
Abstract
Goal: This paper aims to provide an overview with quantitative information of existing 3D-printed upper limb prostheses. We will identify the benefits and drawbacks of 3D-printed devices to enable improvement of current devices based on the demands of prostheses users.
Methods: A review was performed using Scopus, Web of Science and websites related to 3D-printing. Quantitative information on the mechanical and kinematic specifications and 3D-printing technology used was extracted from the papers and websites.
Results: The overview (58 devices) provides the general specifications, the mechanical and kinematic specifications of the devices and information regarding the 3D-printing technology used for hands. The overview shows prostheses for all different upper limb amputation levels with different types of control and a maximum material cost of $500.
Conclusion: A large range of various prostheses have been 3D-printed, of which the majority are used by children. Evidence with respect to the user acceptance, functionality and durability of the 3D-printed hands is lacking. Contrary to what is often claimed, 3D-printing is not necessarily cheap, e.g., injection moulding can be cheaper. Conversely, 3D-printing provides a promising possibility for individualization, e.g., personalized socket, colour, shape and size, without the need for adjusting the production machine.
Upper limb deficiency is a condition in which a part of the upper limb is missing as a result of a congenital limb deficiency of as a result of an amputation.
A prosthetic hand can restore some of the functions of a missing limb and help the user in performing activities of daily living.
Using 3D-printing technology is one of the solutions to manufacture hand prostheses.
This overview provides information about the general, mechanical and kinematic specifications of all the devices and it provides the information about the 3D-printing technology used to print the hands.
Implications for rehabilitation
Introduction
Over the last 5 years, significant development has occurred in 3D-printing of upper limb prostheses. All over the world people are designing and printing new devices that can easily easy fit a human arm. Scientific papers have been published regarding research in the field of 3D-printed upper limb prostheses.[Citation1–7] People are developing prostheses individually, and large communities have been established. Most of the development of 3D-printed prostheses began after the establishment of the global community e-NABLE. This community has grown into a worldwide movement of tinkerers, engineers, 3D-printing enthusiasts, occupational therapists, university professors, designers, parents, families, artists, students, teachers and people who have developed 3D-printed prostheses.[Citation8] It all started with the idea of developing a cheap hand prosthesis.[Citation9] The cost of a commercial body-powered prosthetic hand can range from $4000 to $10,000,[Citation10] and the cost of an externally powered prosthetic hand can range from $25,000 to $75,000.[Citation10,Citation11] The beginning of the development of a 3D-printed hand prosthesis for people who cannot afford an expensive commercial prosthesis resulted in the Robohand, as shown in .
Figure 1. Robohand: the hand that was the inspiration for the development of the global community. Image reproduced with permission from Brod Marsh on behalf of Robohand Australia see http://www.robohand.net/wp-content/uploads/2013/03/2013-03-29-11-10-58-b.jpg, i.e., the copyright holder.
3D-printing is an additive manufacturing technique. Products are built up layer by layer instead of removing material from a large piece of material, such as in CNC milling. 3D-printing has several advantages compared with other manufacturing techniques [Citation12,Citation13]:
It is possible to make products out of one part; therefore, no assembly is required.
There is large design freedom; therefore, highly complex geometries can be made.
Designs can easily be personalized and customized; there is no need to change the machine.
Parts can be produced cheaply and quickly from idea to end product, which gives the advantage of rapid design improvements.
3D-printing also has disadvantages compared to other manufacturing techniques [Citation14,Citation15]:
It is hard to predict the mechanical properties. The resulting strength of a part is highly dependent on the fabrication method, and various parameters can be selected depending on the printing orientation.
The accuracy is highly affected by material shrinkage, different machine parameters and errors induced by the CAD/CAM software as well as post processing.
The size of an object is limited by the size of the printer. Very large objects cannot be made with current 3D-printing technology.
3D-printers can work with a limited amount of materials compared with conventional manufacturing, which can work with nearly any material.
Problem
Although many upper limb prostheses are being 3D-printed all over the world, to the authors’ knowledge, there are no specific design guidelines and there is no overview of all of the various devices that have been designed and 3D-printed so far. Some scientific research is ongoing in the field of 3D-printing upper limb prostheses, but currently, most of the 3D-printing of these devices is performed by trial and error.
Goal
Our goal is to provide an overview with quantitative information about existing 3D-printed upper limb prostheses. We will identify the benefits and drawbacks of 3D-printed devices to enable improvements of current devices based on the demands of prostheses users.
Methods
Currently, little information on 3D-printed hand prostheses is available in the peer-reviewed literature. Therefore, information from Internet databases and websites focused on 3D-printing were included. The review consists of two parts: first, the Scopus and Web of Science databases were used; second, an Internet search was performed on three websites:
Three websites were used. The first website contains a large database of 3D-printed hand prostheses that have been developed for the worldwide community e-NABLE. The second and third websites provide the most up to date information in the field of 3D-printing. Only unique devices identified through the literature and through website searches were included. Devices based on similar designs were excluded. Only results in the English language were used in this literature review. The database and Internet searches were carried out using the following keywords: 3D-printing, rapid prototyping, hand, upper limb, prosthetic, prosthetics and prostheses. Quantitative information on the mechanical and kinematic specifications and 3D-printing technology used were extracted from the papers and websites.
Exclusion and inclusion criteria
Partial finger prostheses and custom prostheses made for handling a specific tool were excluded in the overview. Articles related to the topic that were not found with the search criteria but found from references in other papers were included.
Results
The review resulted in an overview with seven devices found in the scientific literature and 51 devices found on the Internet. The results are presented in three tables. The first table contains general specifications and the mechanical characteristics of the hands. The second table provides information about the kinematics of the hands. The third table provides information from the field of 3D-printing technology that regarding the hands. Each table is divided into two parts. The first part shows the 3D-printed upper limb prostheses found in the scientific literature. The second part of the table shows the devices found from the Internet search. Several specifications or characteristics from the prostheses are unknown and are identified with an “–”symbol in the tables.
Mechanical specifications
Type of prosthesis and type of actuation
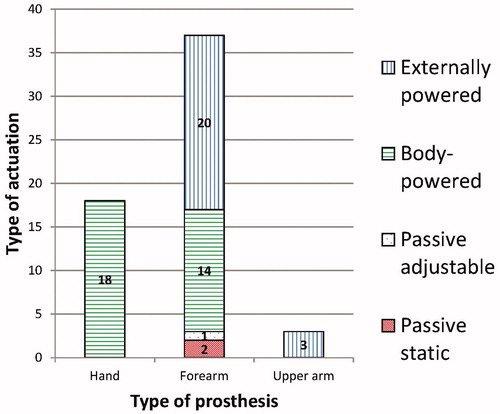
The general specifications of the prostheses and mechanical specifications of the fingers are shown in . Some examples of the 3D-printed upper limb prostheses are shown in . shows the type of prosthesis. These can be specified as three different levels of prostheses:
Figure 2. Examples of 3D-printed upper limb prostheses (a) Andrianesis’ Hand: an externally powered forearm prosthesis. Andrianesis and Tzes [Citation1], with permission of Springer. (b) Gosselin’s hand: a body powered forearm prosthesis. Original source: Laliberte et al. No changes made. Reproduced under creative commons attribution 3.0 [3]. (c) Cyborg beast: a body-powered hand prosthesis. Published with permission of Zuniga [Citation21]. (d) Handiii COYOTE: an externally powered forearm prosthesis. ©exiii, Inc. published with permission [Citation34]. (e) IVIANA 2.0: a passive forearm prosthesis. Published with permission of Evan Kuester [Citation37]. (f) Scand: a passive adjustable forearm prosthesis. Original source http://www.instructables.com/id/3D-Printing-Prosthetic-Hand-Make-it-Real-Challen/Scott Allen. No changes made. Reproduced under creative commons attribution 3.0 [Citation57].
