
1. Introduction
Maximal voluntary contraction (MVC) has long been considered as the best measure of neuromuscular performance. However, when MVC is paired with electromyographic (EMG) activity recording it has been well demonstrated that both agonist and antagonist muscles are activated. Generally, the coactivation level is determined from the ratio between the EMG activity of a muscle acting as antagonist and the EMG activity of the same muscle acting maximally as agonist. Nevertheless, this EMG coactivation level does not appropriately and sufficiently reflect the mechanical impact of the antagonist torque (Billot et al. Citation2010). At the ankle joint, it has been previously demonstrated that for a same level of coactivation, the antagonist torque exerted is significantly dependant on the action (i.e., plantar- or dorsiflexion (DF)). However, all these data were collected in isometric conditions.
It has been reported that coactivation level appeared not action mode dependent, while maximal contraction showed greater strength in eccentric than isometric than concentric condition. Consequently, eccentric contraction has been considered more efficient than isometric and concentric contraction in both maximal and sub-maximal condition. However, no data are available to appreciate the mechanical component of this coactivation during dynamic condition. The main goal of this experiment is to quantify the antagonist torque exerted by antagonist muscles during maximal voluntary dorsiflexion in eccentric, isometric and concentric condition. Since eccentric contraction seems more efficient than isometric and concentric action mode, notably in sub-maximal contraction, it was expected that antagonist torque is greater during maximal concentric than eccentric MVC.
2. Methods
Nine young adults (26.1 ± 2.7 years; 1.78 ± 0.05 m; 73.4 ± 6.5 kg) volunteered to participate of the two experimental sessions of this study. Subjects were seated with a knee angle of 120° (180° correspond to the full extension) and hip angle at 100°. The MVCs in DF were measured in isometric condition at 0° (perpendicular angle between the foot and the tibia). The MVCs in DF were also measured in concentric and eccentric condition at -10°.s−1 (eccentric condition) and +10°.s−1 (concentric condition) with a range of motion of 30°. The contraction mode were randomized to avoid any systematic effects. EMG activities from the soleus, gastrocnemius medialis, gastrocnemius lateralis and tibialis anterior muscles were recorded.
To estimate antagonist torque, the EMG biofeedback method was used (Billot et al. Citation2010). Participants were asked to maintain a level of EMG activity according to the visual bio-feedback displayed on a screen. Participants had to perform two trials in isometric and ten trials for each action type in dynamics conditions.
Agonist torque is deduced by the addition of the estimated antagonist torque to the recorded resultant torque depending on the action mode. The data are presented as means ± SD. The reliability of our measurement was tested with the Intra-Class Correlation (ICC) between sessions. Since the reliability was excellent (>0.8), the following data were analyzed and presented as a mean of the two sessions. A twoway ANOVAs with repeated measures examined the effect of the considered MVC (resultant vs. agonist), and the mode of contraction (eccentric, isometric, concentric) on DF MVC. A one-way ANOVA with repeated measures was realized to assess the effect of action mode (eccentric, isometric, concentric) on TS antagonist torque.
3. Results and discussion
Results are presented in the .
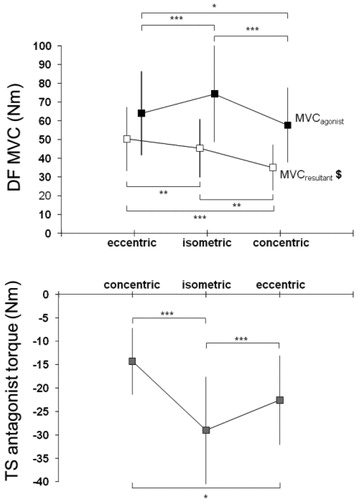
Figure 1. Upper panel: Resultant and Agonist MVC in eccentric, isometric and concentric action mode. Lower panel: Antagonist torque in the three action mode. $p <.001, significant difference between resultant and agonist MVC. *** p <.001, ** p <.01. * p <.05, significant different between action mode.
3.1. Resultant and agonist DF MVC
For all action modes, resultant MVC was significantly lower than agonist MVC (p < .001). Results showed that resultant MVC in eccentric was greater than isometric (p = .025) and concentric (p < .001); and isometric MVC was greater than concentric MVC (p < .001). Further, our results indicated that agonist MVC in isometric was greater than eccentric (p < .001) and concentric (p < .001); and eccentric MVC was greater than concentric MVC (p = .004).
3.3. TS antagonist torque
Analysis showed that antagonist torque in isometric (29.0 ± 11.4 Nm) was greater than eccentric during concentric MVC (22.6 ± 9.5 Nm, p < .001) and concentric during eccentric MVC (14.3 ± 7.1 Nm, p < .001). The results also showed that antagonist torque was greater in eccentric during concentric MVC than concentric during eccentric MVC (p < .001).
4. Conclusions
The current study showed that antagonist mechanical impact is related to the action mode. More specifically, our results revealed that agonist MVC is greater in isometric than in eccentric than in concentric action mode. This result indicated that the MVC-Velocity relation was modified by antagonist torque consideration. These results obtain in vivo does not support results obtained in vitro. In fact, it has been well documented, according to the force-velocity relation of whole muscle or single fibre, that remarkable higher force can be developed during lengthening (eccentric) than shortening (concentric) or static action mode (isometric) (Katz Citation1939). Although the lengthening contraction force represents 1.4-1.9 times than isometric in vitro studies (Katz Citation1939), previous human studies reported light increases (Duclay et al. Citation2011) or no change (Amiridis et al. Citation1996) in eccentric in comparison with isometric MVC. While the shape of the force-velocity relation depends only on muscular factors in isolated fibre, both neural and muscular characteristics contribute to produce MVC in human being. The neuromuscular performance evaluation has to consider antagonist torque, notably in dynamic condition, to purpose tailored training or rehabilitation program. More studies are needed to distinguish the modulation mechanisms involved in agonist and antagonist activation during the different action mode.
Acknowledgments
We like to express our gratitude to Yves Ballay and Robin Salesse for their technical support.
References
- Billot M, Simoneau E, Van Hoecke J, Martin A. 2010. Coactivation at ankle joint is not sufficient to estimate agonist and antagonist mechanical contribution. Muscle Nerve. 41(4):511–518.
- Katz B. 1939. The relation between force and speed in muscular contraction. J Physiol. 96(1):45–64.
- Duclay J, Pasquet B, Martin A, Duchateau J. 2011. Specific modulation of corticospinal and spinal excitabilities during maximal voluntary isometric, shortening and lengthening contractions in synergist muscles. J Physiol. 589(11):2901–2916.
- Amiridis IG, Martin A, Morlon B, Martin L, Cometti G, Pousson M, van Hoecke J. 1996. Co-activation and tension-regulating phenomena during isokinetic knee extension in sedentary and highly skilled humans. Eur J Appl Physiol. 73(1-2):149–156.