
ABSTRACT
The threat of slugging to production facilities has been known since the 1970s. This undesirable flow phenomenon continues to attract the attention of researchers and operators alike. The most common method for slug mitigation is by choking the valve at the exit of the riser which unfortunately could negatively affect production. The focus, therefore, is to satisfy the need for system stability and to maximize production simultaneously. Active feedback control is a promising way to achieve this. However, due to the complexity of multiphase flow systems, it is a challenge to develop a robust slug control system to achieve the desired performance using existing design tools. In this paper, a new general method for multiphase flow system stability analysis was proposed. Active feedback control was observed to optimize slug attenuation compared with manual choking. The use of soft sensors was believed to be desirable for the practical implementation of the proposed control technique.
1. Introduction
Oil and gas activities in many oil-producing nations of the world have shifted to deep offshore. Many of the fields are too small to accommodate a standalone offshore processing facility. Also, many of the existing fields are in plateau production phase; thus tying production pipelines from satellite fields to an existing one becomes very popular in order to use common offshore processing facility. The transportation of the produced crude is usually done in multiphase pipelines. In so doing, one of the challenges encountered is slugging. Slugging in oil and gas pipelines is a cardinal problem for all oil and gas producers. It is characterized by large pressure and production fluctuations.
One of the ways of suppressing or eliminating fluctuation due to slugging is by choking. In practice, oil and gas industry have used this method for many years to eliminate severe slugging by manipulating the valve opening at the exit of the riser, which unfortunately could negatively affect production (Taitel, Citation1986; Yocum, Citation1973). The use of controller, however, has been reported to be able to help alleviate this problem by stabilizing the system at larger valve opening (Ogazi, Citation2011). Significant efforts have been concentrated on modelling and understanding the slug attenuation mechanism for choking (Jansen & Shoham, Citation1994; Taitel, Citation1986) and active slug control (Hedne & Linga, Citation1990; Storkaas, Citation2005; Storkaas & Skogestad, Citation2003, Citation2007; Storkaas, Skogestad, & Godhavn, Citation2003). These models can be used to gain insight into the mechanism and control design. Nevertheless, these models may not accurately represent real systems due to the complexity of multiphase flow (Di Meglio, Kaasa, & Petit, Citation2009; Di Meglio, Kaasa, Petit, & Alstad, Citation2010; Di Meglio, Petit, Alstad, & Kaasa, Citation2012). This leaves the robustness of slug control systems designed based on these models questionable. There is, therefore, the need for a simple but yet robust methodology that can be used for system analysis and controller design. The aim of this study is to develop an approach to slug flow stability using feedback control. To achieve this aim, we propose a new method that can be used for slug flow stability analysis and design a controller for stabilizing the unstable slug flow. A theoretical analysis was attempted to show the slugging mitigation potential of active feedback control at larger valve opening when compared with traditional manual choking. This paper is organized as follows: in Section 2, the new approach to slug flow stability analysis is presented; in Section 3 numerical case study was performed and the work is concluded in Section 4.
2. Stability analysis of slug attenuation with feedback control
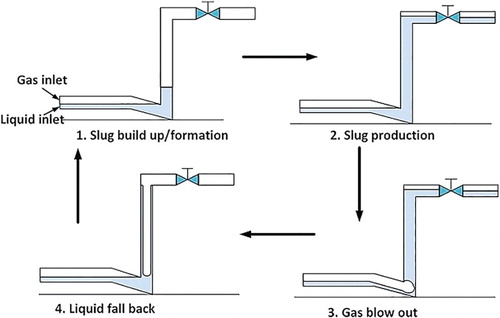
In the co-current flow of gas–liquid mixtures through pipeline-riser system, slugging is frequently encountered for a wide range of pipe inclinations and flow rates. Severe slugging is a flow regime which can be described as a four-stage transient cyclic phenomenon shown in . At low flow rate, the liquid accumulates at the riser base, blocking the gas flow while the riser column gets filled with liquid (slug formation stage); the gas is compressed in the upstream pipeline, causing a pressure build-up which later becomes sufficient to overcome the hydrostatic head in the riser, thereby forcing the liquid slug out of the riser (slug production stage). This is followed by a gas surge (gas blow out) and the remaining liquid in the riser fall back to the riser base (liquid fall back stage), which again starts the cycle (Taitel, Citation1986). Severe slugging usually manifests in significant fluctuation of flow and pressure. This instability is as a result of the upward multiphase flow in the riser and compressibility of gas. Due to these two factors (geometry and gas compressibility), any increment of gas flow can cause two opposite effects on the riser base pressure: positive and negative. The negative effect can make the system unstable if it is dominant.
