
1. Introduction
Recently in veterinary medicine, a new technique of intra-articular repair is receiving increasing attention, particularly when using prosthetic ligaments (Barnhart et al. Citation2019). The development of such technique is encouraged by a need for easy and simple surgical procedures, and the availability of new resistant ligaments made of high-density polyethylene. However, all intra-articular techniques suffer from weakness of the anchoring of the ligament both in the immediate and in the first months postoperative. Various fixing solutions have been developed both in animals and in humans. The interference screws are the gold standard (Jia et al. Citation2017).
This study aimed at testing both static and dynamic biomechanical properties of ruptured CCL repaired with an ultra-high molecular weight polyethylene (UHMWPE) prosthesis. The prosthesis was fixed with 4 interference screws on ex-vivo dog stifle joints. We hypothesized that (i) the values of the maximum strength (Ms) for this LCL stabilisation would be at least similar to those of the natural ligaments; (ii) the initial slipping load (Is) would be superior to normal walking and trotting conditions during immediate postoperative period.
2. Methods
2.1. Sample preparation protocol
Height hindlimbs from 6 adult dogs between 25 and 35 kg were taken. Dogs were of similar size and died from reasons unrelated to the focus of this study. Stifles were dissected to let intact only tibia, CCL and femur. Each extremity of the bone was fixed with resin onto two supports. Sterile compresses moistened with physiological saline held with a polyethylene film were applied around each stifle.
2.2. Implantation of the UHMWPE ligament
After performing the quasi-static tensile tests of rupture on the native CCL, stifles were implanted with a UHMWPE ligament (Novalig, Novetech, Monaco). The rest of CCL was removed. An oblique tibial tunnel was drilled from the cranio-medial insertion of CCL. A femoral tunnel was drilled from the caudo-lateral femoral insertion. The ligament was passed through the 2 tunnels. A first interference screw (diameter: 4.5 mm, 20 mm-long) was inserted from outside to inside the articulation from the distolateral femoral metaphysis. After straightening the ligament, a second interference screw was inserted from outside to inside from the proximo-medial tibia. Each extremities of the ligament were secured. Two transverse tunnels were drilled to screw each tighten extremity of the prosthesis with femoral and tibial interference screws.
2.3. Biomechanical testing
Static and dynamic tensile tests of the CCL were performed on the stifles using a traction system (AGSX Shimadzu, Japan) with a pre-test of 20 mm/min traction until the load reached 10 N, straightening the system. The first static test consisted in a 1 mm/min traction until failure. Failure occurs if the displacement exceeds 40 mm. The stifles stabilized with the polyethylene ligament and the 4 interferences screws were prepared for dynamic testing. A pre-test was achieved consisting of a 20 mm/min traction until the load reached 100 N (i.e., the initial tension). The dynamic rate was fixed at 0.58 Hz during all the 100.000 cycles. The boundary limits were fixed at 100 N of minimum pre-load, and a maximum of 210 N (195 N + 15 N of safety) corresponding to the load undergone by the CCL during trotting (Kim et al. Citation2012). For the two series of tests, the sampling rate for data acquisition was set at 10 Hz. A total of 8 experimental set-ups were considered: 5 under the quasi-static condition (8 D, 11,13 D&G, ) and 3 under the dynamic condition (15-17 D, ).
Figure 1. Histogram of the rupture load and Is of 5 implanted stifles (blue: load for walk 90 N, green: trot 210 N, red: gallop 375 N).
