
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Hyperspectral images carry numerous spectral bands, and their wealth of band data is a valuable source of information for the accurate classification of ground objects. Three-dimensional (3D) convolution, although an excellent spectral information extraction method, is limited by its huge number of parameters and long model training time. To allow better integration of 3D convolution with the most popular transformer models currently available, a new architecture called mobile 3D convolutional vision transformer (MDvT) is proposed. The MDvT introduces inverted residual structure to reduce the number of model parameters and balance the data mining efficiency of low-dimensional data input. Simultaneously, a square patch is used to cut the sequence of tokens to accelerate the model operation. Through extensive experiments, we evaluated the classification overall performance of the proposed MDvT on the WHU-Hi and Pavia University datasets, and demonstrated significant improvements in classification accuracy and model runtime compared with classical deep learning models. It is worth noting that compared with directly integrating 3D convolution into the transformer model, the MDvT architecture improves the accuracy while reducing the time to train an epoch by approximately 58.54%. To facilitate the reproduction of the work in this paper, the model code is available at https://github.com/gloryofroad/MDvT.
1. Introduction
Hyperspectral images (HSI) have a wide range of spectral responses and high spectra resolution, and can represent both spatial and spectral information (Fauvel et al. Citation2013). Each pixel of a HSI contains spectral information in hundreds of bands, allowing for the identification of subtle gaps between categories, and the performance of higher-level observation tasks (Hong et al. Citation2021). Such tasks include geological mapping, tree species classification, fine land cover classification, and environmental monitoring (Adam, Mutanga, and Rugege Citation2010; van der Meer et al. Citation2012; Dalponte et al. Citation2013; Vali, Comai, and Matteucci Citation2020; Lassalle Citation2021; Russwurm and Korner Citation2020). However, as the number of spectral dimensions increases, the issues of rising data volume, and low computational performance are encountered while attempting to increase the accuracy of ground feature recognition (Zhang, Zhao, and Zhang Citation2020). To solve these problems, the key of HSI classification is to explore processing frameworks that extract features accurately and efficiently.
The traditional HSI classification method is limited by the production of feature engineering (Yuan, Lin, and Wang Citation2016; Wang, Lin, and Yuan Citation2016), in which classifiers, including Support Vector Machine (SVM) (Melgani and Bruzzone Citation2004) and Random Forest (RF) (Gislason, Benediktsson, and Sveinsson Citation2006), require substantial manual feature information selection in the pre-classification stage. Owing to the variability of spectral features in different geographical spaces, it is challenging to find a general approach for extracting feature engineering. As computing power has increased, researchers have introduced deep learning models to HSI classification, which has greatly improved the efficiency of feature extraction.
Deep learning approaches mainly consist of multiple hidden layers, and different feature layers learn different data features to obtain deep abstract information (Mou, Ghamisi, and Zhu Citation2017). Among them, Convolutional neural networks (CNNs) have been extensively employed for HSI classification as hierarchical spatial and spectral feature representation learning methods (Yue et al. Citation2015; Paoletti et al. Citation2018; Yu, Jia, and Xu Citation2017; He, Chen, and Lin Citation2021), substantially improving accuracy compared with traditional machine learning methods. Inspired by the development of advanced modules, a large number of studies have used CNNs as a basic classification skeleton, incorporating the latest modules to enhance the extraction of spatial-spectral information. For example, related studies have used attention mechanisms to combine spatial-spectral information, utilizing all available local and global information to interpret complex natural scenes (Li et al. Citation2021; Zhao et al. Citation2018). The residual module has been used to increase the depth of the network (Lee and Kwon Citation2017; Lim et al. Citation2017), and avoid gradient explosion or the disappearance of deep convolution. Meanwhile, multi-scale convolution kernels have been used to jointly and adaptively learn spatial contextual information (Li et al. Citation2022). Although these networks have achieved promising classification results, the convolution operation in the two-dimensional (2D) CNN model in the HSI classification task corrupts the continuity of information between the bands, which affects the efficiency of spectral dimension information acquisition (Zhang, Zhao, and Zhang Citation2020). A 3D convolution kernel can move along the spectral dimension, which can ensure that the original spectral information is retained in the next layer; hence, 3D convolution operation under the same conditions often performs better than 2D convolution (Chen et al. Citation2016; Mayra et al. Citation2021). However, the input of the 3D convolution operation introduces a spectral dimension, which greatly increases the burden on the computer. In addition, CNN is not good at global long-dependent information mining owing to its inherent local information extraction characteristics.
To address the limitations of the above model, the HSI classification task is here reconsidered from the perspective of sequence data using a vision transformer (ViT) (Hong et al. Citation2022), which is currently the most popular method in the computer vision (CV) field (Dosovitskiy et al. Citation2020). The ViT method has achieved similar success to CNN in the CV field using only the self-attention mechanism. As a new backbone network, ViT performs excellently in solving long-term dependency problems and global feature extraction (Bazi et al. Citation2021). However, ViT lacks some of the inductive biases inherent to CNNs, such as translational equivalence and locality (Yang et al. Citation2019; Wu et al. Citation2020). Therefore, it does not generalize well when training with insufficient data. Swin Transformer (Liu et al. Citation2021) is based on ViT and uses a hierarchical construction method similar to CNN, fusing information from different feature maps while also adding sliding windows so that information can be passed between adjacent windows. Tokens-to-Token (T2T) (Yuan et al. Citation2021) proposes a progressive tokenization module to integrate adjacent tokens, which not only models local information, but also reduces the length of token sequences. The information extraction methods based on ViT and CNN models are different, and many scholars have tried to integrate the advantages of each model. The convolutional vision transformer (CvT) removes positional embedding, uses convolutional layers to expand the local perceptual field, and uses down-sampling operations to decrease the number of parameters in the model, further improving the performance and robustness of ViT (Wu et al. Citation2021). The structure of the pyramid vision transformer (PvT) is roughly similar to that of the CvT in that it controls the size of patches through a linear layer to obtain the number of features in the next layer (Wang et al. Citation2021). The conformer model designs a two-branch structure of CNN and transformer, using a feature coupling unit (FCU) to exchange information between the two branches and obtain two classification results; the output is then averaged to make the final prediction (Peng et al. Citation2021).
