
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
Despite all the technological progress in the arena of automated and robotized systems, humans will continue to play a significant role in the warehouse of the future, due to their distinctive skills and economic advantages for certain tasks. Although industry and engineering have mainly dealt with the design and functionalities of automated warehouses, the role of human factors and behavior is still underrepresented. However, many novel warehousing systems require human–machine interactions, leading to a growing scientific and managerial necessity to consider human factors and behavior, particularly for operational activities. This is the first study that comprehensively identifies and analyzes relevant behavioral issues of interactions between warehouse operators and machines. To do so, we develop a systematic framework that links human–machine interactions with behavioral issues and implications on system performance across all operational warehouse activities. Insights generated by interviews with warehousing experts are applied to identify the most important issues. We develop a comprehensive research agenda, consisting of a set of potential research questions associated to the identified behavioral issues. The discussion is enriched by providing theoretical and managerial insights from related domains and existing warehousing research. Ultimately, we consolidate our findings by developing overarching theoretical foundations and deriving unifying themes.
1. Introduction
Over decades, warehouse operations have traditionally relied on manual processes, due to human operators being more efficient in many aspects such as handling and picking a large variety of products. Enabled by advances in Internet of Things devices and artificial intelligence coupled with the advent of new system providers and more cost-efficient solutions, warehousing has been revolutionized during the last decade: Human operators have found themselves next to new robotized and automated teammates (Olsen and Tomlin, Citation2020). The size of the warehouse automation industry has been growing by 12% annually between 2014 and 2019, and is predicted to double its size from USD 15 billion to USD 30 billion in the next 6 years (IFR, Citation2020; Statista, Citation2020; The Logistics iQ, Citation2020). The resulting development and utilization of novel automated and robotized systems are boosting the transformation of warehousing from a cost center to a central component in the value proposition of firms. Automated warehousing systems help in this process by enabling faster throughput times, higher service levels, labor cost reductions, efficient space utilization, and improved ergonomics for human workers (see, e.g., Zaerpour et al. (Citation2017); Azadeh et al. (Citation2019); Lamballais et al. (Citation2020)). For instance, Amazon is currently employing more than 200,000 warehouse robots to accelerate its growth in online retail and logistics, driven by faster picking times and lower operating costs (IHCI, Citation2020). There are many other examples including Hermes, a leading logistics provider, who optimized its return handling processes by installing a new automated inspection and handling system, increasing the capacity by 50% (Logistics Manager, Citation2020). Innovations in warehouse automation thus play a crucial part in delivering products efficiently and effectively throughout supply chains.
Despite the growing and ubiquitous presence of automated and robotized systems in warehouses, human operators will still be necessary to fulfill operational activities. Tye Brady, the chief technologist of Amazon Robotics, described this with the following words:
The efficiencies we gain from our associates and robotics working together harmoniously – what I like to call a symphony of humans and machines working together – allows us to pass along a lower cost to our customer (IEEE, Citation2020).
This statement is just one of many anecdotes evidencing that manual workforces and machines will be working alongside each other in the warehouse of the future (Olsen and Tomlin, Citation2020). Humans have distinctive characteristics, skills and capabilities that robots are not able to replicate or perform cost efficiently. For instance, they excel in flexibility when swift reactions are needed to match the volatility of the picking workload (e.g., during high-peak sales seasons). As automated picking solutions are generally linked to a specific capacity, human operators compensate for these fluctuations and continue to play a decisive role in aligning supply and demand. They are also able to handle a larger product variety along different criteria such as product dimensions, weight, special handling requirements (for fragile products, for instance) or packaging types (Gutelius and Theodore, Citation2019). Automated and robotized systems are typically fixed for certain product specifications, while humans continue to complement or even outperform those in dynamic circumstances with changing specifications (Sgarbossa et al., Citation2020).
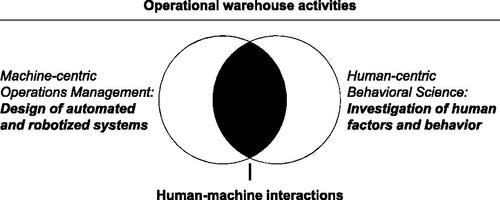
As workers collaborate with automated and robotized systems on many tasks across the main operational activities (i.e., receiving, storing, picking and packing - see and for examples), new models, frameworks and concepts are needed to efficiently manage human–machine interactions (De Koster et al., Citation2020; Olsen and Tomlin, Citation2020). Such interactions at the operational execution level are part of a socio-technical system with many variables (Monostori et al., Citation2016; Yang et al., Citation2019), including human factors and behavior. These systems are usually developed considering the views of engineers or programmers, whereas the perspectives of the actual blue-collar workers in the loop and corresponding behavioral aspects are often neglected (Moniz and Krings, Citation2016). However, actions and decisions of the operators may deviate from engineers’ expectations and thus impact operations management metrics in both positive and negative directions (Boudreau et al., Citation2003; Bendoly et al., Citation2006; Croson et al., Citation2013; Udenio et al., Citation2017; Papadopoulos et al., Citation2019). To establish efficient automated and robotized warehousing systems, it is imperative to understand and account for human factors of workers in operational activities (Donohue et al., Citation2020), and to consider behavioral methodologies, as they provide the opportunity to solve emerging issues in human–machine interactions (Kumar et al., Citation2018). Combining machine-centric Operations Management (OM), i.e., the design, plan, control and management of systems and processes, with human-centric Behavioral Science (BS), i.e., the exploration and integration of human actions, factors and behavior, becomes indispensable to improve decisions and capabilities in automated and robotized warehouses. visualizes the blending of two required perspectives to efficiently manage operational warehouse activities using human–machine interactions.
Figure 1. Simultaneous picking with robots (Source: Magazino).

Figure 2. Picking at workstations (Source: Knapp).

Figure 3. Necessary blending of research streams to establish efficient interactions.
