
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In this paper, the -consensus control problem is investigated for a class of nonlinear multi-agent systems with time-varying parameters under Weighted Try-Once Discard (WTOD) protocol. In order to reduce the data collision and improve the transmission efficiency between one agent and its neighbouring agents, the WTOD communication protocol is adopted to regulate the transmission orders of the neighbouring agents. The data transmission between each agent and its neighbouring agents is implemented via a constrained communication channel where only one neighbouring agent is allowed to transmit data at each time instant. The purpose of this paper is to design an effective control scheme such that, under the WTOD communication protocol, the prespecified
-consensus performance is achieved. Sufficient conditions are established for the existence of the desired controller in which the controller parameters are obtained by solving the linear matrix inequalities. Finally, a numerical simulation example is provided to illustrate the effectiveness of the theoretical results.
I. Introduction
Multi-agent systems (MASs) can be defined as a complex computing entity in which each agent has the capability of measuring and perceiving its surrounding environments and its neighbours independently. Moreover, the agents share their information through the network and therefore guiding their own actions by certain calculations so as to achieve the purpose of cooperation. During the past two decades, the MASs have received tremendous research attention which have been extensively applied to computer network, unmanned aerial vehicle formation, military and other domains due to their strong scalability, high reliability and easy maintenance (Li, Yang, & Wei, Citation2018; Ren, Moore, & Chen, Citation2006; Smith, Hanssmann, & Leonard, Citation2001; Wolfe, Chichka, & Speyer, Citation1996). In order to show the superiority of MASs, it is of great importance to explore the distributed coordination and cooperation of all the agents which has both theoretical and practical significance (Ding, Wang, Shen, & Wei, Citation2015; Ma, Wang, Han, & Liu, Citation2017; Olfati-Saber, Fax, & Murray, Citation2007).
In the research of MASs consensus control problem, the appearance of the interferences is inevitable because of the limitation of the operating environment. Accordingly, it is of necessity to take the external disturbance into consideration in the model establishment and control performance analysis. Up to now, the -consensus control problems for the MASs with external disturbance have been discussed widely, see Lin and Jia (Citation2010), Wang, Ding, Dong, and Shu (Citation2013), Xu, Wang, and Ho (Citation2018) and the reference therein. Nevertheless, it is worth pointing out that most of the the existing results are concerned with the linear model. However, as a universal phenomenon, the nonlinearities always arise in practical engineering applications which would have great influence on the dynamic behaviour of the agents (Dunbar, Citation2007; Franco, Magni, Parisini, & Polycarpou, Citation2008; He, Chen, Han, & Qian, Citation2017; Hu, Wang, & Gao, Citation2018). For the sake of dealing with the nonlinearities, different kinds of methods have been proposed. For instance, the nonlinearities have been constrained by sector-bounded conditions (Hu, Guo, Hu, & Yang, Citation2015; Hu, Wang, Alsaadi, & Hayat, Citation2017) and Lipschitz conditions (Jenabzadeh & Safarinejadian, Citation2018; Li, Liu, Fu, & Xie, Citation2012; Zuo, Zhang, & Wang, Citation2014), respectively.
In a MAS, every individual needs to communicate with each other to exchange information in order to obtain global information. At present, the research on the consensus control is based on the assumption that the communication medium is ideal, i.e. each agent can obtain the accurate information of all its neighbouring agents timely and accurately. Note that in reality, due to the constraints of the communication resources such as the limited bandwidth of the network, an agent can not communicate with all the neighbouring agents simultaneously. To solve this problem, the communication protocol has been exploited to determine which neighbouring agent has the privilege to send information to the certain agent. There are many types of communication protocols commonly used in industry such as Round-Robin (RR) protocol (Bu, Dong, Han, Hou, & Li, Citation2019; Wan, Wang, Wu, & Liu, Citation2019), stochastic communication (SC) protocol (Wan, Wang, Han, & Wu, Citation2018) and weighted try-once-discard (WTOD) protocol (Shen, Wang, Shen, Alsaadi, & Alsaadi, Citation2020; Wang, Wang, Shen, & Li, Citation2019). It should be emphasized that the RR and SC protocols are independent on the measurement information, however, the WTOD protocol orchestrates the transmission orders in accordance with a designed quadratic selection rule which is dependent on the current measurement outputs. So far, the protocol-based consensus control problem has received some initial research attention (Song, Han, Fu, & Liu, Citation2019; Wan, Wang, Wu, & Liu, Citation2018; Wan et al., Citation2019; Xu, Lu, Shi, Li, & Xie, Citation2018; Zou, Wang, & Gao, Citation2016; Zou, Wang, Gao, & Alsaadi, Citation2017; Zou, Wang, & Gao, Citation2017), for example, the RR protocol and SC protocol have been respectively considered in Song et al. (Citation2019) and Zou et al. (Citation2017) in the control scheme design for MASs.