The above models demonstrate the potential of ViT and CNN structures as backbone models in the CV domain. In the classification task of HSI, the information of the spectral dimension needs to be fully utilized. A 3D convolution operation can read the information of the spectral dimension in the form of a cube (Mayra et al. Citation2021; Paoletti et al. Citation2019), and a continuity operation can ensure the consistency of the information. However, a 3D convolution operation introduces spectral dimensionality, so the number of parameters increases, as does the training time, which limits the application of 3D CNNs. Tailored to the characteristics of HSI, we develop a novel mobile three-dimensional CvT-based network structure (called MDvT) to achieve high performance in HSI classification. The MDvT introduces 3D convolution to better acquire spectral dimension features, uses inverse residual structure to reduce model parameters, and uses mobile block to speed up model operation, thus improving HSI classification tasks. The following is a summary of this paper’s significant contributions:
We proposed a new CvT-based network framework (MDvT) for HIS classification, to enable 3D convolution to better fit the hybrid model of CNN and transformer.
In MDvT, 3D convolution is introduced to learn the continuous information of the spectral dimension, while using inverse residual structure to reduce the number of model parameters; the mobile 3D convolution transformer block reduces the repetitive computation of the self-attention mechanism and speeds up the model operation.
Using the publicly available WHU-Hi unmanned aerial vehicle (UAV)-borne hyperspectral dataset and Pavia University dataset, the classification performance of MDvT is evaluated qualitatively and quantitatively through extensive ablation experiments. Compared with the classical model and other state-of-the-art networks, MDvT shows significant superiority.
The remainder of the paper is structured as follows. In Section 2, we briefly review the transformer principle and introduce the three modules comprising MDvT in detail. The experimental setup and HSI dataset are described in Section 3. In Section 4, we describe the results of the model performance on four HSI datasets. We provide a discussion of our findings in Section 5, and a comprehensive summary and brief outlook on future research in Section 6.
2. Methodology
2.1. Brief review of transformers
Transformers (Vaswani et al. Citation2017) are models that rely entirely on self-attention mechanisms to access global dependencies, abandoning traditional CNN structures (Zaremba, Sutskever, and Vinyals Citation2014), and now dominate in natural language processing (Wang et al. Citation2018). For a standard transformer, the input layer is a series of 2D sequences, while for HSI with 3D shapes, the data dimension needs to be transformed through an embedding layer. The image is first cut according to a fixed-size patch to obtain many patches, and then each patch is mapped to a one-dimensional vector (i.e. the resulting 2D matrix is the format that the transformer can process). However, because the transformer processing does not come with position information, additional position encoding needs to be added to concatenate with the generated tokens before feeding into the transformer encoder (Devlin et al. Citation2018).
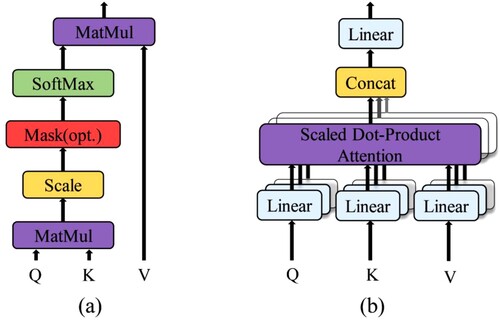
The functionality of a transformer depends heavily on the multi-head attention (MA) layer stacking and fusion (Wang et al. Citation2018), as shown in . The scaled dot-product attention module in MA expresses the dependencies between tokens using self-attention, and the token obtained from the output of the embedding layer is linearly transformed to obtain Q, K, and V. The difference in the extraction of Q, K, V is that the weights of the linear transformation matrix are different. As shown in Eq. (1), Q and K are multiplied by the dot product to obtain the dependencies between the input tokens, and then the final self-attention matrix is obtained after the scale transformation, mask, and softmax operations. Multi-head attention then uses the number of heads, n, to further divide the learned Q, K, and V into n portions to learn different features, and finally splice them together as in Eqs. (2) and (3). Hence, in this process, each token is interrelated and the weight size of each token is learned, which is beneficial to solve global long-dependency problems.
(1)
(1)
(2)
(2)
(3)
(3)
Figure 1. Attention mechanism of the transformer. (a) Scaled dot-product attention module. (b) Multi-head attention mechanism.
2.2. Brief review of CNNs
A CNN mainly uses convolutional layers to extract image information. Each convolutional layer consists of multiple convolution kernels, which act on the local area of the image to obtain local patch size information through fixed-size convolution kernels. One convolution kernel can scan the entire image to achieve weight sharing and thus reduce network complexity (LeCun et al. Citation1999).
The 2D convolution operation is expressed as follows:
(4)
(4) where i denotes the position index in the convolutional layer, j denotes the position index of feature maps in the layer,
denotes the eigenvalue of the j-th feature map in the i-th layer at (x, y),
is the offset, m is the index of all feature maps connected to the current layer from the previous convolutional layer,
is the weight of the m-th convolution kernel at (p, q),
is the height of the convolution kernel,
is the width of the convolution kernel, and f is the activation function of the convolutional layer.
To combine spatial-spectral features and process HSI data, the 3D convolution operation (Ji et al. Citation2013) is introduced, which is calculated as follows:
(5)
(5) where
denotes the size of the convolution kernel in the spectral dimension and the output of the 3D convolution operation retains the 3D volume shape of the input spectral information. The size of the output layer after the convolution operation is shown in Eq. (6):
(6)
(6) where N denotes the output image size, W denotes the input image size, p is the padding size of the input feature map, d is the padding size of the convolution kernel defaulted to 1, k is the convolution kernel’s size, and s is the convolution kernel’s move step.
2.3. Overview of MDvT
The mobile 3D convolutional vision transformer (MDvT) is a CvT-based backbone network that focuses on exploiting spatial-spectral information to make it suitable for the accurate classification of HSI. The MDvT hosts three modules – 3D convolution, mobile 3D convolution transformer block (MCTB) (Mehta and Rastegari Citation2021), and inverted residual structure (IRS) (Sandler et al. Citation2018) – which reduce the problems of the dramatic increase in the number of parameters and decrease in model speed brought about by the introduction of 3D convolution while fully utilizing the spectral information. The number of parameters in the self-attention mechanism are reduced by MCTB, and IRS reduces the number of parameters brought by 3D convolution to streamline the model and reach the optimal model state with the loss of as little accuracy as possible.
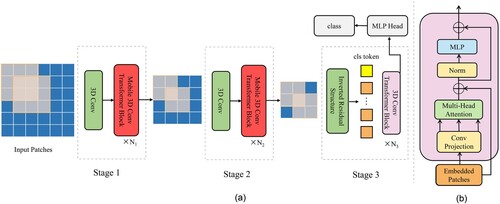
As shown in , the MDvT draws on the structural design of the multi-stage hierarchy of CvT, which consists of three stages in total. Each stage comprises two parts. First, the 3D convolutional layer performs a down-sampling operation on the feature layer, and then the output result of the convolution operation is transformed into a token form acceptable to the transformer for self-attention learning. b shows the transformer block of the last stage, which differs from that in stages 1 and 2 in that it uses depthwise separable convolution instead of linear mapping.
