
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
To develop effective strategies for the supply of shared parking and study various theoretical choice models under uncertainty, this paper investigates private parking space owners’ propensity to engage in shared parking schemes using a stated choice experiment that involves an uncertain key attribute. A hybrid expected utility-regret model incorporating rejoice is specified to explore the participation behavior. Equivalent models considering the perception of attribute differences are also estimated. Results show that socio-demographic characteristics, social influence, government’s role, media attention, platform fee, and revenues are all important factors explaining private parking owners’ propensity to engage in shared parking schemes. Besides, the model incorporating all these components, including the emotions of regret and rejoice and the perception of attribute differences, yields the best results. These findings could help promote the policy development toward increasing people’s engagement in shared parking.
Introduction
For thousands of years, people have been sharing the use of assets. The advent of the internet and the use of big data have made it easier for asset owners and users to find each other. This dynamic has been referred to as the sharing economy, which is an IT-facilitated peer-to-peer model for commercial or noncommercial sharing of underutilized goods and service capacity through an intermediary without transfer of ownership (Schlagwein, Schoder, and Spindeldreher Citation2020).
As cities continue to thrive and their population increases, it is inevitable that finding an empty parking space is increasingly more difficult. By bouncing between lots and garages that are full, drivers become restless and may choose to park illegally or leave altogether, creating a loss for the city in more than one way. Establishing a highly functional and efficient parking management solution that ensures resident satisfaction and utilizes the existing parking lots throughout the city is needed. Applying the notion of a sharing economy to the parking industry may be a good solution to optimize existing parking capacity. Through shared parking, parking space owners can rent out their parking space at times they do not use it and generate revenues, drivers can use the shared parking space to avoid long search times and circling around, and developers can eliminate the burden to build more parking spaces, while urban planners can use the saved space for other functions.
In many cities, private parking spaces account for a large proportion of parking resources and are often idle at daytime. According to the statistics of the Hong Kong Transport Department in 2016, 485,000 parking spaces were designated for private use, which represents nearly 70% of the total number of parking spaces. Similarly, residential parking resources accounted for 58.1% of all parking resources in Beijing (Xiao, Xu, and Gao Citation2018). The peak parking hours of residential buildings are at night, while those hours of catering, office, and commercial buildings are complementary with residential buildings. Thus, it seems logical that urban parking problems can be relieved with enhanced use of these private parking resources.
To the best of our knowledge, Lalani (Citation1984) was the first to study the concept of shared parking. Different types of land that could possibly be used for shared parking were systematically discussed. However, the shared parking concept proposed in the 1980s is actually quite different from the current concept because of no support of modern technology and the Internet. The current concept of shared parking may renew people’s interest with the rise of the so-called sharing economy. It was not until a decade ago that an increasing number of publications on shared parking emerged, mainly focusing on matching, pricing, evaluation, and the willingness of different parties.
Regarding the matching problem between suppliers and users, Kim et al. (Citation2015) considered both drivers’ preferences and revenues of parking lots and developed an effective algorithm to get a stable set of assignments of parking lots. Simulation results show that the proposed approach provides a reliable solution for drivers to find a parking lot. Zhang et al. (Citation2020) allocated shared parking spaces with the goal of not only improving utilization but also reducing walking distance. Parking demand and supply data in the central district of Harbin in China were collected to evaluate the feasibility of the model. Yan et al. (Citation2021) proposed a real-time reservation approach to deal with private parking-sharing allocation problem where demands and supplies occur randomly. A two-stage heuristic algorithm is proposed to quickly obtain near-optimal results.
To examine the pricing effects on shared parking demand, Hao, Chen, and Chen (Citation2019) proposed a floating charge method for shared parking. Their results showed that compared with fixed fees, the floating charge method can improve the utilization rate of idle spaces by more than 60%. Xiao, Xu, and Gao (Citation2018) attempted to solve the pricing problem and matching problem simultaneously and therefore proposed an auction-based mechanism. Later in 2020, Xiao et al. presented a differential price strategy (DPS) and a uniform price strategy (UPS) for shared parking and found that the DPS is superior to the UPS in terms of parking platform’s payoff, while the UPS outperforms the DPS in terms of participants’ utilities.
Besides, some researchers are interested in evaluation of shared parking. Abbott and Bigazzi (Citation2017) examined the potential of shared parking with an emphasis on the imbalanced parking supply. Results based on a case study of a high-density residential neighborhood in Canada showed that on-street parking congestion could be greatly reduced by introducing a relatively small number of off-street stalls from selected residential buildings to the residential parking permit program. Zhao et al. (2021) constructed a quantitative model to estimate the effect of emission reduction in the implementation of shared parking policy. The results indicate that shared parking can not only effectively reduce the cruising time of vehicles searching for parking but also has a significantly positive effect on emission reduction.
Another line of research is related to the willingness of different parties to engage in shared parking. Liang, Eccarius, and Lu (Citation2019) investigated the intention to use shared parking from the perspective of parking space suppliers and parking space users based on the theory of planned behavior. Yan, Feng, and Timmermans (Citation2020) developed a prospect theoretical model to represent the implied decision-making of private parking space owners. Ardeshiri, Safarighouzhdi, and Rashidi (Citation2021) developed a latent class behavioral model for a sample of 1,008 residents in New South Wales, Australia, to explore drivers’ taste variation and preference for shared parking in different segments.
