
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
As this paper is concerned with a class of multistep numerical difference techniques to solve one-dimensional parabolic inverse problems with source control parameter , we apply the linear multistep method combining with Lagrange interpolation to develop three different numerical difference schemes. The problem of numerical differentiation with noisy scattered data is mildly ill-posed, the smoothing spline model based on Tikhonov regularization method is developed to compute numerical derivative contaminated by noise error. Simultaneously, the truncation error estimations and the convergence conclusions are proposed for the above difference methods respectively. The results of numerical tests with different noise levels are given to show that the presented algorithms are accurate and effective.
1. Introduction
Inverse heat conduction problems (IHCPs) arise in many fields of physics such as control modelling with heat propagation, mechanics, heat flux, the remote sensing technology, signal processing and industrial controlling. Many researchers have been attracted to study this field because their theories possess distinct novelty and are applicable to a broad range of applications.
It is known that heat conduction process is very smooth, but the studies of IHCPs are more difficult for its irreversible. The IHCP is ill-posed in some sense that any small errors for measured values on some specified points can result in a large error to the solution [Citation1], which implies that the resultant discretized matrix is ill-conditioned, i.e. that the solution is potentially sensitive to perturbations. So the key is to find a stable algorithm to overcome the ill-posedness of problems, using a reasonable regularization method generally [Citation2,Citation3]. Furthermore, Tikhonov regularization method plays an important role in efficiently solving the ill-posed problems [Citation4].
Many numerical algorithms for solving one-dimensional IHCP have been proposed during the last decade, including the finite difference method (FDM) [Citation5–10], the radial basis function (RBF) method [Citation11–15], the method of fundamental solutions (MFS) [Citation1,Citation16,Citation17], the collocation method (CM) [Citation18] and the boundary element method (BEM) used in the determination of a spacewise-dependent heat source [Citation19], etc. Meanwhile, some numerical technologies are applied in multidimensional parabolic equations [Citation20–23], Dehghan et al. [Citation24–31] proposed the meshless method of RBFs to solve a series of nonlinear high dimensional partial differential equations, and applied other schemes to solve inverse parabolic problems to obtain effective results. We consider that the main advantage of the forward FDM, whose form is simple and easy to compute. Moreover, when we handle the one-dimensional inverse parabolic equations, it is different between the spatial domain and temporal domain in the physical view [Citation14]. For an aspect of constructing tools with high accuracy, we apply the linear multistep technology to develop more accurate difference schemes. In practical problems, the overspecification node cannot just be chosen a mesh point
, so we use cubic or quartic Lagrange polynomial interpolation method to approximate function
.
This paper is organized as follows. In Section 2, we present a class of IHCP with a source control parameter and introduce the main idea of transforming it into a direct problem to solve. In Section 3, first we describe the process of constructing numerical finite difference schemes by using linear multistep technologies. Second, we give three different FDMs. Furthermore, we deduce the order results of truncation error and the convergence estimates, including the case of
with noise. The numerical results for the test used are given in Section 4. Finally we summarize this paper in Section 5.
2. Problem statement
We now consider a class of IHCP with the source control parameter , which is stated as follows:
(1)
(1) with the initial condition
(2)
(2) the boundary conditions
(3)
(3)
(4)
(4) and the overspecification at a node
in the spatial domain
(5)
(5) where
and
are the given functions, but the functions
and
are unknown. The function
denotes temperature distribution which is the exact solution to the IHCP, and
is a source control parameter, where (Equation5
(5)
(5) ) produces a desired temperature at each time t and a given point
in the spatial domain. The system of equations (Equation1
(1)
(1) )–(Equation5
(5)
(5) ) represents a heat transfer process, and the existence, uniqueness of the solution and some applications of this problem are introduced in [Citation32–35]. The aim of solving the problem is to identify the function
and the parameter
. Since the formula (Equation1
(1)
(1) ) includes two unknown functions
and
, so we adopt the following treatment by J.R. Cannon [Citation33,Citation36], which can transform Equations (Equation1
(1)
(1) )–(Equation4
(4)
(4) ) into another direct parabolic problem.
Let
(6)
(6) and
(7)
(7) which can eliminate the nonlinear term
from Equation (Equation1
(1)
(1) ) and to obtain a nonlocal parabolic equation, then the problems (Equation1
(1)
(1) )–(Equation4
(4)
(4) ) can be transformed into the following equations:
(8)
(8) with the initial condition
(9)
(9) and the boundary conditions
(10)
(10)
(11)
(11) By (Equation5
(5)
(5) ) and (Equation7
(7)
(7) ),
can be obtained by
(12)
(12) and
can be presented by
(13)
(13) then we can obtain the control parameter
as
(14)
(14) where the superscript
represents the first derivative of some function in this paper. In addition, the general algorithms of this paper consisting of two subproblems are as follows:
. First, we compute the numerical solutions
(or
) of
by multistep difference technologies and use Lagrange polynomial interpolation to compute
(or
), further to obtain
(or
) by (Equation12
(12)
(12) ), then get
(or
) by (Equation13
(13)
(13) ).
. For a set of given scattered data
(or
) above, we use the numerical differential scheme combining with Tikhonov regularization method to obtain the smooth regularized solution
(or
), further to compute
(or
) by (Equation14
(14)
(14) ).
Remark 2.1
If the data in (Equation1(1)
(1) )–(Equation5
(5)
(5) ) are smooth and compatible, then the problem (Equation1
(1)
(1) )–(Equation5
(5)
(5) ) is equivalent to the problem (Equation8
(8)
(8) )–(Equation12
(12)
(12) ), and the solution of this parabolic problem exists uniquely, which is smooth from the standard regularization theory of parabolic equations. In addition, if
is obtained numerically, the functions
and
can be computed by the forms (Equation13
(13)
(13) ) and (Equation14
(14)
(14) ) respectively, it means that the problem (Equation1
(1)
(1) )–(Equation5
(5)
(5) ) is mildly ill-posed in [Citation8,Citation33,Citation37,Citation38].
Remark 2.2
When the measured data is exact in Section 3.1.3, the problem
above is well posed by Theorem 3.3. However, the problem
above is ill-posed by Theorem 3.4, in this case, the regularization parameter
depends on the errors from
with respect to the step sizes τ and h, i.e. if
, the convergence can be obtained as
.
Remark 2.3
In Section 3.1.4, when has noise of level δ, i.e.
for all
, then the problems
and
above are both ill-posed. As shown in Theorem 3.6, the step sizes τ and h should be selected according to δ in order to obtain the order of convergence
for
in
. Furthermore, as shown in Theorem 3.8, the step sizes τ, h, and the regularization parameter
are related to δ in
, i.e. if
and
, the order of convergence is
,
.
3. Multistep numerical difference schemes
We divide the domain into an
uniform mesh with the spatial step-size
in the x direction and the temporal step-size
, where M and N are positive integers. Let
. We assume
is an approximation value of
, the values
and
are the similar approximations of
and
respectively.
On the left side of Equation (Equation8(8)
(8) ),
can be substituted by
(15)
(15) at the grid point
, where
. The formula
on the right side of Equation (Equation8
(8)
(8) ) can be approximated by the linear multistep methods [Citation39], the key is to construct a k-step linear discretization equation as follows:
(16)
(16) where
,
and
are real constants. In order to determine the parameters
and
, we first define the following operator:
(17)
(17) and expand
and
at point x by Taylor polynomials, then we can find
(18)
(18) where
are constants and satisfy
(19)
(19) by choosing suitable values k,
and
such that
, and
, so we get the following truncation error:
(20)
(20) By substituting
and
in Equation (Equation17
(17)
(17) ) for
and
, and we can obtain the k-step discrete equation (Equation16
(16)
(16) ) with its local truncated error
.