Figure 2. Network overview diagram of MDvT. MDvT consists of three core components: 3D convolution, mobile 3D convolution transformer block, and inverted residual structure.
2.4. Mobile 3D convolution transformer block
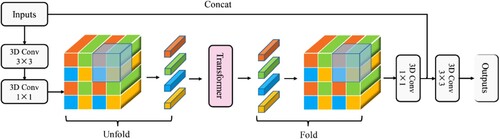
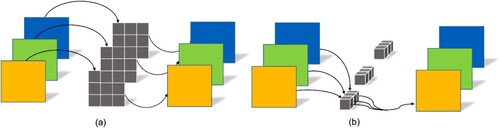
The MCTB is one of the core modules of the model, designed to accelerate the modeling of local and global information of the input tensor. The feature map is first modeled with local features through a 3 × 3 convolutional layer, and then the number of channels is adjusted through a 1 × 1 convolutional layer. The data are then immediately adjusted to token format by an ‘unfold’ operation and fed into the transformer for global feature extraction. A ‘fold’ operation then converts the token into a format that can be processed by the convolutional layer, and the number of channels is adjusted back to the original size through a 1 × 1 convolutional layer. Along the channel direction, the output result is concatenated with the original input feature map, and eventually a 3 × 3 convolutional layer is employed for feature fusion. It is worth noting that the data size does not change during the entire process.
For ordinary self-attention computation, it is generally straightforward to flatten the H and W dimensions to get a token sequence, i.e. [N, H, W, C] → [N, H*W, C], where N is the batch size, H is the height of the feature map, W is the width, and C is the number of convolution kernels. However, in MCTB, the 3D convolution layer is first introduced so that the input data becomes [N, C, H, W, B] (B is the number of bands); a square with side length 2 is also used to continue dividing the H, W, and B directions of the feature map, as shown in , so the dimension of the token sequence becomes [N*8, H*W*B/8, C]. Each token only performs self-attention with a token of the same color, so the theoretical computational cost of attention is 1/8 of the original. Thus, the MCTB reduces the amount of data input to the transformer, greatly increasing the speed of the model run.
Figure 3. Diagram of the mobile 3D convolution transformer block.
2.5. Inverted residual structure
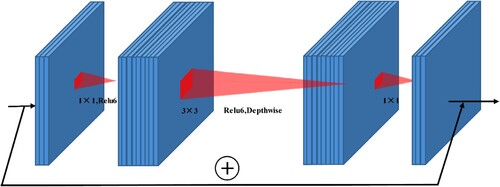
The inverted residual structure is designed to satisfy full information mining under the input condition of low-dimensional data, aiming to achieve a balance in terms of data volume and extraction efficiency. As shown in , a 1 × 1 convolutional layer is first used to map the low-dimensional information to higher dimensions, then depthwise separable (DS) convolution is used to learn the feature information, and finally a 1 × 1 convolutional layer restores the number of convolution kernels to the size of the input. If the input and output data dimensions are the same, a shortcut operation is added. The activation function uses the Relu6 function, and the final layer of IRS uses a linear activation function to reduce the large loss of low-dimensional feature information caused by the Relu6 function (Sandler et al. Citation2018).
Figure 4. Diagram of the inverted residual structure.
Compared with traditional convolution operations, DS convolution substantially reduces the number of convolution operation parameters. As shown in , DS convolution comprises two parts. a shows that the depth of the convolution kernel of depthwise convolution is 1, and each convolution kernel only performs the convolution operation with one channel of the input matrix. b shows that the size of the convolution kernel of pointwise convolution is 1 × 1, and the depth of the convolution kernel is equal to the channel of the input feature matrix. Therefore, the computation cost of DS convolution is , where
denotes the size of the input feature matrix,
denotes the channel depth of the input feature matrix,
denotes the size of the convolution kernel, and
denotes the channel depth of the output feature matrix. The computational cost of the standard convolutional layer is
; in general,
is equal to 3, so the number of parameters in ordinary convolution is 8–9 times that in DS convolution. This is also valid for 3D convolutional layers, thereby reducing the model parameters with reduced accuracy loss.
Figure 5. Diagrams demonstrating depthwise separable convolution. (a) Depthwise convolution. (b) Pointwise convolution.
3. Experimental setup
3.1. Data description
This study used four publicly available HSI datasets. Among them, the WHU-Hi dataset (Zhong et al. Citation2018; Zhong et al. Citation2020) produced by Wuhan University from a Research study located on the Jianghan Plain of Hubei Province, China, with flat topography and abundant crop species.
The WHU-Hi-HongHu dataset comprised a complex agricultural scene with crop categories including different species of the same crop. The image has a spatial resolution of about 0.043 m, a size of 940 × 475 pixels, and 270 bands in the 400–1000 nm band coverage range. There were 22 major survey categories in the entire study scene.
The WHU-Hi-HanChuan dataset comprised an urban-rural fringe with buildings, water, and arable land containing seven crops, including strawberries, cowpeas, and soybeans. The image has a spatial resolution of about 0.109 m, a size of 1217 × 303 pixels, and 274 bands in the 400–1000 nm band coverage range. The presence of many shadow-covered areas in the images also posed a challenge for the correct differentiation of classes. There were 16 major survey categories in the entire study scene.
The WHU-Hi-LongKou dataset comprised a simple agricultural scenario containing six crop species: maize, cotton, sesame, broad-leaf soybean, narrow-leaf soybean, and rice. The image has a spatial resolution of about 0.463 m, a size of 550 × 400 pixels, and 270 bands in the 400–1000 nm band coverage range. There were nine major survey categories in the entire study scene.
The Pavia University dataset was acquired by the Reflection Optical System Imaging Spectrometer (ROSIS) sensor in the city of Pavia, Italy. The image has a spatial resolution of about 1.3 m, a size of 610 × 340 pixels, and 103 bands in the 430–860 nm band coverage range. There were nine major survey categories in the entire study scene. lists the four datasets’ specific categories as well as the associated numbers of training and testing sets.
Table 1. Summary of category information for the HSI dataset.
3.2. Comparison algorithms
Eight representative backbone networks were selected as the comparison strategies for HSI classification, including the machine learning method RF, classical CNN network, transformer, and transformer’s deformation. The specific setup parameters of the above models were as follows.
For RF, 200 decision trees were set in the experiments.
The 3D CNN architecture had seven convolutional blocks. Each convolutional block consisted of a convolutional layer, batch normalization layer, and Relu activation function. The convolution kernel’s size was 3 × 3 × 7 and the number of channels was set to [64, 128, 256].