Based on the above discussions, in this paper, we aim to investigate the -consensus control problem for a class of nonlinear MASs with time-varying parameters under the WTOD communication protocol. The novelties of this paper are summarized as follows: (1) the model of the MASs under consideration is comprehensive which includes nonlinearities and time-varying parameters; (2) the WTOD protocol is employed during the communication among agents to reduce data transmission congestions and save precious energy; and (3) a consensus controller is designed for each agent to ensure the desirable
-consensus control performance and the gain parameters are derived by solving a set of recursive linear matrix inequalities (RLMIs).
The remaining of this paper is organized as follows. Section II formulates the -consensus controller design issue for nonlinear MASs under WTOD communication protocol. Section III presents the main results, where the sufficient conditions ensuring the predefined
performance constraint are obtained for the MASs. Moreover, the gains of the controllers are computed in terms of the solutions to the RLMIs. In addition, Section IV gives a simulation example to illustrate the effectiveness of the designed control scheme. Finally, Section V outlines the conclusions of this paper.
Notation: The notations used in this paper is fairly standard except where otherwise stated. represents the transpose of A.
represents the n dimensional Euclidean space and
is the set of all
real matrices. The notation P>0 means that P is a real, positive definite matrix. The shorthand
stands for a block-diagonal matrix. * always represents the symmetric block in a symmetric matrix.
is a binary function which equals to 1 for y = 0 and equals to 0 for
. The operator ⊗ stands for the Kronecker product. ° denotes the Hadamard product operation.
is an
matrix with all elements being 1. The N-dimensional identity matrix is denoted as
or simply I, if no confusion is caused.
II. Problem formulation
Graph theory is widely used to model the communication topology of the network communication relationship of the agents in a MAS. Therefore, some necessary and required concepts regarding graph theory are introduced. In this paper, the communication network of a MAS compose of n agents is modelled by an undirected graph . Let
be a graph of order n where
,
, and
represent the set of agents, the set of edges and a weighted adjacency matrix with non-negative adjacency elements
, respectively. An edge
in an undirected graph
denotes that agent i and j can receive information from each other. The adjacency elements associated with the edges of a weighted graph are positive
if
, otherwise
and it is assumed that self-edges
are not permitted, i.e.
. The set of neighbouring agents of agent i is represented by
with
being the number of neighbours of agent i.
Consider a discrete-time nonlinear MAS with n identical agents, the dynamics of the ith agent is depicted by the following discrete-time system over the finite time horizon :
(1)
(1) where
is the agent state,
is the control input,
is the measurement output and
is the controlled output.
is the external disturbances. The time-varying matrices
,
,
,
,
,
and
are system parameters with proper dimensions, and
is a full-column rank matrix. The nonlinear vector-valued function
contains all possible nonlinearities which is assumed to be continuous and satisfies the following sector bounded condition:
(2)
(2) where
and
are two real matrices with
. Then, we know that
(3)
(3) where
,
.
In order to alleviate the communication resource occupations, the WTOD communication protocol is introduced between agent i and its neighbouring agents. The WTOD protocol can decide which neighbouring agent has the authority to communicate with agent i at a particular time point. Denoting
and
as the original measurement outputs and the received measurement output of agent i from the neighbouring agent j, repectively, the updating rule of
under the WTOD protocol is expressed as follows:
(4)
(4) where
(5)
(5) in which
with
. R is a given positive-definite weighting matrix.
Under the scheduling of the WTOD protocol, the controller for each agent is constructed as follows:
(6)
(6) where
is the consensus control gain matrix to be computed later and
.