3.1. Three-point numerical difference scheme
3.1.1. Algorithm 1
Let , in Equations (Equation15
(15)
(15) )–(Equation16
(16)
(16) ), and denote the grid ratio
. We choose an appropriate coefficient set
, correspondingly obtain the derived set
and the nodes-subscript set
in Table , so we can get the general difference equation formula:
(21)
(21)
Table 1. The different configuration parameters in formula (Equation21 (21) (21) ).
(21) (21) ).
Note that and
by (Equation6
(6)
(6) ) and (Equation9
(9)
(9) ), respectively. In practice, the overspecification node
cannot just be chosen as a mesh point
, so we use cubic-Lagrange polynomial interpolation method to compute
, whose structure is simple, and to achieve the required accuracy of proposed methods. According to the location of
, there are three cases to be proposed as follows:
If
, then
yields
(22)
(22)
If
,
, then
yields
(23)
(23)
If
, then
yields
(24)
(24) the above
denotes a cubic-Lagrange basis function, and
(25)
(25) where
,
indicates an interpolation node in the domain
. Then according to the formula (Equation12
(12)
(12) ), the approximation of
can be obtained by
(26)
(26) the boundary values
and
will be updated by Equations (Equation10
(10)
(10) ) and (Equation11
(11)
(11) ) as follows:
(28)
(28)
(29)
(29) where
. According to the formula (Equation13
(13)
(13) ), the approximation solution to
can be computed by
(29)
(29)
3.1.2. Algorithm 2
Since the values in Equation (Equation26
(26)
(26) ) can only be derived by the discrete measured data with errors, we must apply the numerical differential technique to get the corresponding discrete data for the values
by Equation (Equation14
(14)
(14) ). However, the problem of numerical differentiation is well known to be ill-posed, it means that any small errors for the measurement values on some specified points can cause large errors to the implemented derivative [Citation40–43]. Thus it is the key aim to develop a stable scheme to deal with the ill-posed problem. The traditional FDM is simple and effective for precise data, but it is failed to compute accurate derivative of the measured values with noisy data, since the size of mesh depends on the noise level, i.e. which should not be too small, in other words, the number of measured points should not be chosen too big, otherwise, it may be very large for the final errors of the approximation solutions [Citation41,Citation44].
Recently, some numerical differential schemes based on the Tikhonov regularization technique and the smoothing spline have been proposed [Citation40–42,Citation44,Citation45], based on a suitable strategy of the regularization parameter, these differential methods with regularization are effective and stable. In this paper, we use numerical differentiation with regularization method presented in [Citation41,Citation42] to compute the values
.
For given a set of measured values with the error data, and define
. Consider a smoothing functional on
:
(30)
(30) where
is a fixed integer,
, let
be a set of distinct points on
, and
is a regularization parameter under Tikhonov regularization sense.
Lemma 3.1
[Citation41]
Define
(31)
(31) where coefficients
and
satisfy
(32)
(32)
(33)
(33) then
is a unique minimizer of the smoothing functional (Equation30
(30)
(30) ), i.e.
,
.
Lemma 3.2
[Citation41]
There is a unique solution for linear system of Equations (Equation32(32)
(32) ) and (Equation33
(33)
(33) ).
By differentiating of (Equation31
(31)
(31) ) with respect to t, then we have
(34)
(34) Furthermore, the approximation values
of
can be obtained by (Equation14
(14)
(14) )
(35)
(35) For convenience, the above approach is called 3PNDS in this paper.
3.1.3. The convergence estimates of 3PNDS for without noise
The proof of the convergence estimate for 3PNDS consists of the following details. In order to express convenience and simplicity, we define
(36)
(36) and assume that
,
,
, combining with Equations (Equation9
(9)
(9) )–(Equation12
(12)
(12) ), (Equation21
(21)
(21) )–(Equation28
(29)
(29) ) and (Equation36
(36)
(36) ), then we have two corresponding systems for j=1 and
respectively as follows:
(37)
(37) and
(38)
(38) Suppose that
,
, according to Taylor's expansion,
and
satisfy the following formulas by Equations (Equation37
(37)
(37) ) and (Equation38
(38)
(38) )
(39)
(39) and
(40)
(40) where
,
,
,
,
and
are the truncation errors derived by the discretization of differential equation. In addition, if the given functions
,
,
(
) and
are continuous on the interval
or
, then the discretization values
and
are bounded, so there exists a positive constant K such that the following inequalities hold:
The error bound of Lagrange polynomial is developed as follows:
Lemma 3.3
[Citation46]
Let be distinct numbers in the interval
and
, and define
. Then, there exists a number
(generally unknown) between
, and satisfying the following formula:
where
is Lagrange interpolating polynomial of degree n given by
where
.
Theorem 3.1
Let ,
,
,
,
,
, then the truncation error order of 3PNDS can reach
at least.
Proof.
If the given point , where
, then we can obtain the following conclusion by Lemma 3.3:
(41)
(41) furthermore, x and t in Equation (Equation41
(41)
(41) ) are replaced by
and
, respectively, we have
(42)
(42) where
. We define the following linear operators:
(43)
(43) and
(44)
(44)
(45)
(45)
(46)
(46) Now we replace x and t in Equations (Equation43
(43)
(43) )–(Equation46
(46)
(46) ) with
and
, respectively. In addition, we define the following truncation error operators
,
and
on
, here the truncation errors derive from two parts, i.e. one is caused by the truncation of infinite Taylor series, the other comes from the truncation of Lagrange interpolation, then we have
(47)
(47)
(48)
(48)
(49)
(49) ♯ When j=0, since
in Equation (Equation6
(6)
(6) ). By the forms (Equation15
(15)
(15) )–(Equation20
(20)
(20) ) and (Equation43
(43)
(43) )–(Equation46
(46)
(46) ), combining with Taylor's expansion, we have
(50)
(50) and
(51)
(51)
(52)
(52)
(53)
(53) By the formulas (Equation47
(47)
(47) )–(Equation49
(49)
(49) ) and (Equation50
(50)
(50) )–(Equation53
(53)
(53) ), we can obtain the truncation error orders as follows:
(54)
(54)
(55)
(55)
(56)
(56) from the above deduction, the forms (Equation54
(54)
(54) )–(Equation56
(56)
(56) ) show that the truncation error order of 3PNDS can reach
at least for j=0.
♯ When , let
be the truncation error operator on
, then we have the following truncation error estimation of
by Equation (Equation42
(42)
(42) ):
(57)
(57) According to the forms (Equation42
(42)
(42) )–(Equation46
(46)
(46) ) and (Equation47
(47)
(47) )–(Equation49
(49)
(49) ), we can obtain the following conclusions:
(58)
(58)
(59)
(59)
(60)
(60) where
. In short, by the results (Equation54
(54)
(54) )–(Equation56
(56)
(56) ) and (Equation58
(58)
(58) )–(Equation60
(60)
(60) ), the truncation error order of 3PDNS can reach
at least. According to the above arguments, the truncation error order is independent of the distribution interval of
.
The estimates of the truncation errors and
are as follows:
Lemma 3.4
Suppose that ,
,
,
,
,
and
, then there exists a positive constant
such that
where
is independent of τ and h.
Proof.
The proof can be directly induced by the procedure of Theorem 3.1.
In practice, we can select a suitable small spatial-step h such that for 3PDNS, thus the fixed point
will not be located in the intervals
and
, further, making it close to the middle of the interval
. By (Equation39
(39)
(39) ), (Equation40
(40)
(40) ) and Lemma 3.4, it is shown that the truncated error order number can be improved from
to
, more details can be found in the following results.
Lemma 3.5
Let , there exists a spatial-step h such that
, then the error
satisfies the following estimate:
(61)
(61) where
,
are constants, and which are independent of h.
