
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
In this study, we propose to evaluate structural control systems in terms of mechanical impedance and the peak of energy stored by the structure. Our main hypothesis is that the higher the mechanical impedance, the lower the peak of energy reached by the structure. This peak is calculated as the maximum of the difference between the energy injected by the seism and the energy dissipated as heat by viscous dampers. To support our claim, we performed numerical simulations on a three-story planar building comprising 12 revolute and four prismatic joints. Instead of using a linear mass-spring-damper model, we simulated a set of nonlinear equations given by the Newton-Euler (NE) algorithm, which has been widely used in robotics, but rarely in structural control. For energy dissipation, we compared a proportional derivative (PD) with a computed torque control (CTC). Simulation results for the CTC indicate that when all parameters of the structure are perfectly known, the deviations of the revolute and prismatic joints with respect to their nominal values are close to zero. This feature leads to almost null energy dissipation, but also reduces the energy transferred by the seism to the structure.
1. Introduction
Structures must be supervised to ensure their resistance to seismic threats and to avoid risks to human beings (Güemes et al. Citation2020). To avoid the collapse of a structure during earthquakes, the structure must dissipate seismic energy (Zhang et al. Citation2020). To increase safety, energy dissipation techniques have been used to modify structural dynamics (Oviedo and Duque Citation2006). The most used actuators to dissipate energy in buildings are viscous dampers. They are based on the use of active, passive, or semi-active elements, whose performance depends on both the excitation applied to the structure and the amount of energy to be dissipated. These techniques are based on a combination of stiffness and energy dissipation capacity in the inelastic range of the structure (Swartz Citation2011). The design, model and control of dampers for mitigating the energy of earthquakes have been studied for many authors. Yang et al. (Citation2020) model and control a shear-mode rotational damper for mitigating vibrations in buildings. Yang et al. (Yang et al. Citation2016) control a magnetorheological elastomer base isolation system using a second order sliding approach. Gu et al. (Citation2017) propose a smart base for vibration isolation that utilises a semi-active magnetorheological elastomer controlled by learning-based inverse model. The latter (Gu et al. Citation2019) presented an optimal neuro-fuzzy controller for the same system.
Structural control is an active area of research (Chiaia et al. Citation2020; Shih and Sung Citation2020; Reksowardojo and Senatore Citation2020; Di Girolamo et al. Citation2020). (Zhang and Ou Citation2015) propose an electromagnetic mass driver system (EMDS) for the control of structural vibrations. The EMDS consists of a rod made of tiny permanent magnets, which moves horizontally along the axis of an electric coil fixed to the structure to be controlled. The Lorenz force exerted on the coil counteracts earthquake-induced vibrations and varies with the voltage applied to the coil. This means that there is no mechanical contact between the rod and the structure, which leads to an unlimited mass stroke, lower operating noise, and limited wearing of moving parts. In addition, EMDS is faster and simpler than active mass dampers based on hydraulic systems or electric motors.
Despite the high success of active mass dampers for vibration control of civil structures; they have proven to be ineffective in controlling the swing vibrations of suspended structures such as bridges, pipelines, and wind turbines. This problem has motivated (Zhang, Li, and Ou Citation2009) to propose inertial dampers, which, unlike active mass dampers, produce rotary instead of linear motion. In Zhang and Wang (Citation2020), the authors present a rotary inertia damper, whose torque is calculated by a linear quadratic regulator. The numerical and experimental results, obtained on a vertical bar fixed to a shaking table, show the effectiveness of the technique to mitigate swing vibrations.
The dynamic modelling is a fundamental aspect for the design of controllers that dissipate the energy produced by an earthquake and avoid the collapse of the structure (Munteanu et al. Citation2020). Many works in the literature present mathematical models of structures (Pieczonka et al. Citation2013; Astroza and Alessandri Citation2019; Bouayed, Hamdi, and Rachik Citation2013). The design of structural controllers requires dynamic modelling (Cramer et al. Citation2016; Cao, Ouyang, and Cheng Citation2019; Renzi and Serino Citation2004; Ziyaeifar, Gidfar, and Nekooei Citation2012) and identification of structural parameters (Zhao et al. Citation2020; Yan, Sun, and Buyukozturk Citation2017; Soliman, Tait, and El Damatty Citation2017). An example of model-based control is presented in (Zhang Citation2014), where the authors compare four control strategies for suppressing wind-induced vibrations in a 76-story building. The first and second strategies are structural interleaved control and structural adjacent reaction wall (STA), respectively, using one actuator per floor. The other two strategies are the active mass damper and the semi-active mass damper (SAMD), which employ a single actuator, commonly located on top of the building. The main conclusion of (Zhang Citation2014) is that SAMD achieves similar performance that STA but at lower cost.
In this article, a three-story building is modelled as a closed kinematic chain with holonomic constraints. Unlike the simplified models presented in (Li et al. Citation2017), (Mohamed and Lakhdar Citation2016) and (Makisha Citation2019), the mathematical model proposed here represents the complete dynamics of the structure under study and allows comparison of different model-based control strategies (Bravo et al. Citation2019). The main contribution of this work is to study structural control systems in terms of the mechanical impedance and the energy stored by a structure. Here, we compare through simulation the performance of PD and CTC controllers for a mechanical three-story structure comprising 12 revolute and four prismatic joints (Fabien Citation2008).
