
ABSTRACT
Magnetorheological fluid (MRF) has shown its great potential in the development of large mechanical devices, such as dampers, shock absorbers, rotary brakes, clutches, and prosthetic joints. Recently, more research focus has been invested on using MRF to develop soft, stretchable, and miniaturized devices with variable stiffness for realizing functionalities that cannot be achieved using solid smart materials. Here, based on liquid metal magnetoactive slurries (LMMS), a variable stiffness wire with excellent electrical conductivity is demonstrated. Without exposure to a magnetic field, the LMMS wire has an extremely low stiffness, and can be easily stretched while maintaining an excellent electrical conductivity. When applying a magnetic field, the wire becomes much stiffer and can retain its shape even under a load. The combination of properties of flexibility, high electrical conductivity, and variable stiffness of the wire is harnessed to make a flexible gripper that can grasp objects of various shapes. Moreover, by using gallium instead of its liquid metal alloys, the tunable stiffness range of the LMMS wire is significantly enhanced and can be controlled using both external magnetic fields and temperature-induced phase change. The presented LMMS wire has the potential to be applied in flexible electronics, soft robotics and so on.
GRAPHICAL ABSTRACT
1. Introduction
Magnetorheological fluid (MRF) is one of the renowned members of intelligent material family for its reversible and rapid transition from a liquid to a nearly solid state under the presence of external magnetic fields [Citation1,Citation2]. These fluids are prepared by dispersing magnetic microparticles into a carrier fluid. These fluids can exhibit changes in apparent viscosity of several orders of magnitude under magnetic fields with large flux densities around 1 T [Citation3]. MRF has gained much popularity because of its unique advantages, such as fast response, dramatic rheology change, insensitive to contamination, and easy preparation procedure [Citation1]. Due to the appealing characteristics of MRF, it is widely used in the development of dampers [Citation4], shock absorbers [Citation5], rotary brakes [Citation2], clutches [Citation6,Citation7], prosthetic devices [Citation8], polishing and grinding devices [Citation9], and so on. However, until now, limited research has reported stiffness changing conductive wires based on MRF, which has the potential to replace the traditional rigid wires and promote the development of stretchable electronics and soft robotics. This is largely because most of currently used carrier fluids for MRF is nonconductive.
Gallium (Ga) and several of its alloys are liquid metals (LM) at or near room temperature, such as EGaIn (75 wt% gallium, 25 wt% indium) and Galinstan (68.5 wt% gallium, 21.5 wt% indium, 10 wt% tin) [Citation10]. They have high electrical and thermal conductivities, large surface tension, and low toxicity compared with mercury [Citation11], and these properties make them attractive for realizing applications in flexible devices such as stretchable electronics [Citation12,Citation13], heat flow management [Citation14–16], energy harvesting [Citation17–19], and soft actuators [Citation20–23]. Recently, LM-based magnetoactive slurries (LMMS) formed by dispersing magnetic iron (Fe) particles in a Ga-based LM matrix has been reported. The stiffness of the LMMS materials systems can be reversibly altered and subtly controlled within a short time and over a wide range [Citation24]. Magnetic LM has been applied to realize 3D droplet manipulation [Citation25] and make phase transitional liquid grippers [Citation26]; however, its wider applications in tunable and flexible mechanical systems are yet to be explored.
Despite a previous reported liquid metal wire that can be manipulated into unique shapes by the synergistic effect induced by Lorentz force and Lenz’s law in a noncontact manner, variable stiffness wires have not been reported [Citation27].
Here, we reported a simple method for preparing variable stiffness wires based on LMMS with high electrical conductivity (σ = 1.13 × 106 S m−1 for mEGaIn: mFe = 3; compared with mercury σ = 1.04 × 106 S m−1, as shown in Table S1). When the magnetic flux density is low, the wire can be stretched to a large strain of 400% while maintaining its high electrical conductivity to stably connect electronic components. We also investigated the effect of magnetic particles on the conductivity and stretchability of the wire. When a magnetic field is applied, the stiffness of the wire increases significantly. Interestingly, the wire can retain its shapes in the magnetic field, even after loaded with weight. In order to highlight the application potential of the wire, we presented a gripper utilizing the stiffness changing capability of the wire for controlled grasping and releasing objects of various shapes. In addition, we further altered the property of the wire by replacing EGaIn with Ga in the LMMS, illustrating the ability for enhancing the range of tunable stiffness by inducing magnetorheological effect and temperature-controlled phase change.
