
1. Introduction
Human walking relies on a complex cyclic whole-body organization that involves many degrees of freedom, numerous muscles, and is intrinsically unstable. Many studies have described this motion at the kinematic, kinetic or dynamic levels. However, if researchers have accurately detailed the different sequences of the normal gait cycle, the criteria that underlie its coordination are still poorly understood. Some studies have simulated the gait by focusing on the motion of the lower limbs. Other works have proposed to simulate whole-body motions during gait using direct kinematic (Rajagopal et al. Citation2016), optimal control (Felis and Mombaur Citation2016) or hierarchical control (De Lasa et al. Citation2010). However, few of them have tried to identify simple organizational principles to generate the walking motion and compare the obtained simulated results with the reference human data.
In this paper, we propose to use the hierarchical tasks framework used in humanoid robotics for simulating the human gait from a reduced set of ordered tasks. We simulated human gait with a whole-body model using hierarchical control, and compared the simulated motion with experimental data obtained from a motion capture system. We hypothesized that the control of a reduced set of low-dimensional key tasks could lead to closely reproduce the human gait.
2. Methods
2.1 Subject and data
One healthy man volunteered for this study (age: 24 yr, height: 1.75 m, mass: 78 kg), the data was extracted from (Carpentier et al. Citation2017) database. Kinematic data was collected using 12 infrared cameras sampling at 200 Hz (Vicon, Oxford Metrics, Oxford, UK) recording 48 reflective markers placed on the subject, based on the International Society of Biomechanics (ISB) recommendations. Data was extracted and filtered with a 4th order butterworth filter after a residual analysis. Scaling parameters were computed according to Dumas anthropomorphic table (Dumas et al. Citation2007).
The reference data that was used to benchmark the simulation results were extracted from the computation of the inverse kinematics with Opensim.
2.2 Model
A 3 D whole-body skeletal model, involving 42 degrees of freedom (Dofs) () was used to simulate and analyze the gait cycle. The model was frictionless as proposed in (Maldonado et al. Citation2018) ().
Figure 1. Snapshots of the simulated walking: (a): Initial contact: right heel contact, (b): Left toe-off, (c): Opposite initial contact: left heel contact.
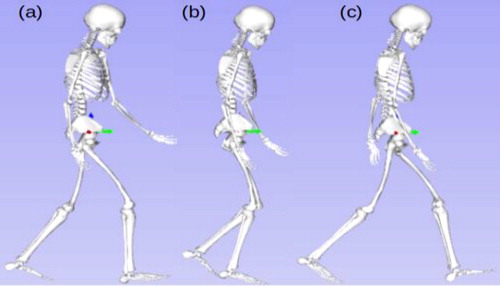
Table 1. Degrees of freedom in the whole-body model.
2.3. Gait simulation
As for the human body, the proposed anthropomorphic model is for the majority of tasks a highly redundant system. To manage this redundancy we used a Hierarchical Quadratic Programming solver (HQP) (Escande et al.) to simulate the gait. Given selected trajectory tasks as input, we applied the HQP second-order inverse kinematics, which computes the accelerations of the segments to generate the expected motion. The gait cycle was split into four phases: two single support phases, and two double support phases. This decomposition is induced by the main support phases identified in the normalized walking cycle. The human gait, was simulated by using the following data as input:
The three-dimensional centre of mass trajectory of the whole-body.
The projection of the heel path of the swinging foot in the transverse plane.
Final joint positions, (i.e.: matrix shape 1*42) at the end of each phase.
Considering that human subjects preferentially controlled the successive positions of their feet when walking, we have chosen to use as a reference the projection of the heel in the transverse plane, without considering its height. On the other hand, we have chosen to keep the three-dimensional centre of mass trajectory as a reference because it is highly related to the whole-body configuration during the walking. Thus, the hierarchy applied throughout our simulation was defined by the following tasks priority order:
1st: Trajectory of the projection of the heel of the swinging foot in the transverse plane + fixed position of the projection of the heel of the stance foot in the transverse plane.
2nd: 3D trajectory of the whole-body centre of mass.
3rd: Final joint positions.
