

ABSTRACT
Dielectric elastomer actuators have attracted growing interest for soft robot due to their large deformation and fast response. However, continuous high-voltage loading tends to cause the electric breakdown of the actuator due to heat accumulation, and viscoelasticity complicates precise control. The snap-through bistability of the Venus flytrap is one of the essential inspirations for bionic structure, which can be adopted to improve the shortcoming of dielectric elastomer actuators and develop a new actuation structure with low energy consumption, variable configuration, and multi-mode actuation. Hence, in this paper, the structural design principles of electroactive bistable actuators are first presented based on the total potential energy of the structure. Following that, a feasible design parameter region is provided, the influence of crucial parameters on the actuation stroke, trigger voltage, and actuation charge are discussed. Finally, according to the coupling relationship between the bending stiffness and the bistable property of the actuator, the adjusting methods of bistable actuation are explored. A qualitative experiment was performed to verify the feasibility and correctness of the bistable design methodology and the actuation regulation strategy. This study provides significant theoretical guidance and technical support for developing and applying dielectric elastomer actuators with multi-mode, high-performance, and long-life characteristics.
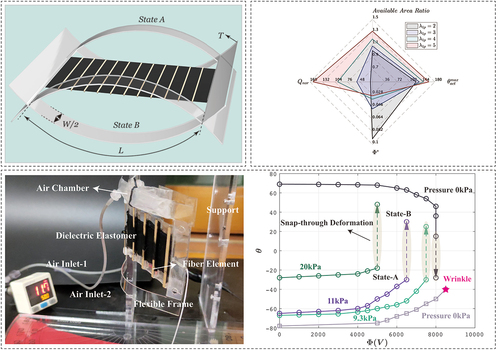
Graphical abstract
Acknowledgments
This work was supported by the National Key Research and Development Program of China (2019YFB1311600), Natural Science Foundation of China (Grant No. 11902248 and 52075411), Shaanxi Key Research and Development Program (2020ZDLGY06-11), and the State Key Laboratory for Strength and Vibration of Mechanical Structures (SV2018-KF-08).
Disclosure statement
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.