However, the current literature on such interactions and their behavioral implications on OM in warehousing is rather scarce. Four recent review articles exist from the first literature stream on operational management for automated and robotized warehousing systems (the left of ): Azadeh et al. (Citation2019) structure novel systems for storage and picking activities along design and control of technologies, modeling techniques, and research opportunities. Boysen et al. (Citation2019) and Boysen et al. (Citation2021) discuss warehousing systems for their suitability to e-commerce and bricks-and-mortar retailing, respectively. Fragapane et al. (Citation2021) review pertinent work on autonomous mobile intralogistic robots and provide guidance and methods for their planning and control. Additional studies in this stream focus on the development of mathematical operation models and decision support for specific applications in automated storage and order picking systems (see Tappia et al. (Citation2019), Yuan et al. (Citation2019), Lamballais et al. (Citation2020), or Xie et al. (Citation2021) for examples). Azadeh et al. (Citation2019) conclude that further research should be conducted on novel warehousing systems to cope with rapid developments of technologies and increased implementation in practice. Most importantly, none of the above-mentioned studies incorporate human factors and behavior into their analysis, nor do these articles focus on the specifics of interactions between operators and depicted systems. Regarding the second stream and the behavioral perspective in warehouses (the right of ), human factors and behavioral issues for operational activities are discussed by Grosse et al. (Citation2015) and Grosse et al. (Citation2017) in a content analysis and literature review on human factors in manual order picking. Besides that, only few selected use cases involving behavioral aspects in manual order picking exist (see De Vries et al. (Citation2016a, Citation2016b), Matusiak et al. (Citation2017), Batt and Gallino (Citation2019), or Glock et al. (Citation2019) for examples). This means that even for conventional warehouses, human factors have not even been adequately addressed up to now. In this sense, it also remains unclear which human–machine interactions and behavioral mechanisms are crucial in automated warehouses, although their analysis and optimization is important to ensure efficient operations.
The controllable and structured environment in warehouses makes many of them incubators for the development and application of automated and robotized systems in supply chains (Azadeh et al., Citation2019; Fragapane et al., Citation2021). Specific requirements for operational activities and the necessary collaboration of operators with a growing diverse range of machines expose warehousing as a unique research area at the intersection of OM and BS. Despite several calls for research on behavioral implications of operational human–machine interactions in warehousing (see e.g., Azadeh et al. (Citation2019), Boysen et al. (Citation2019), or Jaghbeer et al. (Citation2020)), the amount of existing studies is very limited. Exploring a new research area at an intersection of research domains requires developing a common understanding across literature streams. This needs to be accomplished with a comprehensive identification and ordering of the nascent topics before they can be analyzed in depth and in a structured manner. Naturally, such new areas are insufficiently explored and require the formulation of research questions. Hence, this is the first article that comprehensively compiles a research agenda for human–machine interactions in the warehouse including theoretical foundations and unifying themes. To ensure a structured approach that connects all relevant dimensions and variables in this domain, we develop a systematic framework. This forms the foundation to identify and analyze the most relevant behavioral issues for these interactions (for the sake of brevity we use the term “issue” in the following), including open research questions. This is amended with theoretical and managerial insights from related domains and existing warehousing research, serving as starting points to improve operational decision-making for human interactions with automated and robotized systems. Ultimately, we consolidate the findings by providing theoretical foundations and unifying themes, guiding the way for future research in human–machine interactions in the warehouse.
The current article aims at helping OM, and in particular warehousing, researchers to identify potential effects of human behavior. Furthermore, we want to encourage scholars from the field of BS and human factors to consider warehousing as an interesting area of application. When discussing issues in detail, we first identify the issue and associated research questions, before elaborating on the mechanism and consequences on system performance. The latter provides in-depth insights for researchers planning to analyze those or related issues. The overarching theoretical foundations and unifying themes provide causal and salient relationships in warehousing interactions as starting points for further studies.
The remainder of this article begins with Section 2, detailing the methodological approach. We build a systematic framework in Section 3 to analyze human–machine interactions and behavioral issues in Section 4. The findings are summarized by developing theoretical foundations and unifying themes in Section 5. Section 6 concludes with managerial and theoretical implications, and provides limitations as well as a brief outlook on our study.
2. Research methodology
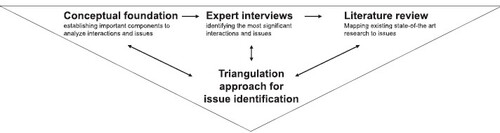
Research on human–machine interactions in warehousing, and specifically the role of human behavior in operational activities, is a nascent area with a small, but growing, body of literature. As we want to generate a holistic and accurate understanding for this matter, we rely on multi-method approaches which are imperative in such cases (see e.g., Flick et al. (Citation2004); Boyer and Swink (Citation2008)). Further, Lewis-Beck et al., (Citation2004, p. 1142) argue that using methodological triangulation when probing issues “offers the prospect of enhanced confidence” in the ensuing findings. Consequently, we triangulate three research methods for issue identification (see ). We first follow well-established guidelines for emerging topics (Webster and Watson, Citation2002) and start with the development of a conceptual foundation, which is based on central theories in related fields of OM, BS and human–machine interaction. This research step delivers the foundation for the systematic framework in Section 3, which denotes the relationships among important building blocks of human–machine interactions in warehousing. Second, we conduct expert interviews with practitioners from industry to identify the most important human–machine interactions and associated behavioral issues as recommended by Edmondson and Mcmanus (Citation2007). These empirical findings build the main source to derive seven categories (each category represents one issue). Section 4 is then structured along the seven issues. A systematic literature review is the last, pivotal step to deepen links among managerial issues and existing work (DeHoratius and Rabinovich, Citation2011). We identify 13 articles that are matched to the identified issues. Only the continuous and comprehensive triangulation of these sources provides the opportunity to structurally identify and analyze relevant issues, create a comprehensive research agenda, and ultimately develop overarching theoretical foundations and unifying themes. For details on the research approach please see Appendix A in the supplementary material.
Figure 4. Overview of research methodology applied.
3. Systematic framework to investigate human–machine interactions in warehouses
The systematic framework is designed to structure the investigation of issues by providing a set of important components for human–machine interactions in warehousing and its interconnections. It synthesizes seminal literature and theories from machine-centric OM, human-centric BS, and human–machine interactions outside the warehouse domain. As human–machine interactions in warehousing constitutes a novel area, this exposure to conceptual foundations is essential for comprehensive and structured future research. As such, it constitutes the first contribution of our study and is applied to our analysis at the same time. In this way, we ensure an end-to-end perspective, create a suitable structure for the issue investigation, and uncover open research. We identify important building blocks to discuss behavioral issues which are summarized in . For the (i) description of interaction, it is necessary to analyze involved automated and robotized systems, operational warehouse activities and corresponding interaction setups. Subsequently to the (ii) identification of issues mainly driven by expert interviews, we follow with the (iii) characterization of those with involved human factors and behavior. Finally, the interaction and associated issue have (iv) consequences on system performance.
Figure 5. Framework to investigate behavioral issues of human–machine interactions.