2. Theoretical background
In this section, we explain the concept of mechanical impedance (Yang and Soh Citation2009) and its relation with the maximal kinetic energy stored by a structure when excited by an external force, such as wind or an earthquake.
The mechanical impedance quantifies the force exerted by a system in opposition to changes in its velocity. Mathematically, the mechanical impedance is defined as the quotient between a change in the input force and the corresponding change in velocity (Khalil and Dombre Citation2004). The stiffer a system is, the higher its mechanical impedance. In linear systems, the mechanical impedance is defined as the Laplace transform of the force divided by the Laplace transform of the velocity (Richardson et al. Citation2005).
The settling time of a structure influences its mechanical impedance. For example, the settling time of a mass-spring-damper system is when the spring constant is
, the damper constant is
, and the mass is
. This means that low values of
(fast structural response) implies high values of
and
. The maximum energy transferred to a structure in a given time interval depends on both the magnitude and the phase of its mechanical impedance. For constant phase, the lower the magnitude, the higher the maximum input energy, and for constant magnitude, the closer to zero the phase, the higher the maximum input energy. This last statement is explained by the maximum power transfer theorem (Nambiar Citation1969). shows the maximum input energy transferred to a linear mass-spring-damper system as a function of frequency. From this figure, it can be seen that at low frequency, the lower
, the lower the maximum input energy, and for high frequencies this relation is the opposite. This behaviour is explained by , which shows that at low frequencies the phase is almost constant and the magnitude decreases when
increases. At high frequencies, the magnitude is almost constant and the phase is nearest to zero as
increases.
Table 1. Impedance of a mass-spring-damper system for low and high frequencies, when and
.
was obtained by solving the following maximisation problem for different frequencies:
When is the input force and
the velocity of the mass, the product
is the mechanical input power and
is the power dissipated by the damper as heat.
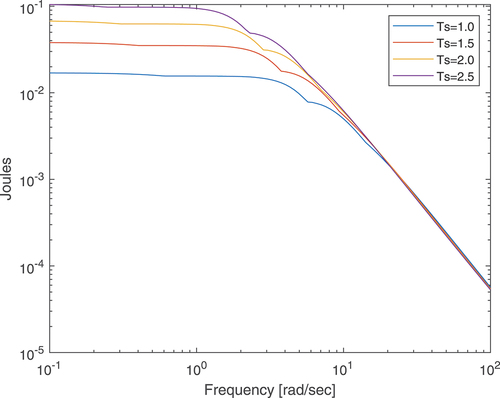
shows that the lower , the lower the maximum of the energy stored by the structure.
Figure 1. Maximal input energy transferred to a mass-spring-damper system when and
.
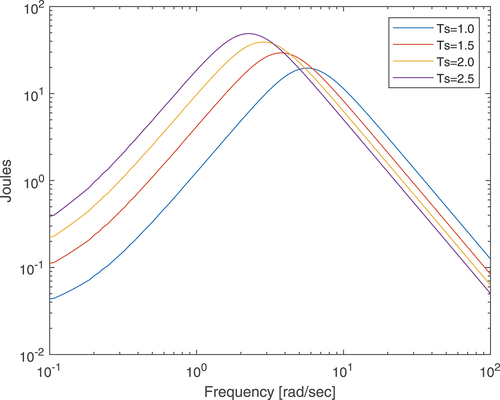
Figure 2. Maximal stored energy by a mass-spring-damper system.
3. Structure modelling
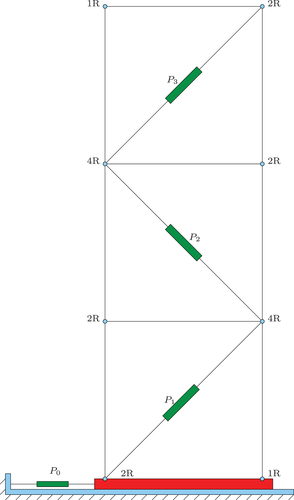
Although the planar building presented in has 12 revolute and 4 prismatic joints, it only has 4 degrees of freedom. The actuator represents the seismic forces acting on the base of the building, while
,
and
are responsible for energy dissipation. The length of the walls and floors of the structure are
and
respectively. The
,
and
actuators must keep the crossbar length at
, in order to guarantee right angles between walls and floors.
Figure 3. Structure mobility analysis.
3.1. Geometric model of the structure
The definition of the reference axes for begins with the construction of a tree structure derived from the original system. By tree, we mean a structure with no closed loop kinematic chains (Khalil and Dombre Citation2004). The tree structure is obtained by separating the points ,
,
,
of , which correspond to passive joints (Cheng and Tian Citation1992).
Figure 4. Tree equivalent structure obtained from 3.