Figure 1. Severe slugging mechanism.
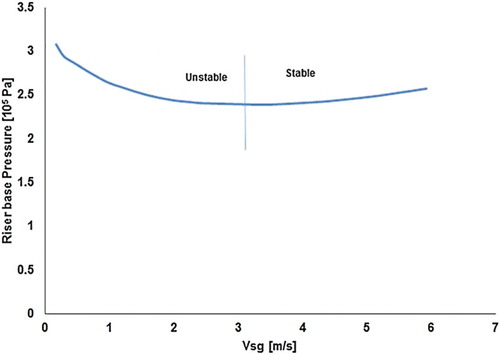
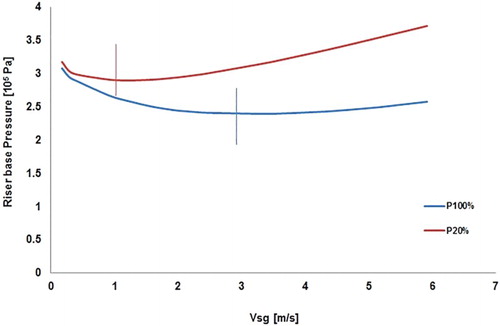
shows the general relationship between the riser base pressure and the gas flow rate for a given constant liquid flow rate. When the gas flow rate is low, which corresponds to a low friction loss, any increment in the gas flow rate will cause an increase in the gas–liquid ratio within the riser, hence results in a decrease in the riser base pressure. Conversely, when the gas flow rate is large enough (on the right-hand side of the vertical line in ), the friction loss becomes dominant; hence any increase in the gas flow rate will increase the friction loss and results in the riser base pressure increase. The region to the left and right of the minimum value represents the unstable flow and stable flow regimes as shown in . shows clearly that the system will be stable only at a considerably high gas flow rates. This is the bane of gas injection as a method for slug attenuation (Hill, Citation1990). An alternative method is, therefore, required for stabilizing the unstable system.
Figure 2. Stable and unstable regions for the riser base pressure as a function of gas flow rate.
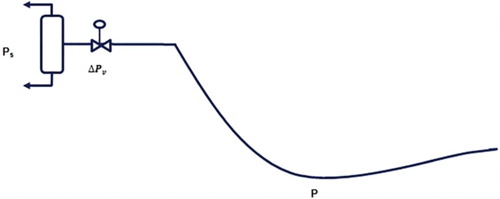
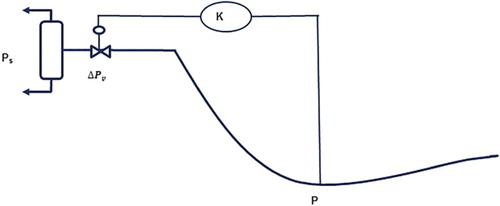
Considering a pipeline-riser system shown in , the riser base pressure depends on the liquid head, frictional head, acceleration head, and pressure drop across the valve and the separator pressure. This can be mathematically shown as follows:
(1)
where P is the riser base pressure; ΔPh, ΔPf, ΔPa, Ps and ΔPv are the hydrostatic head, frictional head, acceleration head, separator pressure and pressure drop across the valve, respectively.
Figure 3. Schematic of pipeline-riser system.