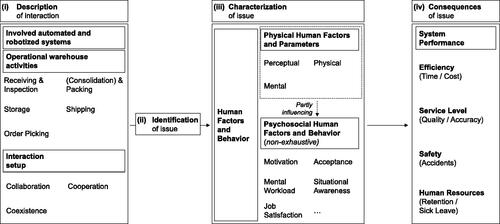
(i) Description of interaction
We regard interactions between at least one human worker and one or multiple involved automated or robotized systems. Automated systems are defined as machines that carry out a function by themselves that was previously performed by a human (Parasuraman and Riley, Citation1997). Additionally, physical robots or robotic devices are able to perform tasks with a certain degree of autonomy, and may be able to move within a specific environment (ISO, Citation2012). In addition to these robotized systems, we also regard embedded artificial intelligence in machines as fitting systems for our analysis (Glikson and Woolley, Citation2020). For an overview we refer to Azadeh et al. (Citation2019), Boysen et al. (Citation2019), Boysen et al. (Citation2021) and Fragapane et al. (Citation2021) who cover many potential systems involved. As we deal with human–machine interactions in operational warehouse activities for physical flow, we exclude instances in which humans modify standard workflows without any significant interaction with the machine (e.g., changing picking route).
The main blue-collar, operational warehouse activities are receiving and inspection, storing, order picking, packing and shipping (De Koster et al., Citation2007). Receiving and inspection includes the unloading of products from the delivery vehicle, checking for any quantity or quality inconsistency, and entering master data into the warehousing management system. Additionally, it contains the handling of returns. Subsequently, incoming or returned products are transferred from the unloading to designated put away areas. This process may also include any re-packaging before storing the goods. Once customer orders arrive, the process of order picking consists of retrieving the right products from storage. This may include batching, routing and sequencing. After goods have been retrieved, they are packed (and potentially categorized) for delivery before being shipped to customers. Note that in some cases it is necessary to consolidate orders before packing (e.g., if batch picking is utilized). Packing activities cover boxing or palletizing, packaging (e.g., to protect from transport damage), value-added services (such as labelling, serialization, kitting), or a final quality check. Ultimately, the products are loaded onto the means of transportation to be shipped to the customers or the next step of the supply chain. Similar to Gu et al. (Citation2007), shipping activities are included in our discussion on receiving and inspection.
The interaction setup classifies interactions along proximity and dependency (Schmidtler et al., Citation2015). In the least intense form, coexistence, the interaction takes place in the same space and time. In cooperation setups, humans and machines also work jointly on the same aim. Collaboration additionally requires physical contact. To translate this for our purposes, we define the space and time as the same warehouse zone and shift. The condition of the same aim is fulfilled if humans and machines work on the same job (e.g., customer order). For physical contact, we consider actions that include either direct physical contact (e.g., wearing a device) or handovers.
(ii) Identification of issue
We analyze the described interactions and identify potential behavioral issues based on our expert interviews and theoretical BS foundations. We develop open research questions using the following characterization and consequences of the framework elements.
(iii) Characterization of issue
Human factors and behavior are the core of the investigation of human–machine interactions. We base our analysis on human factors theory (Sanders and McCormick, Citation1993; Karwowski, Citation2005; Salvendy, Citation2012) and behavioral aspects (e.g., Gino and Pisano (Citation2008)). As a first step, a differentiation needs to be made between physical human factors and parameters and psychosocial human factors and behavior (Karwowski, Citation2005). The former are clustered into perceptual, mental and physical. Perceptual parameters include seeing, hearing or perceiving other agents (i.e., humans or machines). Mental or cognitive parameters are processes such as remembering, thinking, judging, decision-making or reasoning. Finally, physical parameters are connected to human movements or activity, such as using body parts, operating, walking or carrying. These physical human factors and parameters are determined by the interaction among humans and machines. Additionally, they may impact and change psychosocial factors and behavior (Karwowski, Citation2005). These include, but are not limited to, motivation, acceptance, workload, stress, situational awareness, job satisfaction, trust, reaction to incentives or fairness (see Boudreau et al. (Citation2003), Loch and Wu (Citation2005), Gino and Pisano (Citation2008), Parasuraman et al. (Citation2008) or Glikson and Woolley (Citation2020) for examples). The degree and magnitude of these behavioral aspects may also be decisive for resulting actions and decisions (including biases and heuristics, see Udenio et al. (Citation2017) for instance), and depend on individual human characteristics (such as personality types).
(iv) Consequences of issue
The final outcome of the interaction is assessed using system performance criteria. For direct measures, a differentiation is made among efficiency and service-level (Staudt et al., Citation2015). Efficiency measures include the time (such as processing or lead time) or cost of a certain warehouse activity (e.g., the number of order lines picked per time and cost unit). Service level criteria include the quality (e.g., shipped orders without damages) or accuracy (e.g., share of orders delivery without errors). Further, safety metrics (such as number of occupational accidents, see De Koster et al. (Citation2011) and De Vries et al. (Citation2016c)) are another performance criterion as safety issues among blue-collar workers are common, especially in the logistics sector. Finally, we consider criteria for human resource management, such as retention or number of sick days. These performance criteria are regarded to acknowledge and account for the impact of human well-being.
The different parts of the systematic framework are utilized in the following to structure the issue analysis in the next section.
4. Behavioral issues in human–machine interactions
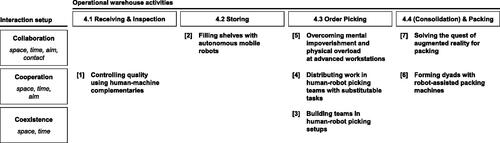
This section discusses seven issues that have been identified. orders the issues based on the elements operational warehousing activity and interaction setup of step (i) of our systematic framework. We structure the discussion of concrete behavioral issues along those two dimensions, where we use a subsection for each operational activity. Each subsection starts with the (i) description of the interaction with involved automated and robotized systems. Along the interaction setup, we continue with the (ii) identification of associated issues, including potential open research questions for each issue. Following with the (iii) characterization and (iv) consequences of those issues, we provide theoretical and managerial insights involving human factors and behavior and impact on system performance based on warehousing and related literature. A number of issues may also be applicable to other activities and the generalization and transfer to those is discussed in Section 5. We formulate the future research questions in a generalizable manner to represent challenges and opportunities across multiple activities.
Figure 6. Overview of behavioral issues identified in human–machine interactions.
4.1. Receiving and inspection: Interactions and issues
The inspection process has important human interactions with automated control machines, whereas receiving processes are either manual or fully automated with no relevant human–machine interactions. As such, we focus here on inspections and quality control.
(i) Description of interactions
Visual inspection systems that are responsible for checking the quantity or quality as well as measuring product-related data have made great advances in recent years, and many automated systems have been installed in warehouses. However, as these systems are often not able to fully cover a large range of products, human operators complement the process with their input on non-feasible or unclear cases, often by receiving an error message that manual help is required. The products in question are either separated and transported on a conveyor belt to a workstation, or the human worker needs to troubleshoot right at the machine. As no direct physical contact with the machine is required, but the human operator and the machine work on the same incoming products in these instances, the interaction is classified as a cooperation setup.