Proof.
By the given condition , assume that
, we note that s satisfies
, then
satisfies the following form by (Equation22
(22)
(22) )–(Equation24
(24)
(24) ) and (Equation42
(42)
(42) )
(62)
(62) further, we get the following estimation by the formula (Equation62
(62)
(62) ):
where
,
and
, according to the property of Lagrange interpolation basis functions, we note that
, and
and
are independent of h.
The range of stability for the formula (Equation21(21)
(21) )
is
in [Citation10]. In conclusion, the convergence estimate of
for 3PNDS is stated as follows.
Theorem 3.2
Suppose that ,
,
,
,
,
and
, let
,
and
, then there exists a constant
, which is independent of τ and h, such that
(63)
(63)
Proof.
The proof of Theorem 3.2 is developed through the following two cases.
Case 1. (a) If j=1, , there exists a constant
such that
, combining with Equation (Equation39
(39)
(39) ) and Lemma 3.4, we have
(64)
(64)
(b) In addition,
in Equation (Equation39
(39)
(39) ) satisfies the following estimation by Equation (Equation64
(64)
(64) ) and Lemmas 3.4–3.5
(65)
(65) where k=0 or M. Thus, combining with Equations (Equation64
(64)
(64) ) and (Equation65
(65)
(65) ), we have
(66)
(66) where
is a constant, and which is independent of τ and h.
Case 2. (a) If ,
,
and
, according to the formula (Equation40
(40)
(40) ), Lemmas 3.4 and 3.5, let
, then
satisfies the following estimation as
(67)
(67)
(b) In addition, if
,
, then
satisfies the following estimation by Equations (Equation40
(40)
(40) ), (Equation67
(67)
(67) ) and Lemmas 3.4 and 3.5
(68)
(68) Since
, then there must exist a constant
such that
, and let
, by the forms (Equation67
(67)
(67) ), (Equation68
(68)
(68) ) and
, we have
(69)
(69) where
is a constant, and which is independent of τ and h.
Combining with the forms (Equation66(66)
(66) ) and (Equation69
(69)
(69) ), we have
(70)
(70) where
is a positive constant, and which is independent of τ and h, the proof is completed.
Furthermore, based on Theorem 3.2, the error estimation for the original solution is as follows.
Theorem 3.3
Suppose that ,
,
,
,
,
and
, there exists a positive constant
such that the following error estimation holds
(71)
(71) where
is independent of τ and h.
Proof.
According to the condition , we know that
is bounded for any
, and assume that
. By Equation (Equation6
(6)
(6) ), it is clear that
for
, and suppose that
and
. By the formula (Equation13
(13)
(13) ), we have
(72)
(72) Next, suppose that
for
, by the forms (Equation12
(12)
(12) ), (Equation26
(26)
(26) ), Lemma 3.5 and Theorem 3.2, we provide the error estimation of
as follows:
(73)
(73) where
is a constant. By the above inequality (Equation73
(73)
(73) ), we know that
holds, then there must exist a constant
such that
, so we have
(74)
(74) where
,
,
,
and
are constants, which are independent of τ and h, the proof is completed.
In order to obtain the error estimation of , we first present some results as necessary preparations. According to Lemma 3 and Theorem 4 in [Citation41], the following lemmas are provided.
Lemma 3.6
[Citation41]
Let be any finite set of distinct points in
,
and
be any real multipliers such that
(75)
(75) furthermore, assume
, then the following linear functional:
(76)
(76) satisfies the conditions
(77)
(77) where
(78)
(78)
Similar to the proof in [Citation41], we have the following error estimation.
Lemma 3.7
Suppose that is an exact function in
, and
is an approximation of
in Lemma 3.1, we have the following estimate of
as
(79)
(79) where
,
and
are positive constants, and independent of τ, h and
. In addition, if
, the error estimate of
can be obtained by
in this case,
, as
.
Proof.
The proof of Lemma 3.7 consists of the following several steps.
Step 1. For any , there exists
such that
. In Lemma 3.6, replacing g with the error function
, and we take
,
,
, and
,
, where
is a basis function of Lagrange interpolation as follows:
(80)
(80) according to the property of Lagrange interpolation, it can be proved that
(81)
(81) In addition, since
and
obtained by Equation (Equation80
(80)
(80) ), so we have
(82)
(82) Step 2. By Lemma 3.6, we have
(83)
(83) further, the following estimate is developed by
(84)
(84) by Lemma 3.6, we have
(85)
(85) where
, and
is abbreviated below as
.
Moreover, it follows from result (Equation78(78)
(78) ) that
is equivalent to
(86)
(86) where
and
. In addition, by the Cauchy–Schwarz inequality, we have
(87)
(87) where
.
Step 3. According to the formula (Equation84(84)
(84) ), we get
(88)
(88) thus
(89)
(89) further, by the formulas (Equation77
(77)
(77) ) and (Equation89
(89)
(89) ), we have
(90)
(90) Since
for the exact function
, and
satisfies the following estimate by (Equation73
(73)
(73) ):
(91)
(91) thus we can obtain
(92)
(92) further
(93)
(93) On the other hand, we get
(94)
(94) Since
in (Equation30
(30)
(30) ), combining with (Equation90
(90)
(90) ), (Equation92
(92)
(92) )–(Equation94
(94)
(94) ), we have
(95)
(95) where
Furthermore, by (Equation95
(95)
(95) ), we can obtain
(96)
(96) where
,
and
are positive constants, and independent of τ, h and
. Specially, if
, the error estimate of
can be obtained by
in this case,
, as
, the proof is completed.
Lemma 3.8
[Citation47]
Let , and let
. There exists a finite constant
such that for
, and for every function f which is mth continuously differentiable on the open interval
, we have
(97)
(97)
By Lemmas 3.6–3.8, we obtain an error estimation of in the sense of
-norm as follows.
Theorem 3.4
There exist positive constants such that the following inequality holds:
where
are independent of τ, h and
. In addition, if
, the error estimate of
can be obtained by
where
, in this case,
, as
.
Proof.
In Lemma 3.8, we take a=0, b=T and , respectively. Suppose that
and
on
, we know that
is bounded, then there must exist a constant
such that
, and the assumption
in Theorem 3.3. Let
, by Lemma 3.7, for selecting a set of suitable small τ, h and
such that
(98)
(98) In the sense of
-norm, the error function
satisfies the following estimate:
(99)
(99) further, by (Equation99
(99)
(99) ), we can get
(100)
(100) where
,
are two positive constants.
If ,
holds, by formula (Equation73
(73)
(73) ), we have
(101)
(101) By Lemma 3.8, assume that
, and the formula (Equation93
(93)
(93) ), the following inequality yields
(102)
(102) In addition, we note that
for a,b>0,
. By (Equation98
(98)
(98) ), and
, we have
(103)
(103) Combining formulas (Equation100
(100)
(100) )–(Equation103
(103)
(103) ) yields
where
are positive constants, and independent of τ, h and
. Specially, if
, the error estimate of
can be obtained by
where
, in this case,
, as
, the proof is complete.
3.1.4. The convergence estimates of 3PNDS for with noise
In practice, since the measured data of , in the forms (Equation5
(5)
(5) ) and (Equation12
(12)
(12) ), always contain some noise, here we can assume that the given functions
and
are exact data, but
is an approximation of the exact function
with
for all
, where δ denotes a small noise error, then the formula (Equation12
(12)
(12) ) is replaced by
(104)
(104) Similarly, combining with the formula (Equation21
(21)
(21) ), we can use
in (Equation104
(104)
(104) ) to get an stable numerical solution
, and further to obtain
. Thus we can use
and
to compute
by the following formula:
(105)
(105) Since the values
in (Equation105
(105)
(105) ) include errors induced by computation and the noise of
, it is the key that we use the regularization method to approximate the exact
. Similar to (Equation30
(30)
(30) ), for the set of
with noise errors, and
, we define the following smoothing functional on
:
(106)
(106) where
is a regularization parameter, which is dependent on δ. Furthermore, according to the formulas (Equation31
(31)
(31) )–(Equation34
(34)
(34) ) and (Equation105
(105)
(105) ), we can obtain the regularized solutions
of the exact values
, moreover, using
to compute the approximation values
of the exact
.