Among the relevant aspects related to shared parking, the decision-making of owners is seen fundamental and essential for policy makers to plan optimal parking systems. It is thus necessary to further understand the decision-making mechanisms of private owners related shared parking.
In transportation research, the decision-making process of individuals has been analyzed using a variety of models, e.g. random (expected) utility maximization (RUM) model, attitudinal models, prospect theoretic models, random regret minimization (RRM) models, satisfaction models, decision field models, etc. The most frequently used RUM model is based on the assumption that individuals are rational economic agents. Particularly in case of decision-making under uncertainty, random (expected) utility theory has been shown to not accurately represent the psychological mechanisms of decision-making between alternatives with uncertain consequences. Prospect theory has been the dominant alternative theory of decision-making under uncertainty and has outperformed random expected utility maximizing models in a great variety of contexts including transportation-related choices. Regret models offer an alternative. Bell (Citation1982) and Loomes and Sugden (Citation1982) introduced regret theory to explain individuals’ decision-making in risky choices. Rooted in regret theory, Chorus, Arentze, and Timmermans (Citation2008) proposed the random regret minimization model to account for both risky and riskless decisions. Different from regret theory which considers both expected payoffs and regret, the seminal RRM assumes that people minimize anticipated regret. The main development of regret models in transportation research has involved the introduction of different specifications of the regret function (Chorus Citation2010, 2014a; Van Cranenburgh, Guevara, and Chorus Citation2015), the introduction of rejoice as the counterpart of regret (Jang, Rasouli, and Timmermans Citation2017a, Citation2018a; Rasouli and Timmermans Citation2019; Zagonari Citation2019), and the incorporation of the perceptual mapping of objective attributes into perceived attributes (Jang, Rasouli, and Timmermans Citation2017b, Citation2018b). The number of applications of regret minimization models to decisions under uncertainty in transportation research has, however, remained very small (Kim, Rasouli, and Timmermans Citation2017).
In the context of shared parking, individual parking space owners may decide to share by pursuing the maximum profit or utility if the sharing scheme fits their parking needs linked with the activity-travel agendas of their household members. When multiple sharing schemes exist, e.g., sharing during a fixed or variant time period, the decision may depend on not only the difference between the sharing arrangement but also the difference between (main) attributes, such as time limits and expected revenue. Especially, when such conditions become uncertain, the final choice of sharing scheme may depend on individuals’ judgment on the expected derived utility, and/or regret and/or rejoice. Therefore, it is necessary to investigate the fundamental mechanisms underlying individuals’ decision-making in shared parking.
The purpose of this paper is to analyze private parking space owners’ propensity to engage in shared parking by applying models of decision-making under uncertainty. A stated choice experiment that considers the influence of social network members, the role of the government, media attention, platform fee, contract period, and possible revenue was designed to collect the relevant data. First, we propose a hybrid expected utility-regret model to explore private owners’ choices. Next, we incorporate rejoice to examine the existence of rejoice when people compare alternatives. Finally, we investigate whether the inclusion of the perception of attribute differences improves model performance.
The remainder of this paper is structured as follows: in the next section, we will first discuss the operationalization of the study, expressed in the design of the stated choice experiment and its implementation. Next, we propose and estimate a series of hybrid expected utility-regret-rejoice models, followed by a discussion of estimation results. Finally, we conclude the paper and point out avenues for future research.
Data collection
China is facing the pressure of limited parking resources due to its rapidly increasing car ownership. As a potential solution, shared parking has attracted people’s attention recently. There is, however, not any empirical knowledge on private owners’ propensity to engage in these initiatives. Consequently, stated choice data were collected in this study. These data were collected between August and October 2019 in downtown Qingdao, China. Since parking space is a household property, we assumed that owner’s choice to join shared parking programs is a household decision. Therefore, the sample was limited to couples with private parking spaces. Some communities do not allow the purchase of parking spaces but can only rent them for private use. Privately owned parking spaces in this paper refer to bought or rented parking spaces that are not open to the general public. We invite each couple to first make choices individually and then jointly to reach a household decision. Individual decision-making is the focus of this paper however, leaving household decision-making for future research.
To ensure data quality, face-to-face interviews were conducted by university students. The students were trained for their task in a group meeting in which the concept of shared parking and objectives of the study were explained. A trial interview was held to observe the performance of all student interviewers and correct them when problems occurred. After the trial interview, students could ask questions. The answers to these questions were discussed in meetings with all interviewers. For completed, high-quality interviews, we offered students a small gift for their assistance. Respondents are randomly sampled households at different locations and different times of the day. Finally, 302 couples (604 individuals) successfully completed the survey after deleting the questionnaires with incomplete answers or obvious standardized response patterns. presents the descriptive statistics of the main socio-demographic variables of the sample.
Table 1. Profile of the respondents.