Remark II.1
In this paper, we consider the WTOD protocol to save communication energy and prevent data collisions. Under the WTOD protocol, agent i can only receive the measurement output from one neighbouring agent at time instant k. How to select the neighbouring agent j is dependent on the absolute error between the measurement output of agent i and the last updated measurement output of all the neighbouring agents, i.e. the agent with larger absolute error has the chance to transmit data. That is to say, among all the neighbouring agents of agent i, only the jth () has the access right at each time instant which is denoted by
. At the same time, the measurement outputs of the neighbouring agents except agent j keep the values of the last time instant, i.e.
(
,
).
Before proceeding further, the following lemmas are introduced for facilitating the subsequent derivations.
Lemma II.1
Horn & Johnson, Citation1994
For any matrices X, Y, A and B with appropriate dimensions, the properties of Kronecker product ⊗ are described as follows:
.
Lemma II.2
Styan, Citation1973
For any matrices and
the row-sums of
are diagonal entries of
where
represents the element in the ath row and bth column of the matrix U.
Defining
it is deduced from (Equation6
(6)
(6) ) that
(7)
(7) where
Obviously, the matrix
is determined by the sequence
which represents the selected neighbouring agent.
For simplification, the following symbols are introduced:
Combining (Equation1
(1)
(1) ) with (Equation7
(7)
(7) ), the closed-loop system is described as
(8)
(8) Letting
with
,
, we obtain that
and
where
. In addition, it is deduced from Lemma II.2 that
(9)
(9) According to the characteristics of the matrix
, we have
. Then, the closed-loop dynamics of
is represented in the following form:
(10)
(10) Letting
, we acquire the following augmented system that represents the dynamics of the considered MAS:
(11)
(11) where
It follows from (Equation3
(3)
(3) ) that
(12)
(12) where
Before proceeding further, we present the desirable performance index.
Definition II.1
For the given disturbance attenuation level , a positive definite matrix
and the initial state
. The MAS (Equation11
(11)
(11) ) with a prescribed connected topology is said to satisfy the
-consensus control performance constraint over a finite time horizon
if the following inequality holds:
(13)
(13) The objective of this paper is to design
-consensus controllers for the time-varying nonlinear MASs (Equation1
(1)
(1) ) under the WTOD communication protocol. In other words, we are concentrating on developing a controller described by (Equation6
(6)
(6) ) for each agent such that the above
-consensus control performance is achieved over a finite time horizon
.
III. Main results
In this section, by resorting to the Lyapunov stability theorem, the sufficient conditions are derived to ensure that the augmented systems (Equation11(11)
(11) ) achieves the desired
performance constraint (Equation13
(13)
(13) ) under the given initial condition for
. Moreover, the controller parameters are obtained in terms of the solutions to the certain RLMIs.
To proceed, the following three lemmas are useful for the subsequent developments.
Lemma III.1
(S-procedure)(Boyd, Ghaoui, Feron, & Balakrishnan, Citation1994)
Let be quadratic functions of
with
. Then,
is true if there exist scalars
such that
(14)
(14) holds.
Lemma III.2
Han, Wei, Ding, & Song, Citation2017
For a full-column rank matrix
there always exist two orthogonal matrices
and
satisfying
(15)
(15) where
and
are non-zero singular values of matrix
. Therefore, if the structure of matrix
has the following form:
(16)
(16) where
then there exists a nonsingular matrix
such that
. Moreover,
.
Theorem III.1
Let the disturbance attenuation level and the controller gain matrices
in (Equation6
(6)
(6) ) be known. For the given positive definite matrix S and the initial condition
the nonlinear MAS (Equation1
(1)
(1) ) under WTOD communication protocol (Equation5
(5)
(5) ) satisfy the
-consensus control performance (Equation13
(13)
(13) ) for all
if there exist a sequence of symmetric positive definite matrices
and a family of positive scalars
satisfying the following recursive matrix inequality:
(17)
(17) where
Proof.
Defining the following function for system (Equation11(11)
(11) )
(18)
(18) then one has
(19)
(19) where
Considering the nonlinear constraint (Equation12
(12)
(12) ) and Lemma III.1, we obtain
(20)
(20) where
Adding the zero term
to (Equation20
(20)
(20) ) yields
(21)
(21) It follows from (Equation17
(17)
(17) ) that
. As a result, one has
(22)
(22) Then, summing up both sides of (Equation22
(22)
(22) ) with respect to k from 0 to
, we derive
(23)
(23) Taking the
and
into account, one finally has
which is clear to see that J<0 if
and the
performance (Equation13
(13)
(13) ) is therefore achieved.