Then we have the following estimation between an stable approximation solution and the exact
.
Theorem 3.5
Assume that ,
,
,
,
,
and
, let
for all
,
,
and
, then there exist positive constants
,
such that
where
and
are independent of τ, h and δ. Specially, when the temporal step
,
, and
, the following error estimation can be obtained by
where
is a positive constant, in this case,
, as
for
,
.
Proof.
Similar to the proof of Theorem 3.2, suppose ,
for all
,
,
,
and
, where the four bounds
,
,
and
are independent of δ. For simplicity, we define
,
. In order to prove the related result, we should discuss the following two cases, i.e. j=1 and
.
Case 1. If j=1, , there exists a constant
such that
, by Lemma 3.4 and Equation (Equation39
(39)
(39) ), we have
(107)
(107) In addition, according to Lemma 3.5, and Equations (Equation61
(61)
(61) ), (Equation107
(107)
(107) ), and the previous assumption
for
, let
, thus
satisfies the following estimation:
(108)
(108) Analogously, we have
(109)
(109) Combining with the formulas (Equation107
(107)
(107) ), (Equation108
(108)
(108) ) and (Equation109
(109)
(109) ), we have
(110)
(110) where
and
are positive constants.
Case 2. (a) If ,
and
, similar to (Equation67
(67)
(67) ), then
satisfies the following estimation as
(111)
(111) where
,
are positive constants, which are independent of τ, h and δ.
(b) If ,
, by
and the formulas (Equation40
(40)
(40) ), (Equation108
(108)
(108) ), (Equation109
(109)
(109) ), (Equation111
(111)
(111) ), and Lemmas 3.4, 3.5, then
satisfies the following estimation as
(112)
(112) In the above (Equation112
(112)
(112) ), based on the condition
, thus
. Let
,
, by (Equation111
(111)
(111) ), (Equation112
(112)
(112) ) and
, we get
(113)
(113) where
and
are positive constants.
Combining with the forms (Equation110(110)
(110) ) and (Equation113
(113)
(113) ), we have the following estimate of
as follows:
(114)
(114) where
,
are two positive constants, and independent of τ, h and δ.
In addition, when the temporal step ,
, by (Equation114
(114)
(114) ), we can obtain the estimate of
as follows:
(115)
(115) where
is a positive constant, in this case,
, as
for
,
, the proof is completed.
Next, we present the error estimation between the original solution and the approximation
as follows.
Theorem 3.6
Suppose that ,
,
,
,
,
and
, there exist positive constants
such that the following error estimation holds:
where
are independent of τ, h and δ. In addition, when the temporal step
, the error estimate of
can be obtained by
in this case,
, as
for
,
.
Proof.
The proof can be similarly proved as Theorem 3.3. According to some assumptions in Theorem 3.3, we know that . In addition, suppose that
, and
for all
, where
is independent of δ. Then there must exist a constant
such that
for
.
In addition, by Lemma 3.5, we have
(116)
(116) furthermore, according to (Equation114
(114)
(114) ) and (Equation116
(116)
(116) ), the error
for
satisfies the following estimate:
(117)
(117) where
,
and
are positive constants, which are independent of τ, h and δ. For simplicity, here we denote
in this paper.
Combining with the formulas (Equation13(13)
(13) ), (Equation114
(114)
(114) ) and (Equation117
(117)
(117) ), we get
(118)
(118) where
,
, and
are positive constants, which are independent of τ, h and δ.
Specially, when the temporal step , the error estimate of
can be obtained by
in this case,
, as
for
,
, the proof is completed.
Furthermore, we have the following error estimation between the Tikhonov regularized solution and the exact
.
Theorem 3.7
Suppose that is an exact function in
, and
is the Tikhonov regularized solution to
in (Equation106
(106)
(106) ), in the sense of
-norm, we have the following estimate of
as
where
are positive constants, and which are independent of τ, h, δ and
.
In addition, if taking the case of in Theorem 3.5, where
, and
, the following error estimation can be obtained by
in this case,
, as
, where
are positive constants, which are independent of τ, h, δ and
.
Proof.
The proof can be similarly proved as Lemma 3.7. Suppose that , by the forms (Equation80
(80)
(80) )–(Equation89
(89)
(89) ) and Lemma 3.6, we have the following results:
(119)
(119) where
and
.
Since for the exact function
, where
is a regularized solution of r, by (Equation106
(106)
(106) ) and (Equation117
(117)
(117) ),
satisfies
(120)
(120) thus we can obtain
(121)
(121) further, by (Equation121
(121)
(121) ), we get
(122)
(122) On the other hand, similar to (Equation94
(94)
(94) ), we have
(123)
(123) Thus, combining with (Equation119
(119)
(119) ), (Equation122
(122)
(122) ) and (Equation123
(123)
(123) ), we can get
(124)
(124) where
are positive constants, which are independent of τ, h, δ and
. Furthermore, by (Equation124
(124)
(124) ), we have
(125)
(125) where
,
,
,
,
,
and
, which are positive constants, and independent of τ, h, δ and
.
In addition, if we take the case of ,
in Theorem 3.5, and
for discussing the formula (Equation125
(125)
(125) ), thus
(126)
(126) where
which are independent of τ, h, δ and
. If
and
, then
, as
, the proof is complete.
Furthermore, we have the convergence estimate between the approximation solution and the exact
.
Theorem 3.8
In the sense of -norm, we have the following estimate of
as
where
are positive constants, and which are independent of τ, h, δ and
. Specially, if taking the case of
,
and
, the following error estimation can be obtained by
where
. In this case,
, as
.
Proof.
The proof can be similarly proved as Theorem 3.4. Suppose that
and
on
, we know that
is bounded, then there must exist a constant
such that
, and the assumption
in Theorem 3.3. Let
, and assume that
. In the sense of
-norm, by the forms (Equation14
(14)
(14) ) and (Equation105
(105)
(105) ), the error function
satisfies the following estimate:
(127)
(127) furthermore, by (Equation127
(127)
(127) ), we can get
(128)
(128) where
,
are two positive constants, and independent of τ, h, δ and
.
If ,
holds, by formula (Equation117
(117)
(117) ), we have
(129)
(129) By Lemma 3.8 and (Equation122
(122)
(122) ), the following inequality satisfies
(130)
(130) In addition, by Theorem 3.7, and
, we have
(131)
(131) Combining with the formulas (Equation127
(127)
(127) )–(Equation131
(131)
(131) ), we have
where
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
and
are positive constants, which are independent of τ, h, δ and
.
In addition, if we take the case of ,
and
, thus we have
where
. If
and
, then
, as
, the proof is completed.
3.2. Five-point numerical difference scheme
Let , in Equations (Equation15
(15)
(15) ) and (Equation16
(16)
(16) ), we choose an appropriate coefficient set
, then we can obtain the derived set
and the nodes-subscript set
in Table , so we can get general difference equation scheme
(132)
(132)
Table 2. The different configuration parameters in formula (Equation132(132) (132) ).
