
1. Introduction
Robotic exoskeletons are promising devices to assist operators in the industry sector and prevent musculoskeletal disorders. With such devices, typical load lifting tasks can be performed with less effort for the operator. She/he would just have to guide the motion of the exoskeleton, usually set in ‘transparent’ mode. In the most basic and robust implementation of this mode, the exoskeleton compensates its own weight (plus the weight of any attached load) and frictions. From a human-centered point of view, such an interaction leads to a quite unfamiliar dynamic situation. Indeed, in daily life, our central nervous system (CNS) has to deal with both static and dynamic forces acting at the joints. During object manipulation, gravitational torque (GT) scales with inertial torques (IT) because gravitational and inertial masses are the same. In contrast, with a ‘transparent’ exoskeleton, this implicit relationship is altered because the operator feels the additional inertia of the robot (and potential additional loads) without any associated weight increment. Given that GT and IT are major constitutive components of upper-limb dynamics, understanding how humans adapt to such unfamiliar perturbations in practice is critical. In motor control, adaptation to a weight load at the hand (incrementing GT and IT together) is quasi-instantaneous as it corresponds to a familiar dynamic situation (Bock Citation1992). However, adaptation to unfamiliar dynamic conditions can take tens to hundreds of trials (Ingram et al., Citation2011). Previous studies on weight load perturbations (Bock Citation1992), force field adaptation (Kurtzer et al. Citation2005), grasping forces (Zatsiorsky et al. Citation2005) or weightlessness (Gaveau et al. Citation2016) suggest that the CNS has internal models dissociating GT and IT. This could allow conforming efficiently and rapidly to novel gravito-inertial dynamics. However, moving objects with inertia but no apparent weight, as in a human/exoskeleton interaction, is quite uncommon on earth and it may well disturb human motor control (Bastide et al. Citation2018). Given the unfamiliarity of such a perturbation, it is therefore reasonable to expect that the CNS would need few trials to adapt to its motor controller. Thus, the aim of this study is to analyze the adaptation to a ‘transparent’ upper-limb exoskeleton during simple elbow flexion/extension movements, given that the exoskeleton induces a relative modification of GT and IT during the task.
2. Methods
2.1. Participants
Twenty-one healthy right-handed young adults (7 females, 14 males) participated to this study. Mean age, height and weight were 24.9 ± 4.7, 175.7 ± 8.4 cm and 68.9 ± 11.1 kg, respectively. Written informed consent was obtained from each participant in the study as required by the Helsinki declaration. The local ethical committee for research (Univ. Paris Saclay) approved the experimental protocol.
2.2. Materials
The ABLE upper-limb exoskeleton was used in this experiment (Gaveau et al. Citation2016). The mass and the length to the center of mass of its forearm segment were 2.32 kg and 11 cm. The elbow joint position was recorded from the exoskeleton sensors. We also recorded surface electromyographic (EMG) data of two flexors muscles (biceps brachial, brachioradialis) and two extensors (triceps brachial lateral head, triceps brachial long head). EMG signals were collected using wireless sensors (Biometrics Ltd, UK). Both kinematic and EMG signals were sampled at 1000 Hz.
2.3. Procedure
Participants sat straight with their back leaning against the rigid base of the exoskeleton. The participant’s right forearm was attached to the exoskeleton at wrist level. Alignment of elbow centers of rotation of the participant and the exoskeleton was adjusted by calibrating the height of the whole robotic device. Participants were asked to perform point-to-point reaching movements between two lighting targets (LED), involving 60° elbow flexion/extension movements. Exoskeleton joints other than the elbow were frozen to ensure that movements could only be performed with the forearm. Participants were instructed to point in the direction of the target that lit up. The target remained on for one second before it turned off. To get discrete movements, a random pause duration of 1 to 2.5 seconds was displayed between each movement. Overall, each participant performed 50 flexions and 50 extensions of the elbow. The exoskeleton control law was set to compensate its own frictions and GT (but not its IT).