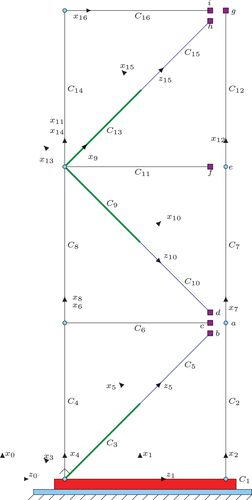
Once the reference axes for each body have been established, the table of kinematic parameters is generated. The table comprises six geometric parameters (Khalil and Dombre Citation2004) that relate all the linear and angular dimensions of the building:
The kinematic parameters of define the matrix (1), which transforms Cartesian positions from the reference frame to the reference frame
. This last frame indicates the body that precedes the body
. For example, and show that the body
is the common predecessor of the bodies
,
,
, and
. In this manner
.
Table 2. Geometric parameters ().
In EquationEquation (1)(1)
(1) , the symbols
and
denote the cosine and sine functions, respectively. For example,
represents
.
3.2. Holonomic constraints
To transform the tree structure of in the closed kinematic chain of , the Cartesian positions of points ,
,
y
must coincide during simulation. For the second level, the equality constraint must hold for points
and
, and for the third level, between
,
and
. In this manner, the aforementioned points must satisfy
Where ,
,
are Cartesian positions of points
to
with respect to reference system
. If (2) is derived with respect to time, then the velocity constraint is obtained
relates
with the velocity of the point
of the structure (). The velocity
is measured with respect to the immobile frame
. Thereby,
. Matrix
,
,
,
,
,
,
and
are used to calculate the velocities of the points
,
,
,
,
,
,
e
with respect to the frame
, respectively. Constraint EquationEquation (3)
(3)
(3) should be derived with respect to time to involve the acceleration vector
.
Thus, accelerations must satisfy the following constraint:
3.3. Dynamic model of the structure
Closed kinematic chains are modelled using the following principle:
Tree mechanism + Holonomic constraints = Closed kinematic chain
The above equality implies that if a vector of forces is added to the direct dynamic model of the tree structure and this vector ensures compliance of the holonomic constraints, then the resulting structure will be a closed kinematic chain (Fabien Citation2008):
Being ,
and
, vectors of positions, velocities and generalised accelerations, respectively.
is the inertia matrix
the vector of centrifugal, gravitational, and Coriolis forces.
contains the forces that ensure compliance of holonomic constraints,
is the vector with the forces exerted by the actuators
,
,
and
. Matrix
, contains ones and zeros, and satisfies the following property:
y
are column vectors with three and four zeros, respectively. The product
indicates that only coordinates
are actuated. To find
and
at each time, the following equation must be solved:
Vector ensures that acceleration constraints are met (EquationEquation (5)
(5)
(5) ). However, to satisfy the velocity and position constraints, it is necessary that the initial conditions
and
satisfy EquationEquations (2)
(2)
(2) and (Equation3
(3)
(3) ).
4. Structural control
Civil structures employ automatic control strategies to compensate the forces produced by external events and minimise structural damage. In this work, PD and CTC control strategies are used. For each of them, the responses obtained when the structure under study was subjected to external forces are evaluated.
4.1. Structural control PD
Forces compensation in these structures is achieved by parallel spring-damper systems (PSD). Springs store energy when they are subjected to the action of external forces. The force exerted by a spring is proportional to its deformation (, where
is the spring length when no deformation exists). Dampers do not store energy but dissipate it as heat; they are used to reduce oscillations in mechanical systems. Damper transfers a viscous fluid from one chamber to another when it is subjected to external forces. The damping force is proportional to the internal liquid circulation speed (Dixon Citation2007) (
). When a PSD system is subjected to a force
and its length is
, then its motion is described by Newton’s second law is:
Now, we will show that a PSD is equivalent to the PD control law described by (Åström and Hägglund Citation2006):
Where is the force exerted by PD system,
is the proportional constant,
is the derivative constant, and
is the difference between the desired length
, which is constant, and the measured length
of the diagonal bar of each level of the structure.
EquationEquation (11)(11)
(11) is analogue to (9), where
is equivalent to
,
to
,
to
, and
to
. In this manner, any PSD implements a PD control law.
When the base of the building is excited by a seism, the movement spreads to the upper floors and produces oscillations that must be controlled to avoid total or partial collapse. However, flexibility can be controlled by varying the spring and damping constants of the actuators. To select the values of and
, we will start from the general differential equation of an underdamped system:
If and
then, EquationEquation (12)
(12)
(12) is said to converge to zero at a time
. EquationEquation (12)
(12)
(12) is a generalisation of the following mass-spring-damper model:
By comparing EquationEquation (12)(12)
(12) and EquationEquation (11)
(11)
(11) and assuming known the mass
, we have:
EquationEquation (14)(14)
(14) gives the values of
and
required to stabilise a mass
, in a time
, with a damping coefficient
. In this work, the value of
is the total building mass, and the resulting
and
were used to tune the PDs of the actuators
,
and
joints.