The proof is now complete.
Remark III.1
In Theorem III.1, the -consensus control problem for the addressed nonlinear discrete-time MASs with time-varying parameters has been analyzed. A sufficient condition has been developed to ensure the
performance constraint with
under the WTOD protocol. In what follows, the controller parameters will be derived by resorting to some matrix inequalities.
Theorem III.2
Consider the nonlinear discrete-time MASs (Equation1(1)
(1) ) with time-varying parameters under the WTOD communication protocol (Equation5
(5)
(5) ). For the given disturbance attenuation level
as well as the positive definite matrices
and
with
the closed-loop system (Equation11
(11)
(11) ) satisfies the
performance constraint (Equation13
(13)
(13) ) if there exist a sequence of scalars
a set of matrices
and a series of positive definite matrices
satisfying the initial condition
and the following RLMI:
(24)
(24) where
Furthermore, if the above inequality is feasible, the controller gain matrix
is computed by
(25)
(25) The matrices
have been defined in Lemma III.2.
Proof.
By using Schur Complement Lemma, the inequality (Equation17(17)
(17) ) is transformed into the following inequality:
(26)
(26) where
Next, in order to convert the inequality (Equation26
(26)
(26) ) into a linear matrix inequality, perform the congruent transformation to (Equation26
(26)
(26) ) by
. Then, from Lemma III.2, one has
,
and
. Denoting
, we obtain (Equation24
(24)
(24) ) and (Equation25
(25)
(25) ), which ends the proof.
According to Theorem III.2, the -consensus controller design (CCD) algorithm is summarized as follows:
Table
Remark III.2
Up to now, we have investigated the -consensus control problem for a class of nonlinear MASs with time-varying parameters under WTOD communication protocol over the finite-horizon. A new consensus controller has been designed via utilizing the scheduled measurement outputs of the neighbouring agents. The sufficient conditions have been established such that the augmented system is stable with satisfactory
performance constraint. Compared with the existing literature, the peculiarities of the main results obtained in this paper are shown as follows: (1) the consensus control scheme designed in this paper is applicable to handle the control problem of the nonlinear MASs with time-varying parameters under the WTOD communication protocol; (2) for saving communication resources, the protocol-based controller is put forward, where each agent can only receive one neighbouring agent's information at each time instant; and (3) the sufficient conditions has been acquired for the underlying system to achieve the desired
-consensus control performance constraint over a finite-time horizon.
IV. An illustrative example
In this part, a numerical example is presented to illustrate the validity of the proposed -consensus controller design algorithm for nonlinear MASs with time-varying parameters under WTOD communication protocol simultaneously.
For a given finite-time horizon , we consider a MAS with 3 agents whose communication topology is described by an undirected graph
with the set of agents
and the corresponding adjacency matrix
is given as follows:
The system parameters of (Equation1
(1)
(1) ) are set as follows:
It is assumed that the nonlinear function
, and
,
. Moreover, we set the positive definite matrices as
,
, the weighting matrix
. The initial values of the states are selected as
,
,
where
. The external disturbance is chosen as
and the
consensus control performance index is set as
.
In the simulation results, Figures – plot the actual states of the underlying agents. Figures – plot the state consensus errors of the underlying agents, where ,
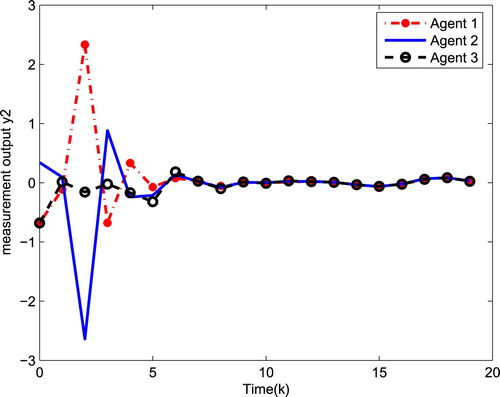
Figures – presents the measurement outputs of the underlying agents, where
,
From the simulation results, it is obvious to see that the MAS (Equation1
(1)
(1) ) has good control performance under the proposed control scheme in this paper.
Figure 1. The first state of three agents ,
and
.