![Figure 2. Examples of 3D-printed upper limb prostheses (a) Andrianesis’ Hand: an externally powered forearm prosthesis. Andrianesis and Tzes [Citation1], with permission of Springer. (b) Gosselin’s hand: a body powered forearm prosthesis. Original source: Laliberte et al. No changes made. Reproduced under creative commons attribution 3.0 [3]. (c) Cyborg beast: a body-powered hand prosthesis. Published with permission of Zuniga [Citation21]. (d) Handiii COYOTE: an externally powered forearm prosthesis. ©exiii, Inc. published with permission [Citation34]. (e) IVIANA 2.0: a passive forearm prosthesis. Published with permission of Evan Kuester [Citation37]. (f) Scand: a passive adjustable forearm prosthesis. Original source http://www.instructables.com/id/3D-Printing-Prosthetic-Hand-Make-it-Real-Challen/Scott Allen. No changes made. Reproduced under creative commons attribution 3.0 [Citation57].](/cms/asset/c17c036f-668e-47b5-af76-f4608d4a55bd/iidt_a_1253117_f0002_c.jpg)
Table 1. General specifications and mechanical specifications of the 3D-printed hand prostheses.
Hand (18): The amputation level is a partial hand.
Forearm (37): The amputation level is below the elbow.
Upper arm (3): The amputation level is above the elbow.
The various types of actuation for the various types of prostheses are shown in . All prostheses for people with partial hand loss are body powered. There are four actuation methods for forearm prostheses: two are passive static, one is passive adjustable, 14 are body powered and 20 are externally powered. For externally powered prostheses, 19 are electrically powered and one is powered by pressurized air. All the upper arm prostheses are externally powered and all are electrically powered.
Figure 3. Almost two-thirds of the devices are forearm prostheses from which slightly more than half of the devices are externally powered.
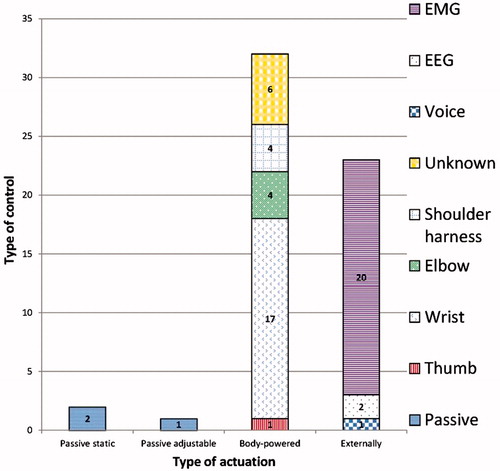
Type of actuation and type of control
The different types of actuation for the different types of control are shown in . The two passive static prostheses [Citation37,Citation50] are a decorative prosthesis, as opposed to the other prostheses, which are more practical and more functional prostheses. One of the prosthesis is passive adjustable.[Citation57] This prosthesis has four rigid fingers and an adjustable thumb that is made by modifying an existing prosthetic hook. The 32 body-powered prostheses can be divided into prostheses controlled by flexing the thumb (1), flexing the wrist (17), flexing the elbow (4) and through the use of a shoulder harness (4), and for six prostheses, the actuation method was not mentioned. It is unknown how these devices are actuated. Presumably, they can be used with a shoulder harness because they all make use of one output cable that controls all the fingers. There were 23 prostheses found that are externally powered from, two of which are controlled by electroencephalography (EEG), 20 of which are controlled by electromyography (EMG) and one of which is voice controlled.[Citation24]
Figure 4. Slightly more than half of all the prostheses are body powered from which slightly more than half of the devices are controlled by the wrist.
Weight
The weight of only 11 of the 58 printed upper limb prostheses is specified, as shown in . The lightest device was developed by M. Groenewegen [Citation5] and weighs 71 g. The heaviest device is the Roboarm developed by Unlimited Tomorrow,[Citation54] with a weight of 2000 g. The remainder of the hands have a weight ranging from 132 g [Citation21] to 960 g,[Citation6] with most of them (6) ranging from 240 g [Citation4] to 450 g.[Citation23,Citation36] The weight of some of the devices given in the table is not the total weight of the prosthesis:
Table 2. Weight of the 3D-printed hand prostheses. Only 11 of the 58 3D-printed upper limb prostheses specified their weights.
Although the Cyborg Beast has the second lowest weight (131.5 g) compared with the others, this weight is of a prosthesis for a 3-year child. To print this hand for a 16-year-old child, it should be scaled by 140%, which would result in a weight of 184.2 g.[Citation67]
The Roboarm is a lot heavier than the other prostheses because it is a complete arm. The developers state that it is made from 2 kg of plastic. Therefore, the total weight will be even greater due to the weight of the motors and electronic parts.
The advanced, low-cost prosthetic arm developed by C. O’Neill weighs 960 g. This includes a socket, but excludes the haptic feedback sensors.[Citation6]
The weight of the prosthesis developed by Andrianesis et al. [Citation1] is 350 g, including a cosmetic glove, but excluding the 180-g battery.
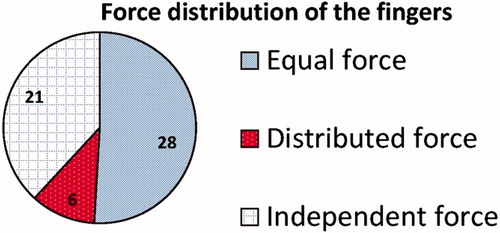
Force distribution
The various types of force distribution between the fingers of each hand are shown in . The total number of prostheses shown in this figure is 55. The three passive prostheses are excluded. The specifications related to force distribution between the fingers are specified for only a small portion of the hands. For the hands in which the force distribution was not specified, we determined the specifications based on videos and images. The force distribution between the fingers is equal for the majority of hands (28): when the hand is actuated, the force is equally distributed over the fingers. The minority of the prostheses (6) have fingers with force distribution over the fingers, which ensures an adaptive grasp. In these prostheses, the other fingers can still apply a force when some of the fingers are halted by an object. The remainder of the prostheses (21) have fingers with independent force, with one motor per finger. This also enables an adaptive grasp and enables a large variety grasp types.
