
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
The efficiency of asynchronous motor is higher near the rated working point, but it will decrease significantly under light load. A hybrid search method is proposed to optimize the efficiency of asynchronous motor drive by current source at the light load operating condition. The approximate optimal flux is obtained according to the loss model method and the convergence speed is determined by the golden section method. Hybrid optimization control method has the advantages of fast response and global optimization of efficiency without relying on motor parameters. It not only shortens the search time but also effectively reduces the system loss. The control system stability is higher and the optimization performance has been significantly improved. The simulation results show that the hybrid search method has the advantages of fast optimization speed and good robustness. Especially under the condition of light load, the motor efficiency can be obviously improved.
1. Introduction
It is urgent to solve the energy problem in today's society. Motor and its system are widely used in industry, agriculture and people's daily life. And its power consumption is huge. Most motors are designed to operate under 50–100% rated load. However, asynchronous motors usually operate at maximum efficiency only when they are close to the rated load. Studies conducted by the Electric Power Research Institute show that more than 60% of industrial motors operate under 60% of the rated load capacity (Fernando & Anibal, Citation2008). In this case, the efficiency of the motor is very low. Therefore, it is of great significance to study how to improve the efficiency of asynchronous motors for saving energy and restraining environmental pollution (Bin & Qi, Citation2016). At present, various efficiency optimization methods of asynchronous motor can be summarized into two schemes: minimum loss model optimization control method (LMC) and power online search optimization control method (SC) (Baby & Shajilal, Citation2014; Bose, Citation2013; Peng & Xuan, Citation2017). LMC directly obtains the optimal excitation current by calculating, which has fast response speed but it requires precise motor parameters, in other words, it is highly dependent on motor parameters (Mei & Lin, Citation2010; Xu & Shao, Citation2010). SC does not require the parameters information of the motor, and has strong robustness to parameter changes, but the algorithm has a long convergence time (Li, Zhang, & Cui, Citation2010; Zhang, Wen, & Zheng, Citation2007). Aiming at vector control system of current-mode variable frequency asynchronous motor, a hybrid efficiency optimization control scheme combining the advantages of LMC and SC is proposed. It solves the problem that the traditional LMC is greatly affected by the variation of motor parameters and the optimization accuracy is low. It also solves the problem that the SC has a long convergence time. The simulation results show that the hybrid search strategy has fast response speed and good robustness, and is an effective optimal control strategy.
2. Main topology of current source converter
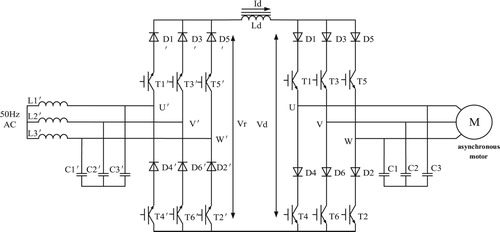
Current source converter is used in large and medium-sized drives system because of its inherent advantages such as perfect over-current ability, good dynamic response (Mark et al., Citation2014). The main topology of the current source converter is shown in Figure . It consists of input and output filter, rectifier, DC bus inductance and inverter.
Figure 1. Main topology of current source converter.
3. Asynchronous motor efficiency optimization control strategy
3.1. Optimization control strategy based on loss model
The loss of asynchronous motor mainly includes copper loss, iron loss, stray loss and mechanical loss. Reducing copper loss and iron loss are the main task of the efficiency optimization control system of asynchronous motor (Fei, Ming, & Hua, Citation2013; Garcia, Mendes Luis, Stephan, & Watanabe, Citation1994; Ju, Hao, Lei, & Kai, Citation2018; Roy, Prabhakar, & Kumar, Citation2017; Shreelakshmi & Agarwal, Citation2018).
An equivalent circuit of asynchronous motor in dq coordinate system is shown in Figure in which the stator leakage inductance and rotor leakage inductance are omitted.
Figure 2. Equivalent circuit of simplified asynchronous motor in dq coordinate system. (a) d axis equivalent circuit (b) q axis equivalent circuit.