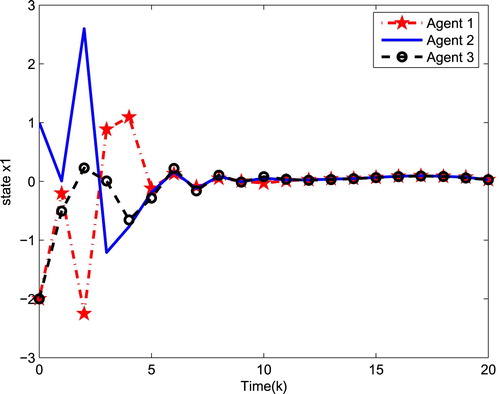
Figure 2. The second state of three agents ,
and
.
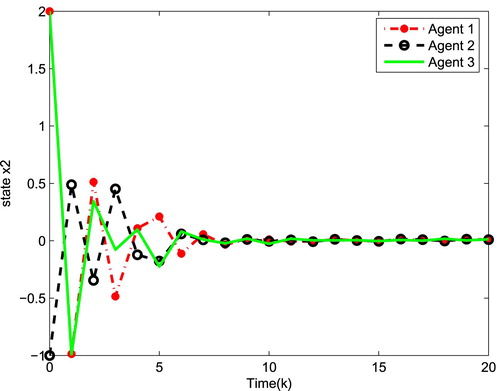
Figure 3. The first state consensus error of three agents ,
and
.
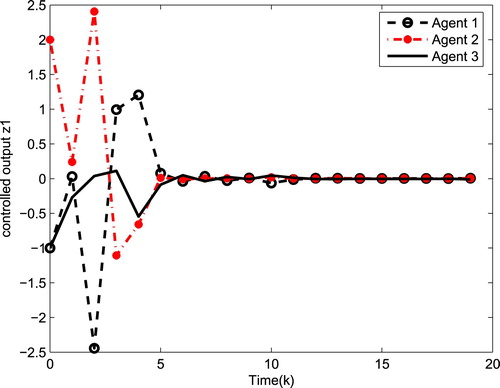
Figure 4. The second state consensus error of three agents ,
and
.
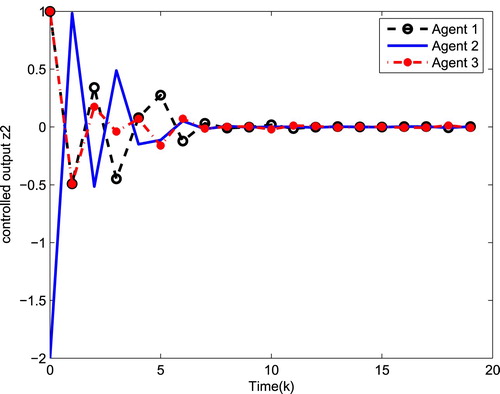
Figure 5. The first measurement output of three agents ,
and
.
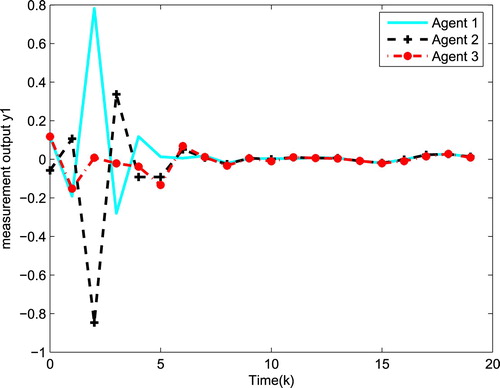
Figure 6. The second measurement output of three agents ,
and
.
V. Conclusion
This paper has investigated the -consensus control problem for a class of time-varying nonlinear MASs under WTOD communication protocol over a finite-time horizon. The nonlinearities considered in this paper satisfy the sector-bounded conditions. The WTOD communication protocol has been adopted to schedule the information transmission orders of the neighbouring agents at each time instant for the purpose of mitigating the data collisions. Sufficient conditions have been derived for the designed consensus controller to meet the prescribed
performance constraints. The explicit expression of the controller gain matrix has been characterized in terms of the solution to a certain set of RLMI. Finally, the effectiveness of the proposed controller design scheme has been demonstrated by an illustrative example.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Boyd, S., Ghaoui, L. E., Feron, E., & Balakrishnan, V. (1994). Linear matrix inequalities in system and control theory. Philadelphia, PA: SIAM.
