
1. Introduction
The biomechanics of cycling has been examined extensively from different perspectives. It had been shown that a non-seated position increases force production capability of the lower limb and more effectively transfers the force developed by the hip extensors and ankle plantar flexors to the crank, which, in return, reduces mechanical loads on the knee joint (Caldwell et al. Citation1999). Questions remain about the application of those studies done on a static ergometer in the field. Indeed, in a non-seated posture, cyclists sway their bike laterally underneath their body and this may affect the power generating profile of different joints (Soden et al. Citation1979). In addition, slope inclination also influences kinematic, kinetics and muscles coordination while pedalling (Duc et al. Citation2008).
Overall, traditional cycling has been widely studied in comparison to BMX. The BMX standing start has several specificities (e.g., the non-seated position, the downhill slope and rolling movement of the bike), and no information is available on the joint moment and power of the lower limb during the BMX start and in the general standing start action. Yet to date, all kinetic bicycle analysis has been focused on a sagittal plan analysis. Moreover, specific joint-power analysis is complex as there is no consensus on how negative and positive power should be summed in a single joint or regarding the distribution and repartition of power between each joint (van der Kruk et al. Citation2018). In 3D, the interpretation is even more complex as power is a scalar quantity and it cannot be decomposed into three axes. To help interpreting the 3D joint power in gait analysis, Dumas and Cheze (Citation2008), proposed a new approach that characterizes joint power as driving, stabilising or resisting whether joint moment vector is aligned with joint angular velocity vector or not.
The purpose of this study is to describe hip joint dynamics during the BMX start using 3D moments, 3D joint power and the 3D angle between the joint moment and joint angular velocity vectors. This information may highlight specific pedalling technique and dynamic strategies, which would be valuable coaching tools for training.
2. Methods
This abstract reports preliminary results of one BMX elite cyclists who performed six starts. The analysis focuses on the first two pedal strokes. The measurements were made on an Olympic supercross ramp (Saint-Quentin-en-Yvelines, France). 3D kinematic data were collected via a 19-camera optoelectronic system (Oqus Qualisys, Gothenburg, Sweden) and kinetic data were collected using 3D pedals sensors (Sensix, Poitiers, France). The inverse kinematics and inverse dynamics were run using OpenSimTm residual reduction algorithm. Outputs were 3D net joint moments and 3D angular velocities at hip level in the joint coordinate system. The 3D angle (αMω) between the moment and the angular velocity vectors was computed using Dumas and Cheze (Citation2008) method. αMω is defined positive and its value varies between 0 and 180°. A value in the interval [0–60°], or [120–180°] means that the joint is assumed principally propulsive, or resistive (the moment contributes to positive or negative joint power) respectively. In the range of 60 to 120°, the joint is mostly stabilising. Average and standard deviation of time varying 3D joint dynamics were obtained and then were sampled over the mean time of all six trials. Positive and negative joint power were separated (van der Kruk et al. Citation2018).
3. Results and discussion
Results are presented as means (±SD). Standard deviation, here, report pilot’s repeatability among the 6 trials. The two pedal strokes took 0.80 ± 0.01 s. The 3D angle value was 61.9 ± 6.4° (average over the two pedal strokes), in a mid-stabilisation/propulsion function. Positive joint power (7.11 ± 0.64 W/Kg) was distinctly greater than negative (-0.98 ± 0.18 W/Kg). 3D joint moment results are detailed in . Overall, extension/flexion only accounted for 60% of total joint moment while the remaining 40% was mainly abduction/adduction with little rotation moment.
Table 1. Hip joint moments (average and standard deviation of 6 trials for one pilot).
These average-across-time results provide general trends for this pilot but they hide valuable information on pedalling technique, that only a time-series analysis can reveal (). 3D moments reached their peaks approximately at the same time and that corresponded to the minimal value of the 3D angle. This entails that the net moments contribute to joint power and to the hip movement. In addition, the more the 3D angle value approached 0°, the more the joint is effective (propulsive) in its contribution to the hip movement.
Figure 1. Mean (±SD) 3D hip joint power (a), moments (b-d) and 3D angle (e) for two pedal strokes (lead and trail legs in red and blue respectively) of one pilot. Time in abscise is the mean time of all six trials and vertical green line indicates the time of gate drop (t = 0s). Each crank illustration in abscises indicates the crank angular position at the specific time.
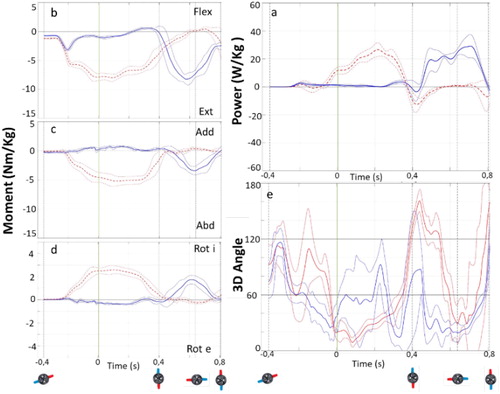
In average, the hip joint was mainly in an intermediate stabilising/propulsive configuration. This can be considered as non-optimal from a mechanical standpoint, but in an anatomical perspective, the joint, and especially the hip, needs a great amount of stabilisation to preserve its integrity. While the extension/flexion moment is the main contributor to the hip movement, crucial at generating joint power, the abduction/adduction and rotation moment are essential to stabilise the joint.
This methodology is new in the field of cycling and highlights the relevance of 3D analysis in standing cycling. These findings could be valuable coaching clues to individualize training. For this pilot, they highlight the need of muscle activity resulting in abduction/adduction and rotational moment to help stabilise the joint. Furthermore, identification of poor extension moment could lead to specific exercises aimed at improving hip strength.
The next step would be to investigate the dynamic coordination of the entire lower limb for all pilots, which may highlight some dynamic strategies between each joints. Moreover, it would be interesting to investigate the abduction moment value relative to the rolling movement of the bike and its contribution to joint power.
4. Conclusions
This case study gives insights into hip joint dynamics during a BMX start. A main result is the amount of abduction moment and the relatively low propulsive power compared to what is observed during gait. Overall, this methodology provides valuable information to improve individual technique and for strength conditioning.
Acknowledgement
The authors thank the INSEP for founding this work, the Fédération Française de Cyclisme for their help during the experimentations and the pilot for doing the experiments.
References
- Caldwell GE, Hagberg JM, McCole SD, Li L. 1999. Lower extremity joint moments during uphill cycling. J Appl Biomech. 15(2):166–181.
- Duc S, Bertucci W, Pernin JN, Grappe F. 2008. Muscular activity during uphill cycling: effect of slope, posture, hand grip position and constrained bicycle lateral sways. J Electromyogr Kinesiol. 18(1):116–127.
- Dumas R, Cheze L. 2008. Hip and knee joints are more stabilized than driven during the stance phase of gait: an analysis of the 3D angle between joint moment and joint angular velocity. Gait Posture. 28(2):243–245.
- Soden PD, Adeyefa BA. 1979. Forces applied to a bicycle during normal cycling. J Biomech. 12(7):527–541.
- van der Kruk E, van der Helm FCT, Veeger HEJ, Schwab AL. 2018. Power in sports: a literature review on the application, assumptions, and terminology of mechanical power in sport research. J Biomech. 79:1–14.