
1. Introduction
MARIO is the main outgrowth of the Mascoti-bio project, which has begun in 2014 thanks to ANSM support.
The aim of this project is to propose a new analog simulator of oral cavity, alternative to animal experimentation, for the testing and engineering of dental biomaterials. Indeed, if there are devices to simulate wear and ageing of dental materials, none of them is able to recover the released products to study their possible toxicity (Abouelleil et al. Citation2015).
MARIO is therefore the first robot of its kind to characterize existing materials, predict their ageing and assess new products (Ferracane Citation2013). To achieve this objective, it has many parameters existing in the oral cavity that can be all varied to simulate the different conditions encountered in vivo.
2. Description
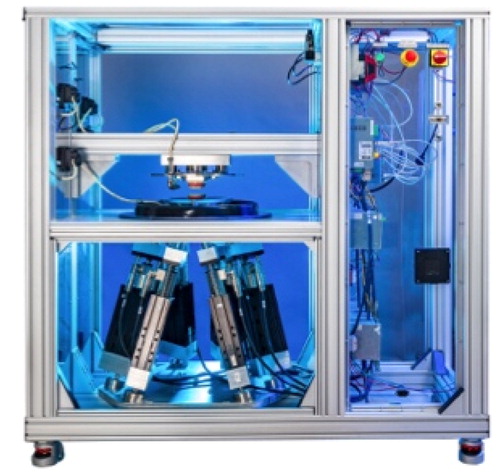
To be able to reproduce the physiological conditions of the oral cavity, MARIO should respect the chemical (pH, artificial saliva), thermal (thermal shock, oral temperature) and mechanical parameters (mandibular kinematics, applied forces) (Heintze Citation2006). It should also be able to incorporate natural teeth, and restored teeth with the material to be tested. Moreover, a specific software interface allows to adjust all these parameters and to generate masticatory cycle programs to simulate aging and finally to recover the degradation compounds ().
Figure 1. Overview of the robot.
2.1. Chemical and thermal parameters
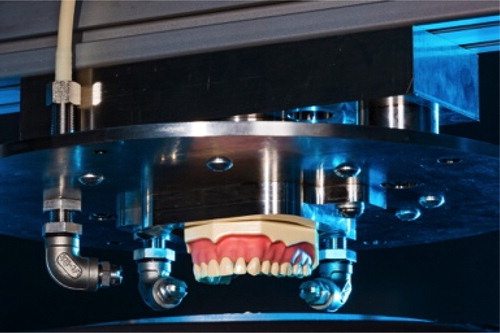
3 pumps are incorporated into the device, one for artificial saliva at oral temperature (33 °C) and the other 2 for injecting cold or hot (from 0,5 to 55 °C) acidified saliva. The heating and cooling of these liquids is ensured by thermostatic baths and a cryostat connected to the pumps. Nozzles that diffuse these liquids are adjustable according to the target tooth ().
Figure 2. Overview of the 3 movable nozzles (without the protective skirt that prevents water projection).
This set allows to simulate hot and cold foods while respecting the thermal buffer of the oral cavity. Indeed, the flow rates and start-up of the pumps are programmable from the software interface, even if the saliva at 33 °C is in continuous flow.
2.2. Mechanical parameters
To reproduce all the mandibular movements, we had to use the mechanical system suggested by Alemzadeh in 2008 (Alemzadeh and Raabe Citation2008) which is the realization of a hexapod. To achieve this, we created 2 superimposed platforms with 6 balls and 6 linear electric motors, delivering an axial force of 500 N. Each of the motors is controlled by the software interface and the set allows movement in space with 6 degrees of freedom, while gauging the force applied at all times.
According to literature, a polyvinylsiloxane material fixed to the antagonist arch is used to simulate the food to be chewed.
2.3. Specific software
The software interface has several functions. It allows moving the mandible in relation to the maxilla, then by acquiring and recording the successive positions, to create kinematic movements. It also allows to control the pumps (injection and recovery) and to adjust the time of chewing cycles (including interruptions and mandible velocity). This set up makes it possible to create chewing programs that can be repeated during experiments.
3. Results and discussion
3.1. Current state of robot operation
The seal and operating tests of the mechanical parts (pumps, motors) and software have been satisfactory and MARIO is currently operational. This has made it possible to carry out calibration tests in order to identify the released products pertaining to the robot parts. Preliminary tests on easy-to-degrade biomaterials such as temporary restoration material (IRM™, Dentsply) have been completed and samples are awaiting analysis.
The chemical means of analysis are an important step to be finalised. Characterization of released compounds in a diluted solution requires specific techniques (chromatography, mass spectrometry, for example) that have to be adapted to this new device.
3.2. Developments
Since the robot has to test photosensitive materials, the skirt (translucent for the tests), which isolates the wet robot environment, will be black. Also, the saliva bottles containing the products released by the materials are tinted to prevent secondary photopolymerization.
Finally, the initial jaws (calibrated for geometric references) will be replaced. The later will include replica of the periodontal ligament, which exists in natural teeth, and root sensors to record tooth movements during chewing. This data will then be used to operate a bioreactor to work on bone or periodontal ligament close to dental roots and/or implants (Conserva et al. Citation2008).
However, this robot lacks the bacterial flora present in the oral cavity that are responsible for enzymatic degradation of biomaterials (Colon and Muller-Bolla Citation2007).
As the robot is equipped to perform not only wear tests, the use of the reference material used to simulate the food may be discussed. Indeed, the food bolus is reduced during the chewing cycles, in accordance with the reduction of the amplitude of the real mandibular kinematic that we manage to reproduce. Therefore, we are working on a material, with a clearly identified composition, which will be broken up under the combined effect of saliva and chewing movements, without clogging the pumps or be responsible of chemical interactions.
4. Conclusions
The developed robot is capable of reproducing the main characteristics of natural human chewing. It will be able to recover the chemical compounds released by dental materials during their ageing, for subsequent analysis. MARIO will therefore be able to establish a list of chemical compounds released from existing dental materials and could be used for the development of new products (Bouillaguet Citation2004).
Acknowledgements
We would like to thank ANSM for funding this project, the Frasaco GmbH company, for its confidence and all the people who worked on this project, in particular J. Wavresky, our mechatronic engineer.
References
- Abouelleil H, Attik N, Jeannin C, Colon P, Grosgogeat B. 2015. Potential toxicity of bisphenol A and other related substances in dental restorative resins. J Oral Sci Health. 2(1):1–15.
- Alemzadeh K, Raabe D. 2008. Prototyping artificial jaws for the robotic dental testing simulator. Proc Inst Mech Eng H. 8:1209–1220.
- Bouillaguet S. 2004. Biological risks of resin-based materials to the dentin-pulp complex. Crit Rev Oral Biol Med. 15(1):47–60.
- Colon P, Muller-Bolla M. 2007. Les échecs des restaurations postérieures. Odontologie Restauratrice. 28:583–590.
- Conserva E, Menini M, Tealdo T, Bevilacqua M, Pera F, Ravera G, et al. 2008. Robotic chewing simulator for dental materials testing on a sensor-equipped implant setup. Int J Pros. 21:501–508.
- Ferracane JL. 2013. Resine-based composite performance: are there some things we can’t predict? Dent Mater. 29(1):51–58.
- Heintze SD. 2006. How to qualify and validate wear simulation devices and methods. Dent Mater. 22(8):712–734.