2.4 Data processing
Angular velocity and acceleration were obtained by numerical differentiation of the recorded angular positions. The movement was considered effective when the elbow angular velocity exceeded 5% of the maximum. Flexors and extensors muscles were respectively grouped and averaged. Muscle activations were expressed as a percentage of the maximal data obtained during the experiment. The last 40 trials have been used to define the 95% Confidence Interval of the Plateau (CIP).
3. Results and discussion
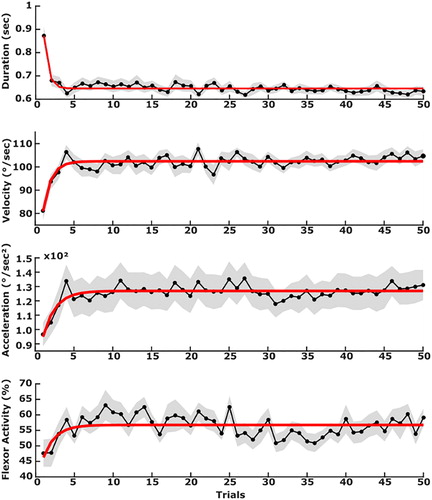
Red lines represent data exponential fitting.
3.1. Kinematics
Duration of the three firsts movements were significatively different from the subsequent ones according to the predefined CIP (see ). The mean velocity and the mean maximal acceleration are also significantly lower for the three firsts flexions. Same observations were made for extensions. Thus six full movements, i.e. flexion and extension, were necessary to conform to the new gravito-inertial dynamics situation. Moreover, a higher overshoot (6.83 ± 3.4°) was found only for the very first flexion compared to overshoot CIP ([1.6°, 2°]), showing a rapid adaptation process to achieve the task.
Figure 1. Mean duration, velocity, maximal acceleration and maximal elbow flexor activity (±SE) during elbow flexion movements for all participants.
3.2. Muscle activity
Agonists muscular activations followed the same trend, with only the very first flexion being out of the maximal activation CIP (see ). Concerning extensors, maximal activation (33 ± 15.2%) was also out of the CIP ([51.2%, 53.6%]) only for the first extension, suggesting that participants underestimated the inertial mass being manipulated during the very first movement of flexion/extension (likely because it could not be inferred from the exoskeleton weight).
4. Conclusions
This study aimed at analyzing the human adaptation to modified gravito-inertial dynamics induced by an upper-limb exoskeleton. Participants needed one to three flexion/extension movements to adapt to the ‘transparent’ mode of the exoskeleton. Thus, our initial hypothesis was confirmed, i.e. adaptation to a transparent exoskeleton is rapid but not as immediate as in classical load lifting tasks. Future work will investigate human adaptations to other control modes, e.g. compensation of the user’s arm weight.
References
- Bastide S, Vignais N, Geffard F, Berret B. 2018. Interacting with a “Transparent” Upper-Limb Exoskeleton: A Human Motor Control Approach. Proc IEEE IROS. 4661–4666.
- Bock O. 1992. The characteristics of arm movements executed in unusual force environments. ASR. 12(1):237–241.
- Gaveau J, Berret B, Angelaki DE, Papaxanthis C. 2016. Direction-dependent arm kinematics reveal optimal integration of gravity cues. eLife. 5:e16394.
- Ingram JN, Howard IS, Flanagan JR, Wolpert DM. 2011. A single-rate context-dependent learning process underlies rapid adaptation to familiar object dynamics. PLoS Comput Biol. 7(9):e1002196.
- Kurtzer I, DiZio P, Lackner JR. 2005. Adaptation to a novel multi-force environment. Exp Brain Res. 164(1):120–132.
- Zatsiorsky VM, Gao F, Latash ML. 2005. Motor control goes beyond physics: differential effects of gravity and inertia on finger forces during manipulation of hand-held objects. Exp Brain Res. 162(3):300–308.