It is shown that the number of males in the sample is equal to the number of females. Twenty-one and a half percent of the sample is under 30 years old, 36.8% is between 30 and 40, and most (41.7%) are over 40 years of age. Middle-income (46.4%) and high-income (20.7%) respondents account for the majority, while 32.9% has relatively low incomes. Young people and low-income people account for a lower percentage because they can afford less buying a house, car, and parking space. As for the youngest child, 14.6% of these couples have no children, 23.8% has a 0–5 years old youngest child, while the remaining 61.6% has children over 5 years of age.
Considering that the availability of a parking space may be highly dynamic because of individuals’ own needs, a stated choice experiment including three alternatives (fixed mode, flexible modes, and no interest in sharing) was designed to investigate owner’s response to shared parking. The fixed mode means that the parking space owner may sign a contract with one person to share his parking space for a fixed period of time. The flexible mode means that the owner only needs to publish the time for a shared parking space so that anyone can use the parking space within a given time period. In addition, the option ‘no interested in sharing’ is included. The flexible sharing mode allows owners to update the sharing time according to their needs, while fixed sharing means that the owner will not be able to use the parking space within the time specified in the contract. On the other hand, compared with the fixed sharing scheme, the flexible sharing scheme requires the owner to spend more time and effort considering the time period during which the parking space is not used and posting it on the online/app.
As every stated choice study, the design of the experiment started with the elicitation of attributes considered influential in the choice of interest. Because this step could not be based on a literature review, attributes were selected based on self-inspection, qualitative interviews with a small convenience sample, and an examination of the wider literature of consumer acceptance of new technology. gives an overview of selected attributes and attribute levels. One of the selected attributes is the percentage of social network members who share their parking space, following the extensive literature on social influence (Kim, Rasouli, and Timmermans Citation2017; Caiati, Rasouli, and Timmermans Citation2020; Kim, Rasouli, and Timmermans Citation2014). More specifically, we varied adoption percentages among social network members (Kim, Rasouli, and Timmermans Citation2017), differentiating between friends, coworkers, relatives, and community residents. In addition, different governments have different attitudes toward sharing economy. Some governments prohibit the sharing economy, while others support the provision of such services, and many cities simply do not take a clear stance on it (Hong and Lee Citation2018). As a potential solution to alleviate parking problems, shared parking may get support from Chinese government. Whether the support of Chinese government has an influence on owners’ decisions is thus investigated. Media may have a similar persuasive or discouraging power. For example, some smokers decide to quit smoking after seeing reports about its harmful effects (Durkin, Brennan, and Wakefield Citation2012). Therefore, we assume that social media may also affect owners’ participation in shared parking. As a third-party company, the shared parking platform needs charging a proportion of the fees paid by users to guarantee ongoing development of the platform. We set four levels from 0% to 45% to vary the fees that owners need to pay. These seven attributes describe a specific context and are called context variables. Apart from these context variables, the attributes of alternatives also influence owners’ decisions. The contract period in fixed mode, the revenue from shared parking and the probability of earning that amount of revenue were selected as alternative-specific variables. As literally, contract period means the duration of the signed parking space sharing contract. The revenue from shared parking refers to the monthly amount that owners can earn from sharing parking space out. The probability corresponds to the revenue in the sense that a certain amount of revenue can be received with a certain probability. In total, 12 attributes were selected for the choice experiment (). Since the demand for shared parking is uncertain, the revenue generated is also uncertain. The levels of these attributes were defined according to the state of the practice in developing shared parking schemes in China (Report of China’s shared parking industry analysis and investment strategy Citation2019) and the current parking situation in Qingdao, China (Traffic yearbook of Shandong province Citation2019). Because the revenue from shared parking is uncertain, we systematically varied the values of the revenue and the probability of getting that amount of revenue.
Table 2. Attributes and attribute levels.
The attributes and attribute levels listed in lead to a 22 × 410 full factorial design. To reduce the number of combinations to a more manageable size without losing essential information, an orthogonal main effect design can be developed assuming interactions are negligible. In this paper, an orthogonal fractional factorial design consisting of 64 choice sets was created, which ensures that the attributes presented to individuals are varied independently of one another. Moreover, an orthogonal blocking strategy was part of the design generation process to assign subsets of treatment combinations to respondents. The 64 choice sets were blocked into 16 subsets. Each subset consists of 4 treatments and was randomly assigned to a respondent. A screenshot of an example choice task is shown in .
Figure 1. A screenshot of an example choice task.
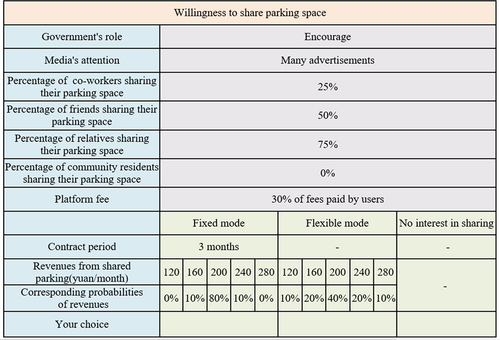
In order to help respondents better understand the experiment, an example was shown to respondents as a task description before they started the real experiment. The meaning of the three alternatives and of every attribute, and the advantages and disadvantages of shared parking were carefully introduced in advance. The task description avoided any leading or suggestive answers and underlined the trade-offs and uncertainties involved. Respondents were informed that any other factor they may consider did not differ between the choice options.
