
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.1. Introduction
Biomechanical models of the human body are important tools in understanding the functioning of human movement and its coordination. Creating movable models of the human musculoskeletal system is particularly important for analyzing the dynamic phenomena of the human body. Numerical modeling techniques applied to the human body provide noninvasive analysis of the musculoskeletal structure. There are several ways to create biomechanical models. The most popular method is based on the division of the body into segments and modeling them using rigid and deformable finite elements. However, one of the most important disadvantages of this method is the lack of information about strains and stresses inside the rigid element. Biomechanical models obtained with the finite element method are free from these flaws and they are very powerful tools for analyzing anatomic biomechanical structures as well as developing implants, prostheses and musculoskeletal constructions. The main advantage of such models is their ability to take into account the complex geometries and material behaviors. Currently, there is a tendency to combine both types of models as a synergy of backward kinematics techniques and the Finite Element Method (FEM). For instance, stress and strain fields in bone are possible to obtain only by using FEM, so the first computing environments that use this approach starts to appear. One of them is Artisynth.Footnote1 An alternative approach is the method based on applying muscular forces, function of time, to the finite element model, which are provided by environment like OPENSIM. For this purpose, the plugin “MuscleForceDirection” can be used (Phillips et al. Citation2015). It gives the access to the topography of the attachments of objects representing the muscles and the directions of the fibers activity (muscle contraction force) and assigned them in the FE model. However, this approach cannot be applied in cases where it is necessary to reproduce the motion to take into account the contact between the organs changing over time. The example of such a situation undergoes for instance in the temporo-mandibular jaw cooperating with teeth, disc and fossa of the skull. Our goal is to build a full skeletal-bone model of the human leg based on FEM and to perform a simulation that would allow reproducing a cycle of the normal walk in satisfactory manner.
2. Methods
2.1. Skeleto-muscular model
As a first approach we have created a full-scale beam model of the limb. The bones have been modeled as beam elements with a defined cross-section area, quadratic moments and density. The individual bones are connected by the coupling conditions allowing appropriate DOF of corresponding joints. The muscles were represented by bar-type elements. Our model takes into consideration 47 muscles that play the most important role during the natural movement. The translation DOF of femur/hip joint were fixed. For the foot, the appropriate load coming from the measuring platform was applied. For each bone element, mean elastic properties have been assigned, namely Young’s modules and Poisson’s ratio. The dead load was also applied by specifying the gravitational acceleration to the model.
2.2. Muscle activity
Muscles main functionality is dynamic contraction and relaxation to provide leg movements. In our case, all elements have the ability to change their length under the influence of a given parameters. The thermal expansion capacity of the elements used was exploited to reproduce both forces and muscular elongations (Creuillot et al. Citation2015). In the case of leg, the large displacements and rotations have to be considered. For this reason, the large strain theory or geometric nonlinearities must be considered. The following expression was adapted to calculate the muscular contractions:
where κ is the coefficient of the muscular contraction, E states for Young’s modulus of the segment and S(t) is its current cross-section area. Physiological CrossSection area of all muscles was used. The Young’s modulus and coefficient of muscular contraction are adjustable parameters. The value of l0, l(t), and F(t) correspond to the initial and current muscle lengths and muscular force. They were obtained from the calculations made with OPENSIM. The model was implemented under ABAQUS environment.
3. Results and discussion
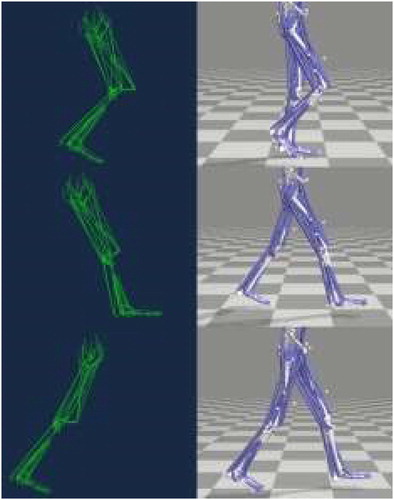
The results for the most important instants are illustrated in . Comparison of the position of the right leg at different time intervals attests that the obtained movement is consistent with OPENSIM model. As a consequence, the elongation of each muscle is correctly reproduced for the whole gait cycle.
Figure 1. Model of walking gait (left - FEM, right - OPENSIM) for three particular moments of cycle.
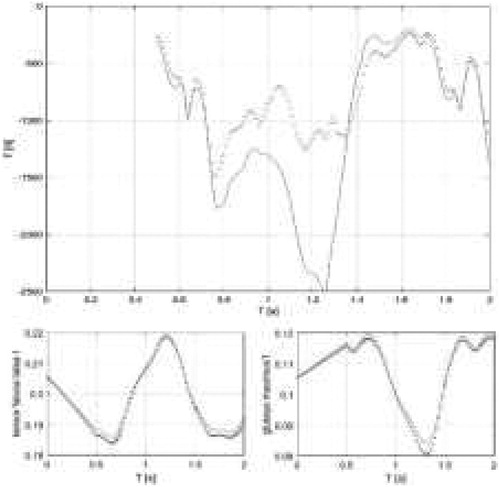
The correctness of our simulations was also verified by comparing the obtained reaction forces in the hip joint with the OPENSIM results. This force directly shows how the body mass, muscles activity and the ground reaction are transferred to entire limb. The value of the reaction force as a function of time for the whole simulated cycle (start of the movement is excluded from the analysis) is shown in . The vertical component of the hip joint reaction force obtained from the FEM computation has a slightly underestimated value, especially in the time interval from 0.7 to 1.3 s during which the foot contacts to the ground. This is due to the fact that in the FEM model bone is considered as a flexible body, which is not the case in OPENSIM where the bone is treated as a rigid element. Changing bone parameters to be more stiff causes the response to be closer to that obtained from OPENSIM.
Figure 2. Magnitude of the reaction force in hip joint predicted by FEM (red dot-line) and OPENSIM (blue line) (top figure). Elongation correctness of tensor fasciae latae and gluteus maximus muscle during full gait cycle (bottom figures).
4. Conclusions
The paper presents a musculoskeletal model of the lower limb made in FEM ABAQUS environment. Based on data from the OPENSIM package, a model reproducing muscular forces and elongations has been developed. The FE computations show that the obtained movement of the whole limb is accurate, i.e., in accordance with the backward kinematics provided by the method. At the same time, the compliance of reaction forces in the hip joint and the strength of individual muscles were obtained. This model will be used in the next future to simulate the stress and strain fields in 3 D bone model deduced from CT data.
Additional information
Funding
Notes
References
- Phillips AT, Villette CC, Modenese L. 2015. Femoral bone mesoscale structural architecture prediction using musculoskeletal and finite element modelling. Int Biomech. 2(1):43–46.
- Creuillot V, Dreistadt C, Kalinski KJ, Lipinski P. 2015. Mechatronic design towards investigation of the temporo-mandibular joint behavior. Adv Intell Syst Comput. 414:15–32.