Assuming a constant liquid flow rate with small perturbation in gas flow rate, the sensitivity of riser base pressure to the perturbation in gas flow rate can be given as follows:
(2)
For the system to be stable, the sensitivity of riser base pressure to the change in gas flow rate must be positive as shown in (3).
(3)
The system will be unstable when the sensitivity is negative. The condition is given as (4).
2.1. Stabilizing the unstable slug flow regime with manual choking
Considering the pipeline-riser system shown in , under unstable behaviour, the system can be stabilized by choking the topside valve. This can be achieved by increasing the pressure drop across the valve.
shows a plot of pressure drop across the valve against the gas flow rate at constant liquid flow rate. The pressure drop across the valve was shown to increase as the gas flow increases for a constant valve opening. This relationship is shown in Equation (5). When the pressure drop across the valve is sufficiently large, the region of negative slope can be sufficiently made positive, as shown in .
Figure 4. Pressure drop across valve as a function of gas flow rate.
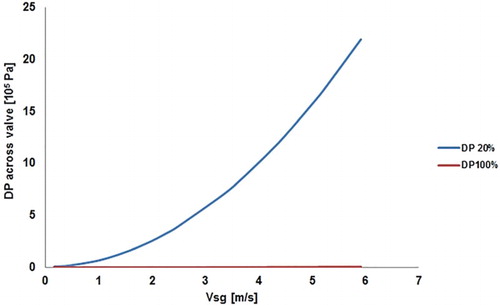
Figure 5. Use of choking to obtain stable flow.
The pressure drop across the valve in Equation (2) can be estimated using valve equation. Assuming linear valve characteristics, for a given liquid flow rate, the pressure drop across the valve can be given as follows:
(5)
where ρ is the density of fluid flowing through the valve (mixture density),
is the valve coefficient, u is the valve opening with values ranging between 0 and 1, and Q is the flow across the valve. The pressure drop across the valve is a function of the flow and the valve opening as shown in Equation (5). Therefore, at a given flow condition, severe slugging can be suppressed by manipulating the valve opening. This has been previously explored by many authors (Farghaly, Citation1987; Schmidt, Brill, & Beggs, Citation1979; Yocum, Citation1973); others developed bifurcation maps based on this concept and further designed controllers for slug attenuation (Ogazi, Citation2011; Ogazi, Cao, Yeung, & Lao, Citation2010; Ogazi, Ogunkolade, Cao, Lao, & Yeung, Citation2009; Storkaas, Citation2005).
If Equation (5) is differentiated with respect to Q keeping valve opening u constant (typical in manual choking), we have the following equation:
(6)
Substituting Equation (6) into Equation (2), the stability condition Equation (3) is equivalent to the following equation:
(7)
where
is a constant for a given flow condition and fixed pipeline structure.
This shows the condition under which manual choke valve would stabilize the unstable slug flow when the gas flow is perturbed. For this condition to hold, the valve opening must be considerably small, which means low flow through the valve. Due to this relationship, traditionally it was previously believed that the use of choking to achieve stability contributes largely to the high back pressure although some experimental and simulation works have demonstrated that this understanding was wrong (Yeung, Cao, & Adedigba, Citation2006; Yeung, Cao, & Lao, Citation2008). For the first time, the analysis presented here clearly shows that the use of choking to achieve stability is due to the increase in pressure sensitivity and not the pressure itself. This understanding is important for future development of slug mitigation approaches.
The riser base pressure increases as the pressure drop across the valve increases. Choking causes restriction to flow, which results in flow deceleration, thereby reducing the acceleration term during transient conditions. This is a side-effect of the use of choking to achieve stability and has been reported by many authors, including Yocum (Citation1973). Thus, reducing the pressure drop across the valve would be desirable as this would lead to increase in production. One of the ways to achieve this is to use a controller. Ogazi (Citation2011) has reported the ability of controller to help stabilize an open loop unstable system; however, no robust stability analysis was given for this benefit. We attempt to show this next.