Figure 5. More than half of the actuated hands have an equal force between the fingers. Slightly more than a third of the hands have fingers with independent force due to a separate motor for each finger. Only a small number of the hands have a mechanical linkage system to distribute the force along the fingers.
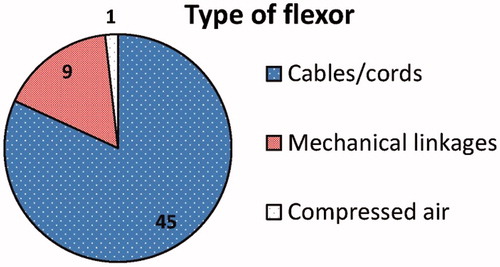
Type of flexor
The different types of flexors used to close the hand are shown in . All the body-powered prostheses found to make use of the voluntary closing principal. Voluntary closing devices close when they are actuated and return to their natural open position when the force is released. The majority of devices (45) use cables or non-elastic cords to close the hand. When flexing the wrist or elbow, the cables or cords attached to the end of the fingers ensure that they make a closing grasp. The remainder of the devices makes use of a mechanical solution without cables or cords. Nine hands use mechanical linkages controlled by motors, and one hand uses compressed air to close the fingers.[Citation44]
Figure 6. The type of flexor used to close the prosthesis. The majority of the hands use cables or cords to close the hand. The remainder of the hands use mechanical linkages and one uses compressed air.
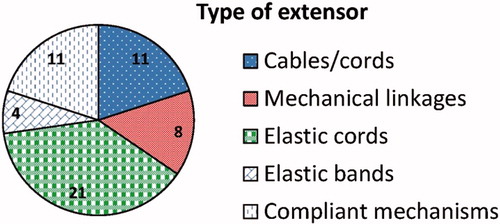
Type of extensor
shows the different solutions that are used to open the hand. A large number (36) of prostheses use elasticity to open the hand automatically. This is achieved through the use of elastic cords (21) and elastic bands (4), and a large number of devices use the elasticity of the finger joints (11) to open the hand. The elastic finger joints are called compliant mechanisms. Hands with these compliant mechanisms consist of fingers that are made from one piece where the phalanges are rigid and the joints are flexible. The remainder of the prostheses have cables or cords (11) or mechanical linkages (8), which are, in both, cases attached to motors.
Figure 7. The type of extensor used to open the prosthesis. Almost two-thirds of the hands use elasticity in the form of elastic cords or bands or compliant mechanisms to open the hand automatically.
Kinematic specifications
The kinematic specifications of each prosthesis are shown in . The table shows how many joints and degrees of freedom (DOF) a hand has, how many actuators it has, the range of motion of the different joints and the different grasp types a hand can perform. Most of the information in these tables has been estimated based on published images and videos, as it was not mentioned in the publications. For some hands, basic information related to the number of actuators or the DOF was specified. Only Andrianesis [Citation1] and Bahari [Citation2] described their hand in more detail and specified the numbers; the remaining hands lack information related to the kinematic specifications, e.g., DOF´s, ROM and possible grasp type.
Table 3. Kinematic specifications of the 3D-printed hand prostheses.
Number of joints, DOF and actuators
All the active hands are underactuated, which means that they have more DOF’s than actuators. This is due to the coupling of the phalanges in the fingers. Most of the fingers of the body-powered prostheses consist of three phalanges that are connected to each other with cables, cords and so on. The cables from all the separate fingers are then attached to one linkage, which ensures that the fingers all move at the same time. For externally powered prostheses, the phalanges are connected to each other with cables or mechanical linkages and are directly connected to motors. The motors control the fingers separately.
Range of motion
Each finger of a human hand has four joints. The carpometacarpal (CMC) joint, the metacarpo phalangeal (MCP) joint, the proximal interphalangeal (PIP) joint and the distal interphalangeal (DIP) joint.[Citation68] The thumb of a human hand only has three joints. It has no DIP joint, and instead of a PIP joint, it has an interphalangeal (IP) joint, which is described in the table as thumb flexion. The CMC joint of the thumb is also known as the trapeziometacarpal (TMC) joint. This joint is described in the table as thumb circumduction. None of the 3D-printed hands found have a CMC joint. Except for passive hands, all the hands have an MCP joint and a PIP joint. Only 31 of the 56 active hands have an active DIP joint.
Grasp type
An adaptive grip is the ability of the fingers to conform to the shape of an object held within the hand. In this case, the force is distributed between the fingers, which ensures that some fingers can still apply a force when the others fingers are halted by an object. This can be performed by 24 of the prostheses, of which 18 can do this by controlling the fingers separately by controlling the motors independently. The hand that is actuated with air pressure can perform an adaptive grip by controlling the pressure in the separate fingers with the use of valves. Only five prostheses have a smart mechanism that distributes the force over all of the fingers.
The power grip and precision grip are the two basic grasps a human uses.[Citation69] In addition to these basic grasps, there are four other common types of grasps that are used to perform activities of daily living (ADLs). These four types are the hook grip, spherical grip, tripod grip and lateral grip.[Citation70] All the active hands (56) can perform a power grip, and the majority (54) can also perform a lateral grip. The precision grip can only be performed by 24 of the hands. Almost one-quarter (14) of the hands can perform all six grasp types, which are, in most cases, electrically powered hands with an adaptive grip.
3D-printing technology used to print the upper limb prostheses
3D-printing technique
The information related to the 3D-printing technology used to print the prostheses is shown in . The various techniques that are used to print the prostheses are shown in . Most of the devices (46) are printed using fused deposition modelling (FDM) technology. The remaining prostheses are made using selective laser sintering (SLS) technology (6), selective stereolithography apparatus (SLA) technology (1), and polyjet printing (1), but in the case of four prostheses, the printing technique is unknown. FDM is the only technique that uses a continues filament to print the part. The other techniques make use of a powder or liquid bonded together with the use of a UV laser or UV light.
Figure 8. The various fabrication methods used to print the prostheses. The majority of the devices are made using FDM technology
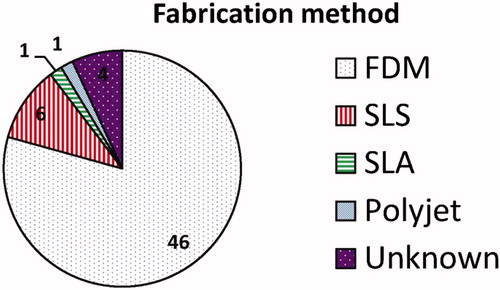
Table 4. Print specifications of the 3D-printed hand prostheses. The first part of the table shows the 3D-printed upper limb prostheses found in scientific literature and the second part of the table shows the devices found with the internet search.