Similar to 3PNDS, where and
,
. We use quartic-Lagrange polynomial interpolation method to calculate
, assume that
,
(but
and
), then we have the following formula:
(133)
(133) where
denotes a quartic-Lagrange basis function, and
(134)
(134) where
,
are nodes in the spatial domain. Similar to the implementation for the formulas (Equation26
(26)
(26) )–(Equation35
(35)
(35) ) of 3PNDS, we can obtain the approximation values
and
to the values
and
, respectively. For convenience, the above approach is called 5PNDS in this paper. Similar to 3PNDS, we have the following truncation error estimation for 5PNDS.
Theorem 3.9
Let ,
,
,
,
,
, then the truncation error order of 5PNDS can reach
at least.
The convergence estimate of for 5PNDS is presented as follows.
Theorem 3.10
Suppose that ,
,
,
,
,
and
, let
,
and
, then there exists a constant
, which is independent of τ and h, such that
Proof.
The proof can be similarly proved as Theorem 3.2.
The error estimation of the original solution for 5PNDS is stated as follows.
Theorem 3.11
There exists a positive constant such that the following error estimation holds:
where
is independent of τ and h.
Similarly, we obtain an error estimation of for 5PNDS in the sense of
-norm as follows.
Theorem 3.12
There exist positive constants such that the following inequality holds:
where
are independent of τ, h and
. In addition, if
, the error estimate of
can be obtained by
where
, in this case,
, as
.
3.3. Including the case of with noise for 5PNDS
Similarly, we have the following estimation between an stable approximation solution and the exact
.
Theorem 3.13
Assume that ,
,
,
,
,
and
, let
for all
,
,
and
, then there exist positive constants
,
such that
where
and
are independent of τ, h and δ. Specially, when the temporal step
,
and
, the following error estimation can be obtained by
in this case,
, as
for
,
.
Next, we present the error estimation between the original solution and the approximation
as follows.
Theorem 3.14
Suppose that ,
,
,
,
,
and
, there exist positive constants
such that the following error estimation holds:
where
are independent of τ, h and δ. In addition, when the temporal step
, the error estimate of
can be obtained by
in this case,
, as
for
,
.
Finally, we have the convergence estimate between the approximation solution and the exact
.
Theorem 3.15
In the sense of -norm, we have the following estimate of
as
where
are positive constants, and which are independent of τ, h, δ and
. Specially, if taking the case of
,
and
, the following error estimation can be obtained by
where
. In this case,
, as
.
3.4. Seven-point numerical difference scheme
Let , in the formulas (Equation15
(15)
(15) ) and (Equation16
(16)
(16) ), we choose the appropriate coefficient set
, then we obtain the derived set
and the nodes-subscript set
in Table , so we can get the following difference equation scheme:
(135)
(135)
Table 3. The different configuration parameters in formula (Equation135(135) (135) ).
Similar to 5PNDS, we use quartic-Lagrange polynomial interpolation method to approximate according to Equation (Equation133
(133)
(133) ), the rest of approximation values
and
to the values
and
are computed, respectively, by the forms (Equation26
(26)
(26) )–(Equation35
(35)
(35) ) in the 3PNDS. For convenience, the above approach is called 7PNDS in this paper. Similar to 3PNDS, we have the following truncation error estimation for 7PNDS.
Theorem 3.16
Let ,
,
,
,
,
, then the truncation error order of 7PNDS can reach
at least.
The convergence estimate of for 7PNDS is proposed as follows.
Theorem 3.17
Suppose that ,
,
,
,
,
and
, let
,
and
, then there exists a constant
, which is independent of τ and h, such that
Proof.
The proof can be similarly proved as Theorem 3.2.
The error estimation of the original solution for 7PNDS is proposed as follows.
Theorem 3.18
There exists a positive constant such that the following error estimation holds:
where
is independent of τ and h.
Analogously, we obtain an error estimation of for 7PNDS in the sense of
-norm as follows.
Theorem 3.19
There exist positive constants such that the following inequality holds:
where
are independent of τ, h and
. In addition, if
, the error estimate of
can be obtained by
where
, in this case,
, as
.
3.5. Including the case of with noise for 7PNDS
Similarly, we have the following estimation between an stable approximation solution and the exact
.
Theorem 3.20
Assume that ,
,
,
,
,
and
, let
for all
,
,
and
, then there exist positive constants
,
such that
where
and
are independent of τ, h and δ. Specially, when the temporal step
,
, and
, the following error estimation can be obtained by
in this case,
, as
for
,
.
Next, we present the error estimation between the original solution and the approximation
as follows.
Theorem 3.21
Suppose that ,
,
,
,
,
and
, there exist positive constants
such that the following error estimation holds:
where
are independent of τ, h and δ. In addition, when the temporal step
, the error estimate of
can be obtained by
in this case,
, as
for
,
.
Finally, we have the convergence estimate between the approximation solution and the exact
.
Theorem 3.22
In the sense of -norm, we have the following estimate of
as
where
are positive constants, and which are independent of τ, h, δ and
. Specially, if taking the case of
,
, and
, the following error estimation can be obtained by
where
. In this case,
, as
.
4. Numerical examples
In order to test the efficiency of our method to solve the one-dimensional inverse parabolic differential equations with a control parameter, we present three different numerical examples. In numerical computation, we consistently choose ,
and
, respectively, in three numerical examples.
In practical applications, the inherent noisy errors are usually contained the measured values, so we should replace the original exact data in the initial and boundary conditions of problem (Equation1(1)
(1) )–(Equation4
(4)
(4) ) by the following formula:
(136)
(136) where δ denotes the noise level, rand() is a pseudo-random value, which can be generated by using MATLAB rand. Similarly, other given data
,
,
and
are obtained by the formula (Equation136
(136)
(136) ) in the numerical simulation of this paper. The numerical results are developed in the following details, and which are derived from the measured data with four different noise levels. The noise level δ is added to all given functions
,
,
,
and
in three numerical tests.
In addition, the ratios of the absolute error of with respect to its convergence order at point
are denoted by
,
and
for 3PNDS, 5PNDS and 7PNDS, respectively, as follows:
(137)
(137)
(138)
(138)
(139)
(139) based on the above description, we take the spatial-step
,
and
for 3PNDS, 5PNDS and 7PNDS, respectively, let
, where
.
In the following figures and tables described, and
denote the Root-Mean-Square (RMS) error and the maximum error between the exact solution
and the numerical solution
, respectively, where
.
and
are defined by
(140)
(140) and
(141)
(141)
Similar to Equations (Equation140(140)
(140) ) and (Equation141
(141)
(141) ),
and
denote the RMS error and the maximum error between the exact solution
and the numerical solution
, respectively, where
.
and
are defined by
(142)
(142) and
(143)
(143)
The regularization parameters above are important to the numerical results obtained by using the regularization scheme. As shown in Theorems 3.8, 3.15 and 3.22, when the parameters
, we can get the convergence order
,
. However, since the final error estimations include some constants which cannot be known, such prior information is unlikely to be used, so the appropriate values
are more difficult to directly obtain, and the case of
is not available in practice. In this paper, we select the parameters
by another heuristic method, which is similar to see literatures [Citation42,Citation45,Citation48], as follows:
(144)
(144) where the matrices
,
,
denotes the 2-norm of a matrix,
and
are positive integers. The optimal value
of
can be obtained by minimizing an error model, more details for the computation of values
may be found in [Citation41,Citation42]. In addition, with the external data containing different noise levels, the numerical results of the proposed schemes in this article are compared with the RBF method (hereinafter abbreviated as RBFs) given in [Citation14].