2.2. Stabilizing the unstable slug flow regime with feedback controller
The production of system is directly associated with the riser base pressure (Equation (1)), while the stability is related to the pressure sensitivity, dP/dQ in Equation (2). Therefore, the aim of a slug control system can be translated as to achieve positive dP/dQ for a given flow condition with relatively low riser base pressure P. Under feedback control, in Equation (5) the valve opening u is not constant but varying as gas flow rate Q changes although the specific relationship between u and Q depends on the feedback law designed. Differentiating Equation (5), therefore, yields:
(8)
Comparing Equations (6) and (8), the second term of Equation (8) provides extra sensitivity to satisfy stable condition (Equation (3)). In other words, active slug control can achieve oil production higher than manual choking when severe slugging is eliminated. Equation (8) also suggests that to maximize oil production of a slug control system, the second term of Equation (8) should be maximized. This confirms that slug attenuation using choking can be more effective with the aid of controller compared with manual choking (Ogazi, Citation2011).
2.2.1. Design of active feedback controller
2.2.1.1. Bifurcation map
The first step in the design procedure is to establish the critical point after which a controller will be designed to stabilize the system in the open loop unstable region. The bifurcation map can be generated by keeping Q constant and varying u. The pressure sensitivity contributed by the valve to stabilize the system can be estimated at the critical valve opening using Equation (5).
2.2.1.2. Controller design
Considering a simple pipeline-riser system with feedback controller in , our goal is to control system response at larger valve opening. To achieve this, an extra pressure gradient must be introduced through feedback control to compensate for the gradient loss due to increased valve opening. Assuming the parameter of interest is the flow rate Q, for a slight perturbation in the gas flow rate, Q will deviate from set point Q0. We propose that Q can be driven to Q0 with a feedback controller of the form:
(9)
Figure 6. Pipeline-riser configuration with controlled choking.
Therefore, Equation (8) becomes
(11)
Therefore, the stability condition for feedback control is given as follows:
(12)
For a given M and a given valve opening u, there exists a value of K, which stabilizes the system. The condition also shows that a large value of K corresponds to a large valve opening u, hence will lead to increased oil production.
3. Numerical case study
In order to meet the objective of this study, numerical study on the stabilization of an unstable slug flow in pipeline-riser system was attempted.
3.1. Modelling and simulation of slug flow in a pipeline-riser system
LedaFlow (an industrial code) was used for the numerical investigation of a pipeline-riser system shown in . The system is a 17″ pipeline-riser system with 3.7 km horizontal pipeline leading to a 0.13 km riser. The fluid file used for the simulation was generated in PVTsim using the fluid compositions and properties shown in .
Figure 7. Geometry of pipeline-riser system.
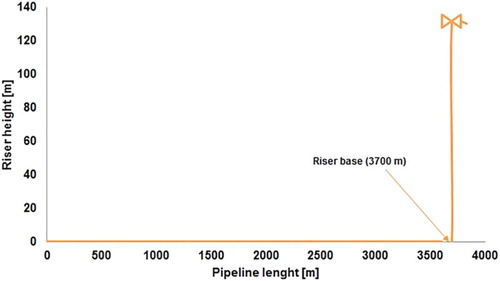
Table 1. Fluid properties.
The geometry was discretized and all the properties of material used for the pipes specified. shows the properties of materials used for the pipe in this study. A heat transfer coefficient of 10 W/m2 K and a pipe roughness value of 4.572e−5 m were used.
Table 2. Properties of pipe and insulation materials.
3.1.1. Mesh sensitivity studies
The accuracy and convergence of the solution depend largely on the mesh. The mesh size is also a very crucial factor in determining the computational time, which is a major issue in numerical simulations. Therefore, mesh sensitivity studies were carried out to identify the optimum mesh size required to obtain solution, which is not mesh dependent and at lowest possible computational cost. A case with 1800 cells was found to be the optimum mesh. This is in consonance with the suggestion in the online LedaFlow user manual that a mesh size of less than 5ID is fine enough for hydrodynamic slug study.