4.2. Structural control CTC
If the degrees of freedom of an articulated structure equals the number of actuated variables, then a CTC linearises and decouples its dynamics (Khalil and Dombre Citation2004). This means that a fully actuated mechanical system of degrees of freedom can be transformed into
non-interacting linear systems. In the present study, however, we have
degrees of freedom and
actuators because the actuator
was included in the model only to simulate the effect of seismic forces. Therefore, it cannot be included as an actuator for the control system. Under this consideration, a partial linearisation and decoupling of the structure will be carried out. To achieve this goal, we decompose
in two vectors,
with the coordinates of the actuators (
) and
with the remaining coordinates. Subsequently, the EquationEquations (5)
(5)
(5) and (Equation6
(6)
(6) ) are rewritten, separating the terms that depend on
and
:
and
comprise columns
,
and
of matrix
and
, respectively.
and
contain the remaining columns of
and
.
is the first column of
and
correspond to columns
,
and
of
. Scalar
is the force injected through
to simulate an earthquake.
is formed by the forces exerted by the actuators
,
, and
.
If variables ,
, and
are assumed as the unknowns of the simulation model, and
and
are supposed to be known, then EquationEquation (15)
(15)
(15) can be rewritten as a system linear of
equations and
unknowns, given by EquationEquation (16)
(16)
(16)
If the mathematical model of the structure is perfectly known, and additionally, variables and
can be measured exactly, then the values
, obtained from EquationEquation (16)
(16)
(16) will ensure that
,
, and
are given by
. This vector is selected as shown below, in order to obtain the three linear dynamical systems described by EquationEquation (17)
(17)
(17)
In EquationEquation (17)(17)
(17) ,
is constant, then
and
. EquationEquation (17)
(17)
(17) guarantees that the dynamics of the joints
,
and
will be decoupled. This means that the behaviour of one joint does not affect the other two. This decoupling does not depend on the values selected for
y
, which will be relevant only when
,
and
diverge from
.
In , the structural control actuators ,
and
modify the mechanical impedance seen by the seismic source
. It implies that
,
and
also modify the amount of energy stored by the structure. The change in the total energy of the structure is the difference between the energy injected by the seismic forces and the energy dissipated as heat by the actuators
,
and
. Therefore, the energy balance at time
is given by:
To avoid structural damage, the purpose of the control system should be to keep as low as possible. This can be achieved by dissipating most of the energy injected by the seism (
)
5. Results
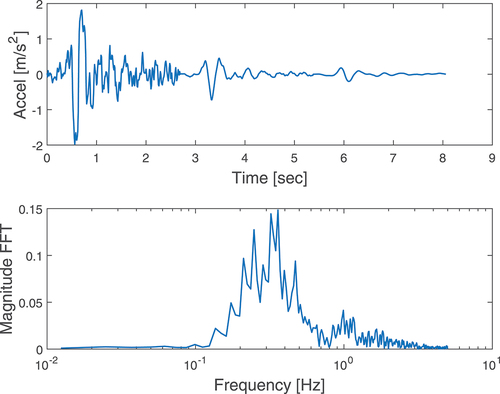
In this work, we used the accelerations of a seism registered in 1977 by the National Institute for Earth Physics (Bucharest, Romania) (Ambraseys et al. Citation2002). These accelerations were multiplied by the total mass of the building to obtain
, which is the variable required for our model. presents both the acceleration as a function of time and the single-sided amplitude spectrum of the acceleration.
Figure 5. Acceleration as a function of time and the single-sided amplitude spectrum of the acceleration.
5.1. Control performance
The actuators ,
and
counteract the movements generated by
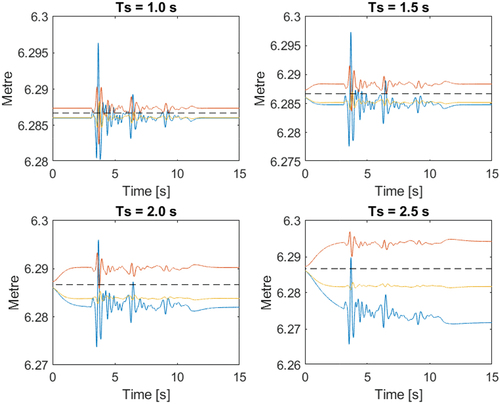
, which simulates the seismic forces presented in . shows the length of the bars for the PD control. As the value of
increases, the structure becomes more flexible, and therefore, the bars show higher deviations from their desired values. For low values of
, the length of the bars is closer to the desired one.
Figure 6. PD control. Elongations of the diagonal bars for different values of . The dotted line corresponds to the desired length. The graphs in blue, red and yellow correspond to the joints
,
, and
, respectively. In ALL four cases
was set to
.
