
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.1. Introduction
In this article, we address the problem of predicting plausible locomotion given anatomical information, with a target application in palaeoanthropology.
Previous works have been proposed to optimize the relative trajectory of the ankle in the pelvis reference frame with per-frame inverse kinematics to retrieve the joint angles (Nicolas et al. Citation2009). However, this approach can lead to asymmetrical, non-periodic motion, and does not take the dynamics of the system into account.
Dynamic simulation of bipedal gait has mostly been investigated in robotics using optimal control (Boukheddimi et al. Citation2019). It generally requires knowledge on the motion pattern (named walking pattern generator) and may lead to unnatural (i.e., robotic) motion.
In this article, we propose to adapt previous works (Nicolas et al. Citation2009) to compute symmetric and periodic plausible gait for a given skeletal model, with a minimal set of hypotheses.
2. Methods
2.1. Simulation
The inputs of the method are: (1) the anatomical model of the bipedal character (joint centres, dimensions, joint axes, boundaries, degrees of freedom, mass and inertia of each body segment) leading to 11 degrees of freedom (3 rotation for the pelvis, each hip, and one DOF for each knee), and (2) footprints provided by paleoanthropologists according to fossil trackways. The outputs are the corresponding joint angular trajectories. The anatomical model and the footprints are supposed to be symmetric, and the resulting plausible gait is consequently supposed to be symmetric and cyclic. Due to the redundancy of the system (11 DOFs over time for three 3 D footprint coordinates), an infinity of solutions exists.
To simplify the problem, we propose to model angular trajectories as parametric curves based on control points (CP), as suggested in (Nicolas et al. Citation2009; Moissenet et al. Citation2019). As we aim at simulating the walking pattern of various bipedal species, we cannot directly use CP coming from human locomotion. Hence, we have only selected CP at foot strike, foot-off, and maximum/minimum angular values, for each DOF. This leads to 26 non-weighted CP (denoted CPi). Each CP can be translated in time δt and space δd (CP′ = CP + δ, with δ = δt + δd) to produce new motion.
Simulation of a new gait could be viewed as tuning δ to minimize the error Δ between the resulting ankles position at foot strike, Xl(CP, tlFS) (left ankle position) and Xr(CP, trFS) (right ankle position), and the imposed footprints.
Among the solutions of this over-actuated problem, we have selected the ones that satisfy joint limits, and minimize angular momentum L (considered as minimized in natural walking). L is computed as the sum of individual segment angular momentums (Herr and Popovic Citation2008). The step duration is set to a constant value (1 s in our experiments). Knowing the footprints and the duration, the walking speed is consequently imposed to the simulation. The optimization problem becomes:
where Fr and Fl are, respectively, the next right and left footprints, and
a function computing the angular momentum of the gait cycle modelled with CP. We use prioritized optimization (compared to least square solving) to ensure that footprints are satisfied first, before minimizing the other cost functions (Nicolas et al. Citation2009). The initial CP values come from one motion capture example that is used to start the optimization process. In the final application to palaeoanthropology, we mean to input the gait of one species to simulate the gait of another species.
2.2. Experiments
To evaluate the performance of the simulation, we have compared the results obtained by the simulation with motion capture data, for a set of seven human subjects walking at increasing speeds (data reused from the article of Olivier et al. (Citation2011)). For each subject Si, we have built the anatomical model and the symmetric joint angle trajectories Mi,j. (motion j performed by subject i), with a total of 77 trials. First, we have compared the simulation and the motion capture data when the imposed target footprints correspond to the input angular trajectory modelled by splines. In this special case, simulation and motion capture should be similar. Then, we randomly selected one trial per subject to optimize it in order to walk into the footprints of all his other trials. We compared the resulting simulation to the actual motion performed by the subject during these other trials. To evaluate the similarity between simulation and motion capture joint angles, we computed the Root-Mean-Square error (RMS) and correlation R2. It enabled us to evaluate the performance of the system in retrieving the actual performance of the subject in different situations, and test potential risks of local minima in the optimization process.
3. Results and discussion
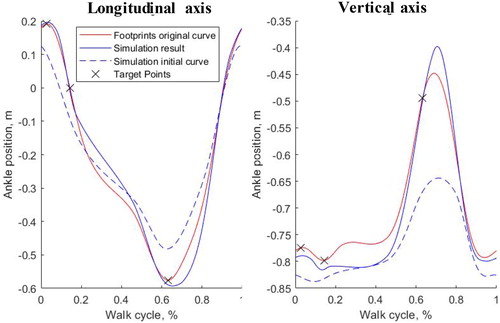
depicts a prototypic example of the longitudinal and vertical ankle displacement for the input motion (dashed blue), the target motion (red) and the resulting simulation (blue). The input motion is strongly modified by the optimization and tends to match the target ankle motion. It should be noted that the optimization was considered successful when the mean error between the simulated and input footprints (Δ) decreased down to 0.01 m. In the first case (applying footprints of motion Mij to the input trajectories of Mij) In the second case (applying footprints of Mij to input trajectories Mkl),
In this latter case, among the 77 evaluations, 23 tests failed to converge to a residual value Δ lower than 0.1 m, demonstrating potential local minimum problems.
Figure 1. Comparison between simulated (blue), initial input (dashed blue) and target (red) ankle motion. x: footprints constraints.
reports the mean correlation R2 between the original angular trajectories and the simulated ones per degree of freedom, for all the subjects and trials (mean 0.73 ± 0.14). One has to notice that most of the correlations are greater than 0.73, except for the pelvis rotation in the sagittal plane (R2 = 0.2). This rotation has no strong impact on the ankle position, which makes the simulation have less control on this angle. We also assessed if these correlations change from one subject to another. Generally, we observed consistent results, with correlations very close to the mean values reported in .
Table 1. Correlation (mean between simulated and target angular trajectories. DOFs: Pelvis rotation in the frontal (1), horizontal (2), and sagittal (3) planes, hip abduction (4), internal rotation (5) and flexion (6), and knee flexion (7).
4. Conclusion
The main contribution of this article is to adapt the method of Nicolas et al. (Citation2009): optimizing symmetric and cyclic parametric angular trajectories instead of per-frame inverse kinematics. Contrary to previous works such as (Moissenet et al. Citation2019), we have used a limited set of CP to impose as little knowledge as possible on the angular trajectories to address a wide range of species. In this article, we have minimized the angular momentum, but future works will explore other cost functions, such as minimizing Jerk or energy. We also wish to explore a wider range of anatomical data and styles (such as non-human primates). The results are encouraging, supporting that this method could provide interesting initial guesses for dynamic-based simulation in future works.
Additional information
Funding
References
- Boukheddimi M, Souères P, Watier B, Bailly F. 2019. Human-like gait generation from a reduced set of tasks using the hierarchical control framework from robotics. Proc. IEEE, Dec. 2019, (ROBIO) 2683–2688.
- Olivier A-H, Kulpa R, Pettré J, Crétual A. 2011. A step-by-step modeling, analysis and annotation of locomotion. Comp Anim Virtual Worlds. 22(5):421–433.
- Nicolas G, Multon F, Berillon G. 2009. From bone to plausible bipedal locomotion. Part II: Complete motion synthesis for bipedal primates. J Biomech. 42(8):1127–1133.
- Herr H, Popovic M. 2008. Angular momentum in human walking. J Exp Biol. 211(Pt 4):467–481.
- Moissenet F, Leboeuf F, Armand S. 2019. Lower limb sagittal gait kinematics can be predicted based on walking speed, gender, age and BMI. Sci Rep. 9(1):9510.