3.1.2. Stability curve
shows the average riser base pressure against the gas flow rate. The system was simulated for various gas flow rates at constant liquid flow rate of 119.16 kg/s.
Figure 8. Average riser base pressure against gas flow rate.
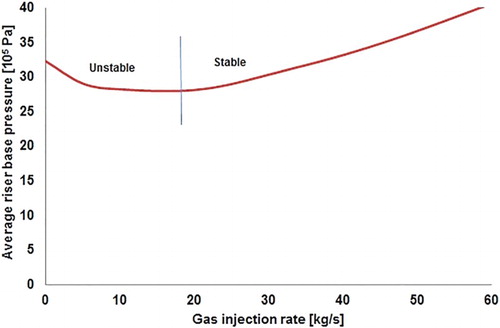
It is shown that, at this constant liquid flow, a gas flow rate (of 0.84 kg/s, corresponding to a gas mass fraction at 0.007) is in unstable region. It is shown from the map that about 20 kg/s gas flow rate will be needed to stabilize the system without choking. This is the bane of using gas injection as a slug mitigation technique (Jansen & Shoham, Citation1994). Following Equations (3), (6) and (7), it is proposed that when sufficient dP/dQ is added to the system such that total gradient is greater than zero, the system will become stable.
For a close look, shows that without any choking, that is, at 100% valve opening, around the operating point defined in , the local gradient (dP/dQ) was estimated as 14.29 bar/kgs−1. This is in consonance with Equation (4); thus the system is unstable. In this study, it is desired to stabilize the system around this operating condition. A slight perturbation (about 1%) in the gas flow rate around the operating point was introduced. From Equation (6), it was estimated that at least 14.29 bar/kgs−1 gradient must be supplied by the choke in order to stabilize the system at this operating condition such that Equation (7) is satisfied. This was achieved by choking and the corresponding bifurcation map is shown in .
Figure 9. Stability curve showing the operating condition.
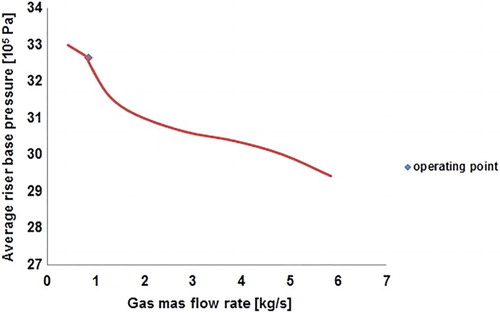
Figure 10. Riser base pressure against valve opening.
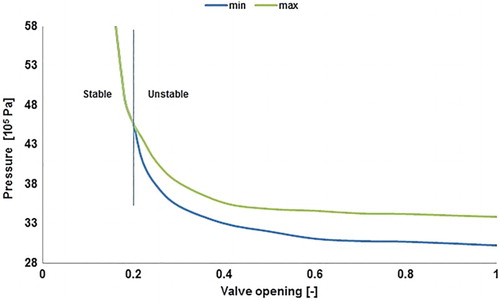
Table 3. Case study of typical slug flow condition.
3.1.3. Bifurcation map
The system was simulated for various valve openings and bifurcation map was generated for a typical slug flow for the boundary conditions shown in .
The valve was significantly choked to 20% opening to achieve stability by adding the required gradient to the system. This gradient was supplied by the pressure drop across the valve which added about 14 bar pressure to the system. It is desired to reduce the magnitude of this pressure so that the system pressure can be lowered for higher production.
3.2. Stabilizing the pipeline-riser system with feedback control
Having established the bifurcation point with manual choking and the pressure gradient contributed by the valve, the next goal is to control the system response at larger valve opening.
3.2.1. Slug controller design
It has been shown in Equation (8) that with the help of active control, a system can be stabilized at larger valve opening. In this study, we attempt to control the gas flow rate using a simple proportional controller. At 22% valve opening, for example, the gradient supplied at this valve opening was 10.71 bar/kgs−1, which was less than the required 14.29 bar/kgs−1. From Equation (8), it was shown that a controller can provide this shortfall. The gain required to meet this shortfall gradient was estimated from Equation (11). The minimum required gain required to stabilize our system at 22% valve opening was obtained as 0.0794.