3D-printing material
There is a large variety of materials that can be used for 3D-printing. Acrylonitrile butadiene styrene (ABS) and polylactic acid (PLA) are the most commonly used materials to print the prostheses. These are the most common materials used for printing with FDM, which is the most commonly used technique to print the devices. The prostheses that are made from flexible materials and FDM 3D-printing make use of NinjaFlex or Filaflex. The chemical name for NinjaFlex is thermoplastic polyurethane.[Citation71] Filaflex is a thermoplastic elastomer with a polyurethane base and some additives.[Citation72] Both these materials stay flexible after first being heated and then cooled down. The prostheses made using SLS 3D-printing are made from nylon. SLS 3D-printing most commonly uses standard nylon 11 or nylon 12. The prosthesis made using SLA 3D-printing is made of acrylic plastic, and the prosthesis made using polyjet 3D-printing is made from FullCure 720, which is a photopolymer resin. The Tenim Hand is the only prosthesis that consists of a non-plastic material. This device is made in multiple steps; first, a part from polystyrene is 3D-printed and is then covered with a ceramic layer. The polystyrene is then melted away leaving a cavity in the ceramic that is filled with nylon. This production method is known as the lost wax casting. Therefore, this prosthesis was made using 3D-printing only as a step in the production process.
Production cost
The cost of 20 prostheses is specified and ranges from $5 to $500. The prosthesis that is specified with the lowest cost of $5 only states the cost of the material that is used for the 3D-printing. The prosthesis that has the greatest specified cost of $500 states the cost of all the materials that are needed to manufacture the entire hand (e.g., cables, motors, electronics). There are no prostheses that can be bought off-the-shelf; however, there are some companies working on prostheses that could be sold for $1000; for example, You Bionic and Open Bionics are developing a prosthesis that they would like to sell for $3000.
Design availability
The designs of 31 of the 58 different printed prostheses are available online. Most of the designs can be found on www.thingiverse.com or www.instructables.com. People can download the CAD-model, print the model and, if necessary, modify the model.
Discussion
A prosthesis should meet the basic user demands to increase the usability of the prosthesis; these demands can be summarized as cosmesis, comfort, control and function.[Citation73] A prosthesis should be beautiful to look at, comfortable to wear, easy to operate and should have a functional use. A limitation of this study was that a great deal of information on the state of the art 3D-printed upper limb prostheses was found on public websites that are not peer-reviewed. However, we believe, in general, the obtained values appear to be in line with values from the literature.
Cosmesis of hand prostheses
After functional factors, the appearance is one of the most important factors in prosthesis rejection.[Citation74] To ensure that a prosthesis has an appealing look, the term anthropomorphic is used in the field of prosthetics. This term refers to the capability of a device to mimic the general aspects of the human hand, such as shape, size, colour, temperature and aesthetic factors.[Citation75] All the 3D-printed prostheses are designed to resemble the shape of a human hand, except some hands have a thumb that is positioned at 90° or even at 155° with respect to the fingers. The average size of a human hand has a length of 180–198 mm and a width of 75–90 mm.[Citation76] Only the prosthesis developed by Andrianesis specifies the exact dimensions of the prosthesis. The length of this hand is 174 mm and the width is 72 mm. This is slightly smaller than the size of an average human hand. The rest of the hands described in the literature and found on internet do not mention the size. They only mention that the size of the hand can be scaled to match the sound limb. However, this is not possible for hands that are controlled by the wrist. These prostheses are fitted to the residual limb, which results in a bigger hand than the sound hand. The majority of the hands have a brightly coloured appearance. Whereas adults appreciate more skin-coloured prostheses,[Citation77] children may appreciate a coloured appearance.[Citation78] The prostheses developed for adults primarily have a skin colour appearance. Most of the existing conventional prostheses are covered with a cosmetic glove that has a skin-coloured look. Currently, two types of cosmetic gloves are available: a polyvinylchloride (PVC) glove and a silicone glove.[Citation79] The main function of a cosmetic glove is to cover the mechanism and provide the prosthesis with a natural appearance. In addition to this main function, the glove also protects the mechanism against moisture and dirt. A negative effect of a cosmetic glove is that it results in a greater operational force due to the stiffness of the material. As an extra part for a prosthesis, the glove results in extra costs. None of the 3D-printed hands used a standard glove to cover the mechanism. They are not designed in such a way that a cosmetic glove can cover the mechanism. Only the hand developed by Andrianesis uses a custom fabricated silicone glove. As stated previously, the majority of the hands have a colour that does not look like human skin. These prostheses can also be printed using a filament that has a skin colour to give them a skin-like appearance. The Flexy Hand 2 and the Flexy Hand-Filaflex remix are both made using a skin-coloured filament. Protecting the mechanism from moisture and dirt is one of the advantages of a glove. The disadvantages of a glove are the greater operation force required and the additional cost.[Citation79] Printing a prosthesis with skin-coloured appearance results no greater operational force needed and no extra cost required to cover the mechanism to give the hand a natural appearance. More than one third of the hands are electrically powered in most cases with a servo motor. This results in a noise that can be an undesired aspect of electrically powered hands. Although all prostheses were designed in the shape of a human hand and the majority of the hands can be scaled to the size of the sound hand, most of them still have a non-anthropomorphic look. The appearance of most of the hands is not similar to the appearance of the sound hand. The majority of the hands look more like a mechanical hand than a cosmetic hand, which might result in a greater prosthesis rejection rate.
Comfort of hand prostheses
A comfortable prosthesis has a good fit and weight that satisfies the user. Almost half of the hands are fitted to the residual limb and tightened using Velcro. The remaining hands can be connected to an existing socket. In the Internet and literature search, the prostheses were found to be easily fitted on the residual limb or connected to an existing socket. No information is published on tests or research that has measured the comfort of these prostheses, and current evidence is mainly anecdotal. The human hand has an average weight of 400 ± 90 g [Citation80] (distal to the wrist and not including the forearm extrinsic muscles). Excessive weight is one of the most important causes of prostheses rejection.[Citation81] Therefore, it is important to provide the weight specifications of the hand prostheses. For 11 devices, the weight of the hand and part of the arm is specified. For four devices, the weight of only the hand is specified:
Groenewegen’s hand: 71 g
Dextrus EMG: 450 g
InMoov 2 hand: 450 g
Tact: 350 g
Groenewegen’s hand is extremely light. All the parts for this hand are printed using SLS 3D-printing and are optimized for weight reduction. The other three hands have a comparable weight as the human hand. Comparing the weight of the other seven prostheses shows that six of the prostheses have a similar weight or even a lower weight as similar human arm parts. Only the Cyborg beast has a greater weight than the human body part it replaces. The Cyborg beast is a partial hand prosthesis that replaces the fingers but consists of fingers, a support mechanism and a support to be mounted onto the human hand. The weight of the other partial hand prostheses will probably be greater than the human body part it replaces as well because they are designed in the same way as the Cyborg beast. Although the prostheses that specify a weight have a comparable or slightly lower weight as the human body part it replaces, they are still heavier than some of the commercial available body powered prosthesis.[Citation82] Additionally, it is preferred to have prosthesis that is considerably lighter than 400 ± 90 g.[Citation83] This preferred weight is highly related to the length of the stump. For partial hand prostheses, the weights are greater than the human body part it replaces. To increase the comfort of 3D-printed upper lump prosthesis, it is important that specifications related to weight and fitting of future prostheses are provided.