Model specification
shows that the representation of the decision problem of parking space owners involves a set of contextual variables, one certain attribute of a choice option, and the uncertain generated revenue variable. Thus, we have a mixed decision problem. In a previous paper, we explored the performance of a prospect theoretic model. To further explore the performance of regret-based models, in this paper we modify different specifications of extant regret-based choice models and examine their performance. Different from other applications in transportation research, the key assumption underlying the tested models is that when making a choice under uncertainty, parking space owners trade off the utility they expect to derive from their choice and the anticipated regret (and rejoicing).
Hybrid expected utility-regret model
The first model we explore is a hybrid expected utility-regret model, which can be written as follows:
where E[] is the expected utility of the deterministic and stochastic terms of individual
for alternative
in choice situation
.
is the regret of individual
who chooses alternative
in choice situation
, and
is an error term.
consists of an alternative specific constant (
), the effects of effect-coded social-demographic variables (
), the effects of effect-coded context variables (
) and alternative-specific attributes (
), one being uncertain (
) and the other being certain (
).
,
and
respectively denote their corresponding parameters that need to be estimated. Since each respondent was required to complete multiple-choice tasks, panel effects were estimated, which were varying across alternatives and respondents but invariant within respondents.
The specification of the seminal random regret-only choice model in a risky choice context is as follows (Kim, Rasouli, and Timmermans Citation2017):
where means the outcome at the
th state of the world of chosen alternative
in choice situation
,
means the outcome at the
th state of the world of non-chosen alternative
in choice situation
,
is the parameter of regret,
indicates the probability that the
th state of the world of alternative
occurs in choice situation
,
indicates the probability that the
th state of the world of alternative
occurs in choice situation
.
The hybrid expected utility-regret-rejoice model
The assumption that choice behavior is only based on regret may be too rigorous in many decision contexts. Besides the emotion of regret, another emotion – rejoice – has triggered the interest of many researchers in recent years (Jang, Rasouli, and Timmermans Citation2017a, Citation2018a; Rasouli and Timmermans Citation2019; Zagonari Citation2019) and was also mentioned in the seminal work on regret theory. Rejoicing is the feeling that individuals experience when the chosen alternative indeed outperforms the non-chosen one(s).
Several specifications of regret-rejoice functions have been suggested in the literature. Bell (Citation1982) proposed an exponential function to account for risk avoiding behavior. It is graphed in . The exponential regret-rejoice function can be expressed as:
Figure 2. Graphical representation of the four regret-rejoice functions.
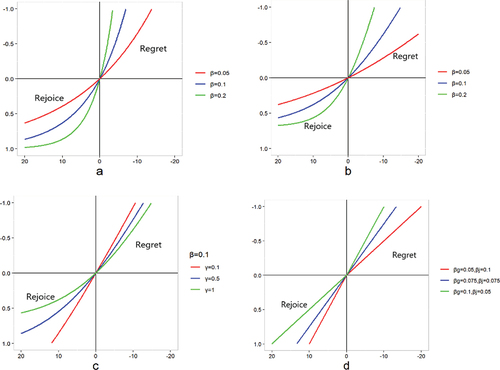
where is the parameter of regret-rejoice.
Based on the same assumption, Chorus (Citation2010) suggested a logarithmic function. Originally, it was introduced as a smoothing approximation of the regret model by Chorus, Arentze, and Timmermans (Citation2008). Later, it was argued that the part of the function when the considered alternative outperforms the alternative can be viewed as rejoice. In this paper, we subtract to ensure that regret and rejoice equal zero when the attribute levels of the compared alternative are the same. Note that this does not affect the estimated coefficients. Later in 2014, Chorus (Citation2014b) suggested a generalized logarithmic function in which the ‘1’ in the logarithmic function is replaced by regret-weight γ. The generalized logarithmic function can also be adjusted to ensure regret/rejoice is equal to zero in the absence of attribute differences by subtracting
. The logarithmic and generalized regret-rejoice functions are shown in, respectively, and can be written, respectively, as EquationEquations (5)
(5)
(5) and (Equation6
(6)
(6) ):
is a binary logit function of
to ensure that
lies between 0 and 1.
Note that the above specifications involve a single equation that applies to both the regret and the rejoice domain. In contrast, Rasouli and Timmermans (Citation2019) suggested to define rejoice as a (linear) function of the sum of attribute differences of the considered alternative against the second best alternative. Jang, Rasouli, and Timmermans (Citation2017a, Citation2018a) proposed to estimate a separate (non)linear function of attribute differences for the regret and rejoice domain. Considering the setup of the current study, these two proposals are identical. Also note that compared to the single function, these specifications offer more flexibility in capturing different choice mechanisms and principles. Assuming linear diverging functions in the regret and rejoice domain, graphs the regret-rejoice function. The model can be expressed as follows:
where is the rejoice of individual
who chooses alternative
in choice situation
,
is the regret of individual
who chooses alternative
in choice situation
,
is the parameter for rejoice, and
is the parameter for regret.