(ii) Issue identification - Controlling quality using human–machine complementarities
Warehouse operators and system providers made it clear in their interviews that leveraging the complementary strengths when checking the quality (e.g., identifying defects), quantity or dimensions of incoming products attains higher performance, and is crucial to establishing efficient operating policies. As an example, one warehousing manager [12WO] highlighted the need to combine both human and machine skills:
We are able to process the basic products with our automated inspection machine. However, we still rely on one additional employee when it comes to SKUs that are hard to distinguish for the machine, for example, if it is a small defect or natural variation, fragile or inconsistent, or unknown such as promotional products.
Humans thus complement the machine’s ability, function as the final decision maker by judging whether the products meet pre-defined criteria, and act as a supervisor or troubleshooter. Such hybrid settings are needed in many cases, as neither unaided humans nor full automation is as effective as combined work. As humans enhance the process through advantages in flexibility and skill ranges, the following research questions evoke:
[1.1] What is the impact of setup choices (such as communication, control criteria and process order) on performance, and what are the underlying mechanisms and psychological factors?
[1.2] What is the degree of perceived transparency and feedback influencing inspection performance, what behavioral aspects may explain individual reactions to those factors, and why?
(iii) Characterization and (iv) Consequences of issue
Building on knowledge from cognate applications in OM, decision-making biases (such as anchoring) may be present when troubleshooting is required. Setup choices that influence these include the communication (e.g., should the machine give a recommendation when delegating), distribution of the products (e.g., which products should be delegated to the human based on experience) or the design of the control criteria (e.g., unrealistic or complex accept or reject criteria).
The behavioral influence of these choices need to be analyzed and may depend on individual characteristics of the employees. Some may be prone to anchoring biases, some may be robust to potential false indications of the machines, and some tend to lower their effort by exhibiting a high degree of automation complacency (Parasuraman and Manzey, Citation2010). It is also important to understand the order of the process to decrease throughput times (e.g., when should the human pro-actively prepare incoming goods for the inspection machine due to bulky items or broken pallets). As in similar setups inspection systems show better performance when combining human and machine skills (see See et al. (Citation2017) for instance), it is necessary to find the optimal incorporation of the above-mentioned setup choices to stimulate human action and also minimize inspection errors in warehousing settings. Moreover, human motivation, mood and satisfaction can be impacted in this process (Bainbridge, Citation2002; Lughofer et al., Citation2009). For example, system performance increases when operators know that their input will be included in the algorithm of the system ex-ante (Lughofer et al., Citation2009), or when they feel a machine is making intelligible decisions (Kellogg et al., Citation2020). Motivation may be particularly impacted by the technical architecture (Bendoly et al., Citation2010). As such, the ability to provide feedback to the machine and to the operator is crucial to increase the interest and willingness for smooth joint work, and emphasizes the machine’s ability to learn from the human as an expert (Kadir and Broberg, Citation2020). Also, it is important to create cognitive and emotional trust to enhance the success of automation integration, particularly by achieving high system transparency and reliability (Glikson and Woolley, Citation2020). Clearly, analyzing setup choices, process order and motivational, trust and feedback aspects are promising starting points for future research. Note that in some cases this inspection activity may also be classified as collaboration depending on the specific machine that is utilized.
4.2. Storing: Interactions and issues
Instead of storing goods either manually with a forklift or with Automated Storage and Retrieval Systems (AS/RS), semi-automated solutions are utilized that result in significant interactions between humans workers and automated or robotized storing systems.
(i) Description of interactions
In such a hybrid setup, humans are supported in filling storage shelves by Automated Guided Vehicles (AGVs) or Autonomous Mobile Robots (AMRs). As main aspects of the following discussion are connected to AGVs and AMRs, the findings may also be applicable for order picking as the reverse application to storing. In general, these machines transport the products when traveling through the aisles next to shelves (Fragapane et al., Citation2021). In some cases, certain types offer a seating possibility, or even assume the lifting aspect of the storing activity (via a robotic arm or lift). Both the flexibility of the human operator to store a variety of products on shelves and the technological advances of the machines can be leveraged in such systems. This is particularly suitable when individual items need to be handled instead of full pallets. Examples of applications include spare parts warehouses, micro fulfillment centers, and supermarket shelves. Such hybrid approaches require the hand-over of products from machine to human, and we therefore focus in the following on a collaboration setup.
(ii) Issue identification - [2] Filling shelves with AMRs
As the replenishment process frequently accounts for a large share of working time of employees (Boywitz et al., Citation2019), the efficient orchestration of human and machine leads to several open research questions:
[2.1] What are optimal design choices of collaborative robots for replenishing products, and how and why do psychosocial factors, incentive schemes or personality traits influence such setups?
[2.2] Which incentive schemes or personality traits are beneficial for human employees in a fixed or a floating AMR operational policy, and what mechanisms may explain individual differences?
(iii) Characterization and (iv) Consequences of issue
The operator moves with the robot to the storing locations. The physical put away process is conducted by the human, but strenuous bending down is prevented as the machine elevates the product towards a comfortable position for the human. Finally, the operator needs to decide where to place the product, while the robot supports the human with physically demanding tasks (walking, carrying and lifting the products). Such machines (and in particular their arms and lifts) are able to work in different speed settings, often deviating from natural levels of physical human movement. The robot configuration may thus be limited by human abilities that may differ between individual operators.
As a starting point, Roy and Edan (Citation2018) found out that the working pace or default speed of such robots should be the average working speed of the operator to reduce fatigue and stress. The authors base their judgment on human–human experiments and directly derive the implication from their findings. Although this may hold true for human–human handover tasks, a further analysis needs to be conducted on the human–machine specifics, and most importantly, on their impact on system performance criteria. Further, when evaluating the behavioral benefits of fixed (AMRs are assigned to a specific worker) or free-floating (AMRs serve multiple pickers) policy (Boysen et al., Citation2019), it is important to understand which prove to be more efficient depending on individual personality traits (see De Vries et al. (Citation2016a) for a related manual warehouse example). Sauppé and Mutlu (Citation2015) show that employees like to treat robots as a social entity, eventually boosting the perception of their coworker. A fixed strategy thus may increase individual human acceptance as the machine is assigned to the specific employee and satisfies the desire of monopolizing the support (Gombolay et al., Citation2015). In this light, incentive schemes, that also incorporate potential robot throughput, are interesting research inquiries as they may have a large influence on overall performance. Pasparakis et al. (Citation2021) study another policy option of AMRs: Should the human lead or follow the robot to the picking (or storing) spots. The authors find that for larger efficiency, human leading is superior, whereas greater accuracy is achieved when humans follow the robots. Further, prevention regulatory focus (as a personality traits) moderates the effect of the different policies on pick speed. However, there is no clear theoretical foundation why these concepts should be interrelated, and hence, it would be interesting to understand which other behavioral mechanisms may play a significant role in this setup. Moreover, the underlying slotting strategy also impacts the interaction. For example, humans may improve performance in dedicated approaches, due to learning effects (Weidinger and Boysen, Citation2018a). Additionally, the benefits of exploiting favorable storing (and consequently picking) locations when deciding on the slotting strategy provides further research potential given ergonomic benefits (Petersen et al., Citation2005).