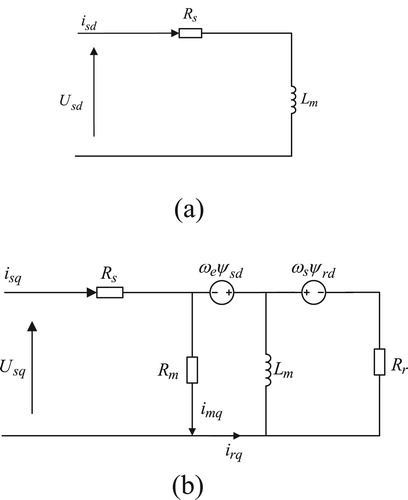
In the synchronous rotating coordinate system, when the d-axis orientated along the direction of the rotor flux , it can be obtained:
(1)
(1)
(2)
(2)
Rotor slip frequency
(3)
(3) Therefore, the controllable loss of asynchronous motor can be expressed as follows:
Stator iron loss
(4)
Stator copper loss
Rotor copper loss
From Equation (9), it can be seen that the total loss of the motor is just related to the rotor flux when the internal parameters of the motor remain unchanged and electromagnetic torque is fixed. The total loss of asynchronous motor
is a quadratic function of rotor flux
and there is a best optimal magnetic flux
which makes
minimum. The rotor flux derivation is calculated as
(10)
(10) Optimal rotor flux corresponding to minimum loss can be written as
(11)
(11) The optimal efficiency of asynchronous motor can be expressed as
(12)
(12)
3.2. Efficiency optimization control strategy based on golden section
Minimum power search control method is to change the input parameters of the motor and detect the input power of the control system to find the optimal parameters corresponding to the minimum input power (Feng, Huang, & Tan, Citation2010; Ning, Citation2014; Qi, Hua, & Ke, Citation2009; Xin, Hui, & Shui, Citation2004). Golden section efficiency optimization control strategy is one of the minimum power search control strategy which has better performance. With the efficiency optimization control based on the golden section method, the search space and termination limit of flux
should be determined firstly. In general, the rated flux value
is used as the upper limit of the search space, and 10% of the rated flux is chosen as the lower limit of the search space, that is, the search space is
. After the search interval and termination limit are determined, two flux values
and
are inserted according to the golden section algorithm, and the input power
and
corresponding to
and
are detected, respectively. Comparing the absolute value of the difference between the upper and lower bounds of the search space
with the termination limit
, if
is less than the termination limit
, the optimization is stopped and the optimal flux value is
. If the
is larger than the termination limit
, then the next step is to determine the size of
and
. According to the size of
and
, the corresponding algorithm is executed to obtain a new search space, and the iterative process is continued until the set termination condition is reached and the optimal flux value
is obtained.
3.3. Hybrid efficiency optimization control strategy
The efficiency optimization control strategy based on the golden section method can achieve the optimal efficiency without considering the internal parameters of the motor compared with the minimum loss model control strategy, but it will cause flux fluctuation in the process of searching and affect the robustness of the control system because of excessive search space. Assuming that the two flux and
inserted at the beginning of the algorithm jump from 61.2% of the rated flux to 38.2% in a short time, it may cause system shutdown. Therefore, a hybrid control algorithm is proposed which not only has the advantage of fast response of the minimum loss model but also has the advantage of the golden section method that can meet the global optimal efficiency without relying on the parameters of the motor itself. First, the approximate optimal flux value is calculated according to the minimum loss model, then a section near the optimal flux value is taken as the search space of the golden section method. This method overcomes the shortcoming of excessive search space in the golden section method, and solves the problem that the minimum loss model method relies too much on the parameters of the motor itself.
The search steps for efficiency optimization of hybrid methods are as follows:
When the running state of the asynchronous motor changes, the efficiency optimization control system enters the dynamic speed control state, and the rotor flux is set to the rated value to ensure that the system quickly enters the steady state.