For Resnet, with 34 layers of depth, the convolution kernel’s size included two types, 3 × 3 and 7 × 7, and the number of channels was set to [64, 128, 256, 512]. Compared with conventional CNN, the residual structure was added to prevent model degradation caused by too-deep layers of the network.
For ViT, only the encoder module of the transformer was used; its depth was 12, the number of heads was 10, and the token dimension of the transformer was 128.
For CvT, the convolution kernel’s size was 3 × 3, stride was 2, number of channels was [64, 128, 256], depth of the transformer was [2, 4, 6], and number of heads was [2, 4, 4] in order.
For CvT3D, the convolution kernel’s size was 3 × 3 × 3, and the rest of the parameter settings were the same as for the CvT model.
The SpectralFormer is a variant of the ViT-based model. It introduced groupwise spectral embedding (GSE) to exploit spectral information and used cross-layer adaptive fusion (CAF) to achieve cross-layer information transfer. The band patch’s size was 7, and the rest of the parameter settings were the same as for the ViT model.
For A2S2K-ResNet (Roy et al. Citation2021), jointed extraction of spectral-space features using improved 3D ResBlocks with an efficient feature recalibration (EFR) mechanism to improve classification performance. The patch size was 15, and the rest of the parameter settings were the same as for its original papers.
For the MDvT model proposed in this paper, the design guidelines of ViT and CvT were followed, and the parameters of the model were set to be the same as those of CvT3D.
Models of neural networks were implemented under the PyTorch framework, and the workstation used was mainly Google’s free Colaboratory platform with a built-in NVIDIA Tesla T4 12.68 GB GPU. The optimizer used in the above neural network models was AdamW (Loshchilov and Hutter Citation2017), the initial learning rate (lr) was 5e−4, the lr was adjusted once every 10 iterations, with each update of 0.9 times the lr, and the number of epochs was 200. For both the CNN model and its hybrid model, the value of the patch size was 15. Owing to the huge amount of HSI data and the pressure of calculation, the data was preprocessed and the number of spectral bands was limited to 100 using principal component analysis (Yue et al. Citation2015) for dimensionality reduction. Finally, the categorization findings were quantitatively assessed using the overall accuracy (OA), average accuracy (AA), and Kappa coefficient. To verify the validity of the method, each experiment was repeated ten times to obtain the average precision and standard deviation.
4. Results
The classification maps of the WHU-Hi-HongHu dataset obtained using MDvT and other comparison methods are shown in , and the specific accuracy evaluations are presented in . The results of RF (c) shows many regional misclassifications owing to the similarity in spectral information of different crops and severe within-class spectral variability in HSI. For instance, there was a significant misinterpretation between bare soil and cotton firewood, and small Brassica chinensis and rape. Compared to the machine learning approach, deep learning methods showed significant improvements in HSI classification. The 3D CNN (d) and Resnet (e) maps also show many misclassified areas, but OA was improved by 36.61% and 37.65%, respectively, compared with RF. Because these methods only obtain the information of local patches and fail to make full use of global dependencies, the classification results showed more fragmented blocks. However, the ViT model can solve the problem of global dependencies, and the fragmented regions in the classification results (f) were significantly reduced. The CvT model integrates the convolutional layer of the hierarchical structure based on ViT, and the OA was improved by 3.16% compared with ViT. Meanwhile, CvT3D replaces the 2D convolution operation of CvT with 3D convolution, and the fragmentation of the classification results (h) was further reduced compared with CvT, but the OA was reduced. The SpectralFormer model introduces spectral embedding and cross-layer fusion modules, making fuller use of spectral-spatial information compared to ViT, and the OA was improved by 2.91%. The A2S2K-ResNet has an adaptive spectral spatial information discrimination mechanism, and the OA was improved by 8.37%. The experiment results show that the introduction of spectral dimension in the base model will effectively improve the HSI classification accuracy. From both a visual perspective and in terms of quantitative analysis, MDvT achieves the best accuracy, showing that the introduced IRS and MCTB modules can better integrate 3D convolution into the transformer.
Figure 6. Results of classification from the WHU-Hi-HongHu dataset using various models. (a) True color image (R: band 108, G: band 68, and B: band 32). (b) Ground-truth image. (c) RF. (d) 3D CNN. (e) Resnet. (f) ViT. (g) CvT. (h) CvT3D. (i) SpectralFormer. (j) A2S2K-ResNet. (k) MDvT.
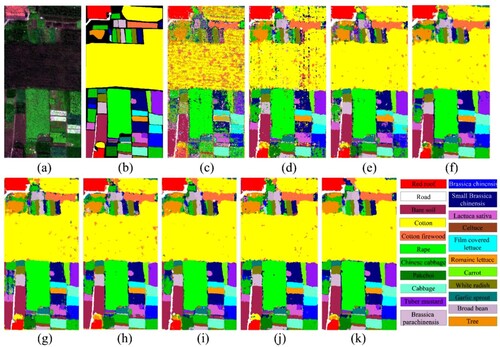
Table 2. Accuracy of classification for the WHU-Hi-HongHu dataset. The most outstanding results for each class are highlighted in bold.
The classification maps of the WHU-Hi-HanChuan dataset obtained using MDvT and other comparison methods are shown in , and the specific accuracy evaluations are presented in . Shadow patches were prevalent in the image because the WHU-Hi-HanChuan dataset was collected in the afternoon when the sun’s elevation angle was low, and compared to places with typical illumination, those locations displayed extremely low brightness. For RF method, the classification results showed a large number of misclassified regions (c). The 3D CNN method does not include a maxing pooling layer, dropout layer, or other ways to enhance the operation of model generalization, so a serious fragmentation phenomenon was present (d). In Resent, soybean and gray roof, and soybean and cowpea also showed serious misclassifications. Compared with RF, the OA of CvT and CvT3D improved by 25.52% and 23.27%, respectively, but misclassification still occurred in shaded coverage areas. For ViT, SpectralFormer and A2S2K-ResNet methods, overall they have achieved high precision performance. However, compared with MDvT, there are still fragmented regions, which is due to the multi-scale feature extraction of MDvT, which has a higher advantage for the recognition of spectrally similar features.
Figure 7. Results of classification from the WHU-Hi-HanChuan dataset using various models. (a) True color image (R: band 108, G: band 68, and B: band 32). (b) Ground-truth image. (c) RF. (d) 3D CNN. (e) Resnet. (f) ViT. (g) CvT. (h) CvT3D. (i) SpectralFormer. (j) A2S2K-ResNet. (k) MDvT.
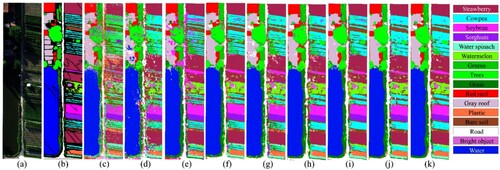
Table 3. Accuracy of classification for the WHU-Hi-HanChuan dataset. The most outstanding results for each class are highlighted in bold.