4.3. Order picking: Interactions and issues
Recent warehouse automation efforts have been heavily concentrated on robotized order picking (e.g., Lamballais et al. (Citation2020)), and a large number of companies are offering a variety of systems for this purpose. In particular, focus has been put on minimizing traveling time, as this is the most time-consuming task in the picking activity (Tompkins et al., Citation2010).
(i) Description of interactions
We differentiate between picker-to-parts and parts-to-picker solutions, as well as along the degree of automation (Boysen et al., Citation2019). In picker-to-parts setups, the picker (or in the case of full automation the robot) moves to the storage area to retrieve the products, whereas in parts-to-picker designs the products are carried to the picker by a transportation system. The degree of automation is the ability and intelligence of the machine to fulfill a single picking task autonomously. provides an overview. Note that regardless of the degree of automation, significant interactions exist.
Figure 7. Relevant human–machine interactions at order picking.
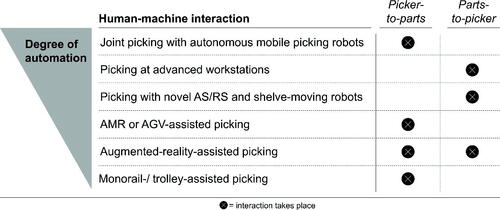
In fully automated picker-to-parts setups, robots are able to fulfill the picking process autonomously without the help of humans (Fottner et al., Citation2021). Interactions occur when employees are deployed in the same area (see ), where both an autonomous mobile picking robot and an operator pick in the same aisle. In semi-automated picker-to-parts setups, AMRs, AGVs or trolleys hanging from a monorail help to reduce travel time by allowing pickers to put items on machines that travel to the base. Additionally, virtual and augmented reality applications can support pickers. These systems indicate instructions using perception (via head-mounted displays for instance). In automated parts-to-picker systems with human interaction, pickers are located at advanced workstations and interact using various interfaces (such as buttons or touch screens). shows an example in which a human operator receives input from a display to pick items from arriving totes. Parts are supplied via AS/RS, pouch sorter, shuttle-based technology or shelve-moving mobile robots (Azadeh et al., Citation2019; Yuan et al., Citation2019; Boysen et al., Citation2021). In the latter case, the robots bring back the shelves to a repository or to the next picker after the successful picking process (Weidinger and Boysen, Citation2018b). Typically, humans fulfill the picking task supported by visualization methods such as pick-to-light. All types of interaction setup are found given the variety of systems and design options available for order picking. We start with an analysis of a coexistence issue, follow with cooperation, and end with the most proximate and dependent setup in a collaboration setup.
(ii) Issue identification - [3] Building teams in human–robot picking setups
Beginning at human interactions with autonomous picking robots, one key challenge revealed in our expert interviews is determining the team structure, that is, how many humans and how many autonomous picking robots to employ for a given picking zone during the same shift: “I will have to form new teams, and this will change the human dynamics significantly depending on how many robots I will include [3WO].” This results in interesting research questions:
[3.1] How does the share of robots impact efficiency and retention of human operators, which behavioral mechanisms govern the differences, and what is the optimal composition and policy in which constellations?
[3.2] Which behavioral traits and skills impact performance when teaming with autonomous robots, what behavioral aspects may explain differences, and why?
(iii) Characterization and (iv) Consequences of issue
In such mixed teams, humans see the robots, hear their noises, and maybe even smell their robotic odour (see ). Humans think about robots as team mates, their role within the team, and how to deal with them. Movements need to be orchestrated to both ensure human safety and robot productivity. Many experts reported different ways employees have of coping with such human–machine coexistence, with one manager [13WO] pointing to unknown consequences: “We do not know yet what the short- and long-term influence on human social components will be when we employ more and more robots.”
Insights from BS regarding team composition in general and for human–machine interactions in particular serve as a starting point to analyze this issue. One key aspect of managing teams is to deal with interpersonal processes such as conflict and affect management or collective motivation building to avoid performance problems (Marks et al., Citation2001). Employees care about human relationships and identify with colleagues (Urda and Loch, Citation2013), and these social interactions have a large impact on motivation and performance (Cantor and Jin, Citation2019). In line with that, Stein and Scholz (Citation2019) encourage automation-oriented diversity management when building groups and Gombolay et al. (Citation2015) establish that people value humans more than robots as team members. Hence, psychosocial factors such as motivation, satisfaction or loyalty of employees may also vary depending on the human–robot team structure in warehouse operations. Additionally, findings about peer effects (Mas and Moretti, Citation2009; Schultz et al., Citation2010; Tan and Netessine, Citation2019) may also exist for such human–machine teaming and impact optimal operating policies. The physical presence of autonomous robots further influences trust and actions, depending on the individual human being (Glikson and Woolley, Citation2020). Consequently, a thorough understanding of which personalities (see Kaplan et al. (Citation2019) for an extroversion example), behavioral traits or skills prove to enhance performance criteria are promising research directions.
(ii) Issue identification - [4] Distributing work in human–robot picking teams with substitutable tasks
System providers and warehouse operators further addressed that allocating or distributing work among humans and robots is an essential topic. For example, one system provider [15SP] raised the question of “which jobs should I give to robots, and which to my [human] employees?” Compared with issue [1] in which humans and machines complement each other for quality control, this topic now deals mainly with the potential substitution of human and machine work forces, also leading to novel research opportunities:
[4.1] Do performance differences between robots and humans have an impact on the performance of humans, and, if so, which psychosocial factors influence the deviations?
[4.2] What might be optimal operating policies for distributing tasks among robots and humans when accounting for human preferences and behavior?
[4.3] Who (human or robot) should distribute tasks, and how does this impact psychosocial factors?
[4.4] Under which conditions should human employees work with lower or higher perceived autonomy (in task execution and allocation) when teaming with robots?
(iii) Characterization and (iv) Consequences of issue
Pickers and robots share the same zone, shift and customer order in such a cooperation. Humans see and hear the robots performing tasks, and consequently question the nature and allocation of the respective jobs (e.g., which items are picked by robots, and which by humans).