Therefore, the height of the swinging foot was not constrained and resulted from the control of the height of the body centre of mass. The simulated gait cycle obtained with this hierarchical motion generation approach was then compared to the subject experimental data measured during one cycle. For this comparison we used several metrics, which are: the Root Mean Square Error (RMSE) that provides the overall error between the reference and the simulation, the correlation coefficient of Pearson (r), which presents a measure of the intensity and the direction of the relationship between the reference and the simulation, and the range of motion (ROM).
3. Results and discussion
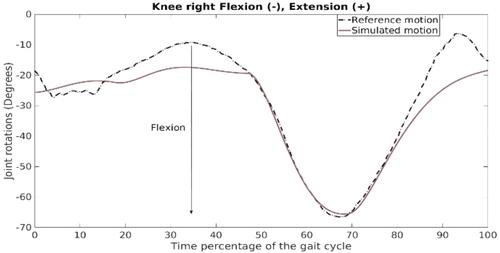
As a preliminary result, we were able to obtain a human-like kinematic walking motion using a subsentially low number of constraints, regarding to previous works in the literature (see ). We analyzed the “hip, ankle, knee and shoulder” joint rotations. The simulation results were consistent with experimental reference data. As an example, we present here the flexion-extension of the knee, which constitutes a major feature of bipedal walking. provides a comparison of the simulated and the reference flexion-extension of the right knees, during one walking cycle. During the flexion phase, the simulation correctly follows the reference. However, the maximal extension of the knee observed for the reference is not entirely reproduced by the simulation. The computed RMSE is 5 degrees. Also, the computed (r) between the reference and the simulation is 0.97, which shows a strong correlation between the two gaits. The ROM of the knee was: 60 degrees for the reference and 48 degrees for the simulated motion. The difference of 12 degrees is induced by a lack of maximal knee extension during the simulation. These results show that controlling only a few degrees of freedom, we can generate a gait close to the human one. It is a well-known idea in human motor control that complex motions should be generated by a reduced set of primitive elements (Ijspeert et al.). Several representations such as, central pattern generators, motion primitives or synergies have been developed in this direction. We believe that the concept of tasks hierarchy used in robotics to cope with redundancy, notably in humanoid robotics, is closely related to these concepts. The work presented in this paper provides an efficient application of this approach to human waking.
Figure 2. Joint rotations of the right knee: flexion (-), extension (+).
4. Conclusions
In this paper, we generated human gait using the hierarchical task framework usually developed for humanoid robots control. A hierarchy of tasks was applied to a whole-body model for gait motion generation.
It was possible to reproduce a trajectory close to the reference human walking by controlling a small number of low dimensional ordered tasks. The results of the comparison of the simulated rotation of the joint with the human experimental data confirm that the control proposed in our method is closely related to the one exerted by the central nervous system during human walking. In order to study the robustness and the reliability of our assumption in a future study, we will apply this task hierarchy to a larger panel of subjects, and study in more details the 3D joint rotations.
References
- Carpentier J, Benallegue M, Laumond JP. 2017. On the centre of mass motion in human walking. Int J Autom Comput. 14(5):542–551.
- De Lasa M, Mordatch I, Hertzmann A. 2010. Feature-based locomotion controllers. ACM Trans on Gra.
- Dumas R, Chze L, Verriest JP. 2007. Adjustments to McConville et al. and young et al. Body segment inertial parameters. J Biomech. 40(3).
- Escande A, Mansard N, Wieber PB. 2014. Hierarchical quadratic programming: fast online humanoid-robot motion generation. Int J Robot Res.
- Felis ML, Mombaur K. 2016. Synthesis of full-body 3-d human gait using optimal control methods. IEEE Int Conf Robotics and Automation, pp. 1560–1566.
- Ijspeert A.J, Nakanishi J, Hoffmann H, Pastor P, Schaal S. 2013. Dynamical movement primitives: learning attractor models for motor behaviors. Int J Neural Comput. 25(2):328–373.
- Maldonado G, Bailly F, Souères P, Watier B. 2018. On the coordination of highly dynamic human movem.
- Rajagopal A, Dembia CL, DeMers MS, Delp DD, Hicks JL, Delp SL. 2016. Full-body musculoskeletal model for muscle-driven simulation of human gait. IEEE Trans Biomed Eng. 63(10):20682079.