The classification maps of the WHU-Hi-LongKou dataset obtained using MDvT and other comparison methods are shown in , and the specific accuracy evaluations are presented in . Compared with the two previous datasets, the WHU-Hi-LongKou dataset is relatively simple and has more obvious interclass characteristics. The OA of RF reached 87.85%. However, no contextual information was combined, and fragmentation and misclassification were still evident. For example, cotton and broad-leaf soybean, and corn and mixed weeds were distinguished with low accuracy (c). The 3D CNN map also exhibited large blocks of misclassification (d), while the Resnet classification results showed small patches of broad-leaf soybean identified as narrow-leaf soybean (e). The transformer-based models all achieved high accuracy classification results, with the highest OA of 99.10% for MDvT. For the misclassification phenomenon of broad-leaf soybean and cotton, MDvT can also handle it well, indicating that the detailed extraction of local information and the fusion of global information can accurately separate the features.
Figure 8. Results of classification from the WHU-Hi – LongKou dataset using various models. (a) True color image (R: band 108, G: band 68, and B: band 32). (b) Ground-truth image. (c) RF. (d) 3D CNN. (e) Resnet. (f) ViT. (g) CvT. (h) CvT3D. (i) SpectralFormer. (j) A2S2K-ResNet. (k) MDvT.
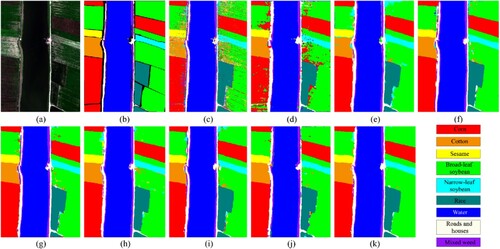
Table 4. Accuracy of classification for the WHU-Hi – LongKou dataset. The most outstanding results for each class are highlighted in bold.
The classification maps of the Pavia University dataset obtained using MDvT and other comparison methods are shown in and the specific accuracy evaluations are presented in . Deep learning does improve the pretzel phenomenon compared to the machine learning approach. But misclassification and fragmentation are still serious. Compared with CvT3D, MDvT incorporates a variety of advanced modules that can better balance spectral and spatial information, thus alleviating the misclassification problem caused by spectral similarity. Compared to A2S2K-ResNet, the basic CNN and transformer framework in MDvT acquires global texture information and detailed abstraction information, so the performance is in the leading position.
Figure 9. Results of classification from the Pavia University dataset using various models. (a) True color image (R: band 55, G: band 7, and B: band 31). (b) Ground-truth image. (c) RF. (d) 3D CNN. (e) Resnet. (f) ViT. (g) CvT. (h) CvT3D. (i) SpectralFormer. (j) A2S2K-ResNet. (k) MDvT.
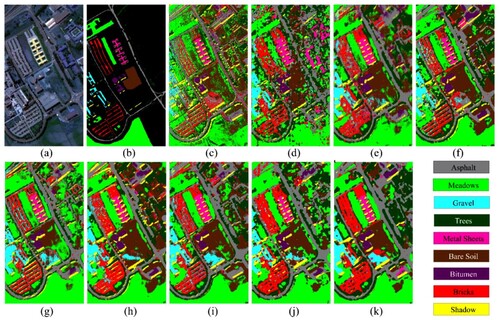
Table 5. Accuracy of classification for the Pavia University dataset. The most outstanding results for each class are highlighted in bold.
5. Discussion
5.1. Sensitivity of training set size to classification results
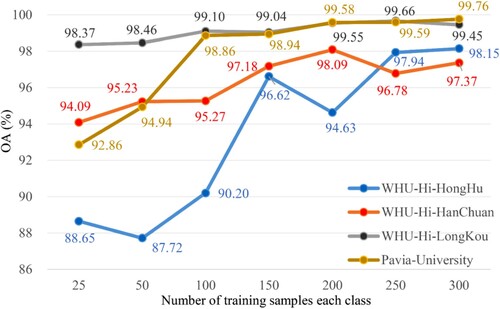
Owing to the complex structure of HSI data, the hierarchy of CNNs often needs a high amount of training samples to acquire valid information between categories, so a small amount of training data may lead to overfitting. For practical feature classification scenarios, labeled samples are often very limited, so finding ways to maximize the learning ability of the model with a small number of samples is an important issue in classification scenarios. As shown in , the WHU-Hi and Pavia University datasets were used to evaluate the images of HSI classification results with different numbers of training samples. Each training sample was run ten times to obtain the average OA result and its standard deviation. As increasing the percentage of training samples, the OA tended to increase; it is also noteworthy that MDvT showed good classification performance with small samples of (25, 50) in the training set.
Figure 10. Effect of different number of training samples on MDvT in WHU-Hi and Pavia University datasets.
5.2. Impact of patch size on MDvT classification performance
It is well known that patch size is an important hyperparameter for CNN models(Jin et al. Citation2020). Different patch sizes have different degrees of influence on a model, and the findings indicate that adding the patch size appropriately can improve the accuracy of a model. However, too large an input data size may introduce additional noise, particularly when the pixels are situated towards the category’s boundaries, which could reduce accuracy (Zhang, Zhao, and Zhang Citation2020). Furthermore, the deep learning-based approach is inherently demanding on the chosen computational hardware, with overly large input data adding to the hardware burden and substantially increasing the training time and video memory usage. Using the WHU-Hi-HongHu dataset as an example, different patch sizes were selected to explore their effect on the MDvT’s categorization precision. According to the results in , the highest classification accuracy was achieved with an input size of 19 × 19. However, the training time and running memory of the model increase substantially as the input size increases. Compared with the 19 × 19 input size, the 15 × 15 input size lost 0.68% of OA, but the model training time was reduced by 42.37%. Therefore, we determined 15 × 15 to be the optimal patch size.
Table 6. Impact of patch size on MDvT classification performance. Time denotes the time required for the model to train an epoch. The most outstanding results are highlighted in bold.