3.2.2. Implementation of the active controller
The estimated controller gain 0.0794 was implemented using the inbuilt proportional controller structure in LedaFlow.
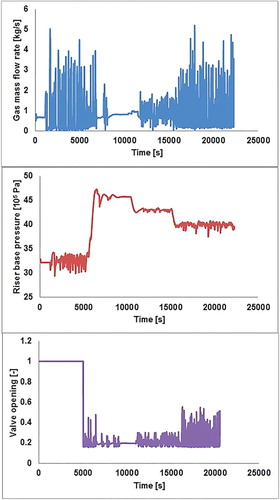
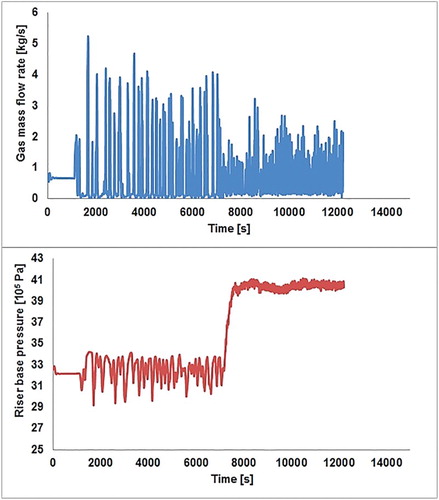
shows the system response to the application of control designed using the new method. The simulation was run for about 5000 s before the controller was introduced. The reference valve opening u0 was initially set at 20% valve opening, the controller was able to stabilize the system, and after 11,000 s, the reference valve opening was changed to 22% and the controller was still able to stabilize the system, but when u0 was opened beyond this value at 23% from 16,000 s, the system became closed loop unstable. A benefit of 5% reduction in the riser base pressure from 45.73 to 43.4 bar was recorded.
Figure 11. System response to active feedback control.
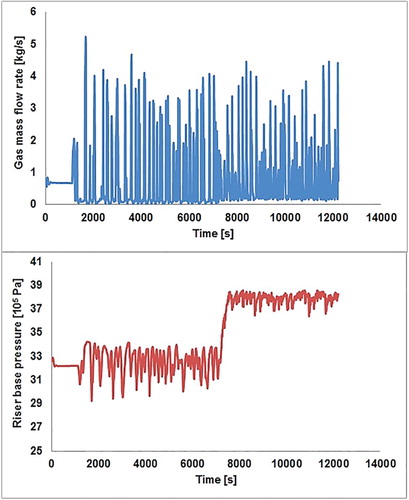
also shows the system response to the application of control designed using the new method. The estimated controller gain of 0.506402 was implemented using the inbuilt proportional controller structure in LedaFlow.
Figure 12. System response to active feedback control at 27% valve opening.
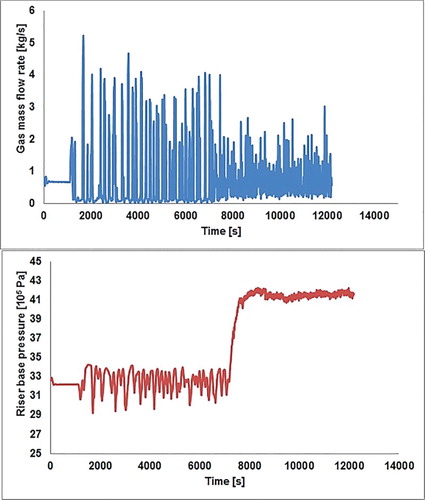
The simulation was run for about 7000 s before the controller was introduced. The controller was able to stabilize the system, around 27% valve opening resulting in a benefit of 9% reduction in the riser base pressure from 45.73 to 41.67 bar was recorded.