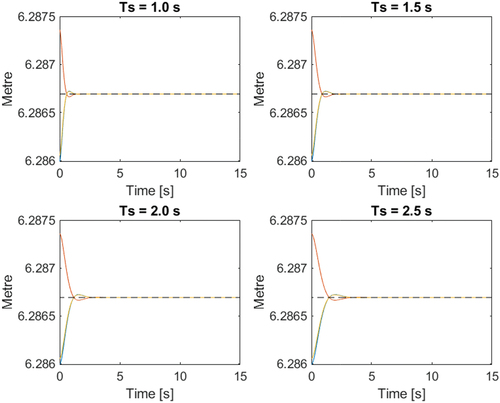
presents the length of the diagonal bars for the CTC control and considering the same seismic forces used for the PD. EquationEquation (16)(16)
(16) guarantees the linearisation and decoupling between joints
,
,
, and additionally ensures that these variables are not affected by the disturbance force applied through
. shows that under ideal conditions (perfectly known mathematical model of the structure and exact measurement of variables), the response of system is independent of
.
Figure 7. CTC control. Elongations of the diagonal bars for different values of . The dotted line corresponds to the desired length. The graphs in blue, red, and yellow correspond to the joints
,
, and
, respectively.In all four cases
was set to
.
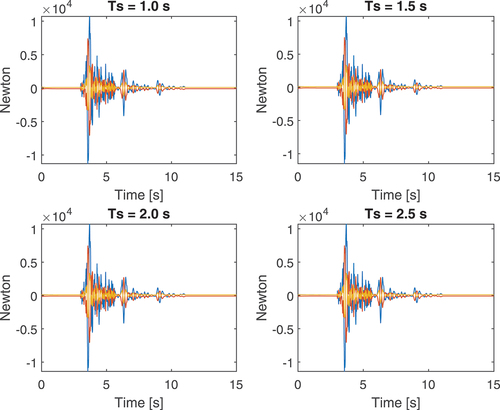
5.2. Control Efforts
present the control efforts exerted by the actuators ,
, and
. These figures show that the price for the high performance of the CTC is a peak in the control effort near to the double of the peak for the PD.
Figure 8. PD control. Forces exerted by the actuators ,
, and
.
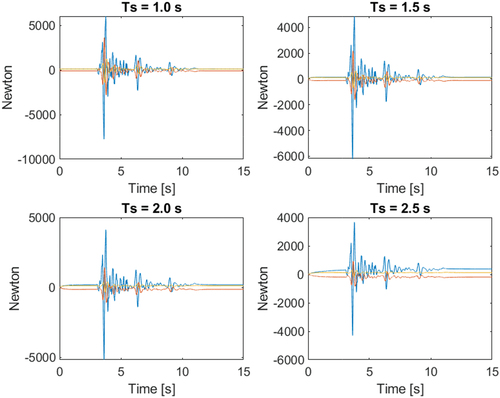
Figure 9. CTC control. Forces exerted by the actuators ,
, and
.
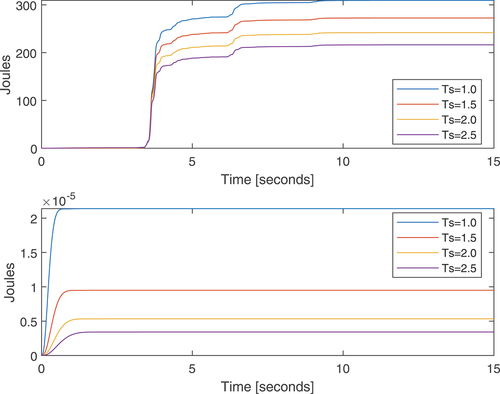
5.3. Energy balances
shows that for the PD, the energy transferred by the seism to the structure increases when the settling time decreases. For the CTC, this energy does not change significantly with
. From , it can be seen that for all values of
, the PD leads to more energy absorption than the CTC.
Figure 10. Energy transferred by the seism to the structure versus time considering different values for .
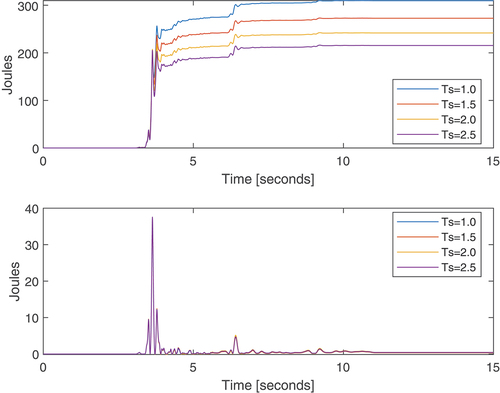
presents the energy dissipated for each controller. The PD dissipates much more energy than the CTC because the PD allows the seism to inject more energy into the structure than the CTC. For the PD, the dissipated energy almost equals the input energy for seconds. It can be verified by seeing . For the CTC, almost no energy is dissipated. This is explained by that shows that the length of diagonal bars remains almost constant and, as a consequence, dampers cannot transform seismic energy into heat.
Figure 11. Dissipated energy versus time for different values of .