5.3. Ablation study for the MDvT method
The addition of different modules (i.e. IRS and MCTB) to a network can improve model classification accuracy. Therefore, different modules were chosen to be added gradually to the network and the WHU-Hi-HongHu dataset was used to study their effectiveness for the HSI classification task. There are three stages in the MDvT model, each divided into two parts, and three different modules were added to the model to judge the classification performances of specific combinations. It is worth noting that the MCTB uses a square of length 2 to cut the data, so the minimum size of the input data must be ≥ 4. The common patch size value was 15, so the MCTB can be used at most twice in the entire model. From , it can be seen that using MCTB twice can improve the accuracy of the model by 5.74%–7.63%, greatly reduce the training time by 57.32%–60.92%, and improve the model training parameters. The number of model parameters can be reduced by IRS; for example, for CvT3IRS compared with the same configuration of CvT3D, the model parameters were reduced by 0.7 M, but the accuracy decreased by 0.78%–5.62%. The classification accuracy will be reduced by using IRS too much in MDvT. Therefore, 3D convolution is used for the input data of the first two stages, and IRS is used only in the last stage to limit the amount of MDvT parameters and control overfitting. Experimentally, the best classification efficiency is driven by the MDvT module combination in HSI, shortening the training time and limiting the number of model parameters while improving classification accuracy.
Table 7. Ablation experiments on the WHU-Hi-HongHu dataset with a CvT-based backbone model combined with different modules. Param denotes the training parameters of the model, and Time denotes the time required for the model to train an epoch. The most outstanding results are highlighted in bold.
5.4. Deep feature visualization of MDvT
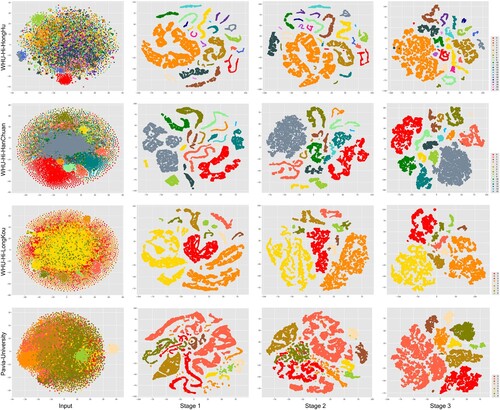
High-dimensional data are frequently visualized using the t-distributed stochastic neighbor embedding (t-SNE) technique (van der Maaten and Hinton Citation2008); it is capable of mapping data between high-dimensional and low-dimensional spaces, shorten the distance between similar categories, enlarge the gap between different instances, and keep the regional characteristics of the original data. To further understand the learning process within the MDvT model, the feature extraction results of the three stages in the model were visualized. As shown in , the input data classes were highly similar to each other with serious overlap. After the output results of the first stage of the model, most of the classes were clearly distinguished, although there were still scattered clusters distributed in different regions. After the second stage, the same classes were closer to each other, but some confusion occurred between features with similar spectral information; for example, Chinese cabbage and Lactuca sativa in the WHU-Hi-HongHu dataset, plastic and road in the WHU-Hi-HanChuan dataset, narrow-leaf soybean and rice in the WHU-Hi-LongKou dataset, and Asphalt and Gravel in the Pavia University dataset. Following the third stage, the classification task was essentially complete, the distinction between classes was obvious, and the boundaries of each type of feature could clearly be seen ().
Figure 11. Visualization of the distribution of categories in the feature maps of each stage of MDvT in the WHU-Hi and Pavia University datasets using t-SNE. The numbering of the categories in the figure corresponds to .
6. Conclusion
To fully utilize the spatial-spectral information of HSI, a new mobile 3D convolutional vision transformer network (MDvT) is proposed. The MDvT aims to meet the classification challenges of complex and diverse crop plots with highly similar spectral features. In MDvT, a layered hierarchy is used to combine multi-scale information while better adapting to global dependencies, thus improving the generalization ability of the model. Unlike ordinary CNNs that poorly mine and express the spectral features’ sequence characteristics, invoking 3D convolution pays full attention to spectral information. Lightweight modules (IRS and MCTB) are subsequently introduced to accelerate the model while taking into account the extraction of global features. Experimental results using the WHU-Hi dataset show that MDvT outperforms other classical classification models (e.g. Resnet, ViT, CvT, and others) and can provide high-performance results for HSI classification.
Our ablation experiments showed that the MDvT can still achieve class-leading levels of performance with small sample sizes. The IRS and MCTB modules reduced the number of model parameters, greatly speeding up the model run. For features with highly similar spectra, the model showed a notable ability to distinguish them in the first stage. The efficiency of HSI classification was improved by increasing the differences between complex categories.
In future research, lightweight models remain a focus of research in remote sensing classification tasks. The operation of reducing token sequence inter-multiplication in the MCTB module will be an important factor in improving the speed of MDvT runtime, and should be more widely used in the CNN and transformer hybrid model. In addition, we also hope to use more advanced techniques (e.g. weakly supervised learning and self-supervised learning) to further improve the hybrid architecture, reduce the dependence on samples, and improve the HSI classification performance.
Acknowledgement
The authors would especially like to thank Wuhan University and Pavia University for providing the open HSI dataset.
Disclosure statement
No potential conflict of interest was reported by the author(s).
References
- Adam, E., O. Mutanga, and D. Rugege. 2010. “Multispectral and Hyperspectral Remote Sensing for Identification and Mapping of Wetland Vegetation: A Review.” Wetlands Ecology and Management 18 (3): 281–296. doi:10.1007/s11273-009-9169-z.
- Bazi, Y., L. Bashmal, M. M. Al Rahhal, R. Al Dayil, and N. Al Ajlan. 2021. “Vision Transformers for Remote Sensing Image Classification.” Remote Sensing 13 (3): 516–534. doi:10.3390/rs13030516.
- Chen, Y. S., H. L. Jiang, C. Y. Li, X. P. Jia, and P. Ghamisi. 2016. “Deep Feature Extraction and Classification of Hyperspectral Images Based on Convolutional Neural Networks.” IEEE Transactions on Geoscience and Remote Sensing 54 (10): 6232–6251. doi:10.1109/TGRS.2016.2584107.
- Dalponte, M., H. O. Orka, T. Gobakken, D. Gianelle, and E. Naeesset. 2013. “Tree Species Classification in Boreal Forests With Hyperspectral Data.” IEEE Transactions on Geoscience and Remote Sensing 51 (5): 2632–2645. doi:10.1109/TGRS.2012.2216272.
- Devlin, Jacob, Ming-Wei Chang, Kenton Lee, and Kristina Toutanova. 2018. “Bert: Pre-training of Deep Bidirectional Transformers for Language Understanding.” arXiv preprint arXiv:1810.04805.
- Dosovitskiy, Alexey, Lucas Beyer, Alexander Kolesnikov, Dirk Weissenborn, Xiaohua Zhai, Thomas Unterthiner, Mostafa Dehghani, et al. 2020. “An Image is Worth 16(16 Words: Transformers for Image Recognition at Scale.” arXiv preprint arXiv:2010.11929.
- Fauvel, M., Y. Tarabalka, J. A. Benediktsson, J. Chanussot, and J. C. Tilton. 2013. “Advances in Spectral-Spatial Classification of Hyperspectral Images.” Proceedings of the IEEE 101 (3): 652–675. doi:10.1109/JPROC.2012.2197589.