A starting point of a behavioral analysis could be to determine both the preference and performance of humans for each specific type of job to decide on the allocation. For the former, this includes an investigation of tasks by product type or location (Larco et al., Citation2017) in terms of human desirability and comfort, also to avoid devaluation feelings (Gombolay et al., Citation2015). In this sense, warehouse managers reported the common phenomenon that employee motivation and performance increased when robots were introduced, but the effect diminished over time. On the other hand, if humans see robots performing the undesirable jobs, psychosocial factors (such as satisfaction or acceptance) are improved. In this case the trade-off with physical, ergonomic job-rotation benefits (see Otto and Battaïa (Citation2017) for an assembly example) needs to be evaluated. For the latter, each human has individual skills (see Matusiak et al. (Citation2017)) that affect performance in different job types. This requires an understanding of the jobs in which human performance is generally lower, and should therefore be transferred to robots (for instance, to promote specialization, see Schultz et al. (Citation2003) in a production setup). Further, Sanders et al. (Citation2019) find that humans tend to distribute a picking task to humans rather than to robots, mainly due to trust issues and the fear of financial loss for the human. Also, as humans value it when their preferences are taken into account (Gombolay et al., Citation2017), it is crucial to analyze the influence on performance criteria depending on whether humans or robots distribute tasks in the warehouse. When humans decide on the allocation, the level of trust in humans and machines has a major impact on the decision-making (Sanders et al., Citation2019). In the reverse setup (i.e., task assignment from a human or an algorithm), Bai et al. (Citation2021) studied the influence on fairness and efficiency. Their results indicate higher perceived fairness when machines are distributing work, even yielding in a persistent boost of picking performance. It remains open how these findings may be different depending on the level of transparency in the distribution process, a significant research opportunity also mentioned by one expert [10WO]. Moreover, Cragg and Loske (Citation2019) compare different picking technologies and find that the lower the human’s experienced work autonomy, the higher the picking efficiency. However, the effects of work autonomy on key performance criteria may have a different degree or even magnitude depending on additional human factors (e.g., mental workload) and individual characteristics (e.g., personality traits) of the subjects. Hence, it is relevant to incorporate such factors in further studies as well.
(ii) Issue identification - [5] Overcoming mental impoverishment and physical overload at advanced workstations
For parts-to-picker setups, a key issue divulging from practice is how to balance mental and physical workload at advanced picking workstations. Warehouse system providers focused in the past on reducing mental workload and achieved progress in improving ergonomics and safety: “We were able to reduce the physical strain and also designed the systems in a manner that limits the necessary input of employees via several ergonomic initiatives,” as a system provider [16SP] reported. However, the reduction of mental workload for humans also led to several psychosocial problems in the mid- and long-term. For example, one warehouse operator [14WO] reported: “Unfortunately we see mental impoverishment of our people at the workstations.” This requires addressing the following research questions:
[5.1] What is the optimal amount of perceived decision-freedom and machine support-level for human operators to avoid mental impoverishment?
[5.2] What is the optimal throughput model to maximize both operational efficiency and psychosocial well-being factors?
[5.3] What are efficient incentive schemes to maximize worker and machine productivity?
[5.4] Does backlog design have an impact on psychosocial factors and performance, and if so, what is the optimal design and why are the underlying mechanisms impacting such setups?
(iii) Characterization and (iv) Consequences of issue
In collaborative interactions at advanced workstations, humans receive visual input from screens, light or voice indications, including the number of items to be picked within a certain time frame. Based on the perceived information, humans perform their picking task, often by putting items from one bin to another, and confirming the operations executed either via buttons or voice commands. shows an example. Usually, the standard processes are predefined and no mental effort is required. Physical effort (such as the speed of movement) is high as companies usually want to maximize machine output. Behavioral analyses show that performance criteria suffer from mental impoverishment, including lower accuracy (despite visual support of the workstation such as pick-to-light, see D’Addona et al. (Citation2018) in a manufacturing example) and retention as jobs are increasingly unattractive: “No one wants to do this job anymore [14W0].” To counteract reduced attention (situational awareness) or job satisfaction as well as increased boredom or fatigue, managers need to innovate the human–machine interaction and account for mental stimulus (for example, by providing more decision autonomy or information, including gamification). Moreover, practitioners (e.g., [1SP] [5C], [7WO]) frequently mentioned mounting performance pressures at workstations. Reported consequences are higher stress and physical overload paired with lower job satisfaction. System performance criteria such as a lower service level (see Kostami and Rajagopalan (Citation2014) for a service operations setting) and increased fluctuation are experienced by interview participants (e.g., [2WO], [15SP], [19WO]). In this sense, Batt and Gallino (Citation2019) find insights on how pick times are reduced when humans are more experienced, proving a great need for higher retention. Another related example is provided by Tan and Netessine (Citation2014), who discover an inverted-U-shaped relationship between workload and performance of service operators. As considering new ways of balancing the physical and mental workload has proven successful in warehousing (see Kudelska and Niedbal (Citation2020), who find decreased mental and physical workload and improved efficiency with shelve-moving robots) and in other settings (see Teigen (Citation1994); Parasuraman et al. (Citation2008); Gombolay et al. (Citation2017); Proctor and van Zandt (Citation2018) or Delasay et al. (Citation2019)) for examples), similar analyses on advanced workstations seem promising. Further, different setups of backlog (or perceived workload) at advanced workstations influence efficiency and even motivation or satisfaction: “We see differences in our shift performance depending on the backlog of open orders on the display at the workstations,” stated a warehouse manager [10WO]. In a related setting, Wang and Zhou (Citation2018) show that workers operate faster in dedicated compared with shared backlogs in a supermarket context, mainly due to the social loafing effect. Delasay et al. (Citation2019) define the relationship between backload and skill level as an open research avenue. Performance criteria are additionally influenced by other design elements, such as displaying backlog privately or publicly. Also at advanced workstations, it is critical to model and understand actual human behavior when analyzing such parameters (see Wang et al. (Citation2021) in their conclusion on human interactions with shelve-moving robots).
4.4. (Consolidation) and packing: Interactions and issues
As order consolidation is not a necessary step in all warehouses, we focus on the packing process in the following. Note that human–machine interactions also exist for consolidation (e.g., with put walls or sorting systems, see Boysen et al. (Citation2022)). Although fully automated packing lines exist, many warehouses run on semi-automated solution with significant human–machine interactions.
(i) Description of interactions
In this article, we differentiate between two main interactions in packing. First, robots and human workers jointly work at a packaging line by distributing tasks for each sub-activity, which results in a cooperative setup. Second, humans are supported by wearing Virtual Reality and Augmented Reality (VR/AR) systems in collaborative interactions. We focus on head-mounted-devices (or AR glasses) as a common application. For instance, AR systems are able to support the operator in the multiple-bin-size bin-packing problem to load parcels onto a pallet or into a truck. Another use case is the selection of the most efficient container (often the one that minimizes material use), but still perfectly packs and protects all the items to be shipped. Note that AR glasses are also used for picking (pick-by-vision) and findings may be transferable (see Egger and Masood (Citation2020) for an overview).