Hand prostheses control
Almost 64% of the hands (37) are developed for people with an amputation level below elbow and 31% of the hands (18) are developed for people with a partial hand amputation level. The remaining hands (3) are developed for people with an amputation level above the elbow. This is remarkable as we compare it to numbers for amputation levels in the USA.[Citation84] The literature shows that approximately 25% have an above elbow amputation level, whereas only three 3D-printed hand prostheses have been developed for this purpose. For partial hand amputation, the literature indicates that these procedures are less than 10%, whereas 31% of the 3D-printed hand prostheses are developed for a partial hand amputation level. The exact numbers for the percentages of passive, body-powered and externally powered prosthesis users are unknown.[Citation81] In general, still a remarkable number of people use a passive cosmetic prosthesis,[Citation85] whereas only two of the 58 3D-printed hand prostheses are passive prostheses. With respect to the type of actuation for the 3D-printed upper limb prostheses, three of the prostheses are passive, 32 of the prostheses are body-powered and 23 are externally powered. Therefore, the focus of 3D-printed upper limb prostheses is more on body-powered and externally powered than on passive prostheses. Almost 30% of the hands (17) have been developed for people with partial hand loss. These prostheses are body powered and can only be controlled by the wrist. The prostheses developed for all other levels of amputation have a large variety in their type of actuation and type of control.
Hand prostheses function
The total active range of motion of a human finger is 260°, which is the sum of active flexion at the MCP joint (85°), the PIP joint (110°) and the DIP joint (65°).[Citation68] A little more than one-third of the hands (20) have this range of motion as well. The range of motion of the thumb is very important when performing precision grasp. The thumb circumduction ensures this grasp. Less than half of the hands (20) enable active thumb circumduction. More than a third of the hands (24) can perform adaptive grasp. Only five of the hands have a smart mechanism to enable adaptive grasp. The remainder of the hands, which can perform an adaptive grasp, does this by controlling each finger independently with a separate motor. Using a smart mechanism instead of using multiple motors can lead to significant weight reduction.[Citation86] Although the power grip and precision grip are the most important types of grip in daily life, only 24 of the hands can perform these two types of grip. However, almost all the hands can perform a power grip and a lateral grip. Future hands should focus more on the most important grasp types used in daily live. This can increase the amount of ADLs a person can perform.
The most important aspect of a hand is the ability to perform a secure grip, which is a combination of a grasp type and an applied force. It is only possible to predict the usability of a hand related to tasks if the forces of the hand are specified. Whereas the forces are very important, the forces are only specified from one hand. The Andrianesis’ hand can provide fingertip forces of 3.9–11.5 N and has a maximum grip load of 1.5 kg. The fingertip force of a human hand is 30 N.[Citation87] Although the fingertip forces of the Andrianesis’ hand are relatively low compared with a human hand, it is still sufficient for most ADLs.[Citation68] There are no specifications provided, such as the actuation force, maximum grip force or maximum load, for the remainder of the hands. Future upper limb prostheses should be tested, and the results should be provided to inform people about the specifications of a hand and to compare the new hand to current hands.[Citation82] Future research should be more focused on providing the specifications of 3D-printed hand prostheses, e.g., the actuation force, maximal grip force, weight, battery life and durability, to allow for better selection between the hands.
3D-printing technology used to print the upper limb prostheses
Every 3D-printing technique has it benefits and drawbacks. These are related to the accuracy of the printing process, possibility of printing different materials and the cost of printing.
3D-printing technique
The majority of the hands (46) are made using the FDM 3D-printing technique. This technique is the primary technique used worldwide because it uses a relatively cheap printer and is an easy process. A variety of materials can be used, and in most cases, post processing is not required. The downside of FDM is the fact that very small details are difficult to make. FDM has the greatest layer height of all techniques used to print all prostheses, namely approximately 0.15 mm, which results in a rough surface. If overhanging structures need to be made, FDM printing requires support material, which then has to be subsequently removed. SLS is a technique that uses a much more expensive printer but provides a designer with more freedom with respect to shape. A printed part is build up layer by layer by melting powder using a UV laser. The non-melted powder acts as a support material for overhanging structures. The prostheses that are made using SLS printing have a more free form shape compared with the hands that are printed with the use of FDM printing. Smaller details can be printed using SLS compared with FDM because SLS has a lower minimal layer height, namely approximately 100 μm, resulting in a smoother surface compared with FDM. SLS printing does not necessarily require post-processing but results in a slightly rough surface. This can be smoothened by polishing or adding a coating. Both SLA and Polyjet printing have the advantage of more design freedom and can print very small details. Both have a very small minimal layer height of approximately 16 μm. The downside of these techniques is that they both need post processing to remove support material, and the material can degrade over time as the photopolymers degrade due to exposure to sunlight.[Citation88] The prostheses made with FDM printing can be printed using a low cost home 3D-printer with a typical cost of approximately $2000. Prostheses made with SLS, SLA and Polyjet printing are printed using a more expensive industrial printer, especially the SLS and Polyjet printers. SLA printers cost approximately $5000, whereas the cost of SLS and Polyjet printers can range from $50,000 to $100,000.
Most of the hands do not require small details, which makes FDM printing a suitable technique. Cheap and simple prostheses can be made with the use of this technique. However, due to the limitations of this printing technique, it is difficult to print complex geometries. SLS, SLA and Polyjet printing can be used to print more complex shapes but are more expensive printing process. Moreover, parts made with SLA and Polyjet degrade over time and require post processing to remove the support material,[Citation89] so these techniques are not often used in the development of 3D-printed hand prostheses.
3D-printing material
The majority of the hands are made of ABS and PLA, which are the standard materials used for FDM printing. The materials result in strong parts that barely change with respect to mechanical characteristics over time. Although these rigid parts create a strong hand, the surface of the hand is not compliant. A human hand uses the compliancy of the skin to achieve good grip. The new materials NinjaFlex and Filaflex could be a possible solution to print soft parts as well. A mixture of rigid parts and flexible parts can be used to make a strong prosthesis with a good grip. These flexible materials can be used as printing material for an FDM printer, but some printers have to be adjusted to make sure that the material will not clog the machines.[Citation90] Currently, companies are beginning to develop FDM printers that can extrude multiple materials at the same time,[Citation91,Citation92] which could be a big improvement for hands made using FDM technique. A combination of rigid and flexible parts can also be made using Polyjet printing. This duality gives the advantage of printing a combination of different materials in one part. Although only nylon is used to print the devices that are printed with SLS, many materials can be used for printing with SLS even flexible materials. This is also possible for printing with SLA: both rigid and flexible materials can be printed but not at the same time. Most of the hands are made of a rigid material, whereas a combination of rigid and flexible material could improve performance of the hands enabling the addition of a compliant top layer.
