and hence by taking λ = 1 in EquationEq. (11)
(11)
(11) , the Moore-Penrose inverse of L is given by
Therefore, the resistance matrix is
The (i, j)th entry of R represents the resistance distance between the vertices vi and vj. That is, the resistance distance between the vertices v1 and v2 is and the resistance distance between the vertices v2 and v4 is
and so on.
4.2 Bordering method
For any m × n matrix of rank r, it has been proved in [Citation13] that the bordered matrix , where P is
matrix with
and Q is
matrix with
, is invertible and the inverse is useful in obtaining the Moore-Penrose inverse of A. In fact, he showed that the block G11 in the matrix
, correspond to A in T, is the Moore-Penrose inverse of A, G12 is a least squares g-inverse (moreover, a right inverse) of Q, and G21 is a minimum norm g-inverse (moreover, a left inverse) of P.
Since and
, it follows that the matrix
is invertible and the Moore-Penrose inverse is given by
(12)
(12)
Example 4.5.
Consider the Laplacian matrix L of the network given in Example 4.4, for which
and
Thus, the Moore-Penrose inverse of L is given by
4.3 Partition method
Let the Laplacian matrix of a graph be partitioned as
(13)
(13) where L11 is the
principal submatrix of L. Since
and
, the submatrix L11 is a full rank matrix. Noting that
is a projection onto
and that
is a generalized inverse of L, and therefore the Moore-Penrose inverse of L is given by
(14)
(14)
Example 4.6.
Partitioning the Laplacian matrix L of network considered in Example 4.4 as in EquationEq. (13)(13)
(13) , we get
and
. Now, using EquationEq. (14)
(14)
(14) , the Moore-Penrose inverse of L is given by
As a consequence of EquationEq. (14)(14)
(14) , the resistance distance between a fixed vertex (say vn) and the rest are given as in the following theorem.
Theorem 4.7.
If we partition the Laplacian matrix L in the following form
where L11 is the first principal submatrix of order n – 1 of L. Then the resistance distance between the vertices
and vn is given by the corresponding diagonal entries of
. In other words,
where λ is the reciprocal of number of spanning trees in the graph.
Proof.
Since fij is in is invariant under the choices of L– . Now the theorem follows immediately from the definition of resistance distance and the fact
is a generalized inverse of L. □
4.4 Moore-Penrose inverse of some special graphs
Given a complete graph and a complete bipartite graph
(both are unweighted), the corresponding Laplacian matrices are of the form
and
, respectively. Further, it may be noted by direct verification that
(15)
(15)
Above information is useful in proving the following theorem.
Theorem 4.8.
For complete graph and complete bipartite graph
, both are unweighted, we have
Proof.
(i) The Laplacian matrix of has all of its diagonal entries equal to p – 1 and off diagonal entries equal to –1 i.e.,
and hence
. Now, by taking λ = 1 in EquationEq 11
(11)
(11) , we get
(ii) Note that the Laplacian of is
and hence,
(18)
(18)
Now, by taking λ = 1 in EquationEq. (11)(11)
(11) and using EquationEq. (15)
(15)
(15) , we obtain the Moore-Penrose inverse as in Eq. (17). □
Theorem 4.9.
Let Kp and denote the complete graph and complete bipartite graphs, both are unweighted, respectively.
(i) The resistance distance between any two distinct vertices of is
and the resistance matrix is
(ii) Suppose vi and vj are two distinct vertices of with bipartition (V 1, V 2). Then the resistance distance between vi and vj is given by
and resistance matrix is given by
Proof.
The proof is immediate from the Eqs. (16), (17) and the definition of resistance distance. □
5 Conclusion
In this article, we have reviewed interesting applications of generalized inverses in the area of graph theory. Some of the existing results are rewritten focusing on the role of generalized inverses. Significance of Moore-Penrose inverse of incidence matrix of a directed graph in network flow analysis is studied. New methods of computing the Moore-Penrose inverse of incidence matrix and that of Laplacian matrix are provided.
References
- Bapat, R. B. (1997). Moore-penrose inverse of the incidence matrix of a tree. Linear Multilinear Algebra. 42: 159–167.
- Bapat, R. B. (2004). Resistance matrix of a weighted graph. MATCH Commun. Math. Comput. Chem. 50: 73–82.
- Bapat, R. B. (2014). Graphs and Matrices, 2nd ed. London: Springer-Verlag.
- Ben-Israel, A., Greville, T. N. E. (1974). Generalized Inverses: Theory and Applications, 2nd ed. New York: Springer.
- Bhat, K. N., Karantha, M. P., Eagambaram, N. (2021). Inverse complements of a matrix and its applications. J. Algebra Appl. 20(8): 1–12.
- Bollobás, B. (1998). Modern Graph Theory, 1st ed. New York: Springer-Verlag.
- Eagambaram, N. (1991). (i,j,…,k)-inverses via bordered matrices. Sankhya¯ Ser. A (1961–2002) 53(3): 298–308.
- Harary, F. (1969). Graph Theory, 1st ed. Boston, MA: Addison-Wesley.
- Ijiri, Y. (1965). On the generalized inverse of an incidence matrix. J. Soc. Indust. Appl. Math. 13(3): 827–836.
- Kelathaya, U., Varkady, S., Karantha, M. P. (2022). Inverse complements and strongly unit regular elements. J. Algebra Appl. 21(10): 1–11.
- Kirkland, S. J., Neumann, M., Shader, B. L. (1997). Distances in weighted trees and group inverse of Laplacian matrices. SIAM J. Matrix Anal. Appl. 18(4): 827–841.
- Klein, D. J., and Randić, M. (1993). Resistance distance. J. Math. Chem. 12: 81–95.
- Nomakuchi, K. (1980). On the characterization of generalized inverses by bordered matrices. Linear Algebra Appl. 33: 1–8.
- Prasad, K. M. (2012). An introduction to generalized inverse. In: Bapat, R. B., Kirkland, S., Prasad, K. M., Puntanen, S., eds. Lectures on Matrix and Graph Methods. Manipal, India: Manipal University Press, pp. 43–60.
- Prasad, K. M., Bhaskara Rao, K. P. S. (1996). On bordering of regular matrices. Linear Algebra Appl. 234: 245–259.
- Rao, C. R., Mitra, S. K. (1971). Generalized Inverses of Matrices and its Applications. New York: Wiley.