The proposed method was also used to design a controller and a gain of 0.533352 was obtained. shows the system response. The simulation was run for about 7000 s before the controller was introduced. The controller was able to stabilize the system, around 29% valve opening resulting in a benefit of 12% reduction in the riser base pressure from 45.73 to 40.26 bar was recorded.
Figure 13. System response to active feedback control at 29% valve opening.
shows the system response to a controller gain of 0.571793 designed based on the proposed method at 30% valve opening. The system is shown to be closed loop unstable at this valve opening. It thus appears that the controller was unable to provide the required gradient for stability at this valve opening.
Figure 14. System response to active feedback control at 30% valve opening.
3.2.3. Soft sensor approach to implementing the active controller
The method proposed in this study deals with the attenuation of slug flow using active feedback control with the aim of stabilizing the system at large valve opening. The method has been shown to achieve this aim considerably theoretically and numerically. However, in practice, the gas flow rate which was used to develop our control strategy might not be readily available or difficult to measure in typical industrial pipeline-riser system. One conceivable solution to this is to employ soft sensors.
Soft sensors are computer-based algorithms that mimic the hardware sensors. The soft sensor concept employs accessible online-data to estimate other variables which are difficult to measure or are not available. This concept has been previously deployed in industrial process monitoring (Kadlec, Gabrys, & Strandt, Citation2009; Qin, Citation2012) and in process control (Bolf, Mohler, Golob, Galinec, & Ivandic, Citation2009), and the inferential slug control invented in Cao, Lao, & Yeung (Citation2013). Soft sensors can be classified generally into: model-driven and data-driven. Model-driven soft sensors utilizes models obtained from first principle (mass or energy balances) and Kalman filter family belongs to this group. However, the development of model-driven soft sensors can be complex, difficult and time-consuming (Luttmann et al., Citation2012). The Partial least square or principal component analysis belong to the data-driven family and may generally be a preferred technique for soft sensors. The inferential slug control approach described in Cao et al. (Citation2013) is data-driven. The stability-analysis-based control design proposed in this work can be integrated with the inference slug control to provide robust and comprehensive slug mitigation solution for oil and gas industry.
4. Conclusion
The theoretical understanding of slug attenuation potential of active feedback control at large valve opening has been investigated. The following conclusions can be drawn from the study.
A new methodology for slug flow stability analysis has been reported.
Active feedback control helps maximize slug attenuation by optimizing the pressure drop across the valve compared with manual choking.
For the specific case study, additional 9% valve opening translating into 12% reduction in riser base pressure was achieved. This practically implies increase in oil production for the system.
With the help of a more robust controller, greater benefit might be achieved using the proposed method.
For practical implementation of the proposed method, a data-driven soft sensor technique would be valuable. This is a subject for further investigation.
Acknowledgements
The authors thank the Niger Delta Development Commission (NDDC), Nigeria, who supported the PhD of Adegboyega Ehinmowo.
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCiD
Adegboyega Bolu Ehinmowo http://orcid.org/0000-0002-2936-3353
References
- Bolf, N., Mohler, I., Golob, M., Galinec, G., & Ivandic, M. (2009). Software sensor for sulphur recovery unit control. Chemical Engineering Transaction, 17(3), 1191–1196.
- Cao, Y., Lao, L., & Yeung, H. (2013). Method, controller and system for controlling the slug flow of a multiphase fluid. UK Patent Application GB2468973.
- Di Meglio, F., Kaasa, G.-O., & Petit, N. (2009). A first principle model for multiphase slugging flow in vertical risers. Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference, Shanghai, China (pp. 8244–8251).
- Di Meglio, F., Kaasa, G., Petit, N., & Alstad, V. (2010). Model-based control of slugging flow: An experimental case study. American Control Conference (ACC), Baltimore, MD, USA (pp. 2995–3002).