2. Materials and methods
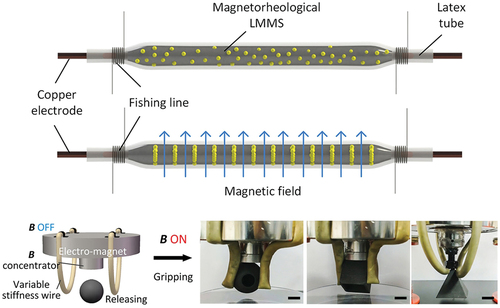
The variable stiffness wire consists of four major parts: LMMS, a latex tube, two copper (Cu) electrodes, and a fishing line. The role of each part is elaborated below..
LMMS: The LMMS is the core part of the wires as it provides variety in stiffness and maintains the shape. LMMS is formed by dispersing magnetic Fe particles (pure iron) in a Ga-based LM matrix, e.g. EGaIn (). Specifically, we prepared one kind of LMMS (mEGaIn: mFe = 3) by mixing 1 g of Fe microparticles (size of 5 μm) with 3 g of EGaIn in 5 mL of condensed hydrochloric acid (HCl) solution (12 M). We added them into a clean beaker and rigorously stirred the mixture for at least 10 minutes. The formation of intermetallic FeGa3 at the interface allows Fe particles to wet Ga in EGaIn [Citation28], thereby forming a homogeneous mixture (). Pure iron particles reacted with HCl solution in the agitating process. However, EGaIn and Fe particles formed a galvanic cell in HCl solution, and HCl reacts preferentially with Ga due to its low standard electrode potential, which prevented Fe particles from dissolving by HCl. Before using the mixture for making the variable stiffness wire, LMMS was cleaned and soaked in 100 mL of water for more than 3 times to remove HCl. After mixing with Fe particles, the low-viscosity EGaIn became thick, slurry-like, and muddy.
Figure 1. Variable stiffness wires based on LMMS. (a) Schematics showing the process for preparing the LMMS. (b) Schematic illustrating the stiffness changing mechanism of variable stiffness wire. (c) Stretching of variable stiffness wire in the energized state (in a strain of 400%). Scale bar, 1 cm. (d) Compressing of variable stiffness wires under non-magnetic and magnetic environment. Scale bar, 1 mm.
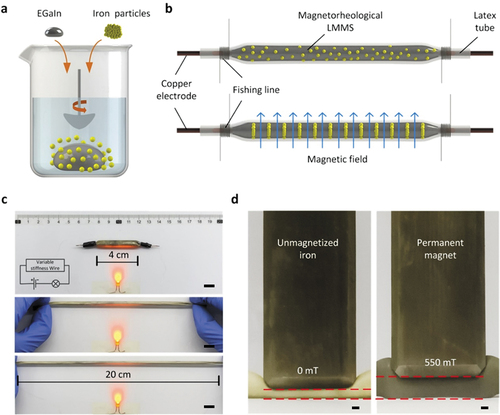
Latex tube: The latex tube was used as the casing of the wire and was filled with LMMS. In addition, the tube is soft and elastic, enabling LMMS to deform and maintain different shapes ().
Cu electrodes: We ensured an intimate connection between electrodes and LMMS, due to the excellent wetting performance between Cu and LM. One end of the electrode was connected to LMMS, and the other end is connected to external equipment.
Fishing line: We sealed the wire with fishing line, which is thin and durable. Tied tightly, a fishing line kept LMMS inside and fixed electrodes, preventing LMMS from leaking and electrodes from slipping off.