- Gislason, Pall Oskar, Jon Atli Benediktsson, and Johannes R Sveinsson. 2006. “Random Forests for Land Cover Classification.” Pattern Recognition Letters 27 (4): 294–300. doi:10.1016/j.patrec.2005.08.011
- He, X., Y. S. Chen, and Z. H. Lin. 2021. “Spatial-Spectral Transformer for Hyperspectral Image Classification.” Remote Sensing 13 (3): 498–518. doi:10.3390/rs13030498.
- Hong, D. F., Z. Han, J. Yao, L. R. Gao, B. Zhang, A. Plaza, and J. Chanussot. 2022. “SpectralFormer: Rethinking Hyperspectral Image Classification With Transformers.” IEEE Transactions on Geoscience and Remote Sensing 60: 1–15. d oi:Art n 5518615 1 0.1109/Tgrs.2021.3130716.
- Hong, D. F., W. He, N. Yokoya, J. Yao, L. R. Gao, L. P. Zhang, J. Chanussot, and X. X. Zhu. 2021. “Interpretable Hyperspectral Artificial Intelligence: When Nonconvex Modeling Meets Hyperspectral Remote Sensing.” IEEE Geoscience and Remote Sensing Magazine 9 (2): 52–87. doi:10.1109/MGRS.2021.3064051.
- Ji, S. W., W. Xu, M. Yang, and K. Yu. 2013. “3D Convolutional Neural Networks for Human Action Recognition.” IEEE Transactions on Pattern Analysis and Machine Intelligence 35 (1): 221–231. doi:10.1109/TPAMI.2012.59.
- Jin, K., Y. L. Chen, B. Xu, J. J. Yin, X. S. Wang, and J. Yang. 2020. “A Patch-to-Pixel Convolutional Neural Network for Small Ship Detection With PolSAR Images.” IEEE Transactions on Geoscience and Remote Sensing 58 (9): 6623–6638. doi:10.1109/TGRS.2020.2978268.
- Lassalle, G. 2021. “Monitoring Natural and Anthropogenic Plant Stressors by Hyperspectral Remote Sensing: Recommendations and Guidelines Based on a Meta-Review.” Science of the Total Environment 788: 147758. doi:10.1016/j.scitotenv.2021.147758.
- LeCun, Yann, Patrick Haffner, Léon Bottou, and Yoshua Bengio. 1999. “Object Recognition with Gradient-Based Learning.” Shape, Contour and Grouping in Computer Vision, 319–345. Springer. doi:10.1007/3-540-46805-6_19
- Lee, H., and H. Kwon. 2017. “Going Deeper With Contextual CNN for Hyperspectral Image Classification.” IEEE Transactions on Image Processing 26 (10): 4843–4855. doi:10.1109/TIP.2017.2725580.
- Li, L., J. H. Yin, X. P. Jia, S. Li, and B. N. Han. 2021. “Joint Spatial-Spectral Attention Network for Hyperspectral Image Classification.” IEEE Geoscience and Remote Sensing Letters 18 (10): 1816–1820. doi:10.1109/LGRS.2020.3007811.
- Li, R., S. Y. Zheng, C. X. Duan, L. B. Wang, and C. Zhang. 2022. “Land Cover Classification from Remote Sensing Images Based on Multi-Scale Fully Convolutional Network.” Geo-Spatial Information Science 25 (2): 278–294. doi:10.1080/10095020.2021.2017237.
- Lim, Bee, Sanghyun Son, Heewon Kim, Seungjun Nah, and Kyoung Mu Lee. 2017. “Enhanced Deep Residual Networks for Single Image Super-Resolution.” IEEE Conference on Computer Vision and Pattern Recognition Workshop, 136–144. doi:10.48550/arXiv.1707.02921.
- Liu, Ze, Yutong Lin, Yue Cao, Han Hu, Yixuan Wei, Zheng Zhang, Stephen Lin, and Baining Guo. 2021. “Swin Transformer: Hierarchical Vision Transformer Using Shifted Windows.” International Conference on Computer Vision (ICCV), 10012–10022. arXiv preprint arXiv:2103.14030.
- Loshchilov, Ilya, and Frank Hutter. 2017. “Decoupled Weight Decay Regularization.” arXiv preprint arXiv:1711.05101.
- Mayra, J., S. Keski-Saari, S. Kivinen, T. Tanhuanpaa, P. Hurskainen, P. Kullberg, L. Poikolainen, et al. 2021. “Tree Species Classification from Airborne Hyperspectral and LiDAR Data Using 3D Convolutional Neural Networks.” Remote Sensing of Environment, 256. d oi:ART N 112322 1 0.10 16/j.rse.2021.112322.
- Mehta, Sachin, and Mohammad Rastegari. 2021. “Mobilevit: Light-Weight, General-Purpose, and Mobile-Friendly Vision Transformer.” arXiv preprint arXiv:2110.02178.
- Melgani, Farid, and Lorenzo Bruzzone. 2004. “Classification of Hyperspectral Remote Sensing Images with Support Vector Machines.” IEEE Transactions on Geoscience and Remote Sensing 42 (8): 1778–1790. doi:10.1109/TGRS.2004.831865
- Mou, L. C., P. Ghamisi, and X. X. Zhu. 2017. “Deep Recurrent Neural Networks for Hyperspectral Image Classification.” IEEE Transactions on Geoscience and Remote Sensing 55 (7): 3639–3655. doi:10.1109/TGRS.2016.2636241.
- Paoletti, M. E., J. M. Haut, J. Plaza, and A. Plaza. 2018. “A New Deep Convolutional Neural Network for Fast Hyperspectral Image Classification.” ISPRS Journal of Photogrammetry and Remote Sensing 145: 120–147. doi:10.1016/j.isprsjprs.2017.11.021.
- Paoletti, M. E., J. M. Haut, J. Plaza, and A. Plaza. 2019. “Deep Learning Classifiers for Hyperspectral Imaging: A Review.” ISPRS Journal of Photogrammetry and Remote Sensing 158: 279–317. doi:10.1016/j.isprsjprs.2019.09.006.
- Peng, Zhiliang, Wei Huang, Shanzhi Gu, Lingxi Xie, Yaowei Wang, Jianbin Jiao, and Qixiang Ye. 2021. “Conformer: Local Features Coupling Global Representations for Visual Recognition.” Proceedings of the IEEE/CVF International Conference on Computer Vision, 367–376. doi:10.48550/arXiv.2105.03889.