- Di Meglio, F., Petit, N., Alstad, V., & Kaasa, G.-O. (2012). Stabilization of slugging in oil production facilities with or without upstream pressure sensors. Journal of Process Control, 22, 809–822. doi: 10.1016/j.jprocont.2012.02.014
- Farghaly, M. A. (1987). Study of severe slugging in real offshore pipeline riser-pipe system. 5th SPE Middle East Oil Show, Manama, Bahrain.
- Hedne, P., & Linga, H. (1990). Suppression of terrain slugging with automatic and manual riser choking. Advanced Gas-Liquid Flows, 155(19), 453–460.
- Hill, T. J. (1990). Gas injection at riser base solves slugging flow problems. Oil and Gas Journal, 26, 88–92.
- Jansen, F. E., & Shoham, O. (1994). Methods for eliminating pipeline-riser flow instabilities. SPE Western Regional Meeting, Long Beach, California, USA.
- Kadlec, P., Gabrys, B., & Strandt, S. (2009). Data-driven soft sensors in the process industry. Computers and Chemical Engineering, 33(4), 795–814. doi: 10.1016/j.compchemeng.2008.12.012
- Luttmann, R., Bracewell, D. G., Cornelissen, G., Gernaey, K. V., Glassey, J., Hass, V. C., … Mandenius, C. F. (2012). Soft sensors in bioprocessing: A status report and recommendations. Biotechnology Journal, 7(8), 1040–1048. doi: 10.1002/biot.201100506
- Ogazi, A. I. (2011). Multiphase severe slug flow control (PhD Thesis). Cranfield University, Bedfordshire, UK.
- Ogazi, A. I., Cao, Y., Yeung, H., & Lao, L. (2010). Slug control with large valve openings to maximize oil production. SPE Journal, 15(3), 812–821. doi: 10.2118/124883-PA
- Ogazi, A. I., Ogunkolade, S., Cao, Y., Lao, L., & Yeung, H. (2009). Severe slugging control through open loop unstable PID tuning to increase oil production. 14th International Conference on Multiphase Technology, Cannes, France (pp. 17–32).
- Qin, S. J. (2012). Survey on data-driven industrial process monitoring and diagnosis. Annual Rev in Control, 36(2), 220–234. doi: 10.1016/j.arcontrol.2012.09.004
- Schmidt, Z., Brill, J. P., & Beggs, H. D. (1979). Choking can eliminate severe pipeline slugging. Oil and Gas Journal, 12, 230–238.
- Storkaas, E. (2005). Stabilizing control and controllability: Control solutions to avoid slug flow in pipeline-riser systems (PhD Thesis). Norwegian University of Science and Technology, NTNU, Norway.
- Storkaas, E., & Skogestad, S. (2003). Cascade control of unstable systems with application to stabilization of slug flow. International symposium on advanced control of chemical processes AdChem’03, Hong Kong.
- Storkaas, E., & Skogestad, S. (2007). Controllability analysis of two-phase pipeline-riser systems at riser slugging conditions. Control Engineering and Practice, 15(5), 567–581. doi: 10.1016/j.conengprac.2006.10.007
- Storkaas, E., Skogestad, S., & Godhavn, J.-M. (2003). A low-dimensional dynamic model of severe slugging for control design and analysis. 11th International Conference on Multiphase flow (Multiphase 03), San Remo, Italy (pp. 117–133).
- Taitel, Y. (1986). Stability of severe slugging. International Journal of Multiphase Flow, 12(2), 203–217. doi: 10.1016/0301-9322(86)90026-1
- Yeung, H., Cao, Y., & Adedigba, A. G. (2006). The importance of downstream conditions on riser behaviour. Proceedings of the 5th North American conference on multiphase technology, Banff, Canada: 31 May–2 June 2006.
- Yeung, H., Cao, Y., & Lao, L. (2008). Comparisons between severe slug mitigation methods by increasing backpressure and throttling outlet valve. 6th North American Conference on Multiphase Technology, Banff, Canada (pp. 355–385).
- Yocum, B. T. (1973). Offshore riser slug flow avoidance: Mathematical models for design and optimization. SPE European Meeting, London, England.