The variable stiffness wire possesses excellent electrical conductivity, flexibility, and the ability to change stiffness in a magnetic field. demonstrates the flexibility and electronic conductivity of the wire. We connected the circuit through the thin copper electrode to light up the LED and then stretched the wire (stretched from 4 to 20 cm); in the whole process of stretching, the brightness of the LED was almost unchanged. We further verified the tunable stiffness ability of the wire. As shown in , when we placed an unmagnetized Fe block (weight of ~2.5 kg) on the wire (diameter of 6 mm, filled with EGaIn-based LMMS), the flexible wire was instantly squashed, with a height change of ~77% observed (diameter decreased from 6 mm to 1.4 mm). When we replaced the Fe block with a magnetized one (surface magnetic flux density of 550 mT), the shape of the wire changed relatively insignificantly (~50%).
When we applied a magnetic field to the wire, Fe particles in the LMMS tend to be aligned along the direction of the applied magnetic field, as shown in . Such particle arrangement provides a mechanical adaptive response – i.e. gradually changes from random orientation to chains or column structures, and then rigid chains [Citation24]. As the appearance of rigid chains, the viscosity of LMMS increases, and the required shear force is also increased. We adopted this principle to control the stiffness of the wire. As the magnetic flux density increased, the stiffness of the wire increased.
3. Results and discussion
3.1. Investigating factors affecting the conductivity
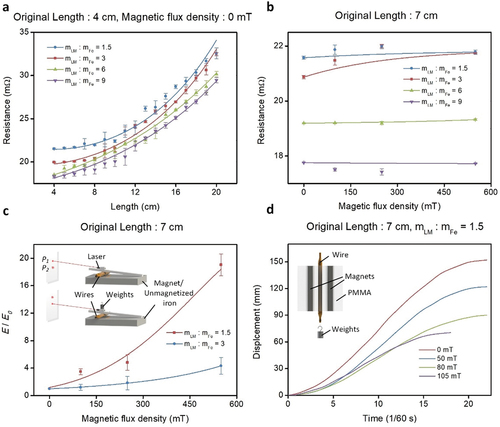
We first investigated the effects of stretching and magnetic fields on the conductivity of the wire (based on EGaIn). As shown in , when we stretched the wire from the original length of 4 cm to 20 cm, the resistance increased from ~20mΩ to ~30 mΩ. This is because stretching increases the length and reduces the diameter of the wire, resulting in an increase in resistance. It is worth noting that although stretching will cause an increase in the resistance of the wire, the value has always been at a low level. shows the resistance change of the wire when we applied fields with different magnetic flux densities, which may affect the arrangement of the Fe particles in the wire. We found that the wire resistance changes slightly upon increasing the magnetic flux density, and the mass ratio of liquid metal and Fe particles (mLM: mFe) affects the resistivity. The resistance gradually decreases as the ratio increases. This is because Fe has a higher electrical conductivity than that of EGaIn; therefore, adding more Fe particles would reduce the overall resistivity of the mixture.
Figure 2. Characterization of electrical conductivity and variable stiffness properties of wires. (a) Changes in the resistance with respect to stretch length. (b) Changes of the resistance with respect to magnetic flux density at different ratios of LM to Fe particles. (c) Changes of the stiffness with respect to magnetic flux density at different ratios of LM to Fe particles. Inset: setup of radial stiffness change measurement. (d) Changes of the stretchability of wires at different magnetic flux densities (applied weights of 50 g). Inset: setup of axial stiffness change measurement.
3.2. Investigating factors affecting the stiffness
Considering the difficulty and accuracy for directly measuring the wire stiffness, we adopt an indirect measurement method. We used permanent magnets with different surface magnetic flux densities to provide the magnetic field in the radial direction of wire, and used weights of different mass to compress the wire to the same deformation (radial direction of the wire), and use the weights mass ratio under the presence or absence of the magnetic field to qualitatively characterize the stiffness change. In addition, we applied a laser to amplify the deformation, as shown in the inset of . Improved stiffness was observed when we increased the magnetic flux density or the mass content of Fe (). We believe that either a greater magnetic flux density or a higher Fe particle content strengthens the chain-like structure of Fe particles, enhancing the stiffness of the wire. We further explored the influence of the radial magnetic field on the axial deformation of the wire, as shown in . We placed the wire in a uniform magnetic field and suspended a 50 g weight to provide a constant tension to stretch the wire. There is little friction between the wire and the channel that confined its position as we added lubricating oil to fill the gap. We observed that increasing the intensity of the magnetic field not only slows down the wire stretching speed, but also reduces the amount of wire deformation under the same tension.
