Abstract
Background and purpose New computer-assisted measurement algorithms have been established to support the surgeon during total joint replacement intraoperatively. We asked whether the assessment of leg length and offset measured with an imageless navigation system is reliable during simulated total hip arthroplasty in a sawbone model test bench.
Methods and results We found no statistically significant difference between change in leg length and offset measured on a millimeter scale connected to the test bench and that obtained with the calculation algorithm of the imageless navigation system.
Interpretation Measurement of leg length and offset with an imageless navigation system is reliable during simulated total hip arthroplasty. The leg length situation algorithm offers the advantage of measuring leg length and offset by determination of the change in position of the femur relative to the pelvic coordinate system without the need to calculate the center of rotation of the hip joint. Further studies should address the accuracy of this imageless stem navigation method in an anatomical and clinical setting.
To optimize function, hip mechanics should be normalized as much as possible during total hip arthroplasty (THA). This includes restoration of leg length and femoral offset. Femoral offset correlates with instability, muscle forces, and range of motion (McGrory et al. Citation1995, Spalding Citation1996, Sakalkale et al. Citation2001, Bourne and Rorabeck Citation2002). Marked leg length discrepancy can contribute to gait asymmetry, knee and back pain, sciatic nerve palsy, and abnormal force transmission across the hip joint, and it may contribute to prosthesis loosening (Williamson and Reckling Citation1978, Friberg Citation1983, Edeen et al. Citation1995, Bose Citation2000, Gurney et al. Citation2001, Parvizi et al. Citation2003). Moreover, patient dissatisfaction due to functional and cosmetic problems associated with leg length difference after THA has become an increasing cause of litigation in the Unites States (Nercessian Citation1999, Hoffmann and Skrzynski 2000).
The use of computer navigation in arthroplasty is increasing. Imageless navigation systems without the need for pre- or intraoperative image acquisition increase the accuracy in positioning the acetabular component and reduce the number of outliers (Leenders et al. Citation2002, Dorr et al. Citation2005, Kalteis et al. Citation2006). We wanted to determine whether intraoperative assessment of leg length and offset would be reliable using an imageless navigation system during simulated THA with a sawbone model test bench.
Material and methods
THA was simulated with a sawbone model test bench () consisting of a statically fixed pelvis saw-bone and a movable femur sawbone (full male pelvis with sacrum, solid foam; femur large/medium, foam cortical shell) (Sawbone; Pacific Research Laboratories, Vashon, WA) that was connected to a calibrated wooden spacer on the posterior epicondyle axis (). The wooden spacer was positioned on millimeter paper, which permitted measurement of changes in leg length on its transverse edge and offset changes on its longitudinal edge, within±1 mm. Reference pins were inserted into the anterior superior iliac spine and into the distal third of the femur (). Femur and pelvis were loosely assembled and the anatomical landmarks (anterior superior iliac spine, pubic tubercle on both sides, femoral epicondyles, piriformis fossa point) were registered using a reference pointer. The position of the femoral reference frame relative to the pelvic reference frame was then stored with an imageless navigation system (VectorVision Hip 5.0 unlimited; BrainLAB, Feldkirchen, Germany) and the outline of the planar wooden spacer was marked. Surgery was consectively simulated in 20 (10 right, 10 left) sawbone hips. Press-fit acetabular components and various cement-free hydroxyapatite-coated stems (standard offset, lateralized, high offset) and head lengths from +1 to +9 mm were used (Pinnacle cup, Corail stem; DePuy, Warsaw, IN).
Figure 1. Sawbone model test bench set-up.

Figure 2. Postoperative visual control of change in leg length and offset with a wooden spacer on mm paper. Inset: outline of position marked preoperatively.