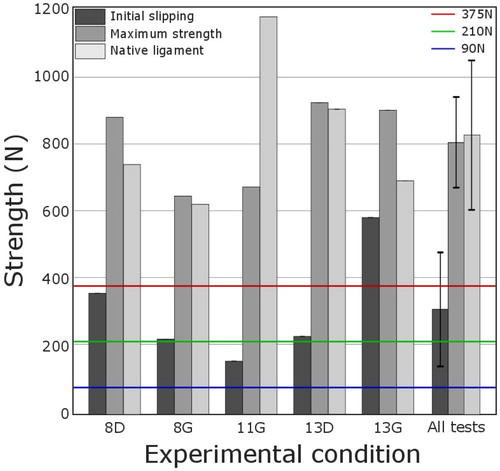
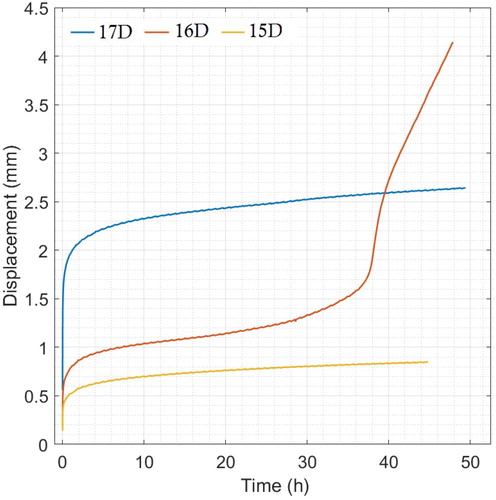
Figure 2. Plots of the mean curves of the dynamic tests for the following set-ups: 15 D, 16 D, and 17 D.
2.4. Data acquisition and processing
During tests, acquisitions of the data were carried out using the TrapeziumX software (Shimadzu, Japan). The data were processed with Matlab. Mean curves were obtained by applying a two-way average moving filter (window size: N = 500).
3. Results and discussion
Quasi-static tests are shown in . No rupture of the set-up occurred. An initial slipping load Is = 309 N ± 151 N (mean ± sd) of the prosthesis was observed at 3.78 mm ± 2.22 mm. Then, the maximum strength Ms = 800 N ± 132 N was reached at 24.4 mm ± 8.73 mm. No significant difference was observed between Ms native and artificial ligaments (ttest, P = 0.87).
All the set-ups including a prosthesis implanted with 4 interference screws gave a higher Is than the load applied to the CCL during walking in dogs (90 N). Besides, 4 out of the 5 tests were also higher than load while trotting (210 N). Lastly, Ms values were 1.54 to 4.27 times higher than Is values. Sliding could be due to an incorrect implantation of interference screws, thus resulting in cancellous bone injury or abnormal compression of the ligament against the cancellous bone. It could also come from the insertion of the ligament prosthesis into the intra-articular subchondral part of both the femoral and tibial bone tunnels. Dynamic investigations are displayed in . During the dynamic tests, the 100.000 cycles lasted for 48 h and simulated typical locomotive motions. Distinct behaviors were outlined. Two of them exhibited similar responses (15,17 D), for which the Is values remained for 5 h until the establishment of a plateau at 0.7 mm and 2.22 mm respectively. Then, the displacement remained insignificant for the last 43 h. The 16 D set-up shows a different behavior, including a resumption of the sliding (approx. 2.5 mm) at 37 h. Xray examination reveals the implantation of the oblique femoro-distal and tibio-proximal screws in the growth cartilage. Cancellous bone properties within the growth zone are known to be poor because it is not yet organized or mineralized. During the very first hours, the displacement observed in 16 D set-up can be explained by an incorrect pre-load of the prosthesis at the interference screws implantation phase which allows an initial slip of the set-up. Obviously, a dynamic test including 100.000 cycles is far beyond what a dog is expected to face in post-operative conditions. This would correspond to a dog trotting for at least 75 km in less than 48 h.
4. Conclusions
In veterinary surgery of the ruptured CCL, this new system of stabilisation has no significant difference with the native ligament for the Ms load slipping. The Is is superior to the load of normal walk and very close to those of trotting. In the light of these biomechanical results, this new system could offer to adult dogs a good and secure stabilization of the stifle with the usual post operative restriction of locomotion during the two months post-operative period needed to boost both fibrous and osseous integration of the ligament.
References
- Barnhart MD, Bufkin BW, Litsky AS. 2019. Biomechanical comparison of four methods of fixation of a polymeric cranial cruciate ligament in the canine femur and tibia. Vet Comp Orthop Traumatol. 32(02):112–116. Barnhart.
- Jia Z, Xue C, Wang W, Liu T, Huang X, Xu W. 2017. Clinical outcomes of anterior cruciate ligament reconstruction using LARS artificial graft with an at least 7-year follow-up. Medicine. 96(14):e6568.
- Kim J Y, Hayashi K, Garcia T C, Kim S-Y, Entwistle R, Kapatkin A S, Stover S M. 2012. Biomechanical evaluation of screw-in femoral implant in cementless total hip system. Vet Surg. 41(1):94–102.