3.3. Applications of the various stiffness wires
After examining the parameters affecting the various stiffness performance, we investigated the application of the wires in the fields of stretchable electronics and soft robotics. shows the display of ‘USTC’ using the LMMS wire in front of an electromagnet. The electromagnet is able to generate a 45 mT magnetic field to keep the wire in its shape by increasing the stiffness of the wire and generating larger friction between the wire and the electromagnet core. Even hanging a 50 g weight cannot change the shape of the wire. We applied lubricating oil to minimize the effect of friction to demonstrate that the change of stiffness is the dominant effect.
Figure 3. Examples of applications of the various stiffness wires. (a) Photographs of the shape maintaining ability of the LMMS wire under a magnetic field; (b) Photographs of on/off control of the circuit based on the variable stiffness wire; (c) Changes in the circuit current when pressure is applied on the wire. (d) Photographs of soft gripper based on various stiffness wires. Scale bars, 1 cm.
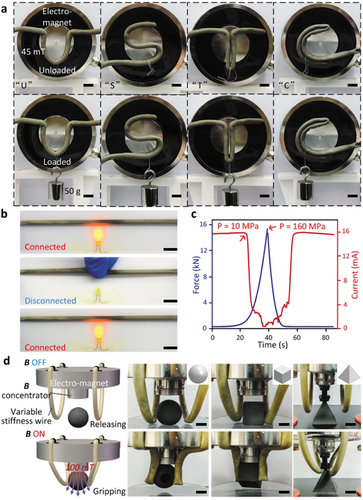
Moreover, the wire can be disconnected by changing the shape and separating the LMMS inside. Such a capability is demonstrated by pressing and rubbing the wire by hand to disconnect the circuit and releasing to reconnect (). A pressure of ~160 MPa is needed to bring the current to almost 0 mA ().
Based on the ferromagnetism and stretchability of the wire, we designed a soft gripper driven by an electromagnet. We placed two wires side by side directly below the electromagnet as the contact part of the gripper. When the electromagnet is ‘OFF,’ the wire hangs naturally (), when the electromagnet is switched to ‘ON,’ the wire not only shrinks upward, but also shrinks radially due to the larger magnetic flux density in the center area. During the shrinking process, the wire wraps the object to be clamped, and the stiffness of the wire keeps its shape and holds it firmly under the action of friction. The gripper based on the variable stiffness wire can be used to grip objects of various shapes, as shown in (also see Movie S1). Moreover, by precisely controlling the intensity of the magnetic field, our gripper has the potential to provide soft contacts to the gripped object [Citation29].
Taking advantage of the variable stiffness and conductive properties of wires, a self-propelled variable stiffness wire was proposed, as detailed in Supporting Information S1. This variable stiffness wire was connected into the circuit in series with a copper coil of thick wire (0.8 mm) and high number of turns (~800). The coil was wrapped around a plastic tube (which contained the variable stiffness wire) to avoid constraint of the stretchability of the wire. Also, we applied lubricating oil in the tube to minimize the effect of friction. Applying a current (~6 A) to the coil generated a magnetic field (~34 mT), thereby increasing the stiffness of the wire located at the center. Compared with the non-magnetic field environment, the elongation of the wire when a 200 g weight is suspended reduced from 48 mm to 41 mm, accounting for 15% of the original length.