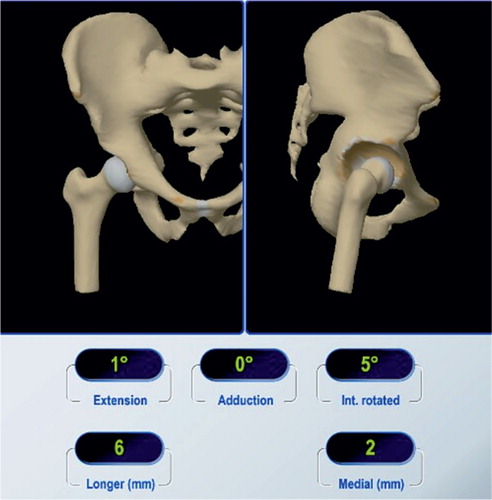
As the main goal of this experiment was to assess the accuracy of the system, we mainly focused on stable positioning of the acetabular cup and femoral stem instead of a complete equalization of leg length and offset. After implantation, the so-called “leg situation” algorithm of the system guides the surgeon to return the femur into exactly the same neutral orientation that it was in before arthroplasty. Once the leg is within±5° of that initial position, the change in leg length and offset is displayed (). Again, the outline of the planar wood spacer was marked. Each measurement was repeated 3 times and the average results are reported here. The difference between change in leg length/offset measured on the millimeter paper and that calculated by the navigation system was analyzed using the paired-samples t-test procedure. Statistical comparisons were made at the 5% level of significance (at p=0.05).
Figure 3. Intraoperative leg length and offset measurements obtained with the leg situation algorithm using an imageless navigation system.
Results
In summary, no statistically significant differences in changes of leg length and offset were detected between those measured on the millimeter scale connected to the test bench and those obtained from the calculation algorithm of the imageless navigation system (Table).
Measurements of leg length (mm) and offset (mm): millimeter paper versus imageless navigation. Negative prefix indicates leg length shortening/offset medialization; positive prefix indicates leg length extension/offset lateralization
Discussion
Measurement of leg length and offset with an imageless navigation system appears to be reliable when THA is simulated in a sawbone model test bench. Usually, the surgeon addresses the equalization of leg length and restoration of offset by preoperative physical examination, manual and/or computer-assisted templating, and/or the use of mechanical tools, pins and tape measures (Ranawat et al. Citation2001, Shiramizu et al. Citation2004). In this study, we tested the accuracy of an imageless navigation system as an intraoperative measurement tool for leg length and offset. The femoral reference frame is tracked in the pelvic coordinate system before and after joint replacement. This method guides the surgeon to return the femur into exactly the same orientation relative to the pelvis that it was in before reconstruction, and therefore eliminates the need to calculate the center of the hip or to establish a femoral coordinate system. Using the CT-based version of this measurement algorithm, it was found in a previous clinical study that there was a mean difference of −0.5±1.77 mm when comparing the changes in leg length intraoperatively with pre- and postoperative measurements of leg length from plain radiographs (Murphy and Ecker Citation2007).
To our knowledge, until now no study has been published that has investigated the accuracy of this imageless method. Our study does, however, have several limitations. Extrapolation of data from an in vitro sawbone model test bench to real surgery has obvious limitations, such as the absence of surrounding soft tissue and an idealized acquisition of anatomical landmarks. Determination of the pelvic coordinate system (Langlotz et al. Citation2006), reference pin stability (Kendoff et al. Citation2007), and potential stress fracture at the pinhole (Jung et al. Citation2007) remain possible problems in computer-assisted surgery in the clinical setting. Moreover, in our in vitro experiment, we were able to place the sawbone pelvis and femur in an idealized neu-tral-null position. The robustness and reliability of the system in difficult anatomical situations cannot therefore be directly extrapolated to circumstances in vivo. Due to the fact that imageless navigation abandons the need for additional pre- or intraoperative image acquisitions or exposure to radiation, it seems important that further studies should now investigate the accuracy and reliability of these new imageless stem navigation algorithms in the presence of surrounding soft tissue in an anatomical and clinical setting.
The help of Ms Sabine Gneiting and Mr Jacek Kluzik is highly appreciated.
All authors participated in conception and execution of the study. The design of the study was led by TR, who also supervised the project.