When the system enters the steady state, that is,
In the hybrid efficiency optimization control process, if the system detects the speed deviation
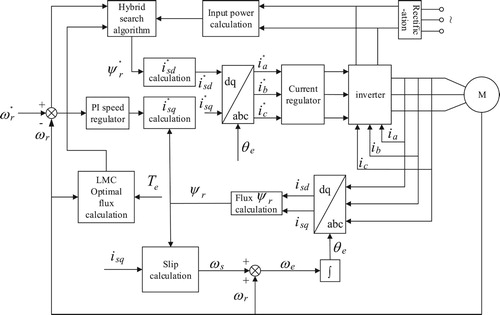
Figure 3. Block diagram of efficiency optimization system for vector control asynchronous motor drive based on the hybrid search method.
4. Simulation results
Based on MATLAB / SIMULINK simulation environment, the efficiency optimization control strategy of asynchronous motor based on loss model, golden section method and hybrid search method are simulated and verified respectively. The parameters of asynchronous motor in the experiment are shown in Table .
Table 1. Motor parameters.
4.1. Based on the loss model control
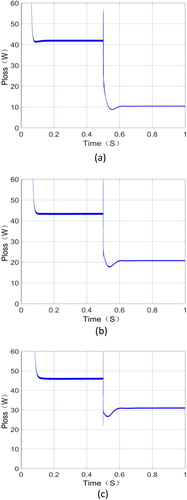
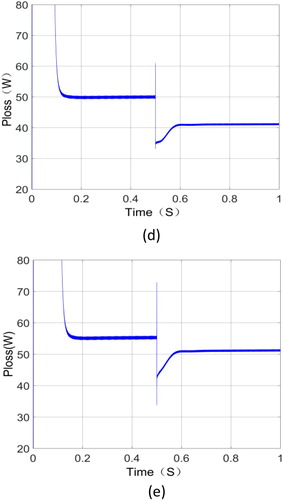
The flux value is set to the rated flux value. Given speed is 1000 r/min and a set of load torque are 0.1, 0.2, 0.3, 0.4, 0.5 N ⋅ m. The minimum loss control is added at 0.5 S. The loss power changes as shown in Figure .
Figure 4. Comparison of loss power for different load torque at speed 1000 r/min. (a) Loss power at TL = 0.1 N ⋅ m (b) Loss power at TL = 0.2 N ⋅ m (c) Loss power at TL = 0.3 N ⋅ m (d) Loss power at TL = 0.4 N ⋅ m (e) Loss power at TL = 0.5 N ⋅ m
The comparison of loss power and efficiency corresponding to the rated flux and the optimized flux at speed 1000 r/min is shown in Table .The efficiency curves of a given flux and optimized flux under different load are shown in Figure .
Figure 5. Efficiency curves of for different load torque at speed 1000 r/min.
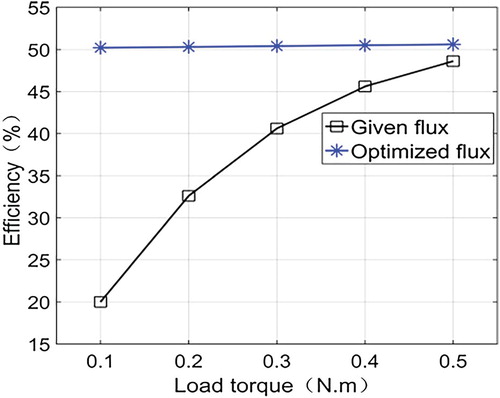
Table 2. Comparison of loss power and efficiency for different load torque at speed 1000 r/min.
It can be seen from Table , Figures and that the loss of the motor can be reduced based on the minimum loss control method and improving the efficiency of the asynchronous motor. When the rotor speed is fixed, the increase of efficiency decreases with the increase of load torque, that is, the efficiency optimization effect is most obvious under light load.
4.2. Based on the golden section method
Given the load torque is 0.3 N ⋅ m, the rotor speed is 1000 r/min, and the permissible error of the rotor flux is 0.05 Wb.