Example 4.1
We consider the first problem (Equation1(1)
(1) )–(Equation5
(5)
(5) ):
and Example 4.1 has the exact solution as follows:
In Figures and , the results present the values of and
obtained by 3PNDS, 5PNDS and 7PNDS with respect to different time levels
, respectively, the measured data are added to four various noise levels, where
and
in Example 4.1. When the noise level δ is smaller, it is shown that the numerical results of approximation solutions
get more accurate among the techniques 3PNDS, 5PNDS and 7PNDS for the following two cases: (a) the spatial-step h becomes smaller; (b) the points number k of the k-step discretization schemes (such as 3PNDS
, 5PNDS
and 7PNDS
) becomes bigger, but this effect is not obvious as the error level δ is growing. According to Figure and Table , it is observed that the approximation source
becomes more accurate, as the points number k increases. In addition, the numerical results basically keep unchanged to different noise level δ for taking the same numerical approach and spatial-step h, moreover, when δ becomes smaller, the accuracy of numerical results is generally increasing.
Figure 1. The RMS error of function obtained by 3PNDS, 5PNDS and 7PNDS, respectively, with four different noise levels added to the measured data, namely
and
in Example 4.1. (a) 3PNDS (
), (b) 5PNDS (
), (c) 7PNDS (
), (d) 3PNDS (
), (e) 5PNDS (
) and (f) 7PNDS (
).
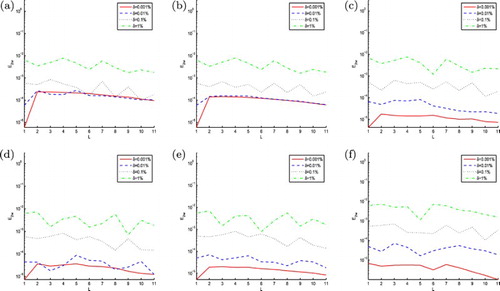
Figure 2. The maximum error of function obtained by 3PNDS, 5PNDS and 7PNDS, respectively, with four different noise levels added to the measured data, namely
and
in Example 4.1. (a) 3PNDS (
), (b) 5PNDS (
), (c) 7PNDS (
), (d) 3PNDS (
), (e) 5PNDS (
) and (f) 7PNDS (
).
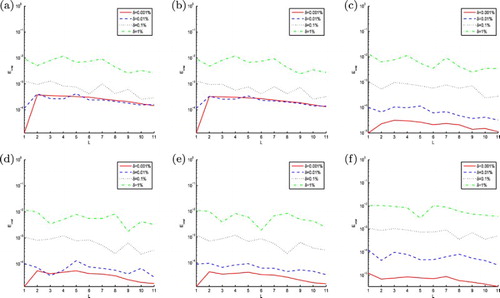
Figure 3. The ratio plots of ,
and
for 3PNDS, 5PNDS and 7PNDS, respectively, in Example 4.1, and the numbers ‘
’ indicates the expressed sequence for different
above. (a) 3PNDS, (b) 5PNDS and (c) 7PNDS.
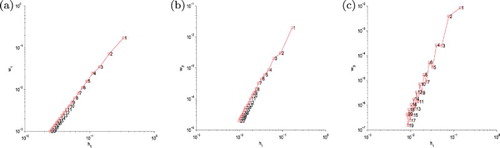
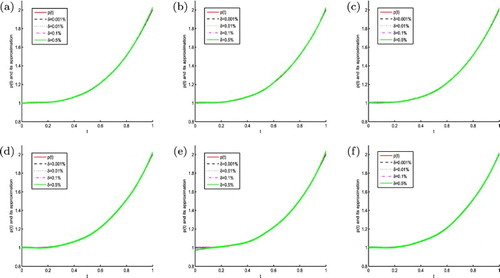
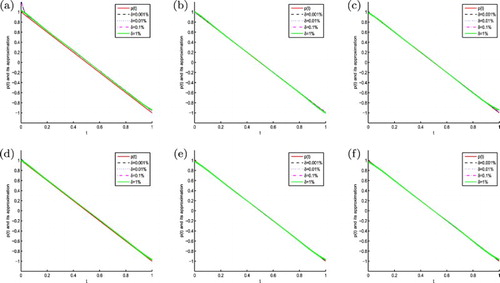
Figure 4. The exact function and its approximation for three difference schemes as 3PNDS, 5PNDS and 7PNDS with four different noise levels added to the measured data, namely
and
in Example 4.1. (a) 3PNDS (
), (b) 5PNDS (
), (c) 7PNDS (
), (d) 3PNDS (
), (e) 5PNDS (
) and (f) 7PNDS (
).
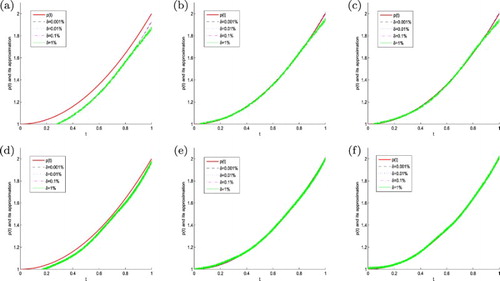
Table 4. The results of and obtained by 3PNDS, 5PNDS, 7PNDS and RBFs, respectively, taking the case of in (Equation144(144) (144) ) for Example 4.1.
Example 4.2
We consider the second problem (Equation1(1)
(1) )–(Equation5
(5)
(5) ):
and Example 4.2 has the exact solution
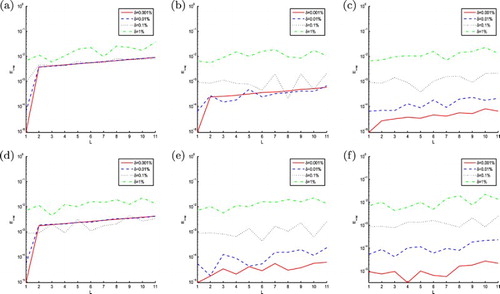
In Figures and , the numerical results display the values of and
derived by 3PNDS, 5PNDS and 7PNDS with respect to different time levels
, respectively, the measured data are added to four different error levels, namely
and
in Example 4.2. It is shown that the accuracy of approximation
becomes higher, when the noise level δ is smaller. We show that the accuracy of approximation
is getting more accurate and more stable, when the noise level δ becomes smaller by and Table . Furthermore, the illustrated results of
are also satisfactory and effective with the reduction of spatial-step h.
Figure 5. The RMS error of function obtained by 3PNDS, 5PNDS and 7PNDS, respectively, with four different noise levels added to the measured data, namely
and
in Example 4.2. (a) 3PNDS (
), (b) 5PNDS (
), (c) 7PNDS (
), (d) 3PNDS (
), (e) 5PNDS (
) and (f) 7PNDS (
).
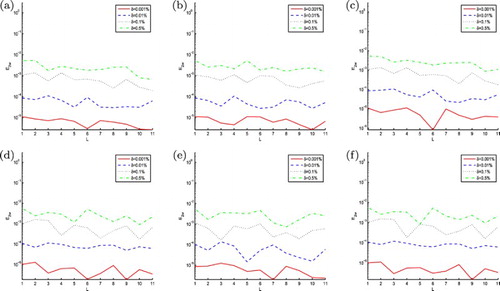
Figure 6. The maximum error of function obtained by 3PNDS, 5PNDS and 7PNDS, respectively, with four different noise levels added to the measured data, namely
and
in Example 4.2. (a) 3PNDS (
), (b) 5PNDS (
), (c) 7PNDS (
), (d) 3PNDS (
), (e) 5PNDS (
) and (f) 7PNDS (
).
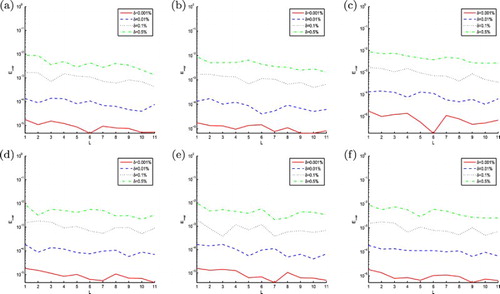
Figure 7. The ratio plots of ,
and
for 3PNDS, 5PNDS and 7PNDS, respectively, in Example 4.2, and the numbers ‘
’ indicate the expressed sequence for different
above. (a) 3PNDS, (b) 5PNDS and (c) 7PNDS.