In order to increase the variable stiffness range of the wire, we explored the use of Ga to replace EGaIn for improving the stiffness of the wire at room temperature. The Ga-based LMMS wire can change its stiffness by two ways: liquid-solid phase transition and magnetorheological effect. At room temperature, the solid-state Ga-LMMS behaved like Ga, and the wire was rigid. When we applied an induction heater to heat the wire to about 40°C, the solid-state Ga-LMMS in the wire quickly changed to liquid state, and the properties became similar with LMMS made with EGaIn. We can further apply magnetic field to tune the wire stiffness between the solid and liquid states.
We measured the Young’s modulus of the wire in different states by stretching and compressing. shows the tensile properties of Ga-based LMMS wires in solid state. In the tensile test, we found that with the same wire length and diameter, the larger the mass ratio (mGa: mFe), the larger the ultimate strength and the Young’s modulus. As the ratio increased from 1.5 to 5, the ultimate tensile stress increased from 10.17 MPa to 19.88 MPa. The compression experiments also verified this point (). In the return stage, the Young’s modulus was 434 MPa and 733 MPa for samples with ratios of 1.5 and 5, respectively. The trend of the wire stiffness change in the solid state is different from that in the liquid state. We believed that Fe particles can induce local stress around the particles that leads to the reduction of mechanical properties of the wire in solid state.
Figure 4. Characterization of mechanical properties of Ga-based LMMS wires. Stress–strain curves of the solid-state Ga-based LMMS wires with three different mass ratios under (a) tension and (b) compression. (c) Stress–strain curves of the liquid-state LMMS wires within magnetic fields of 0 mT and 300 mT under compression. The mass ratio is 1.5. (d) Stress–strain curves of the liquid-state LMMS wires with mass ratios of 1.5 and 3 under compression. The magnetic field is 300 mT. (e) Photographs showing disconnection and self-healing of the circuit based on the Ga-based LMMS wire. Scale bar, 1 cm.
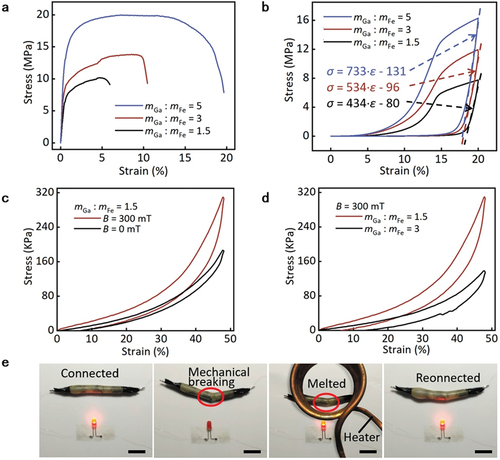
shows the compressive stress-strain curves of the wire at liquid state under different magnetic flux densities. We maintained the temperature at ~50°C using a contactless induction heater throughout the process to ensure the wires were at liquid state. At the same strain, the required stresses increased as the magnetic flux density increased (). shows the compressive stress-strain curves of the wire at liquid state under different mass ratios. At the strain of 48%, a decrease from 316 kPa to 142 kPa of the required stress of the wires was observed as the ratio increases.
The fluidic nature of Ga-based LM has been employed to make circuits with the self-healing ability [Citation12,Citation30]. As such, we also explored the self-healing ability of the Ga-based wire. To demonstrate this, we first connected the Ga-based wire to the circuit to light up a LED. Since the solid-state Ga-based LMMS inside the wire possesses high stiffness but rather fragile, the wire is vulnerable to mechanical deformations induced by external collisions (broken or crushed), causing disconnection of the circuit. However, this problem could be solved by heating the wire to introduce phase change of Ga fillers. LMMS melted into liquid state when it was heated to ~40°C and could smoothly flow and merge to heal the circuit due to the fluidity of liquid metal under the action of gravity (). Additionally, since the addition of Fe particles allows the LM crystal to grow on the surface of the Fe particles, suppressing the supercooling of Ga [Citation26,Citation31–33], the wire can solidify at room temperature (~20°C).