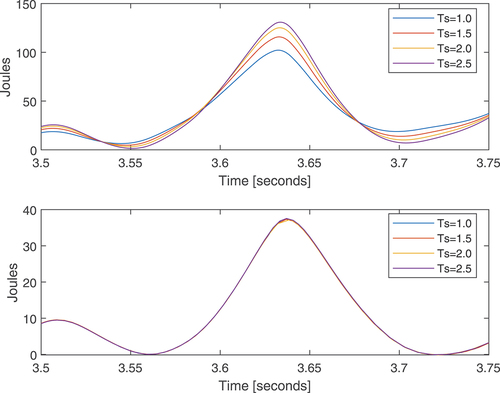
shows the energy stored by the structure for each controller. The main difference between the PD and the CTC occurs at seconds, that is when the seism occurs. The peak of energy for the PD is 120 joules, whereas the peak for the PD is 40 joules. is a zoom of around the time interval
seconds that shows that the stiffer the system, the lower the maximum of energy stored by the structure. According to , the inverse relation between stored energy and
indicates that the frequency range where the seismic signal reaches its maximum power is below the resonance frequency of the structure.
Figure 12. Stored energy versus time for different values of .
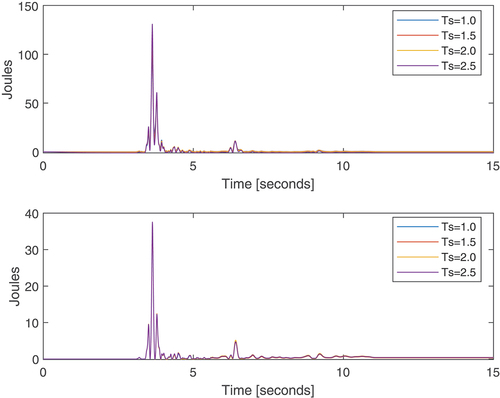
Figure 13. Stored energy versus time around the peak presented in Figure 12.
6. Conclusion and future work
In this work, the NE algorithm is used to model a three-story building with 12 revolutes and four prismatic joints and holonomic constraints. The resulting model comprises four nonlinear second-order differential equations. This modelling approach is common in robotics but has rarely been used in structural control, where most models are linear multibody mass-spring-damper systems. Our model is not only used for simulation but also to design the CTC controller. Since the simulation and control models were the same, the CTC led to a perfect linearisation and decoupling of the structure. On the other hand, in the control of a real structure, the dynamics used to synthesise the CTC will be different of the dynamics of the actual structure, and as a consequence, linearisation and decoupling will be only partially achieved. Despite the high performance of CTC with respect to the PD, the CTC is not a realistic option for structural control since it requires: (i) a detailed model of the structure, (ii) sensors for joint positions and velocities, and (iii) to measure the forces affecting the structure during an earthquake. Besides, to tune the PD only the total mass of the building is required. Future work consists of evaluating the robustness of the CTC against incertitude in the nonlinear model. This can be done through Monte-Carlo simulations, where masses, inertias, and lengths will be represented as random variables, or by implementing the CTC in real-scale structure with actuators and sensors to prove the simulation results.
The structural control system defines the settling time of a structure and, therefore, its mechanical impedance, which in turn modifies the maximum energy that the structure receives from an external source of movement. Depending on the frequency of the seismic signal, the input energy peak may increase or decrease with the settling time. On the contrary, the maximum stored energy always decreases as the settling time decreases. This relationship was verified for a linear mass-spring-damper system and for the nonlinear structure described in Section 3, but a general proof remains for future work.
Acknowledgments
The authors would like to recognise and express their sincere gratitude to Universidad del Cauca [ISNI: 0000 0001 2158 6862] (Colombia), for the financial support granted during this project.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Carlos F. Rengifo
Carlos F. Rengifo received the degree in electrical engineering and the master’s degree in automatic control from the Universidad del Valle, Colombia, and the Ph.D. degree in robotics from the École Centrale de Nantes, France, in 2010. He is currently a Full Professor at Universidad del Cauca, Colombia. His research interests includes modeling and control of robots, and biomechanical systems.
Diego A. Bravo
Diego A. Bravo received the B.S. degree in physical engineering from the Universidad del Cauca, Colombia, in 2003, the M.S. degree in automatic engineering from the Universidad del Valle, Colombia, in 2012, and the Ph.D. degree from the Universidad del Cauca, in 2016. He is currently a Full Professor with the Physics Department at Universidad del Cauca. His research includes modeling and control of dynamical systems, and system identification.
References
- Ambraseys, N., P. Smit, R. Sigbjornsson, P. Suhadolc, and B. Margaris (2002), Internet-site for European Strong-motion Data, Technical report, European Commission, Research-Directorate General, Environment and Climate Programme.
- Åström, K., and T. Hägglund. 2006. Advanced PID Control. ISA-The Instrumentation, Systems, and Automation Society.
- Astroza, R., and A. Alessandri. 2019. “Effects of Model Uncertainty in Nonlinear Structural Finite Element Model Updating by Numerical Simulation of Building Structures.” Structural Control and Health Monitoring 26 (3): e2297. e2297 STC-17-0316.R2. doi:10.1002/stc.2297.
- Bouayed, K., M. Hamdi, and M. Rachik. 2013. “Finite Element Modelling of Sandwich Shell Structures Application to a Windscreen Panel.” Structural Control and Health Monitoring 20 (4): 593–608. doi:10.1002/stc.1480.