Elaborating these specifications and applying them to the study of decision-making under uncertainty, we propose a hybrid expected utility-regret-rejoice model that consists of a combination of utility, regret-rejoice, and random disturbance terms. The model can be expressed as follows:
The hybrid expected utility-regret-rejoice model considering perception
Most regret-rejoice models have been based on differences between the objective attributes of the choice alternatives (). In reality, regret and/or rejoice are, however, more likely based on the subjective perception of attribute differences. For example, the relative regret and/or rejoice the owner feels in the scenario where he/she gets 30Ұ and 60Ұ from the two options may be different from that when parking space owners get 330Ұ from one option and 360Ұ from the other. Based on psychophysical research, Jang, Rasouli, and Timmermans (Citation2017b) introduced psycho-physical mapping into regret – rejoice models. Later, to allow the variance in perception to vary with the size of attribute, Jang, Rasouli, and Timmermans (Citation2018b) put forward two possible functions. Applying the two functions to the regret-rejoice specification based on the linear split function gives:
respectively
EquationEquation (10)(10)
(10) indicates that the relationship between attribute intensity and the value of the power coefficient is symmetric around the Weber point.
and
are parameters to be estimated.
is calculated as the Weber point.
and
together determine the width of the curve. That is, the marginal change in perception for an attribute difference is the same for the same increase, respectively, decrease from the Weber point. EquationEquation (11)
(11)
(11) explores the possibility of asymmetric perception around the Weber point. Parameter
directly indicates the location of the Weber point. Parameter
decides the width of the curve and the degree of asymmetry: If it is estimated positive, individuals’ perception is more sensitive to the attribute intensities smaller than the Weber point. The graph of the power coefficient regarding attribute intensity is skewed on the left side of the Weber point. If negative, individuals’ perception is more sensitive to the attribute intensities bigger than the Weber point. The graph of the power coefficient regarding attribute intensity is skewed on the right side of the Weber point. In addition, if the absolute value of
is close to zero, the shape of the graph becomes flat and symmetric, meaning that individuals perceive attribute differences following the Weber’s law for most attribute intensities. When the absolute value becomes larger, individuals’ perception is only sensitive around the Weber point, and the perception is similar to the objective difference. It is worth noting that the asymmetric function is proposed to explore the possible asymmetry of individuals’ response to a certain central point in many real settings. However, the asymmetric function is not a generalized version of the symmetric function.
Results
Estimation results
The estimation results of random expected utility model (REUM), RRM, and hybrid expected utility-regret models are shown in . Results show that social influence significantly affects private owners’ intention to share private parking spaces. The influence is highest for community residents, followed by friends, coworkers, and relatives. The community residents as stakeholders may be influenced if people allow strangers to use their private parking space. The respondents therefore bear pressure from community residents. Regarding platform fee, results show that the estimated parameters systematically decrease with increasing fee. The estimated parameter for a fee of 45% is significantly negative at conventional levels. Moreover, results show that government’s role and media’s attention show significant effects on owners’ choices. This means actions like encouragement of government may enhance market confidence, which provides directions for shared parking operators to publicize government’s encouragement and even cooperate with government. May, Königsson, and Holmstrom (Citation2017) highlight ‘trust’ as a critical lever for making the sharing economy work. Liang, Eccarius, and Lu (Citation2019) also put forward similar views that the government’s guidance and development of relevant support measures will help suppliers, their relatives, and other community members to trust and approve the shared parking mechanism, and provide peace of mind to individuals who are willing to participate. Besides, the values of the alternative-specific constants are negative, which means that on average the respondents prefer not to share their parking space.
Table 3. Estimation results of the REUM, RRM, and hybrid expected utility-regret models.
The positive parameter for owners under 30 years old and the negative parameter for owners over 40 years old indicate that young owners are more willing to participate in shared parking than older owners. One of the reasons may be that young owners tend to be more willing to accept new things in general. Another reason may be young owners, who have not experienced long-term wealth accumulation, value the revenue from shared parking more than older owners. The third reason may be that many older owners are more reluctant to participate in APP-related and Internet-related projects because they are unfamiliar with the technology. Parameters are, respectively, negative and positive for male and female for the fixed mode, whereas they are exactly opposite for flexible modes, which implies that males favor the flexible mode over the fixed mode. According to the statistics from the Ministry of Public Security of China, in 2020, there were 308 million male drivers, accounting for 67.57%, and 148 million female drivers, accounting for 32.43% (Wang et al. Citation2021). Perhaps, the reason that males care more about flexibility is because they are the main car users. The estimated parameters for individual salary suggest that high-income owners are less interested in shared parking than low- and medium-income owners. It may be because parking space owners with low and medium salary are more interested in the extra revenue shared parking may bring, while parking space owners with high salary are more concerned about the hassle and inconvenience that comes with shared parking. Another interesting finding is that parking space owners whose youngest child is between 0 and 5 years old prefer the fixed mode. The reason may be that parking space owners with small kids have high opportunity costs in spending time on arranging flexible sharing agreements. As expected, the parameter for revenue shows that the more money shared parking can bring, the more parking space owners tend to engage in shared parking. Parameters of ‘contract period’ are not significant for the current sample size.
