

ABSTRACT
An inverted ant cellular automata model called IACA-DI is proposed for the coordination of a swarm of robots performing the surveillance task. The swarm communicate indirectly through the repulsive pheromone, which is available as neighborhood information. The pheromone is deposited at each time step by each robot over its neighborhood. The new model started from a previous one named IACA. However, a discrete modeling of the pheromone diffusion is used in IACA-DI returning a sparser distribution of the robots over the environment. Next movement decisions are based on stochastic cellular automata rules that use the pheromone levels in the neighborhood to perform a probabilistic draw. While in IACA all the neighborhood cells participate in this draw, just a subgroup of them participate in the IACA-DI. It is formed by elite cells ? those with the lowest pheromone levels - and some random selected ones. Besides, the cell that keeps the current robot’s direction receives an increment in its probability to be chosen, giving an inertial tendency to the robot motion. Simple simulations were performed enabling to refine parameters and to choose the better strategies. After this refinement, the resultant model was implemented in the simulation platform Webots™ aiming to evaluate IACA-DI with real-world robotic architecture in more realistic scenarios.
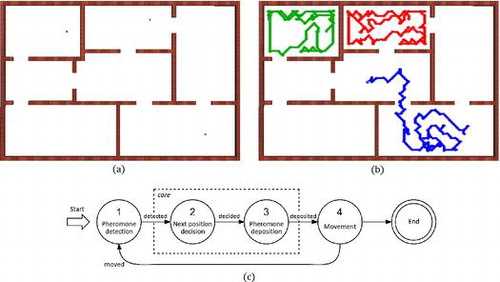
IACA-DI is a new model for the coordination of robot swarms performing the surveillance task. It is based on cellular automata modeling and the swarm communicate indirectly through the repulsive pheromone deposited by the robots in the environment cells. Letters (a) and (b) show two snapshots from a simulation of a 3-robots swarm performing the surveillance task. The robots start at random positions in an environment composed by 7 rooms in (a). Thus, based on the IACA-DI decisions, they start to make steps to explore the environment aiming to cover all the rooms in a short interval of time. The trace of each robot after 100 time steps is shown in (b) by representing each individual trajectory with a different color. The behavior of each robot is managed by the IACA-DI model, which can be represented by the FSM with 4 states in (c). Different strategies and formulations were investigated for the two major states ‘next position decision’ and ‘pheromone deposition’. The resultant IACA-DI model is analyzed here using simulations performed in Webots™ platform -as the snapshots shown in (a) and (b) -with real-world robotic architectures.
Graphical Abstract
Notes
No potential conflict of interest was reported by the authors.