- Bravo, M., D. A., R., C. F. Rengifo, O. Díaz, and J. F. 2019. “Comparative Analysis between Computed Torque Control, Lqr Control and Pid Control for a Robotic Bicycle.” in 2019 IEEE 4th Colombian Conference on Automatic Control (CCAC), Medellín, (Colombia)., pp. 1–6. doi: 10.1109/CCAC.2019.8920870.
- Cao, S., H. Ouyang, and L. Cheng. 2019. “Baseline-free Multidamage Identification in Plate-like Structures by Using Multiscale Approach and Low-rank Modelling.” Structural Control and Health Monitoring 26 (2): e2293. e2293 STC-18-0093.R1. doi:10.1002/stc.2293.
- Cheng, F., and P. Tian. 1992. “Generalized Optimal Active Control Algorithm for Nonlinear Seismic Structures.” in Earthquake Engineering, Tenth World Conference, Madrid, Spain.
- Chiaia, B., G. Marasco, G. Ventura, and C. Zannini Quirini. 2020. “Customised Active Monitoring System for Structural Control and Maintenance Optimisation.” Journal of Civil Structural Health Monitoring 10: 267–282. doi:10.1007/s13349-020-00382-8.
- Cramer, N., S. S.-M. Swei, K. C. Cheung, and M. Teodorescu. 2016. “Extended Discrete-time Transfer Matrix Approach to Modeling and Decentralized Control of Lattice-based Structures.” Structural Control and Health Monitoring 23 (10): 1256–1272. doi:10.1002/stc.1837.
- Di Girolamo, G. D., F. Smarra, V. Gattulli, F. Potenza, F. Graziosi, and A. D’Innocenzo. 2020. “Data Driven Optimal Predictive Control of Seismic Induced Vibrations in Frame Structures.” Structural Control and Health Monitoring 27 (4). doi:10.1002/stc.2514.
- Dixon, J. 2007. The Shock Absorber Handbook. Wiley-Professional Engineering Publishing, 2 edn. United States: John Wiley & Sons.
- Fabien, B. C. 2008. Analytical System Dynamics: Modeling and Simulation. New York, USA: Springer.
- Gu, X., Y. Yu, J. Li, and Y. Li. 2017. “Semi-active Control of Magnetorheological Elastomer Base Isolation System Utilising Learning-based Inverse Model.” Journal of Sound and Vibration 406: 346–362. doi:10.1016/j.jsv.2017.06.023.
- Gu, X., Y. Yu, Y. Li, J. Li, M. Askari, and B. Samali. 2019. “Experimental Study of Semi-active Magnetorheological Elastomer Base Isolation System Using Optimal Neuro Fuzzy Logic Control.” Mechanical Systems and Signal Processing 119: 380–398. doi:10.1016/j.ymssp.2018.10.001.
- Güemes, A., A. Fernandez-Lopez, A. R. Pozo, and J. Sierra-Pérez. 2020. “Structural Health Monitoring for Advanced Composite Structures: A Review.” Journal of Composites Science 4 (1): 13. doi:10.3390/jcs4010013.
- Khalil, W., and E. Dombre. 2004. Modeling, Identification and Control of Robots. 2 edn ed. Butterworth - Heinemann, Paris, France: Kogan Page Science paper edition.
- Li, G., Y. Chen, C. Wen, C. Wang, J. Li, and J. Chen. 2017. “Quality Evaluation of Point Cloud Model for Interior Structure of a Common Building, in 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, Texas, USA. pp. 6040–6043. doi: 10.1109/IGARSS.2017.8128387.
- Makisha, E. 2019. “Classification of Types of Verification for Building Information Models.” in 2019 International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon), Vladivostok, Russian Federation, pp. 1–4. doi: 10.1109/FarEastCon.2019.8934092.
- Mohamed, A., and G. Lakhdar. 2016. “GMV Control Algorithm for Civil Engineering Structures under Bidirectional Earthquakes Using Decentralized Model.” in 2016 16th International Conference on Control, Automation and Systems (ICCAS), HICO, Gyeongju, Korea, pp. 145–150. doi: 10.1109/ICCAS.2016.7832312.
- Munteanu, R. I., G. B. Nica, V. Calofir, S. S. Iliescu, and O. T. Sirbu. 2020. “Building Seismic Behavior Improvement Using an Optimal Control Algorithm.” in 2020 IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR), Cluj-Napoca, Romania, pp. 1–6. doi: 10.1109/AQTR49680.2020.9130005.
- Nambiar, K. 1969. “A Generalization of the Maximum Power Transfer Theorem.” Proceedings of the IEEE 57 (7): 1339–1340. doi:10.1109/PROC.1969.7266.
- Oviedo, J. A., and M. d. P. Duque. 2006. “Sistemas de control de respuesta sísmica en edificaciones.” Revista EIA 6: 105–120.
- Pieczonka, L., F. Aymerich, G. Brozek, M. Szwedo, W. J. Staszewski, and T. Uhl. 2013. “Modelling and Numerical Simulations of Vibrothermography for Impact Damage Detection in Composites Structures.” Structural Control and Health Monitoring 20 (4): 626–638. doi:10.1002/stc.1483.