- Bu, X., Dong, H., Han, F., Hou, N., & Li, G. (2019). Distributed filtering for time-varying systems over sensor networks with randomly switching topologies under the Round-Robin protocol. Neurocomputing, 346, 58–64. doi: 10.1016/j.neucom.2018.07.087
- Ding, D., Wang, Z., Shen, B., & Wei, G. (2015). Event-triggered consensus control for discrete-time stochastic multi-agent systems: the input-to-state stability in probability. Automatica, 62, 284–291. doi: 10.1016/j.automatica.2015.09.037
- Dunbar, W. B. (2007). Distributed receding horizon control of dynamically coupled nonlinear systems. IEEE Transactions on Automatic Control, 52(7), 1249–1263. doi: 10.1109/TAC.2007.900828
- Franco, E., Magni, L., Parisini, T., Polycarpou, M. M., & Raimondo, D. M. (2008). Cooperative constrained control of distributed agents with nonlinear dynamics and delayed information exchange: A stabilizing receding-horizon approach. IEEE Transactions on Automatic Control, 53(1), 324–338. doi: 10.1109/TAC.2007.914956
- Han, F., Wei, G., Ding, D., & Song, Y. (2017). Finite-horizon H∞-consensus control for multi-agent systems with random parameters: the local condiction case. Journal of the Franklin Institute, 354, 6078–6097. doi: 10.1016/j.jfranklin.2017.07.010
- He, W., Chen, G., Han, Q., & Qian, F. (2017). Network-based leader-following consensus of nonlinear multi-agent systems via distributed impulsive control. Information Sciences, 380, 145–158. doi: 10.1016/j.ins.2015.06.005
- Horn, R. A., & Johnson, C. R. (1994). Topics in matrix analysis. Cambridge, UK: Cambridge University Press.
- Hu, M., Guo, L., Hu, A., & Yang, Y. (2015). Leader-following consensus of linear multi-agent systems with randomly occurring nonlinearities and uncertainties and stochastic disturbances. Neurocomputing, 149, 884–890. doi: 10.1016/j.neucom.2014.07.047
- Hu, J., Wang, Z., Alsaadi, F. E., & Hayat, T. (2017). Event-based filtering for time-varying nonlinear systems subject to multiple missing measurements with uncertain missing probabilities. Information Fusion, 38, 74–83. doi: 10.1016/j.inffus.2017.03.003
- Hu, J., Wang, Z., & Gao, H. (2018). Joint state and fault estimation for uncertain time-varying nonlinear systems with randomly occurring faults and sensor saturations. Automatica, 97, 150–160. doi: 10.1016/j.automatica.2018.07.027
- Jenabzadeh, A., & Safarinejadian, B. (2018). Distributed tracking control problem of Lipschitz multi-agent systems with external disturbances and input delay. Systems Science & Control Engineering, 6(1), 268–278. doi: 10.1080/21642583.2018.1485060
- Li, Z., Liu, X., Fu, M., & Xie, L. (2012). Global H∞ consensus of multi-agent systems with Lipschitz non-linear dynamics. IET Control Theory & Applications, 6(13), 2041–2048. doi: 10.1049/iet-cta.2011.0555
- Li, W., Yang, F., & Wei, G. (2018). A novel observability gramian-based fast covariance intersection rule. IEEE Signal Processing Letters, 25(10), 1570–1574. doi: 10.1109/LSP.2018.2867741
- Lin, P., & Jia, Y. (2010). Robust H∞ consensus analysis of a class of second-order multi-agent systems with uncertainty. IET Control Theory & Applications, 4(3), 487–498. doi: 10.1049/iet-cta.2008.0492
- Ma, L., Wang, Z., Han, Q.-L., & Liu, Y. (2017). Consensus control of stochastic multi-agent systems: a survey. Science China Information Sciences, 60(12), 120–201.
- Olfati-Saber, R., Fax, J. A., & Murray, R. M. (2007). Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE, 95(1), 215–233. doi: 10.1109/JPROC.2006.887293
- Ren, W., Moore, K., & Chen, Y. (2006). High-order consensus algorithms in cooperative vehicle systems. Proceedings of the IEEE international conference on networking, sensing and control (pp. 457–462). Fort Lauderdale.