Because we compare non-nested models with a different number of estimated parameters, Ben-Akiva and Swait’s (Citation1986) was applied. It shows that the probability that the RRM outperforms the REUM is zero (), and the probability that the REUM is superior to the hybrid specification is also zero (
), with Φ being the standard normal cumulative distribution function. It means the hybrid expected utility-regret model has a higher explanatory power than RRM and REUM, and the RRM performs the worst of the three models. Empirical evidence about RRM has a somewhat weaker performance than utility theory when an ‘opt out’ option is presented to respondents can also be found in the previous research (Thiene, Boeri, and Chorus Citation2012; Hess, Beck, and Chorus Citation2014). As explained in a previous paper, the reason of RRM’s failure may be that when all the alternatives are comparable, the assumption of RRM that people make decision based on regret generated by comparison makes sense. However, ‘no-choice’ option cannot create regret since this alternative has no attribute in common and cannot be compared to other alternatives.
shows the estimation results of the four above mentioned hybrid expected utility-regret-rejoice specifications. Based on the results of Ben-Akiva and Swait’s (Citation1986), the probability that the hybrid expected utility-regret-only specification is superior to the hybrid expected utility-regret-rejoice specification that applying exponential regret-rejoice function is 0.011 (); the probability that the hybrid expected utility-regret-only specification is superior to the hybrid expected utility-regret-rejoice specification that applying logarithmic regret-rejoice function is 0.009 (
), and probability that the hybrid expected utility-regret-only specification is superior to the hybrid expected utility-regret-rejoice specification that applying generalized logarithmic regret-rejoice function is 0.014 (
); the probability that the hybrid expected utility-regret-only specification is superior to the hybrid expected utility-regret-rejoice specification that applying split linear split regret-rejoice function is 0.004 (
). We can draw the conclusion that the hybrid expected utility-regret-rejoice models are superior to the hybrid expected utility-regret-only model at the 95% significant level.
Table 4. Estimation results of the hybrid expected utility-regret-rejoice model.
Results show that the four specifications, especially the first three specifications, have similar performance. The closer the value of is to 1, the closer the results of the logarithmic function and the generalized logarithmic function. When the estimated value of
is 2.076, then the value of
equals to 0.889.
shows the estimation results of regret-rejoice specification based on linear split function considering perceptual mapping. Based on Ben-Akiva and Swait’s (Citation1986), the probability that the regret-rejoice function outperforms its specification by taking symmetry perceptual mechanism into consideration is zero (). Also, the probability that this specification is superior to the specification that includes asymmetric perception is also zero (
). However, different from Jang, Rasouli, and Timmermans (Citation2017b, Citation2018b) whose results show that the asymmetric perception function is superior to the symmetric perception function, the results of this paper find that the two functions perform similarly, and even the symmetric perception function slightly outperforms the asymmetric perception function.
Table 5. Estimation results of the regret-rejoice function considering symmetric and asymmetric perception.
Validation results
The -fold cross-validation method is used to calculate the prediction power of the models. The lower is
the more biased the estimates; the higher is
the larger the estimate variability. An important aspect of
-fold cross-validation is to find the optimal value for
.
=10 and
= 20 have been verified to work the best for small datasets (Dhurandhar and Dobra Citation2008). In this study, the data were randomly split into 10 different subsets. Observations sharing the same respondent ID were put in the same fold (four folds with 244 observations and six folds with 240 observations). The models were estimated by pooling nine of these subsets and then were applied to predict the observations of the remaining one subset. By repeating this procedure 10 times, each subset is used as a test set once. The overall accuracy is evaluated by averaging the accuracy values produced by all 10 folds.
shows the cross-validation test results of each fold for all models, in which a few fluctuations can be observed. A larger value indicates a higher predictive power. shows the average number of correctly predicted cases among different models. Although there are no significant differences among the models, results of reinforce the findings that taking the emotions of regret and rejoice, and the perception of attribute differences into consideration improves the predictive power of choice models. Thus, it can be ruled out that a peculiar subset or peculiar respondent causes the improvement in predictive success of the original regret model.
Figure 3. The number of correctly predicted cases for 10-fold cross-validation test.
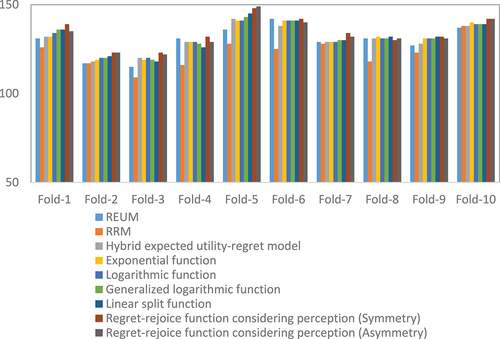
Table 6. The average number of correctly predicted cases among different models.
Conclusions
Shared parking takes advantage of the fact that most parking spaces are only used during certain times of the day because activity patterns follow daily, weekly, and annual cycles. To develop effective marketing strategies for shared parking, this study designed a stated choice experiment to identify private parking space owners’ propensity to engage in shared parking schemes and investigated various theoretical choice models under uncertainty.