Production cost
The prices from only a small number of hands are known. These prices are only the material costs, which are at maximum $500. These costs are hard to compare with the prices from commercially available non-3D-printed upper limb prostheses because these prices consist of more than only the material costs. There are two companies who want to sell their prosthesis as a commercial product. Youbionic [Citation65] is aiming for a price of $1000 and Open Bionics [Citation40] is aiming for a price of $3000 for their latest developed Bionic Arm. These hands are both myo-electric hands. Comparing these prices with the commercially available myo-electric hands priced at $25,000 to $75,000, there is a large difference. The developing of cheap hand prostheses can especially be a significant benefit for child prostheses. Children need to change their hand prosthesis quite often due to their growth. By 3D-printing a cheap prosthesis every time, there is no need to purchase an expensive prosthesis regularly. A prosthesis can be scaled to the right size and 3D-printed easily. Although the material costs of 3D-printed hand prostheses can be very low, it is also possible to produce non 3D-printed hand prostheses with a very low material cost. An example of this is the LN-4 Hand.[Citation93] This prosthesis is made by injection moulding six parts with a total production cost of $50. It can be moulded in six minutes. One should be careful in saying that 3D-printed hand prostheses are cheap because the 3D-printer can be expensive by itself. The time and effort of a designer are not included, and 3D-printing is a time consuming production process.
Design availability
More than half of the 3D-printed upper limb prostheses designs are 'open source' and are available online. Anyone can download a design, criticize and improve the design and post his/her own version of the hand. This can lead to improvements in some hands, as seen in the overview. In the case of some hands, there are already second versions, and there have been some new hands developed based on previous designs. This can lead to fast and cheap improvements in the hands. However, not every 3D-printed prosthesis designer is a prosthetists, and it is very important that the specific needs of the prosthesis user are taken into account.
Prosthesis durability
3D-printing has improved rapidly over the last decade with respect to the design of end-use parts, but when evaluating the 3D-printed upper limb prostheses made currently, they still look like prototype parts. With respect to the durability of the parts, no tests have been carried out to predict the life cycle of the printed parts. No publication mentioned how long a hand could be worn without requiring repair. It was mostly stated that broken parts can easily be replaced by printing new parts.[Citation94] Although most of the hands are printed with the use of FDM printers, it is not always possible to easily print new parts. First, the hands that are not made using FDM printers require parts printed with another technique, which results in more expensive parts or an increased amount of time to obtain the parts. Second, the majority of the devices are not printed by the prosthesis user, so the person cannot directly print new parts without contacting a person with a printer. This can result in an unwanted situation where the prostheses cannot be fixed fast enough, which can then result in user not being able to use the prosthesis at all.
Material strength is also an important point to consider. No predictions have been made by the developers of the 3D-printed hands with respect to the strength of the parts of the printed prostheses. This is important because 3D-printing affects the properties of the material. For FDM printing, the material properties of the printed part are not the same as those of the bulk material.[Citation95] For SLS and Polyjet printing, material degradation influences the material properties of the part. Little research has been conducted on current 3D-printed hand prostheses related to material degradation. Some materials degrade over time, especially devices that are made with a photopolymer.[Citation88] Material degradation of the parts will reduce the strength and stiffness of the parts. Further research should be performed on the strength and durability of 3D-printed parts to ensure that future printed hand prostheses require little maintenance and can be worn for a long time.
Benefits and drawbacks of 3D-printing
3D-printing provides promising possibilities to produce complex geometries and custom and personalized designs combined with an ease of manufacturing. However, the mechanical properties, accuracy and the costs have to be taken into account. Plastic parts can be produced cheaper and faster using injection moulding than with 3D-printing, but 3D-printing has the advantage that parts can be easily personalized and customized. 3D-printing has the advantage of being able to produce a custom design without the need to change the production machine. Every prosthesis user has his/her specific needs (e.g., specific tasks a person performs in daily life and the specific fitting to the residual limb). 3D-printing provides the promise of easily producing a personalized socket, printing the prosthesis in the preferred colour, printing a custom shape and size and a design that can be adapted to the needs of the prosthesis user.
Conclusions
This study provides an overview of 58 3D-printed upper limb prostheses that were constructed as part of research, individual projects or worldwide community projects. A large range of different prostheses have been 3D-printed, of which the majority are used by children. Media show children who are happy with their prosthesis, but it remains unclear whether the prosthesis meets the needs of the child. No evidence of short- or long-term use is available. The use could be increased if the 3D-printed upper limb prostheses have greater functionality and a more anthropomorphic appearance. Very little information was found regarding the mechanical specifications of the current hands. Additionally, evidence on the user acceptance, functionality and durability of the 3D-printed hands is lacking. Current evidence is primarily anecdotal. Contrary to media claims, 3D-printed hand prostheses are not always cheap. The material costs are generally cheap, but development, including designing, assembling and fitting the prostheses, has to be taken into account as well. Injection moulding can produce parts much cheaper. Conversely, 3D-printing provides the promising possibility of individualization, e.g., personalized design of the socket, colour, shape and size, without the need to adjust the production machine.
Acknowledgements
The authors would like to thank Maurice LeBlanc for proofreading and checking the manuscript for grammatical errors.
Disclosure statement
The authors report no declarations of interest.
References
- Andrianesis K, Tzes A. Development and control of a multifunctional prosthetic hand with shape memory alloy actuators. J Intell Robot Syst 2014;78:257–289
- Bahari MS, Jaffar A, Low CY, et al. Design and development of a multifingered prosthetic hand. Int J Soc Robot. 2012;4:59–66.
- Laliberte T, Baril M, Guay F, et al. Towards the design of a prosthetic underactuated hand. Mech Sci. 2010;1:19–26.
- Gretsch KF, Lather HD, Peddada KV, et al. Development of novel 3D-printed robotic prosthetic for transradial amputees. Prosthet Orthotics Int. 2015;40:400–403. 0309364615579317.
- Groenewegen MWM. Design of a compliant, multi-phalanx underactuated prosthetic finger [Master Thesis]. Delft: Delft University of Technology; 2014.
- O’Neill C. An advanced, low cost prosthetic arm. In: SENSORS, 2014 IEEE. New York: IEEE; 2014.
- Simone F, York A, Seelecke S. Design and fabrication of a three-finger prosthetic hand using SMA muscle wires. In: SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring. International Society for Optics and Photonics; 2015.
- Enabling The Future [Online]. [cited 2015 Jun 19]. Available from: http://enablingthefuture.org/
- Robohand [Online]. [cited 2015 Jun 4]. Available from: http://www.robohand.net/wp-content/uploads/2013/03/2013-03-29-11-10-58-b.jpg
- Resnik L, Meucci MR, Lieberman-Klinger S, et al. Advanced upper limb prosthetic devices: implications for upper limb prosthetic rehabilitation. Arch Phys Med Rehabil. 2012;93:710–717.