(ii) Issue identification - Forming dyads with robot-assisted packing machines
When deciding on semi-automated packing lines, warehouse managers are faced with the decision on which sub-activity to assign to robots and how to design the interaction among humans and machines. In such hybrid work cells, robots take the role of the helping hand for the humans when packing a container for delivery, leading to open research questions:
[6.1] Which sub-activity should be performed by robots and which by humans based on individual personality types and skills, and what is the allocation mechanism?
[6.2] Do perceptional factors of robots impact mental workload and system performance, and if so, why?
(iii) Characterization and (iv) Consequences of issue
In such interactions, humans and robots operate in the same space to finalize orders. Workers see, hear, and exchange information with the packing machines. Their new coworker focuses on routine tasks without showing any fatigue (such as erecting the cartons or sorting the products), whereas humans excel by performing activities that do not always follow structured patterns (such as troubleshooting (Banerjee et al., Citation2015) or special labeling). When switching from a robot sub-task to a human sub-task (or vice versa), interactions need to be orchestrated and adjusted to fit both the technical skills of the robot and the natural physical movements of the human. Humans need to anticipate and understand why a robot is reacting and behaving in a particular way. This is crucial to mentally anticipate the next move of the robot to ensure safe standard operating procedures.
Banerjee et al. (Citation2015) conduct human–robot kitting experiments and achieve faster execution times and comparable quality by implementing visual indication when human troubleshooting is required. By letting the robot assume repetitive tasks, physical workload is reduced and task duration times lowered. Maettig and Kretschmer (Citation2019) and Maettig et al. (Citation2019) also study the influence of visual indications in a packaging line by minimizing the perceived information to reduce mental workload and improve quality. As the reduction of mental workload or difficulty may evoke different consequences for different people (Schulz et al., Citation2018), it still remains open which sub-activity of the packing process should be performed by a robot, depending on personality traits, human knowledge or skill. Further, if we assume that the order of tasks within packing is fixed (due to the line setup), and robots and humans jointly solve a task (e.g., robot erects the carton, humans inserts items, robot seals it), humans prefer to work with robots that are pro-active (they know and prepare which task to do next) and information- or intent-sharing (Baraglia et al., Citation2016). Humans also favor leading the interaction, except when mental workload is high (Schulz et al., Citation2018). The overall setup consequently impacts psychosocial factors such as job satisfaction as well as both physical and mental workload, leading to interesting research possibilities on the influences on performance criteria (e.g., throughput times of the packing line). In addition to that, cooperating (or in some instances also collaborating) in such a close proximity with robots may influence perceptual factors (such as noise levels) in the warehouse, and this consequently also needs to be addressed. Regarding the above-mentioned multiple-bin-size bin-packing problem, Sun et al. (Citation2021) observe that humans deviate from algorithmic suggestions due to superior information or complexity issues. They install a human-centric intervention that incorporates such anticipated deviations, leading to a reduction of deviations and an improved performance. Future research may explore the observed worker heterogeneity (e.g., in terms of traits or preferences) or the possibility to provide additional information. One possible way for this are AR devices, which we discuss next.
(ii) Issue identification - Solving the quest of AR for packing
Mark Zuckerberg, the CEO of Facebook, expects AR glasses to redefine the relationship with technology (CNBC, Citation2020), and many collaborative AR applications already exist for packing and other activities (see Stoltz et al. (Citation2017) for an overview). However, for extensive implementations and safe interactions, the following research questions need to be answered:
[7.1] How can human factors be improved when operating AR devices, what is the performance impact of such behavioral aspects depending on individual workers, and why?
[7.2] What are optimal operating policies (e.g., which tasks to conduct) for operational activities when incorporating preferences and psychosocial effects of employees wearing AR devices?
(iii) Characterization and (iv) Consequences of issue
Using AR, the operator sees through the head-mounted device and receives the respective information on the display. These may be the location where to put an item, or which container to choose based on a pre-selection. The human is required to process the information and to act on given instructions (such as putting items into a bin or erecting the carton). In some cases voice commands, gesture or touch screen input are required, depending on the type of AR support.
Three related experiments offer starting points to find answers to the above-mentioned questions. Stoltz et al. (Citation2017) analyze human factors and behavior in a parcel-categorizing task using a head-mounted device, while Kretschmer et al. (Citation2018) and their follow-up study in Plewan et al. (Citation2021) investigate the performance and usability of an AR head-mounted device for palletization. The authors compare the systems to traditional approaches (such as paper-based or tablet methods) in all three setups. Stoltz et al. (Citation2017) encounter a potential ephemeral motivational effect given the novelty of the AR glass and the useful information displayed, linking to reduced mental workload as the decision-making processes are assumed by the machine. In line with this, Kretschmer et al. (Citation2018) find a lower mental and temporal demand and experienced effort, but no significant reduction in perceived workload, which is confirmed by Plewan et al. (Citation2021). Note that the results indicate that workload was lowest for the AR condition despite the missing effect significance. Regarding usability, Kretschmer et al. (Citation2018) and Plewan et al. (Citation2021) report lower scores compared with traditional approaches, resulting in a key challenge for practitioners. Interestingly, performance metrics vary across the studies. Although Stoltz et al. (Citation2017) and Plewan et al. (Citation2021) find improvement in quality, time (as the efficiency indicator) is not reduced in Kretschmer et al. (Citation2018), and is even negatively impacted in Stoltz et al. (Citation2017) and Plewan et al. (Citation2021). Concluding, it is evident that AR devices help to increase the quality, but efficiency criteria need to be assessed further. In particular, relationships with perceived mental and physical workload, usability and acceptance seem visible, and are also of highest relevance (Masood and Egger, Citation2019). Wearing a head-mounted device for a whole shift increases physical workload, and users are visually limited and may be distracted due to visual and audio information. Thus, situational awareness and consequently safety is negatively impacted (see Aromaa et al. (Citation2020) in a related lab experiment). Also, understanding the long-term motivational effect given lower decision discretion and competence requirements needs to be understood, and findings are always dependable on the individual hardware, subjects, and their personalities (see De Vries et al. (Citation2016b)). In any case, there are many possibilities to further conduct field experiments with real warehousing workers to answer the above-mentioned questions and assess movement towards the expectations voiced by Zuckerberg.
5. Theoretical foundations and unifying themes
This section provides an aggregated view on the empirical findings through a behavioral lens. In our systematic framework, we characterized each human–machine interaction by its setup components space, time, aim, and contact. We now develop theoretical foundations by discussing which behavioral theory informs potential effects based on each interaction setup component. By combining the theoretical foundations with both our insights obtained in the previous section and further coding of our data sources, we derive a set of four unifying themes (A)-(D) for the warehousing context. Each theme illustrates a common behavioral aspect relevant in human–machine interactions in warehousing across operational activities. The theoretical foundations underpin unifying themes with prevalent behavioral theories to highlight the causalities among the various interconnections (such as interaction setup and human factors). summarizes those connections, and delineates links to issues, interviews and literature.