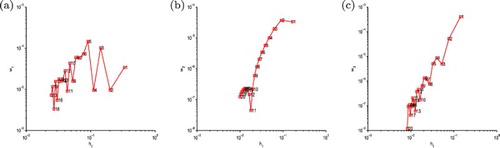
Figure 8. The exact function and its approximation for three difference schemes as 3PNDS, 5PNDS and 7PNDS with four different noise levels added to the measured data, namely
and
in Example 4.2. (a) 3PNDS (
), (b) 5PNDS (
), (c) 7PNDS (
), (d) 3PNDS (
), (e) 5PNDS (
) and (f) 7PNDS (
).
Example 4.3
We consider the third problem (Equation1(1)
(1) )–(Equation5
(5)
(5) ):
and Example 4.3 has the exact solution
The numerical results display the values of and
derived by 3PNDS, 5PNDS and 7PNDS with respect to different time levels
by Figures and , respectively; the measured data are added to four different error levels, namely
and
in Example 4.3. It is observed that the results of approximation solution
become more accurate, when the spatial-step h is smaller and the points number k ( k-step nodes) increases. Besides, the accuracy of
depends on the noise level δ according to the above three tests, if the selection of δ is a smaller value, the numerical solutions work effectively in this paper. In Figure and Table , the numerical results of approximation
are stable by the choice of some appropriate factors, such as the noise level δ, the regularization parameters
, the spatial-step h and the points number k.
Figure 9. The RMS error of function obtained by 3PNDS, 5PNDS and 7PNDS, respectively, with four different noise levels added to the measured data, namely
and
in Example 4.3. (a) 3PNDS (
), (b) 5PNDS (
), (c) 7PNDS (
), (d) 3PNDS (
), (e) 5PNDS (
) and (f) 7PNDS (
).
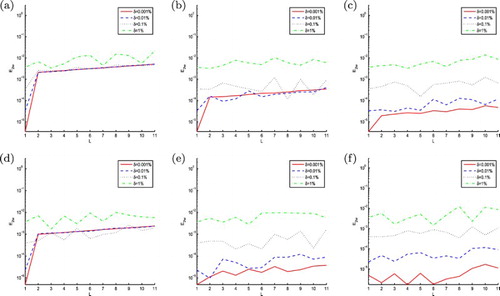
Figure 10. The maximum error of function obtained by 3PNDS, 5PNDS and 7PNDS, respectively, with four different noise levels added to the measured data, namely
and
in Example 4.3. (a) 3PNDS (
), (b) 5PNDS (
), (c) 7PNDS (
), (d) 3PNDS (
), (e) 5PNDS (
) and (f) 7PNDS (
).
In the theoretical analysis, when the regularization parameters , we can obtain the corresponding orders of convergence. As mentioned before, the rule is not a suitable choice for practical applications. We also give the numerical results in Tables , and , which are obtained by the choice rule
. In comparison, it is clear that the results obtained by the heuristic choice (Equation144
(144)
(144) ) are better, as shown in Tables , and .
Table 5. The results of and obtained by 3PNDS, 5PNDS and 7PNDS, respectively, taking the case of for Example 4.1.
Table 6. The results of and obtained by 3PNDS, 5PNDS, 7PNDS and RBFs, respectively, taking the case of in (Equation144(144) (144) ) for Example 4.2.
Table 7. The results of and obtained by 3PNDS, 5PNDS and 7PNDS, respectively, taking the case of for Example 4.2.
Table 8. The results of and obtained by 3PNDS, 5PNDS, 7PNDS and RBFs, respectively, taking the case of in (Equation144(144) (144) ) for Example 4.3.
Table 9. The results of and obtained by 3PNDS, 5PNDS and 7PNDS, respectively, taking the case of for Example 4.3.
In addition, according to Figures , and , we know that the inclination of the images, which are obtained by computing the ratios ,
and
at the point
, gets bigger through three numerical approaches as 3PNDS, 5PNDS and 7PNDS, it means that the convergence rate of the presented methods should be generally improved with increasing of the points number k ( k-step nodes).
Figure 11. The ratio plots of ,
and
for 3PNDS, 5PNDS and 7PNDS, respectively, in Example 4.3, and the numbers ‘
’ indicate the expressed sequence for different
above. (a) 3PNDS, (b) 5PNDS and (c) 7PNDS.
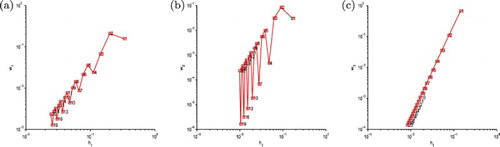
Figure 12. The exact function and its approximation for three difference schemes as 3PNDS, 5PNDS and 7PNDS with four different noise levels added to the measured data, namely
and
in Example 4.3. (a) 3PNDS (
), (b) 5PNDS (
), (c) 7PNDS (
), (d) 3PNDS (
), (e) 5PNDS (
) and (f) 7PNDS (
).
5. Conclusion
In this paper, we construct a family of multistep numerical difference schemes, which are applied in the one-dimensional parabolic inverse problem with a control parameter . Specially, we construct three difference schemes 3PNDS, 5PNDS and 7PNDS, and develop their corresponding truncation error estimations and convergence conclusions. It is well known that the problem of numerical differentiation with noisy errors is mildly ill-posed, we use the smoothing spline based on the Tikhonov regularization technique to obtain stable approximation solutions. The numerical results are given to observe that the accuracy of
and
depends on the selection of some factors, such as the noise level δ, the regularization parameters
, the time-step τ, the spatial-step h and the points number k (k-step nodes). If the step sizes τ, h, and the noise level δ are decreased, thus the approximation solutions
and
can get more accurate results. If the step sizes h, τ, and the noise level δ are chosen much more smaller, thus the approximation solution
can get more accurate results, however, it would require more computational cost in this case, we will improve this in our further work. In conclusion, the presented numerical schemes are stable and effective.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
References
- Hon YC, Wei T. A fundamental solution method for inverse heat conduction problem. Eng Anal Bound Elem. 2004;28:489–495. doi: 10.1016/S0955-7997(03)00102-4
- Hansen PC. Regularization tools: a Matlab package for analysis and solution of discrete ill-posed problems. Numer Algorithms. 1994;6:1–35. doi: 10.1007/BF02149761
- Cheng J, Yamamoto M. One new strategy for a priori choice of regularizing parameters in Tikhonov's regularization. Inverse Probl. 2000;16:31–38. doi: 10.1088/0266-5611/16/4/101
- Tikhonov AN, Arsenin VY. Solutions of ill-posed problems. Washington (DC), New York: V.H. Winston & Sons, John Wiley & Sons; 1977.
- Dehghan M. Numerical solution of one-dimensional parabolic inverse problem. Appl Math Comput. 2003;136:333–344.
- Dehghan M. Finding a control parameter in one-dimensional parabolic equations. Appl Math Comput. 2003;135:491–503.
- Dehghan M. An inverse problem of finding a source parameter in a semilinear parabolic equation. Appl Math Model. 2001;25:743–754. doi: 10.1016/S0307-904X(01)00010-5
- Cannon JR, Lin YP, Xu SZ. Numerical procedures for the determination of an unknown coefficient in semi-linear parabolic differential equations. Inverse Probl. 1994;10:227–243. doi: 10.1088/0266-5611/10/2/004
- Dehghan M. Parameter determination in a partial differential equation from the overspecified data. Math Comput Model. 2005;41:196–213. doi: 10.1016/j.mcm.2004.07.010
- Mitchell AR, Griffiths DF. The finite difference method in partial differential equations. New York: Wiley; 1980.