- van der Riet D, Stopforth R, Bright G, Diegel O. An overview and comparison of upper limb prosthetics. In: AFRICON, 2013. New York: IEEE; 2013.
- Campbell T, Williams C, Ivanova O, Garrett B. Could 3D printing change the world. In: Technologies, potential, and implications of additive manufacturing. Washington, DC: Atlantic Council; 2011.
- Doubrovski Z, Verlinden JC, Geraedts JMP. Optimal design for additive manufacturing: opportunities and challenges. In: ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. American Society of Mechanical Engineers; 2011.
- Gibson I, Dongping S. Material properties and fabrication parameters in selective laser sintering process. Rapid Prototyping J. 1997;3:129–136.
- Zhou JG, Herscovici D, Chen CC. Parametric process optimization to improve the accuracy of rapid prototyped stereolithography parts. Int J Mach Tools and Manufacture. 2000;40:363–379.
- 3D-printed prosthesis Ecuador [Internet]. [cited 2015 Jun 25]. Available from: http://www.gizmag.com/3d-printed-prosthetic-hand/34615/
- Zuniga J. Adjustable Thumb [Internet]. [cited 2015 Jun 22]. Available from: http://www.cyborgbeast.org/devices/
- Biohand [Internet]. [cited 2015 Jun 30]. Available from: https://hackaday.io/post/19887
- Bionico hand [Internet]. [cited 2015 Jun 29]. Available from: http://bionico.org/about/
- Zuniga J. Cyborg Arm [Internet]. [cited 2015 Jun 22]. Available from: http://www.cyborgbeast.org/devices/
- Zuniga J. Cyborg Beast [Internet]; 2014 Mar 2. [cited 2015 Jun 22]. Available from: http://www.thingiverse.com/thing:261462
- Zuniga J. Cyborg Beast with Increased Wrist Movement [Internet]. [cited 2015 Jun 22]. Available from: http://www.cyborgbeast.org/devices/
- Open Bionics. Dextrus EMG [Internet]; 2014 Apr 2. [cited 2015 Jun 22]. Available from: http://www.thingiverse.com/thing:287638
- Patrick S. DIY Prosthetic Hand & Forearm [Internet]; 2013 Aug 16. [cited 2015 Jun 25]. Available from: http://www.instructables.com/id/Voice-Controlled-Prosthetic-Hand-Forearm/
- Estep B. Falcon Hand V1 [Internet]; 2014 Aug 5. [cited 2015 Jun 25]. Available from: http://www.thingiverse.com/thing:418398
- Arabian A. Falcon Hand V2 [Internet]; 2014 Dec 20. [cited 2015 Jun 27]. Available from: http://www.thingiverse.com/thing:603039
- Silva C. Flexy Arm [Internet]; 2014 Jun 23. Available from: http://www.thingiverse.com/thing:894705
- Wood S. Flexy-Hand [Internet]; 2014 Mar 4. [cited 2015 Jun 20]. Available from: http://www.thingiverse.com/thing:242639
- Wood S. Flexy-Hand 2 [Internet]; 2014 Jul 3. [cited 2015 Jun 20]. Available from: http://www.thingiverse.com/thing:380665
- Wood S. Flexy-Hand – Filaflex Remix [Internet]; 2014 Apr 10. [cited 2015 Jun 20]. Available from: http://www.thingiverse.com/thing:754513
- Dlacrur. GalileoHand [Internet]; 2015 Feb 12. [cited 2015 Jun 26]. Available from: http://www.thingiverse.com/thing:655432
- HACKberry [Internet]. [cited 2015 Jun 25]. Available from: http://exiii.jp/hackberry.html, https://github.com/exiii/HACKberry
- Handiii [Internet]. [cited 2015 Jun 25]. Available from: http://exiii.jp/handiii-eng.html
- Handiii COYOTE [Internet]. [cited 2015 Jun 25]. Available from: http://exiii.jp/coyote-eng.html
- Chappell C. Hollies Hand [Internet]; 2015 Feb 24. [cited 2015 Jun 28]. Available from: http://www.thingiverse.com/thing:696343
- Langevin G. InMoov 2 hand [Internet]; 2013 Jul 14. [cited 2015 Jun 28]. Available from: http://www.thingiverse.com/thing:118031
- Alec. IVIANA 2.0 [Internet]; 2014 Aug 27. [cited 2015 Jun 24]. Available from: http://tiny.cc/lz1b3x
- JD-1 [Internet]. [cited 2015 Jun 25]. Available from: http://tiny.cc/pyzd3x
- K-1 [Internet]. [cited 2015 Jun 24]. Available from: http://3dprint.com/72594/3d-systems-e-nable-k-1-hand/
- Latest Bionic arm [Internet]. [cited 2015 Jun 24]. Available from: http://www.openbionics.com/
- UCFArmory. Limbitless Arm [Internet]; 2014 Jul 29. [cited 2015 Jun 29]. Available from: http://www.thingiverse.com/thing:408641
- Manu Print (Re Hand) [Internet]. [cited 2015 Jun 24]. Available from: http://tinyurl.com/oeb2cd5
- Kirshna L. Mind Controlled Robotic Hand [Internet]; 2014 May 11. [cited 2015 Jun 26]. Available from: http://www.instructables.com/id/Mind-Controlled-Robotic-Arm/
- Mikey77. Muscle Robot Hand [Internet]; 2014 Apr 24. [cited 2015 Jun 26]. Available from: http://www.instructables.com/id/3d-Print-An-Artificial-Muscle-Robot-Hand/
- Not Impossible [Internet]. [cited 2015 Jun 24]. Available from: http://notimpossible.com/
- NuHand [Internet]. [cited 2015 Jun 29]. Available from: http://tiny.cc/5y2d3x
- Profbink. Odysseus Hand [Internet]; 2014 Mar 4. [cited 2015 Jun 29]. Available from: http://www.thingiverse.com/thing:262930
- Zuniga J. One-hinged Cyborg Beast [Internet]. [cited 2015 Jun 22]. Available from: http://www.cyborgbeast.org/devices/
- H, Dietz. Prosthetic/Robotic Hand Printable As An Assembled Unit Without Supports [Internet]; 2013 Oct 1. [cited 2015 Jun 29]. Available from: http://www.thingiverse.com/thing:158843
- Grunewald SJ. Prótesis Cosmética [Internet]; 2015 May 20. [cited 2015 Jun 27]. Available from: http://3dprint.com/66483/cocreate3d-stylish-prosthetics/
- E-Nable. Raptor Hand [Internet]; 2014 Sep 29. [cited 2015 Jun 22]. Available from: http://www.thingiverse.com/thing:476403
- E-Nable. Raptor Reloaded [Internet]; 2014 Dec 17. [cited 2015 Jun 22]. Available from: http://www.thingiverse.com/thing:596966
- E-Nable. RIT Arm [Internet]; 2014 Jul 30. [cited 2015 Jun 22]. Available from: https://www.youmagine.com/designs/rit-e-nable-arm-v0-43
- Roboarm (Unlimited tomorrow) [Internet]. [cited 2015 Jun 24]. Available from: http://theroboarm.com/