Results show that that socio-demographic characteristics, context variables, and expected revenues are all important factors in explaining owners’ choice behavior. The findings have practical and policy implications for the success and future growth of the shared parking industry. For example, the results of the estimated models indicate that low- and middle-income, young owners are the best target market. In addition, results indicate that at some level platform fees become prohibitive to become engaged in shared parking. At the initial stage, operators may attract owners by asking zero or low introductory platform fees or introducing other incentives. When the market share reaches a certain level, operators can adjust this strategy to enhance their profit. Operators can also rely on social influence as it seems to play a significant role in the diffusion of shared parking. The high influence of community residents can inspire operators to do marketing activities in communities to dispel residents’ doubts and encourage them to participate in, thereby driving more owners to join. It also seems beneficial to promote shared parking by cooperating with government and invest in advertising. In addition to expressing support attitude to give confidence to the market, the government can also implement demonstration projects of shared parking and broadcasted its positive effects to the public via social media. To many people, shared parking requires a change in the way of their parking behavior. Naturally, people feel nervous about it, and they are reluctant to alter their behavior. Successful demonstration projects can eliminate anxieties of parking space owners.
This study also compared the REUM, RRM, and hybrid expected utility-regret models and found the less outperformed pure models, although the differences were small. By incorporating rejoice, empirical results show improved performance of the models. The best results were obtained when in addition a perceptual mapping function was introduced, which significantly enhances the explanatory power. From a methodological perspective, another contribution of the research would be to adopt different specifications of extant regret-based choice models and examine their performance.
The results of this paper are just a preliminary step. We plan to explore several directions for subsequent analyses in the future. One is investigating the effects of unobserved variables, such as decision-makers’ latent attitudes and personality traits, by hybrid choice model. Another intended analysis is to analyze the family decision, which requires an extension of these models to the case of household decisions under uncertainty.
Acknowledgments
This research is jointly supported by the China Scholarship Council (China) and the Urban Planning and Transportation Group, Eindhoven University of Technology (the Netherlands).
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Abbott, N. T., and A. Y. Bigazzi. 2017. “Utilizing Shared Parking to Mitigate Imbalanced Supply in a Dense Urban Neighborhood: Case Study in Vancouver, British Columbia, Canada.” Transportation Research Record 2651 (1): 92–100. doi:10.3141/2651-10.
- Ardeshiri, A., F. Safarighouzhdi, and T. H. Rashidi. 2021. “Measuring Willingness to Pay for Shared Parking.” Transportation Research Part A: Policy and Practice 152: 186–202.
- Bell, D. E. 1982. “Regret in Decision Making under Uncertainty.” Operations Research 30 (5): 961–981. doi:10.1287/opre.30.5.961.
- Ben-Akiva, M., and J. Swait. 1986. “The Akaike Likelihood Ratio Index.” Transportation Science 20 (2): 133–136. doi:10.1287/trsc.20.2.133.
- Caiati, V., S. Rasouli, and H. J. P. Timmermans. 2020. “Bundling, Pricing Schemes and Extra Features Preferences for Mobility as a Service: Sequential Portfolio Choice Experiment.” Transportation Research Part A: Policy and Practice 131: 123–148.
- Chorus, C. G., T. A. Arentze, and H. J. P. Timmermans. 2008. “A Random regret-minimization Model of Travel Choice.” Transportation Research Part B: Methodological 42 (1): 1–18. doi:10.1016/j.trb.2007.05.004.
- Chorus, C. G. 2010. “A New Model of Random Regret Minimization.” European Journal of Transport and Infrastructure Research 10 (2): 181–196.
- Chorus, C. G. 2014a. “Benefit of Adding an Alternative to One׳ S Choice Set: A Regret Minimization Perspective.” Journal of Choice Modelling 13: 49–59. doi:10.1016/j.jocm.2014.04.001.
- Chorus, C. G. 2014b. “A Generalized Random Regret Minimization Model.” Transportation Research Part B: Methodological 68: 224–238. doi:10.1016/j.trb.2014.06.009.
- Dhurandhar, A., and A. Dobra. 2008. Insights into Cross Validation.
- Durkin, S., E. Brennan, and M. Wakefield. 2012. “Mass Media Campaigns to Promote Smoking Cessation among Adults: An Integrative Review.” Tobacco Control 21 (2): 127–138. doi:10.1136/tobaccocontrol-2011-050345.
- Hao, J., J. Chen, and Q. Chen. 2019. “Floating Charge Method Based on Shared Parking.” Sustainability 11 (1): 72. doi:10.3390/su11010072.
- Hess, S., M. J. Beck, and C. G. Chorus. 2014. “Contrasts between Utility Maximization and Regret Minimization in the Presence of Opt Out Alternatives.” Transportation Research Part A: Policy and Practice 66: 1–12.
- Hong, S., and S. Lee. 2018. “Adaptive Governance, Status Quo Bias, and Political Competition: Why the Sharing Economy Is Welcome in Some Cities but Not in Others.” Government Information Quarterly 35 (2): 283–290. doi:10.1016/j.giq.2018.02.001.
- Jang, S., S. Rasouli, and H. J. P. Timmermans. 2017a. “Incorporating Rejoice in Random Regret Choice Models: Specification and Performance Assessment in Context of Travel Mode Choices.” The 96th Annual Meeting of the Transportation Research Board, Washington, DC, USA.
- Jang, S., S. Rasouli, and H. J. P. Timmermans. 2017b. “Incorporating Psycho-physical Mapping into Random Regret Choice Models: Model Specifications and Empirical Performance Assessments.” Transportation 44 (5): 999–1019. doi:10.1007/s11116-016-9691-9.