4. Conclusions
In summary, this work presented a reversible variable stiffness wire based on liquid metal magnetoactive slurries. This kind of wire shows significant stiffness increase when exposed to magnetic fields, and the response is almost instant. The wire is highly flexible and has a high electrical conductivity, allowing it to be conductive even after being stretched by 400%. Upon exposure to a magnetic field, the wire can maintain the shape and withstand a low load without deformation. By using Ga to make the LMMS, the variation range of the wire stiffness can be further increased by inducing phase change. We further demonstrated the use of such wires for making a magnetically controlled gripper that can grasp objects of various shapes. The presented LMMS wires have good flexibility, high electrical conductivity, and the ability to change its stiffness upon the application of stimuli, which possess the potential to pave the way for developing more complex smart materials enabled flexible functional devices in the future.
5. Experimental section
Materials: EGaIn, Galinstan and gallium were purchased from Santech Materials Co., Ltd. The Cu pads and wires were purchased from Yuandelai Industrial Materials Co., Ltd (China). HCl was purchased from Aladdin (China). The weights were purchased from Yanheng (China). The DC voltage was provided by a DC power supply (RIGOL DP832).
Videos and Photos: Video was captured using the rear camera of a smart phone (MI 8, Xiaomi, China), and the snapshots were extracted from these videos.
Variable stiffness wire-based gripper: The electromagnet was purchased from Yuqingshi KAKA Electrical Co., Ltd (China).
Switchable wire for LED lighting: The power of the induction heater is 2 kW.
Stress–strain curves measurement: The stress data was obtained using an electromechanical test system (Criterion® Model C43, MTS, USA).
Author contributions
Conceptualization, X.Z., J.S. and S.Z.; methodology, J.S.; validation, X.Z. and J.S.; formal analysis, X.Z.; supervision, S.T., W.L., X.L., and S.Z.; The manuscript was written through contributions of all authors. All authors have read and agreed to the published version of the manuscript. #These authors contributed equally.
Acknowledgment
The authors also thank Engineering Practice Center and Engineering Science Experimental Teaching Center, University of Science and Technology of China, for supporting in 3D printing serves.
Data availability statement
The data presented in this study are available on request from the corresponding author.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Ashtiani M, Hashemabadi SH, Ghaffari A. A review on the magnetorheological fluid preparation and stabilization. J Magn Magn Mater. 2015;374:716–730.
- Liu B, Li WH, Kosasih PB, et al. Development of an MR-brake-based haptic device. Smart Mater Struct. 2006;15:1960–1966.
- de Vicente J, Klingenberg DJ, Hidalgo-Alvarez R. Magnetorheological fluids: a review. Soft Matter. 2011;7:3701–3710.
- Ding Y, Zhang L, Zhu HT, et al. A new magnetorheological damper for seismic control. Smart Mater Struct. 2013;22:115003.
- Chooi WW, Oyadiji SO. Design, modelling and testing of magnetorheological (MR) dampers using analytical flow solutions. Comput Struct. 2008;86:473–482.
- Cha SW, Kang SR, Hwang YH, et al. Design and control of a parallel mechanism haptic master for robot surgery using magneto-rheological clutches and brakes. J Intell Mater Syst Struct. 2018;29:3829–3844.
- Rizzo R. An innovative multi-gap clutch based on magneto-rheological fluids and electrodynamic effects: magnetic design and experimental characterization. Smart Mater Struct. 2017;26:015007.
- Sassi S, Cherif K, Mezghani L, et al. An innovative magnetorheological damper for automotive suspension: from design to experimental characterization. Smart Mater Struct. 2005;14:811–822.
- Wang T, Cheng HB, Dong ZC, et al. Removal character of vertical jet polishing with eccentric rotation motion using magnetorheological fluid. J Mater Process Technol. 2013;213:1532–1537.
- Dickey MD. Stretchable and soft electronics using liquid metals. Adv Mater. 2017;29:1606425.
- Tang SY, Tabor C, Kalantar-Zadeh K, et al. Gallium liquid metal: the Devil’s Elixir. Annu Rev Mater Res. 2021;51:381–408.