- Roy, S. K., S. Manna, T. Song, and L. Bruzzone. 2021. “Attention-Based Adaptive Spectral–Spatial Kernel ResNet for Hyperspectral Image Classification.” IEEE Transactions on Geoscience and Remote Sensing 59 (9): 7831–7843. doi:10.1109/TGRS.2020.3043267.
- Russwurm, M., and M. Korner. 2020. “Self-Attention for Raw Optical Satellite Time Series Classification.” ISPRS Journal of Photogrammetry and Remote Sensing 169: 421–435. doi:10.1016/j.isprsjprs.2020.06.006.
- Sandler, Mark, Andrew Howard, Menglong Zhu, Andrey Zhmoginov, and Liang-Chieh Chen. 2018. “Mobilenetv2: Inverted Residuals and Linear Bottlenecks.” Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 4510–4520. arXiv:1801.04381.
- Vali, A., S. Comai, and M. Matteucci. 2020. “Deep Learning for Land Use and Land Cover Classification Based on Hyperspectral and Multispectral Earth Observation Data: A Review.” Remote Sensing 12 (15): 2495–2526. doi:10.3390/rs12152495.
- van der Maaten, L., and G. Hinton. 2008. “Visualizing Data Using t-SNE.” Journal of Machine Learning Research 9: 2579–2605. doi:10.1080/15440478.2023.2172638.
- van der Meer, F. D., H. M. A. van der Werff, F. J. A. van Ruitenbeek, C. A. Hecker, W. H. Bakker, M. F. Noomen, M. van der Meijde, E. J. M. Carranza, J. B. de Smeth, and T. Woldai. 2012. “Multi- and Hyperspectral Geologic Remote Sensing: A Review.” International Journal of Applied Earth Observation and Geoinformation 14 (1): 112–128. doi:10.1016/j.jag.2011.08.002.
- Vaswani, Ashish, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N. Gomez, Łukasz Kaiser, and Illia Polosukhin. 2017. “Attention is all you Need.” Advances in Neural Information Processing Systems 30: 5998–6008. arXiv:1706.03762.
- Wang, Xiaolong, Ross Girshick, Abhinav Gupta, and Kaiming He. 2018. Non-Local Neural Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June.
- Wang, Q., J. Z. Lin, and Y. Yuan. 2016. “Salient Band Selection for Hyperspectral Image Classification via Manifold Ranking.” IEEE Transactions on Neural Networks and Learning Systems 27 (6): 1279–1289. doi:10.1109/TNNLS.2015.2477537.
- Wang, Alex, Amanpreet Singh, Julian Michael, Felix Hill, Omer Levy, and Samuel R Bowman. 2018. “GLUE: A Multi-Task Benchmark and Analysis Platform for Natural Language Understanding.” arXiv preprint arXiv:1804.07461.
- Wang, Wenhai, Enze Xie, Xiang Li, Deng-Ping Fan, Kaitao Song, Ding Liang, Tong Lu, Ping Luo, and Ling Shao. 2021. “Pyramid Vision Transformer: A Versatile Backbone for Dense Prediction Without Convolutions.” International Conference on Computer Vision (ICCV), 568–578. arXiv:2102.12122.
- Wu, Zhanghao, Zhijian Liu, Ji Lin, Yujun Lin, and Song Han. 2020. “Lite Transformer with Long-Short Range Attention.” arXiv preprint arXiv:2004.11886.
- Wu, H., B. Xiao, N. Codella, M. Liu, X. Dai, L. Yuan, and L. Zhang. 2021. “CvT: Introducing Convolutions to Vision Transformers.” Proceedings of the IEEE/CVF International Conference on Computer Vision, 22–31.
- Yang, Baosong, Longyue Wang, Derek Wong, Lidia S Chao, and Zhaopeng Tu. 2019. “Convolutional Self-Attention Networks.” arXiv preprint arXiv:1904.03107.
- Yu, S. Q., D. Jia, and C. Y. Xu. 2017. “Convolutional Neural Networks for Hyperspectral Image Classification.” Neurocomputing 219: 88–98. doi:10.1016/j.neucom.2016.09.010.
- Yuan, Li, Yunpeng Chen, Tao Wang, Weihao Yu, Yujun Shi, Zi-Hang Jiang, Francis EH Tay, Jiashi Feng, and Shuicheng Yan. 2021. “Tokens-to-token vit: Training Vision Transformers from Scratch on Imagenet.” Proceedings of the IEEE/CVF International Conference on Computer Vision, 558–567. arXiv:2101.11986.
- Yuan, Y., J. Z. Lin, and Q. Wang. 2016. “Hyperspectral Image Classification via Multitask Joint Sparse Representation and Stepwise MRF Optimization.” IEEE Transactions on Cybernetics 46 (12): 2966–2977. doi:10.1109/TCYB.2015.2484324.
- Yue, J., W. Z. Zhao, S. J. Mao, and H. Liu. 2015. “Spectral-spatial Classification of Hyperspectral Images Using Deep Convolutional Neural Networks.” Remote Sensing Letters 6 (6): 468–477. doi:10.1080/2150704X.2015.1047045.
- Zaremba, Wojciech, Ilya Sutskever, and Oriol Vinyals. 2014. “Recurrent Neural Network Regularization.” arXiv preprint arXiv:1409.2329.
- Zhang, B., L. Zhao, and X. L. Zhang. 2020. “Three-dimensional Convolutional Neural Network Model for Tree Species Classification Using Airborne Hyperspectral Images.” Remote Sensing of Environment 247: 111938. doi:10.1016/j.rse.2020.111938.
- Zhao, Hengshuang, Yi Zhang, Shu Liu, Jianping Shi, Chen Change Loy, Dahua Lin, and Jiaya Jia. 2018. “PSANet: Point-Wise Spatial Attention Network for Scene Parsing.” Proceedings of the European Conference on Computer Vision, 267–283. doi:10.1007/978-3-030-01240-3_17.
- Zhong, Yanfei, Xin Hu, Chang Luo, Xinyu Wang, Ji Zhao, and Liangpei Zhang. 2020. “WHU-Hi: Uav-Borne Hyperspectral with High Spatial Resolution (H2) Benchmark Datasets and Classifier for Precise Crop Identification Based on Deep Convolutional Neural Network with CRF.” Remote Sensing of Environment 250: 112012. doi:10.1016/j.rse.2020.112012
- Zhong, Yanfei, Xinyu Wang, Yao Xu, Shaoyu Wang, Tianyi Jia, Xin Hu, Ji Zhao, Lifei Wei, and Liangpei Zhang. 2018. “Mini-UAV-borne Hyperspectral Remote Sensing: From Observation and Processing to Applications.” IEEE Geoscience and Remote Sensing Magazine 6 (4): 46–62. doi:10.1109/MGRS.2018.2867592