- Reksowardojo, A. P., and G. Senatore. 2020. “A Proof of Equivalence of Two Force Methods for Active Structural Control.” Mechanics Research Communications 103: 103465. doi:10.1016/j.mechrescom.2019.103465.
- Renzi, E., and G. Serino. 2004. “Testing and Modelling a Semi-actively Controlled Steel Frame Structure Equipped with Mr Dampers.” Structural Control and Health Monitoring 11 (3): 189–221. doi:10.1002/stc.36.
- Richardson, R., M. Brown, B. Bhakta, and M. Levesley. 2005. “Impedance Control for a Pneumatic Robot-based around Pole-placement, Joint Space Controllers.” Control Engineering Practice 13 (3): 291–303. Aerospace IFAC 2002. doi:10.1016/j.conengprac.2004.03.011.
- Shih, M., and W. Sung. 2020. “Structural Control Effect and Performance of Structure under Control of Impulse Semi-active Mass Control Mechanism.” Iranian Journal of Science and Technology, Transactions of Civil Engineering 45: 1211–1226.
- Soliman, I. M., M. J. Tait, and A. A. El Damatty. 2017. “Modeling and Analysis of a Structure Semi-active Tuned Liquid Damper System.” Structural Control and Health Monitoring 24 (2): e1865. e1865 STC-14-0091.R3. doi:10.1002/stc.1865.
- Swartz, A. R. 2011. “Reduced-order Modal-domain Structural Control for Seismic Vibration Control over Wireless Sensor Networks.” in American Control Conference, San Francisco, California.
- Yan, G., H. Sun, and O. Buyukozturk. 2017. “Impact Load Identification for Composite Structures Using Bayesian Regularization and Unscented Kalman Filter.” Structural Control and Health Monitoring 24 (5): e1910. e1910 STC-16-0012.R1. doi:10.1002/stc.1910.
- Yang, Y., R. Sayed, G. Xiaoyu, L. Yancheng, L. Jianchun, and H. Quang. 2016. “Magnetorheological Elastomer Base Isolator for Earthquake Response Mitigation on Building Structures: Modeling and Second-order Sliding Mode Control.” Earthquakes and Structures 11 (6). doi:10.12989/EAS.2016.11.6.943.
- Yang, Y., R. Sayed, L. Yancheng, L. Jianchun, M. Y. Amir, G. Xiaoyu, L. Shaoqi, and L. Huan. 2020. “Dynamic Modelling and Control of Shear-mode Rotational MR Damper for Mitigating Hazard Vibration of Building Structures.” Smart Materials and Structures 29 (11): 114006. doi:10.1088/1361-665x/abb573.
- Yang, Y. W., and C. K. Soh. 2009. “2 - Piezoelectric Impedance Transducers for Structural Health Monitoring of Civil Infrastructure Systems.” In Structural Health Monitoring of Civil Infrastructure Systems, edited by V. M. Karbhari and F. Ansari, 43–71. Sawston, Cambridge: Woodhead Publishing Series in Civil and Structural Engineering, Woodhead Publishing. doi:10.1533/9781845696825.1.43.
- Zhang, C. 2014. “Control Force Characteristics of Different Control Strategies for the Wind-excited 76-story Benchmark Building Structure.” Advances in Structural Engineering 17 (4): 543–559. doi:10.1260/1369-4332.17.4.543.
- Zhang, X., W. Feng, H. Du, L. Li, S. Wang, L. Yi, and Y. Wang. 2020. “The 2018 Mw 7.5 Papua New Guinea Earthquake: A Dissipative and Cascading Rupture Process.” Geophysical Research L Etters 47 (17). doi:10.1029/2020GL089271.
- Zhang, C., L. Li, and J. Ou. 2009. “Swinging Motion Control of Suspended Structures: Principles and Applications.” Structural Control and Health Monitoring 17: 549–562. doi:10.1002/stc.331.
- Zhang, C., and J. Ou. 2015. “Modeling and Dynamical Performance of the Electromagnetic Mass Driver System for Structural Vibration Control.” Engineering Structures 82: 93–103. doi:10.1016/j.engstruct.2014.10.029.
- Zhang, C., and H. Wang. 2020. “Swing Vibration Control of Suspended Structures Using the Active Rotary Inertia Driver System: Theoretical Modeling and Experimental Verification.” Structural Control and Health Monitoring 27 (6). doi:10.1002/stc.2543.
- Zhao, H., Y. Ding, A. Li, W. Sheng, and F. Geng. 2020. “Digital Modeling on the Non- Linear Mapping between Multi-source Monitoring Data of In-service Bridges.” Structural Control and Health Monitoring 27 (11): e2618. doi:10.1002/stc.2618.
- Ziyaeifar, M., S. Gidfar, and M. Nekooei. 2012. “A Model for Mass Isolation Study in Seismic Design of Structures.” Structural Control and Health Monitoring 19 (6): 627–645. doi:10.1002/stc.459.