Abstract
In this paper, a new structural design method based on MATLAB is developed for the configuration design and optimization of real-life planar manipulators in the high-speed press line. To explore planar manipulators with better performance, the developed method provides a suite of analysis procedures including demonstrating structural synthesis in graph theory, building conversion relations between different models, and generating new configurations of the planar manipulator. In the structural synthesis, the whole family of non-isomorphism planar 8-link kinematic chains with up to 3 prismatic pairs is generated, which lays a solid foundation for the generation of new configurations of planar manipulators. Under the expected requirements and constraints, the original planar manipulator is compared with new planar manipulators in which the developed method. The result shows that the developed method of task-driven structural synthesis is effective in generating configurations of planar manipulators and enriches related research of structural design and optimization in the field.
Disclosure statement
No potential conflict of interest was reported by the authors.
Figure 9. Structure diagrams under the different base bodies.
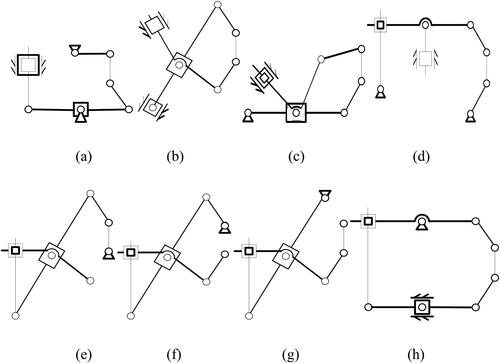
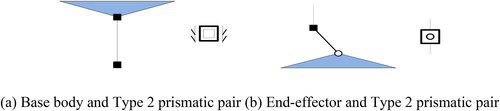
Figure 10. Two types of combinations between the base body and Type 2 prismatic pair. (a) Base body and Type 2 prismatic pair (b) End-effector and Type 2 prismatic pair.