
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.1. Introduction
The development of advanced orthosis requires the knowledge of the forces that can be generated by the human body. This study focuses on the forefinger joint. The aim is to estimate the maximal moment capacity of a finger at different bending angles. Recently, devices have been designed to measure the forefinger force (Miller et al. 2009; Kim et al. 2011) but they can only measure the grasping forefinger force in a specific position. The present study describes a custom experimental device that enables to evaluate the forefinger bending moments at different angles. Next, the results obtained for thirty subjects are presented. The results were analysed by the PCA statistical method to identify three main behaviour modes.
2. Methods
2.1. Experimental set-up
Considering a two steps test, a device was designed in order to measure the maximum bending moment of the forefinger Proximal Inter-Phalangeal (PIP) joint. It consists of a rigid arc and a load sensor that can be fixed according to the arc centre at different angles as presented in . The hand is fixed to the arc so that PIP joint can move freely.
Figure 1. Experimental Set-up.
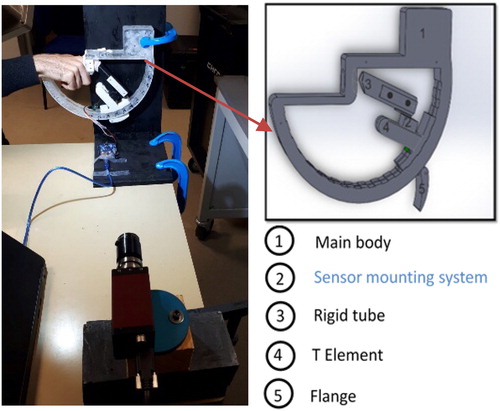
In the first step, a camera is used to track the trajectory of the finger in order to determine the centre of the joint, as it could be different for different individuals undergoing the test. Considering the moment as the cross product of the force and distance vector, the centre of this joint is required to be determined first in order for the maximum reactive moment in the joint to be measured.
In the second step, the distal and the middle phalanxes of the forefinger are inserted into a rigid cylindrical tube resting on the sensor. The forefinger was pushed on the resting point in order to assess the force, each time. The system limits any movement of the Distal Inter-Phalangeal (DIP) joint, and constrains subsequently the distance between the joint centre and the force application point. Knowing the distance of the forefinger pushing point to the centre of the joint and the amount of the force, we can calculate the moment.
The sensor used in this study was a miniaturized capacitive-force type (SingleTact sensing technology). Its dimeter is 8 mm and it has a measuring force range of 30 N. It was supposed for this force range to be proper for the forefinger’s specifications, which proved to be true by the experiments. The digital data was retrieved using a SingleTact software associated with the sensor.
This device was used to test thirty healthy subjects (male and female with different ages). For each subject nine angles (between 0 and 90 degrees) of the joint were tested. Each test was repeated three times in order to study the reproducibility of the results. Between each two tests a break of 2 minutes is given to the subjects.
3. Results and discussion
3.1. Bending moments results
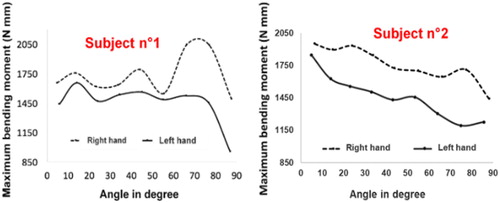
The initial analyses show that our investigations are generally subject-specific. According to the experimental results, the bending moment depends on the angle of the PIP articulation and specific characteristics of the subject, e.g., gender, age, physical conditions, etc.
It is illustrated by , which shows two different diagrams presenting the changing of the maximum bending moment versus the angle of the joint for two different subjects.
Figure 2. Changing of the maximum bending moment versus the angle of articulation for different subjects.
In addition, some experiments were performed in order to take the concept of reproducibility into account, aimed at checking the experimental results in terms of the reliability for one subject. The results showed the same trend for the different tests.
3.2. Statistical analyses
In order to make some investigations on our results and gain better understandings of the different behaviours of the subjects, a Principal Component Analysis (PCA) was performed.
As we aimed to characterize the experimental results associated with the individual tests in terms of statistical specifications, this method was adopted. It allowed us to describe the behaviour of each individual based on the linear combination of a number of simple modes. Each mode would be based on a specific eigenvalue of the results matrix, composed of the values of the maximum bending moments for the subjects undergoing the test.
Therefore, PCA allows for statistically approximating the maximum bending moment based on the eigenvalues of its matrix, as follows:
(1)
(1)
where
and
are the maximum bending moment, the data eigenvector, the multiplicative coefficients of the eigenvectors and the average value, respectively. N is the number of eigenvector used to reconstruct the data. In this study, N = 9 provides a perfect reconstruction.
Considering the dominant and non-dominant hands, this method was applied to a population of 30 subjects, among which there were 18 men and 12 women.
Then the eigenvectors and eigenvalues for the PCA of the whole population were determined. The results are shown in , in which the first three modes contain almost all the information; they explain 98.1% of the data variance.
Table 1. Results of the PCA of the whole population for reconstruction of the maximum bending moment.
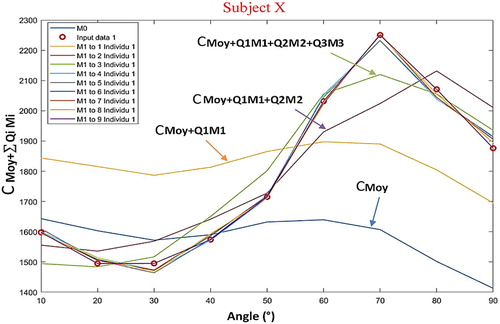
represents the maximum bending moment as a function of one the subject’s bending angle. The red circle curve is the experimental data. The blue curve shows the average curve The signal approximation
(equation 1) was then computed by increasing N by step of 1. It confirms for this subject that N = 3 provides a satisfying approximation of the measurement.
Figure 3. Recontruction of a subject with the modes of the PCA analysis.
4. Conclusions
The maximum bending moment depends both on the specifications of the subject and the angle of the PIP. Using the statistical PCA method allows to approximate the behaviour of each subject based on the linear combination of three dominant simple modes. The maximal bending moment of each subject can thus be described using only three parameters.
Finally, the orthosis stiffness should be a function of its angular configuration. These results will be used later to design patient-specific orthosis.
References
- Kim HM, Yoon J, Shin HS, Kim GS. 2011. Development of cylindrical-type finger force measuring system using force sensors and its characteristics evaluation. Mech Syst Sig Process. 27:513–522.
- Miller LC, Ruiz-Torres R, Stienen AH, Dewald JP. 2009. A wrist and finger force sensor module for use during movements of the upper limb in chronic hemiparetic stroke. IEEE Trans Biomed Eng. 56(9):2312–2317.