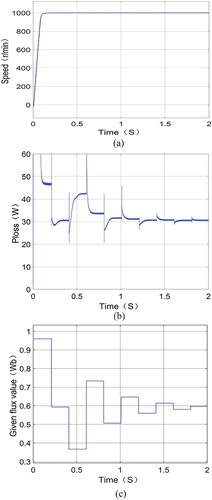
The golden section method is applied at 0.2 S. The simulation results are shown in Figure . It can be seen from Figure that the efficiency optimization algorithm based on the golden section method needs eight steps to get the optimal flux value and procedure duration is 1.8 S. The fluctuating range of the flux value is wider in the process of optimization that will affect the stability of the system.
Figure 6. Simulation results based on the golden section method. (a) Rotor speed (b) Loss power (c) Flux change process.
4.3. Based on the hybrid search control
The flux value is set to the rated flux value, assuming the permissible error of the rotor flux is 0.05 Wb and the hybrid search control is applied at 0.2 S when the speed reached steady state.
When the given load torque is 0.2 N ⋅ m and given speed is 500 r/min, simulation results are shown in Figure . When the given load torque is 0.3 N ⋅ m and given speed is 1000 r/min. The simulation results are shown in Figure .
Figure 7. Simulation results based on the hybrid method with TL is 0.2 N ⋅ m and speed is 500 r/min. (a) Rotor speed (b) Loss power (c) Flux change process.
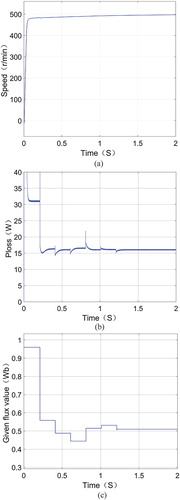
Figure 8. Simulation results based on the hybrid method with TL is 0.3 N ⋅ m and speed is 1000 r/min. (a) Rotor speed (b) Loss power (c) Flux change process.
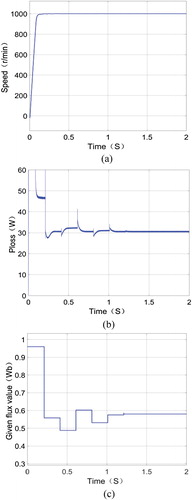
It can be seen from Figures and that the hybrid search algorithm only needs five steps to get the optimal flux value, and the flux value fluctuation range is smaller compared with the golden section method. Therefore, the system stability is higher and the optimization performance has been significantly improved.
Table shows comparison of above three efficiency optimization algorithms. When the given load torque is 0.3 N ⋅ m and the given speed is 1000 r/min, it can be seen that the optimal flux based on the loss model is suboptimal. Compared with the efficiency optimization based on the minimum loss model, both the optimal flux based on the golden section method and the optimal flux based on hybrid method are very closed to each other. The loss power of the control system based on the golden section method and the loss power of the control system based on hybrid methodare both reduced. But from Figures and , it can be seen that the convergence time of the hybrid search algorithm is less than the golden section method.
Table 3. Comparison of three efficiency optimization algorithms.
5. Conclusion
A hybrid efficiency optimization control strategy for asynchronous motor drive by current source is proposed. The hybrid search method overcomes the shortcoming of excessive search space and long convergence time of the online search algorithm, and solves the problem that the minimum loss model method relies too much on the parameters of the motor. It not only shortens the search time but also effectively reduces the system loss. The control system stability is higher and the optimization performance has been significantly improved. Therefore, the hybrid search method is an effective strategy for efficiency optimization control of asynchronous motor.
Disclosure statement
No potential conflict of interest was reported by the authors.
Reference
- Baby, B., & Shajilal, A. S. (2014). An improved indirect vector controlled current source inverter fed induction motor drive with rotor resistance adaptation. 2014 Annual International Conference on Emerging Research Areas: Magnetics, Machines and Drives (AICERA/iCMMD) (pp. 1–6). IEEE.