- Tatari M, Dehghan M. A method for solving partial differential equations via radial basis functions: application to the heat equation. Eng Anal Bound Elem. 2010;34:206–212. doi: 10.1016/j.enganabound.2009.09.003
- Chen W, Tanaka M. A meshless, integration-free, and boundary-only RBF technique. Comput Math Appl. 2002;43:379–391. doi: 10.1016/S0898-1221(01)00293-0
- Dehghan M, Tatari M. Determination of a control parameter in a one-dimensional parabolic equation using the method of radial basis function. Math Comput Model. 2006;44:1160–1168. doi: 10.1016/j.mcm.2006.04.003
- Ma LM, Wu ZM. Radial basis functions method for parabolic inverse problem. Int J Comput Math. 2011;88(2):384–395. doi: 10.1080/00207160903452236
- Arghand M, Amirfakhrian M. A meshless method based on the fundamental solution and radial basis function for solving an inverse heat conduction. Adv Math Phys. 2015;2015:1–8. Article ID 256726. doi: 10.1155/2015/256726
- Hon YC, Wei T. The method of fundamental solution for solving multidimensional inverse heat conduction problems. Comput Model Eng Sci. 2005;7(2):119–132.
- Dong CF, Sun FY, Meng BQ. A method of fundamental solutions for inverse heat conduction problems in an anisotropic medium. Eng Anal Bound Elem. 2007;31:75–82. doi: 10.1016/j.enganabound.2006.04.007
- Shen SY. A numerical study of inverse heat conduction problems. Comput Math Appl. 1999;38:173–188. doi: 10.1016/S0898-1221(99)00248-5
- Johansson T, Lesnic D. Determination of a spacewise dependent heat source. J Comput Appl Math. 2007;209:66–80. doi: 10.1016/j.cam.2006.10.026
- Dehghan M. Implicit solution of a two-dimensional parabolic inverse problem with temperature overspecification. J Comput Anal Appl. 2001;3(4):383–398.
- Dehghan M. Finite difference schemes for two-dimensional parabolic inverse problem with temperature overspecification. Int J Comput Math. 2000;75:339–349. doi: 10.1080/00207160008804989
- Chantasiriwan S. An algorithm for solving multidimensional inverse heat conduction problem. Int J Heat Mass Transf. 2001;44:3823–3832. doi: 10.1016/S0017-9310(01)00037-0
- Dehghan M. Determination of a control function in three-dimensional parabolic equations. Math Comput Simul. 2003;61:89–100. doi: 10.1016/S0378-4754(01)00434-7
- Dehghan M, Abbaszadeh M, Mohebbi A. The numerical solution of nonlinear high dimensional generalized Benjamin–Bona–Mahony–Burgers equation via the meshless method of radial basis function. Comput Math Appl. 2014;68:212–237. doi: 10.1016/j.camwa.2014.05.019
- Dehghan M, Mohammadi V. The numerical solution of Cahn–Hilliard (CH) equation in one, two and three-dimensions via globally radial basis functions (GRBFs) and RBFs-differential quadrature (RBFs-DQ) methods. Eng Anal Bound Elem. 2015;51:74–100. doi: 10.1016/j.enganabound.2014.10.008
- Lakestani M, Dehghan M. The use of Chebyshev cardinal functions for the solution of a partial differential equation with an unknown time-dependent coefficient subject to an extra measurement. J Comput Appl Math. 2010;235:669–678. doi: 10.1016/j.cam.2010.06.020
- Mohebbi A, Dehghan M. High-order scheme for determination of a control parameter in an inverse problem from the over-specified data. Comput Phys Comm. 2010;181:1947–1954. doi: 10.1016/j.cpc.2010.09.009
- Dehghan M. Fourth-order techniques for identifying a control parameter in the parabolic equations. Int J Eng Sci. 2002;40(4):433–447. doi: 10.1016/S0020-7225(01)00066-0
- Dehghan M, Shakeri F. Method of lines solutions of the parabolic inverse problem with an overspecification at a point. Numer Algorithms. 2009;50(4):417–437. doi: 10.1007/s11075-008-9234-3
- Shamsi M, Dehghan M. Determination of a control function in three-dimensional parabolic equations by Legendre pseudospectral method. Numer Methods Partial Differ Equ. 2012;28(1):74–93. doi: 10.1002/num.20608
- Saadatmandia A, Dehghan M. Computation of two time-dependent coefficients in a parabolic partial differential equation subject to additional specifications. Int J Comput Math. 2010;87(5):997–1008. doi: 10.1080/00207160802253958
- Cannon JR, Duchateau P. An inverse problem for an unknown source in heat equation. J Math Anal Appl. 1980;75:465–485. doi: 10.1016/0022-247X(80)90095-5
- Cannon JR, Lin Y, Wng S. Determination of source parameter in parabolic equation. Meccanica. 1992;27:85–94. doi: 10.1007/BF00420586
- Macbain JA, Bendar JB. Existence and uniqueness properties for the one-dimensional magnetotellurics inversion problem. J Math Phys. 1986;27:645–649. doi: 10.1063/1.527219
- Macbain JA. Inversion theory for a parametrized diffusion problem. SIAM J Appl Math. 1987;47:1386–1391. doi: 10.1137/0147091
- Cannon JR, Lin Y. An inverse problem of finding a parameter in a semi-linear heat equation. J Math Anal Appl. 1990;145:470–484. doi: 10.1016/0022-247X(90)90414-B
- Cannon JR, Lin YP. Determination of a parameter p(t) in some quasi-linear parabolic differential equations. Inverse Probl. 1988;4:35–45. doi: 10.1088/0266-5611/4/1/006
- Cannon JR, Lin YP. Determination of parameter p(t) in Ho¨lder classes for some semilinear parabolic equations. Inverse Probl. 1988;4:595–606. doi: 10.1088/0266-5611/4/3/005
- Li CJ. A kind of multistep finite difference methods for arbitrary order linear boundary value problem. Appl Math Comput. 2008;196:858–865.
- Hanke M, Scherzer O. Inverse problems light: numerical differentiation. Am Math Mon. 2001;108(6):512–521. doi: 10.1080/00029890.2001.11919778
- Wei T, Li M. High order numerical derivatives for one-dimensional scattered noisy data. Appl Math Comput. 2006;175:1744–1759.
- Zhang YF, Li CJ. A Gaussian RBFs method with regularization for the numerical solution of inverse heat conduction problems. Inverse Probl Sci Eng. 2016;24(9):1606–1646. doi: 10.1080/17415977.2015.1131825
- Engl HW, Hanke M, Neubauer A. Regularization of inverse problems. Dordrecht/Boston/London: Kluwer Academic Publishers; 1996.
- Wang YB, Jia XZ, Cheng. J. A numerical differentiation method and its application to reconstruction of discontinuity. Inverse Probl. 2002;18:1461–1476. doi: 10.1088/0266-5611/18/6/301
- Hào DN, Chuong LH, Lesnic. D. Heuristic regularization methods for numerical differentiation. Comput Math Appl. 2012;63:816–826. doi: 10.1016/j.camwa.2011.11.047
- Süli E, Mayers D. An introduction to numerical analysis. Cambridge (UK): Cambridge University Press; 2003.
- Adams RA. Sobolev spaces, pure and applied mathematics. Vol. 65. New York/London: Academic Press; 1975.
- de Boor C. Spline toolbox for use with matlab. Natick: The MathWorks, Inc.; 1992.