- Markvicka EJ, Bartlett MD, Huang XN, et al. An autonomously electrically self-healing liquid metal-elastomer composite for robust soft-matter robotics and electronics. Nat Mater. 2018;17:618–624.
- Yun GL, Tang SY, Sun SS, et al. Liquid metal-filled magnetorheological elastomer with positive piezoconductivity. Nat Commun. 2019;10. DOI:10.1038/s41467-019-09325-4.
- Tang SY, Sivan V, Petersen P, et al. Liquid metal actuator for inducing chaotic advection. Adv Funct Mater. 2014;24:5851–5858.
- Shu J, Tang SY, Zhao SZP, et al. Rotation of liquid metal droplets solely driven by the action of magnetic fields. Appl Sci. 2019;9:1421.
- Deng YG, Jiang Y, Liu J. Low-melting-point liquid metal convective heat transfer: a review. Appl Therm Eng. 2021;193:117021.
- Zhang PP, Guo W, Guo ZH, et al. Dynamically crosslinked dry ion-conducting elastomers for soft iontronics. Adv Mater. 2021;33:2101396.
- Ma Z, Ai J, Shi Y, et al. A superhydrophobic droplet‐based magnetoelectric hybrid system to generate electricity and collect water simultaneously. Adv Mater. 2020;32:2006839.
- Zhang X, Ai J, Ma Z, et al. Liquid metal based stretchable magnetoelectric films and their capacity for mechanoelectrical conversion. Adv Funct Mater. 2020;30:2003680.
- Shu J, Ge DA, Wang EL, et al. A liquid metal artificial muscle. Adv Mater. 2021;33:2103062.
- Chrimes AF, Berean KJ, Mitchell A, et al. Controlled electrochemical deformation of liquid-phase gallium. ACS Appl Mater Interfaces. 2016;8:3833–3839.
- Tang SY, Khoshmanesh K, Sivan V, et al. Liquid metal enabled pump. Proc Natl Acad Sci U S A. 2014;111:3304–3309.
- Cole T, Tang SY. Liquid metals as soft electromechanical actuators. Mater Adv. 2022;3:173–185.
- Ren L, Sun SS, Casillas-Garcia G, et al. A liquid-metal-based magnetoactive slurry for stimuli-responsive mechanically adaptive electrodes. Adv Mater. 2018;30:1802595.
- Hu L, Wang HZ, Wang XF, et al. Magnetic liquid metals manipulated in the three-dimensional free space. ACS Appl Mater Interfaces. 2019;11(8):8685–8692.
- Wang HZ, Chen S, Li HW, et al. A liquid gripper based on phase transitional metallic ferrofluid. Adv Funct Mater. 2021;31:2100274.
- He Y, Tang J, Kalantar-Zadeh K, et al. Noncontact rotation, levitation, and acceleration of flowing liquid metal wires. Proc Natl Acad Sci U S A. 2022;119. DOI:10.1073/pnas.2117535119.
- Cui YT, Liang F, Xu S, et al. Interfacial wetting behaviors of liquid Ga alloys/FeGa3 based on metallic bond interaction. Colloids Surf A. 2019;569:102–109.
- Allioux FM, Han JL, Tang JB, et al. Nanotip formation from liquid metals for soft electronic junctions. ACS Appl Mater Interfaces. 2021;13:43247–43257.
- Guo R, Sun X, Yuan B, et al. Magnetic liquid metal (Fe-EGaIn) based multifunctional electronics for remote self-healing materials, degradable electronics, and thermal transfer printing. Adv Sci. 2019;6:1901478.
- Byun SH, Sim JY, Zhou ZA, et al. Mechanically transformative electronics, sensors, and implantable devices. Sci Adv. 2019;5(11):eaay0418.
- Zhang CL, Li L, Yang XH, et al. Study on the nucleating agents for gallium to reduce its supercooling. Int J Heat Mass Transfer. 2019;148:119055.
- Tang SY, Mitchell DRG, Zhao QB, et al. Phase separation in liquid metal nanoparticles. Matter. 2019;1:192–204.