- Bose W J. Accurate limb–length equalization during total hip arthroplasty. Orthopaedics 2000; 23: 433–6
- Bourne R B, Rorabeck C H. Soft tissue balancing: the hip. J Arthroplasty 2002; 17(Suppl 1)17–22
- Dorr L D, Hishiki Y., Wan Z., Newton D., Yun A. Development of image–less computer navigation for acetabular component position in total hip replacement. Iowa Orthop J 2005; 25: 1–9
- Edeen J., Sharkey P F, Alexander A H. Clinical significance of leg–length inequality after total hip arthroplasty. Am J Orthop 1995; 24: 347–51
- Friberg O. Clinical symptoms and biomechanics of lumbar spine and hip joint in leg length inequality. Spine 1983; 8: 643–51
- Gurney B., Mermier C., Robergs R. Effects of limb–length discrepancy on gait economy and lower–extremity muscle activity in older adults. J Bone Joint Surg (Am) 2001; 83: 907–15
- Hofmann A A, Skrzynski M C. Leg–length inequality and nerve palsy in total hip arthroplasty: a lawyer awaits!. Orthopedics 2000; 23: 943–4
- Jung H J, Jung Y B, Song K S, Park S J, Lee J S. Fractures associated with computer–navigated total knee arthroplasty. A report of two cases. J Bone Joint Surg (Am) 2007; 89: 2280–4
- Kalteis T., Handel M., Baethis H, Tingart M., Grifka J. Imageless navigation for insertion of the acetabular component in total hip arthroplasty: Is it as accurate as CT–based navigation?. J Bone Joint Surg (Br) 2006; 88: 163–7
- Kendoff D., Gardner M J, Krettek C., Hüfner T., Citak M. Reference markers in computer aided orthopaedic surgery: rotational stability testings and clinical implications. Arch Orthop Trauma Surg 2007; 3, (Epub ahead of print)
- Langlotz F., Nolte L P, Tannast M. The foundations of computer assisted surgery. Orthopaede 2006; 35: 1032–7
- Leenders T., Vandevelde D., Mahieu G., Nuyts R. Reduction in variability of acetabular cup abduction using computer assisted surgery: a prospective and randomized study. Comput Aided Surg 2002; 7: 99–106
- McGrory B J, Morrey B F, Cahalan T D, An K N, Cabanela M E. Effect of femoral offset on range of motion and abductor muscle strength after total hip arthroplasty. J Bone Joint Surg (Br) 1995; 77: 865–9
- Murphy S., Ecker T. Evaluation of a New Leg Length Measurement Algorithm in Hip Arthroplasty. Clin Orthop 2007; 463: 85–9
- Nercessian O A. Intraoperative complications. Revision total hip arthroplasty, M E Steinberg, J P Garino. Lippincott Williams & Wilkins Philadelphia. 1999; 109–20
- Parvizi J., Sharkey P F, Bissett G A, Rothman R H, Hozack W J. Surgical treatment of limb–length discrepancy following total hip arthroplasty. J Bone Joint Surg (Am) 2003; 85: 2310–7
- Ranawat C S, Rao R R, Rodriguez J A, Bhende H S. Correction of limb–length inequality during total hip arthroplasty. J Arthroplasty 2001; 16: 715–20
- Sakalkale D P, Sharkey P F, Eng K., Hozack W J, Rothman R H. Effect of femoral component offset on polyethylene wear in total hip arthroplasty. Clin Orthop 2001; 388: 125–34
- Shiramizu K., Naito M., Shitama T., Nakamura Y., Shitama H. L–shaped caliper for limb length measurement during total hip arthroplasty. J Bone Joint Surg (Br) 2004; 86: 966–9
- Spalding T J. Effect of femoral offset on motion and abductor muscle strength after total hip arthroplasty. J Bone Joint Surg (Br) 1996; 78: 997–8
- Williamson J A, Reckling F W. Limb length discrepancy and related problems following total hip joint replacement. Clin Orthop 1978; 134: 135–8