- Robohand. Robohand [Internet]; 2014 Apr 21. Available from: http://www.thingiverse.com/thing:305160
- Andrade M. Robot Hand [Internet]; 2013 Oct 26. [cited 2015 Jun 26]. Available from: http://www.thingiverse.com/thing:171898
- Allen S. Scand [Internet]. [cited 2015 Jun 26]; 2014 Jun 15. Available from: http://www.instructables.com/id/3D-Printing-Prosthetic-Hand-Make-it-Real-Challen/
- MakerBot. Snap-Together Robohand [Internet]; 2013 Jul 19. [cited 2015 Jun 22]. Available from: http://www.thingiverse.com/thing:92937
- Patrick S. Tact [Internet]; 2015 May 10. [cited 2015 Jun 25]. Available from: http://www.instructables.com/id/Tact-Low-cost-Advanced-Prosthetic-Hand/
- Profbink Talon Flextensor 1.0 [Internet]; 2014 Aug 1. [cited 2015 Jun 26]. Available from: http://www.thingiverse.com/thing:413983
- Profbink. Talon Hand 2.0 [Internet]; 2014 Jan 19. [cited 2015 Jun 26]. Available from: http://www.thingiverse.com/thing:229620
- Tenim Hand [Internet]. [cited 2015 Jun 29]. Available from: http://3dprint.com/73999/tenim-mechanical-hand/
- Thomas A. The Lucky Paw Prosthetic Hand [Internet]; 2014 Jun 24. [cited 2015 Jun 27]. Available from: http://www.thingiverse.com/thing:372727
- Victory Hand [Internet]. [cited 2015 Jun 25]. Available from: http://www.victoriahandproject.com/
- Youbionic [Internet]. [cited 2015 Jun 29]. Available from: www.youbionic.com/
- Zero Point Frontiers [Internet]. [cited 2015 Jun 24]. Available from: http://tiny.cc/miyd3x
- Zuniga J, Katsavelis D, Peck J, et al. Cyborg beast: a low-cost 3d-printed prosthetic hand for children with upper-limb differences. BMC Res Notes. 2015;8:10.
- Jones LA, Lederman SJ. Human hand function. New York: Oxford University Press, Inc.; 2006.
- Napier JR. The prehensile movements of the human hand. J Bone Joint Surg. 1956;38:902–913.
- Weir RF, Sensinger JW. Design of artificial arms and hands for prosthetic applications. In: Standard Handbook of Biomedical Engineering and Design; 2003. p. 32-1.
- NinjaFlex: Flexible 3D-Printing with Strong Flexible Filament [Internet]. [cited 2015 Sep 14]. Available from: http://www.ninjaflex3d.com/
- Filament Filaflex [Internet]. [cited 2015 Sep 14]. Available from: http://recreus.com/en/4filaflex-filaments
- Plettenburg DH. Basic requirements for upper extremity prostheses: The Wilmer approach. In: Engineering in Medicine and Biology Society, 1998. Proceedings of the 20th Annual International Conference of the IEEE. Vol. 5. New York: IEEE; 1998.
- Biddiss E, Chau T. Upper-limb prosthetics: critical factors in device abandonment. Am J Phys Med Rehabil. 2007;86:977–987.
- Gama Melo EN, Avilés Sánchez OF, Amaya Hurtado D. Anthropomorphic robotic hands: a review. In: Ingeniera Y Desarrollo. 2014. p. 279–313.
- Touch Bionics I-Limb Hand User Manual March 2010. [cited 2015 Jul 5]. Available from: http://www.touchbionics.com/docLibrary/US%20iLIMB%20user%20manual%20mar%202010.pdf
- Melendez D, LeBlanc M. Survey of arm amputees not wearing prostheses: implications for research and service. J Assoc Child Prosthetic Orthotic Clinic. 1988;23:62–69.
- Plettenburg DH. The Wilmer appealing prehensor. JPO: J Prosthet Orthotics. 2006;18:43–45.
- Smit G, Plettenburg DH. Comparison of mechanical properties of silicone and PVC (polyvinylchloride) cosmetic gloves for articulating hand prostheses. JRRD: J Rehabil Res Dev. 2013;50:723–732.
- Chandler RF, Clauser CE, McConville JT, et al. (1975) Investigation of inertial properties of the human body. No. AMRL-TR-74-137. Air Force Aerospace Medical Research Lab, Wright–Patterson Afb, OH.
- Biddiss EA, Chau TT. Upper limb prosthesis use and abandonment: a survey of the last 25 years. Prosthet Orthotics Int. 2007;31:236–257.
- Smit G, Plettenburg DH. Efficiency of voluntary closing hand and hook prostheses. Prosthet Orthotics Int. 2010;34:411–427.
- Fishman S, Berger N. The choice of terminal devices. Artif Limbs. 1955;2:66–77.
- LeBlanc M. Patient Population and Other Estimates of Prosthetics and Orthotics in the USA. Orthot Prosthet; 1973;27:38–44.
- Kyberd PJ, Hill W. Survey of upper-extremity prosthesis users in Sweden and the United Kingdom. JPO: J Prosthet Orthotics. 2007;19:55–62.
- Smit G. Natural grasping, design and evaluation of a voluntary closing adaptive hand prosthesis [dissertion]. Delft: Delft University of Technology; 2013.
- Shima K, Tamura Y, Tsuji T, et al. Estimation of human finger tapping forces based on a fingerpad-stiffness model. In: Engineering in Medicine and Biology Society, 2009. EMBC 2009. Annual International Conference of the IEEE. New York: IEEE; 2009.
- Pandey R. Photopolymers in 3D printing applications [Thesis]. Helsinki: Arcada University of Applied Sciences; 2014.
- Photopolymer Jetting (PJ) [Internet]. [cited 2016 Jan 22]. Available from: https://www.additively.com/en/learn-about/photopolymer-jetting
- Wood S. How to 3D print with Flexible Filament [Internet]; 2014 Dec 10. [cited 2016 Jan 25]. Available from: http://www.gyrobot.co.uk/blog/how-to-3d-print-with-flexible-filaments
- Leapfrog Creatr HS 3D Printer [Internet]. [cited 2016 Apr 4]. Available from: http://www.leapfrog.com/en/creatr-hs
- Ultimaker Dual Extrusion [Internet]. [cited 2016 Apr 4]. Available from: http://wiki.ultimaker.com/Dual_Extrusion
- LN-4 Hand [Internet]. [cited 2016 Mar 19]. Available from: http://www.ln-4.org
- Enabling the Future: Media FAG. [Internet]. [cited 2016 Jan 24]. Available from: http://enablingthefuture.org/faqs/media-faq
- Floor JW. Getting a grip on the Ultimaker 2. Tensile strength of 3D printed PLA: a systematic investigation [dissertation]. TU Delft: Delft University of Technology; 2015.