
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.1. Introduction
In most of our daily movements and in particular when pointing toward a target placed beyond the arm’s length, we are faced with a dual task: controlling balance and controlling another – focal – movement, in this example, the position of the hand (Bouisset and Do Citation2008). This need to simultaneously control these two components may become a significant problem with aging as the elderly often show impaired balance control and impaired abilities to perform dual tasks (Woollacott and Shumway-Cook Citation2002).
Detailed analysis of the variability of the body segment positions allows the examination of the control of predefined performance variables. The Un-Controlled Manifold (UCM) approach has emerged as a sensitive quantitative method to evaluate the ability to control and stabilize a task-specific performance variable (Lewis et al. Citation2016).
In the present study, we used this approach to quantify the control of the whole-body center of mass (COM) and of the end-point (EP, the finger) positions when pointing toward a target placed beyond the arm’s length. We hypothesized that the presence of a precision constraint – i.e., pointing toward a small target vs. no target – would increase the focus of attention on the control of the hand position and therefore, impair the control of the COM position. We further tested the hypothesis that pointing while seated, that is, when reducing balance difficulty, would be associated with less precise control of the COM position.
2. Methods
2.1. Participants
Thirteen healthy elderly people (2 males) volunteered for the study (age: 66.7 ± 5.1 years). They signed an informed consent form before the experiments. All subjects were right-handed.
2.2. Protocol
The kinematics of 27 passive markers (according to a modified model from Tisserand et al. Citation2016) were recorded with a 12-camera motion-capture system (VICON, Oxford, UK) at a sample rate of 100 Hz.
Subjects were standing upright with their arms hanging loosely at the sides and with their feet shoulder-width apart. They were instructed to point with their right finger toward a target placed in front of them at the level of their shoulder and at a distance corresponding to 70% of their height. Such a distance forced them to bend the trunk forward. The target was located in the frontal plane at the level of the moving hand. In order to vary the stability and precision constraints, the task was performed in two postural – standing and seated – and two precisions – without a target and with a small target (a 5 mm diameter marker) – conditions. The conditions were presented in a randomized order. A total of 15 trials were performed for each condition.
The subjects were instructed to point toward the target or toward the target support (no-target condition) with the index finger and to remain as stable as possible for 2 seconds in the final position. They were asked to perform the movement at their preferred speed.
2.3. Data analysis
Kinematics analysis was performed in 2 D (sagittal plane). The body was modeled as a kinematic chain consisting of 12 rigid segments (the right finger, the two hands, arms and forearms, the head, trunk, thigh, leg and foot) with 11 degrees of freedom (joint angles). Joint angles were obtained by inverse kinematic (global optimization from custom-written software using Matlab R2018b, MathWorks, Inc.).
Movement onset was defined as when the EP tangential velocity exceeded 3% of its maximum. Movement offset was identified as when CoM velocity exceeded 3% of its maximal velocity in its backward movement.
We performed the analysis at discrete movement times expressed as percentages of the total movement duration (onset = 0% and offset = 100%).
At each time, the Jacobian of the 2 D position – sagittal plane – of either the EP or the COM relative to the joint angles and at the mean joint configuration across trials was computed (2-by-11 matrix). Variance of the joint angles across trials was computed (VTOTAL). VTOTAL was then separated into VUCM and VORTH by projecting the joint angle data onto the null space (UCM) of the Jacobian and on the space orthogonal (ORTH) to it, respectively. The index ΔV was computed as: with l and m the dimensions of the UCM and ORTH spaces, respectively (Latash et al. Citation2007). High ΔV means that joint angles vary mainly in the UCM subspace, suggesting that the variable (EP or COM) is highly controlled.
2.4. Statistics
Normality of the data was verified using Shapiro-Wilk’s tests. As ΔV is bounded, it was normalized between 0 and 1 and then was Fischer’s Z-transformed before statistical analysis. The effects of time, precision and posture (standing vs. seated) were assessed using repeated measures ANOVAs. Post-hoc tests were performed using Bonferroni’s method. Alpha level was set to 0.05. Data are presented as Z-transform value mean ± SD.
3. Results and discussion
Considering all time frames, ΔVCoM was greater than ΔVEP (; p < 0.001). ΔVEP typically decreased by ∼40% at the start of movement with a profile roughly resembling the (inverted) hand velocity profile. ΔVEP then increased until a maximum, reached at the end of movement. Conversely, ΔVCoM did not vary significantly with time (p > 0.05).
Figure 1. Time evolution of the synergy indexes.
*Indicates the periods at which ΔVEP differed from ΔVCoM (* p < 0.05, ** p < 0.01, *** p < 0.001).
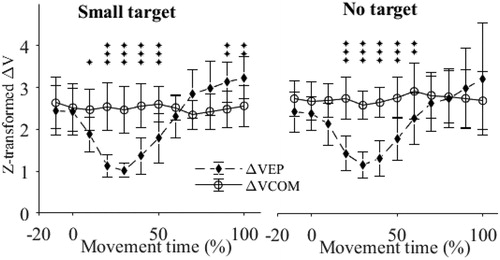
A drop in synergy index represented a decrease in the stabilization of the variable.
ΔVCoM was not affected by the postural conditions nor by precision (p > 0.05; ).
Figure 2. Time-averaged ΔVCoM.
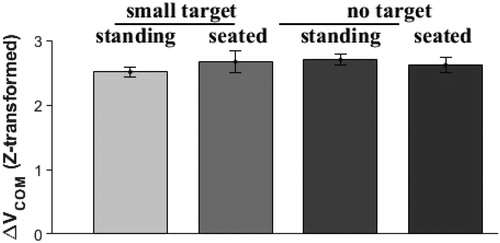
The results did not corroborate our hypotheses: imposing a constraint on the precision of the pointing task did not significantly affect the control of the COM (). Modifying the postural constraints (seated vs. standing) did not affect the control of the COM either. However, ΔVEP was higher than ΔVCOM at the end of movement in the small-target condition while no difference was found in the no-target condition (). Close observation of suggests that a small increase in ΔVEP and a concomitant small decrease in ΔVCoM occurred at the end of movement (60-80%). This would indicate that an interaction was indeed present between the two variables at the end of movement. In other words, an increase in the control of EP in the small-target condition might have affected the control of COM.
Nonetheless, the absence of significant differences in ΔVCoM can be interpreted as a robust control of the COM despite the precision constraint. The absence of effects when modifying stability constraints further suggests that COM control is robust to change in task constraints.
4. Conclusions
During beyond-the-reach movements in healthy elderly people, the position of the whole-body center of mass is robustly controlled despite changes in postural or precision constraints. The data also suggest that COM position is under a continuous and robust control throughout the movement, while the control of hand position depends on movement phase.
Additional information
Funding
References
- Bouisset S, Do M-C. 2008. Posture, dynamic stability, and voluntary movement. Neurophysiol Clin. 38(6):345–362.
- Latash ML, Scholz JP, Schöner G. 2007. Toward a new theory of motor synergies. Motor Control. 11(3):276–308.
- Lewis MM, Lee E-Y, Jo HJ, Du G, Park J, Flynn MR, Kong L, Latash ML, Huang X. 2016. Synergy as a new and sensitive marker of basal ganglia dysfunction: a study of asymptomatic welders. NeuroToxicology. 56:76–85.
- Tisserand R, Robert T, Dumas R, Chèze L. 2016. A simplified marker set to define the center of mass for stability analysis in dynamic situations. Gait Post. 48:64–67.
- Woollacott M, Shumway-Cook A. 2002. Attention and the control of posture and gait: a review of an emerging area of research. Gait Post. 16:1–14.