- Shen, Y., Wang, Z., Shen, B., Alsaadi, F. E., & Alsaadi, F. E. (2020). Fusion estimation for multi-rate linear repetitive processes under weighted try-once-discard protocol. Information Fusion, 55, 281–291. doi: 10.1016/j.inffus.2019.08.013
- Smith, T. R., Hanssmann, H., & Leonard, N. E. (2001). Orientation control of multiple underwater vehicles with symmetry-breaking potentials. Proceedings of the 40th IEEE conference on decision and control (pp. 4598–4603). Orlando, FL.
- Song, J., Han, F., Fu, H., & Liu, H. (2019). Finite-horizon distributed H∞ -consensus control of time-varying multi-agent systems with Round-Robin protocol. Neurocomputing, 364, 219–226. doi: 10.1016/j.neucom.2019.07.013
- Styan, G. P. H. (1973). Hadamard products and multivariate statistical analysis. Linear Algebra & Its Applications, 6, 217–240. doi: 10.1016/0024-3795(73)90023-2
- Wan, X., Wang, Z., Han, Q., & Wu, M. (2018). Finite-time H∞ state estimation for discrete time-delayed genetic regulatory networks under stochastic communication protocols. IEEE Transactions on Circuits and Systems I-Regular Papers, 65(10), 3481–3491. doi: 10.1109/TCSI.2018.2815269
- Wan, X., Wang, Z., Wu, M., & Liu, X. (2018). State estimation for discrete time-delayed genetic regulatory networks with stochastic noises under the round-robin protocols. IEEE Transactions on Nanobioscience, 17(2), 145–154. doi: 10.1109/TNB.2018.2797124
- Wan, X., Wang, Z., Wu, M., & Liu, X. (2019). H∞ state estimation for discrete-time nonlinear singularly perturbed complex networks under the Round-Robin protocol. IEEE Transactions on Neural Networks and Learning Systems, 30(2), 415–426. doi: 10.1109/TNNLS.2018.2839020
- Wang, Z., Ding, D., Dong, H., & Shu, H. (2013). H∞ consensus control for multi-agent systems with missing measurements: The finite-horizon case. Systems & Control Letters, 62(10), 827–836. doi: 10.1016/j.sysconle.2013.06.004
- Wang, D., Wang, Z., Shen, B., & Li, Q. (2019). H∞ finite-horizon filtering for complex networks with state saturations: The weighted try-once-discard protocol. International Journal of Robust and Nonlinear Control, 29(7), 2096–2111. doi: 10.1002/rnc.4479
- Wolfe, J. D., Chichka, D. F., & Speyer, J. L. (1996). Decentralized controllers for unmanned aerial vehicle formation flight. Proceedings of the AIAA, guidance, navigation and control conference (pp. 3796–3833). San Diego, CA.
- Xu, Y., Lu, R., Shi, P., Li, H., & Xie, S. (2018). Finite-time distributed state estimation over sensor networks with round-robin protocol and fading channels. IEEE Transactions on Cybernetics, 48(1), 336–345. doi: 10.1109/TCYB.2016.2635122
- Xu, W., Wang, Z., & Ho, D. W. (2018). Finite-horizon H∞ consensus for multiagent systems with redundant channels via an observer-type event-triggered scheme. IEEE Transactions on Cybernetics, 48(5), 1567–1576. doi: 10.1109/TCYB.2017.2707590
- Zou, L., Wang, Z., Gao, H., & Alsaadi, F. E. (2017). Finite-horizon H∞ consensus control of time-varying multiagent systems with stochastiv communicaiton protocol. IEEE Transactions on Cybernetics, 47(8), 1830–1840. doi: 10.1109/TCYB.2017.2685425
- Zou, L., Wang, Z., & Gao, H. (2016). Set-membership filtering for time-varying systems with mixed time-delays under Round-Robin and weighted try-once-discard protocols. Automatica, 74, 341–348. doi: 10.1016/j.automatica.2016.07.025
- Zou, L., Wang, Z., Gao, H., & Liu, X. (2017). State estimation for discrete-time dynamical networks with time-varying delays and stochastic disturbances under the round-robin protocol. IEEE Transactions on Neural Networks & Learning Systems, 28(5), 1139–1151. doi: 10.1109/TNNLS.2016.2524621
- Zuo, Z., Zhang, J., & Wang, Y. (2014). Adaptive Fault tolerant tracking control for linear and Lipschitz nonlinear multi-agent systems. IEEE Transactions on Electronics, 62(6), 3923–3931.