- Bin, D. Z., & Qi, L. J. (2016). Current situation and prospect of China's industrial motor system energy saving. Power Demand Side Management, 18(2), 1–4.
- Bose, B. K. (2013). Modern power electronics and AC drive. Beijing: Machinery Industry Press.
- Fei, X., Ming, S. L., & Hua, L. Y. (2013). On-line parameter observation and loss control strategy for asynchronous motor. Chinese Journal of Electrical Engineering, 33(6), 112–119.
- Feng, Z. L., Huang, Z. Y., & Tan, Z. (2010). Study on efficiency optimization control of asynchronous motor based on hybrid method. Micromotor, 38(7), 47–50.
- Fernando, J. T. E. F., & Anibal, T. D. A. (2008). Novel multi flux level, three-phase, squirrel-cage asynchronous motor for efficiency and power factor maximization. IEEE Transactions on Energy Conversion, 23(1), 101–109. doi: 10.1109/TEC.2007.914355
- Garcia, G. O., Mendes Luis, J. C., Stephan, R. M., & Watanabe, E. H. (1994). An efficient controller for an adjustable speed induction motor drive. IEEE Transactions on Industrial Electronics, 41(5), 533–539. doi: 10.1109/41.315272
- Ju, Y. W., Hao, C., Lei, C., & Kai, W. (2018). Analysis on iron loss of switched reluctance motor under PWM mode. COMPEL – The International Journal of Computations and Mathematics in Electrical and Electronic Engineering, 37(1), 448–464.
- Li, K., Zhang, C., Cui, N., & Kai, W. (2010). Comparative study of induction motor efficiency optimization control strategy for electric vehicle. 2010 8th World Congress on Intelligent Control and Automation (WCICA) (pp. 1882–1887). IEEE.
- Mark, A. P., Irudayaraj, G. C. R., Vairamani, R., et al. (2014). Dynamic performance analysis for different vector-controlled CSI-fed asynchronous motor drives. Journal of Power Electronics, 14(5), 1–11. doi: 10.6113/JPE.2014.14.5.989
- Mei, J., & Lin, H. C. (2010). Research of efficiency optimization control for asynchronous motor based on loss model. Electrical Measurement & Instrumentation, 47(540), 27–30.
- Ning, F. K. (2014). Research on efficiency optimization control of asynchronous motor based on vector control. China University of Mining and Technology.
- Peng, Z., & Xuan, F. W. (2017). Study on efficiency optimization control and dynamic response of asynchronous motor. Large Motor Technology, 1, 40–44.
- Qi, R. J., Hua, L. Y., & Ke, W. (2009). Efficiency optimization control of linear asynchronous motor by on-line search method. Journal of Electrical Technology, 24(5), 34–39.
- Roy, R., Prabhakar, K. K., & Kumar, P. (2017). Core-loss calculation in different parts of induction motor. IET Electric Power Applications, 11(9), 1664–1674. doi: 10.1049/iet-epa.2017.0369
- Shreelakshmi, M. P., & Agarwal, V. (2018). Trajectory Optimization for Loss Minimization in Induction Motor Fed Elevator Systems. IEEE Transactions on Power Electronics, 33(6), 5160–5170. doi: 10.1109/TPEL.2017.2735905
- Xin, C. N., Hui, Z. C., & Shui, D. C. (2004). Research progress on efficiency optimization control of variable frequency speed adjustable asynchronous motor. Journal of Electrical Technology, 19(5), 36–42.
- Xu, Z. G., & Shao, C. (2010). Loss model of asynchronous motor under efficiency maximization control. Journal of Dalian University of Technology, 50(5), 762–766.
- Zhang, L., Wen, X., & Zheng, Q. (2007). Fuzzy logic based hybrid search control strategy for efficiency optimization control of asynchronous motors. Zhongguo Dianji Gongcheng Xuebao/Proceedings of the Chinese Society of Electrical Engineering, 27(27), 83–87.