- Jang, S., S. Rasouli, and H. J. P. Timmermans. 2018a. “Tolerance and Indifference Bands in Regret–Rejoice Choice Models: Extension to Market Segmentation in the Context of Mode Choice Behavior.” Transportation Research Record 2672 (47): 23–34. doi:10.1177/0361198118787629.
- Jang, S., S. Rasouli, and H. J. P. Timmermans. 2018b. “Asymmetric Impact of Perception of Attribute Differences: Random Regret-based Approach.” The 97th Annual Meeting of the Transportation Research Board, Washington, DC, USA.
- Kim, J., S. Rasouli, and H. Timmermans. 2014. “Expanding Scope of Hybrid Choice Models Allowing for Mixture of Social Influences and Latent Attitudes: Application to Intended Purchase of Electric Cars.” Transportation Research Part A: Policy and Practice 69: 71–85.
- Kim, O. T. T., N. D. Tri, N. H. Tran, and C. S. Hong. 2015. “A Shared Parking Model in Vehicular Network Using Fog and Cloud Environment.” In: 17th Asia-Pacific Network Operations and Management Symposium (APNOMS), pp.321–326.
- Kim, J., S. Rasouli, and H. J. P. Timmermans. 2017. “Satisfaction and Uncertainty in Car-sharing Decisions: An Integration of Hybrid Choice and Random Regret-based Models.” Transportation Research Part A: Policy and Practice 95: 13–33.
- Lalani, N. 1984. “Evaluating Shared Parking for New Developments.” Public Works 115 (2).
- Liang, J. K., T. Eccarius, and C. C. Lu. 2019. “Investigating Factors that Affect the Intention to Use Shared Parking: A Case Study of Taipei City.” Transportation Research Part A: Policy and Practice 130: 799–812.
- Loomes, G., and R. Sugden. 1982. “Regret Theory: An Alternative Theory of Rational Choice under Uncertainty.” The Economic Journal 92 (368): 805–824. doi:10.2307/2232669.
- May, S., M. Königsson, and J. Holmstrom. 2017. Unlocking the Sharing Economy: Investigating the Barriers for the Sharing Economy in a City Context. First Monday.
- Rasouli, S., and H. J. P. Timmermans. 2019. “Covariates-dependent Random Parameters Regret–Rejoice Models of Choice Behavior: Specification and Performance Assessment Using Experimental Design Data.” Transportmetrica A: Transport Science 15 (2): 485–525. doi:10.1080/23249935.2018.1506524.
- Report of China’s Shared Parking Industry Analysis and Investment Strategy. 2019. “Huajing-Research (In Chinese).”
- Schlagwein, D., D. Schoder, and K. Spindeldreher. 2020. “Consolidated, Systemic Conceptualization, and Definition of the “Sharing Economy.” Journal of the Association for Information Science and Technology 71 (7): 817–838. doi:10.1002/asi.24300.
- Thiene, M., M. Boeri, and C. G. Chorus. 2012. “Random Regret Minimization: Exploration of a New Choice Model for Environmental and Resource Economics.” Environmental and Resource Economics 51 (3): 413–429. doi:10.1007/s10640-011-9505-7.
- Traffic yearbook of Shandong province. 2019. “China Statistics Press, Beijing (In Chinese).”
- Van Cranenburgh, S., C. A. Guevara, and C. G. Chorus. 2015. “New Insights on Random Regret Minimization Models.” Transportation Research Part A: Policy and Practice 74: 91–109.
- Wang, X., J. Li, R. Bian, and Y. Zhou. 2021. “Commuting Behavior Changes in Post-pandemic Period: A Case Study of Shanghai during COVID-19.” The 100th Annual Meeting of the Transportation Research Board, Washington, DC, USA.
- Xiao, H., M. Xu, and Z. Gao. 2018. “Shared Parking Problem: A Novel Truthful Double Auction Mechanism Approach.” Transportation Research Part B: Methodological 109: 40–69. doi:10.1016/j.trb.2018.01.008.
- Yan, Q., T. Feng, and H. J. P. Timmermans. 2020. “Investigating Private Parking Space Owners’ Propensity to Engage in Shared Parking Schemes under Conditions of Uncertainty Using a Hybrid Random-parameter Logit-cumulative Prospect Theoretic Model.” Transportation Research Part C: Emerging Technologies 120: 102776. doi:10.1016/j.trc.2020.102776.
- Yan, P., X. Cai, D. Ni, F. Chu, and H. He. 2021. “Two-stage Matching-and-scheduling Algorithm for Real-time Private Parking-sharing Programs.” Computers & Operations Research 125: 105083. doi:10.1016/j.cor.2020.105083.
- Zagonari, F. 2019. “Learning and Dynamic Choices under Uncertainty: From Weighted Regret and Rejoice to Expected Utility.” Managerial and Decision Economics 40 (3): 292–308. doi:10.1002/mde.3002.
- Zhang, W., F. Gao, S. Sun, Q. Yu, J. Tang, and B. Liu. 2020. “A Distribution Model for Shared Parking in Residential Zones that Considers the Utilization Rate and the Walking Distance.” Journal of Advanced Transportation 2020: 1–11.