Figure 8. Overview of theoretical foundations and unifying themes.

Table 1. Interconnection among unifying themes, issues and data sources.
In the following, along the unifying themes, we elaborate on behavioral theories connected to the interaction setup components, and outline which behavioral aspects and mechanisms play a significant role. We further specify our findings from our empirical observations regarding the respective unifying theme. By highlighting which human factors are salient to which consequences, we show causal relationships for research going forward.
(A) Hiring and training the right human employees for the right human–machine interaction
As the human–machine interaction is happening in the same space and time, humans react to the presence of automated machines and robots in warehouses, and hence, theories of cognitive psychology and individual differences of employees inform human behavior within interactions (Croson et al., Citation2013; Kihlstrom and Park, Citation2018). Particularly, aspects such as personality traits, preferences and skills vary among humans (Donohue et al., Citation2020), and thus, play a crucial role in managing efficient warehouse setups. The vast majority of interviewees emphasized the need to hire, train, and employ suitable humans, depending on the operational task at hand (see ). The required skills include, but are not limited to, professional (e.g., programming capabilities for warehousing robots), methodological (e.g., trouble-shooting skills to resolve workstation blockages), and personal competencies (e.g., eagerness to adapt to adjusted tasks). This preference and competence-based view is required to account for the heterogeneity and individual differences of employees, and necessary as job profiles are changing given adjusted or novel activities in human–machine interactions with automated or robotized systems (also driven by the rise of specific types of warehouses such as fulfillment centers for e-commerce, see Boysen et al. (Citation2019)). Examples for salient relationships exist in the moderating effect of specific traits and preferences on efficiency (see Pasparakis et al. (Citation2021) for a picking example) and retention, potentially triggered by differences in human motivation and satisfaction. Further, recognizing an individual’s skill set is important to understand which worker to deploy for which task, as individual human performance varies even in standardized activities (see Matusiak et al. (Citation2017) for a related picking study). Given high fluctuation rates in general, and large temporary labor needs during peak demand periods, it is crucial to learn how to attract and retain labor for human–machine interactions. Hence, analyzing this first theme certainly leads to important understandings around individual differences that can be utilized to hire and train the right human at the right interaction across warehousing activities.
(B) Forming effective human–machine warehousing teams
Having new team mates in the same space and time triggers human behavior from social psychology and group dynamics. For instance, theories around trust and (technological) acceptance (Glikson and Woolley, Citation2020) as well as peer-effects (Tan and Netessine, Citation2019) inform the behavior within the group, and consequently also the outcome of the human–machine interaction. To manage effective human–machine teams, interviewees describe trust and acceptance as key success factors to efficiently implement warehouse automation. This has been further accentuated by several practitioners who have reported failed automation attempts, with large negative outcomes on system performance, solely due to a lack of trust and acceptance by humans. Salient factors to consider are in particular perceptual factors (e.g., how robots are perceived and introduced) and their relationship to trust and acceptance of the employees in warehouse interactions. It is important how team or firm loyalty may vary given emerging human–machine setups, and how this moderates efficiency (potentially changed due to peer effects) and particularly retention. Only by including such behavioral mechanisms into optimization efforts will ensure to build efficient teams in the warehouse of the future.
As space and time are by nature components of coexistence, cooperation, and collaboration setups, themes (A) and (B) are of relevance for all human–machine interactions.
(C) Assigning tasks and developing operating policies among humans and machines
Adding the interaction component aim sparks further mechanisms from social psychology. In particular, the same aim creates (task) interdependence, making the performance of humans and machines dependent on reciprocal actions (Bendoly et al., Citation2010). Thus, humans compare themselves with the machines, show social preferences (for example, in task distribution or job execution), and react to process information and setup choices (see Loch and Wu (Citation2005) and Gombolay et al. (Citation2017) for related examples). The insights from practice regarding task assignment and policy development show that addressing how to best leverage the strengths of humans and machines, how to distribute the workload within human–robot teams, and how to design the workflow (such as communication and operating policies) becomes indispensable. When solving related issues, mental factors are salient as humans think about the tasks, process and setup choices (e.g., information provision). In this way, feedback, transparency and perceived autonomy influence motivation and satisfaction, and moderate the effect on performance in warehouses. This constitutes the pathway to explore different avenues in cooperation and collaboration setups, such as, the role of above-mentioned factors in substitutable versus complementary tasks.
(D) Designing engaging direct human–machine interactions
Direct contact provokes further behavioral mechanisms from social psychology and physical environment (Vischer, Citation2007; Bendoly et al., Citation2010). Specifically, theories explaining behavioral factors such as engagement (e.g., goal-setting theory or incentive theory), workload (e.g., speed–accuracy trade-off) and situational awareness inform interactions, particularly in collaboration setups. Insights from the interviews show that, with increasing automation, experts see issues around designing engaging interactions and thus, struggle to create an attractive workplace for human employees in warehouses. Although in cooperation setups mental and physical workload are mostly regarded separated, the direct contact among human and machines makes the balance of both factors a key relationship to optimize. For example, high physical workload (or speed-up pressure, see Schultz et al. (Citation2003) or Wang and Zhou (Citation2018)) and low mental workload may both reduce efficiency and quality. Hence, finding the optimal equilibrium (e.g., by adjusting decision-discretion) is a key area of future research. Goal-setting and incentive theories are starting points to inform more engaging (for higher usability and efficiency) and more sustainable (for higher retention) solutions. On top of that, a salient relationship exists between situational awareness and quality or safety (e.g., see Aromaa et al. (Citation2020) for a related lab experiment), and needs to be taken into account when designing attractive interactions.
To summarize, the unifying themes (A)-(D) provide an aggregated view on the detailed issue discussion in Section 4, while the prevailing theories constitute the foundation for human–machine interaction research in warehousing going forward. This offers a cohesive body of knowledge to better understand causalities within human–machine interactions and to ultimately provide more efficient warehousing setups when behavioral factors are influencing the system and its performance. Addressing the research questions for the specific issues will therefore also result in transferable findings to other issues. The main rationale for this generalization materializes from analogous behavioral mechanisms that are triggered through similar interaction setups and, in some cases, systems involved. For instance, findings on fixed versus floating AMR policies when storing shelves [RQ 2.2] may be transferred to picking as the interaction setup and systems are comparable. Further, results on backlog design studies at advanced workstations for picking [RQ 5.4] are applicable for receiving and inspection, as well as packing applications, due to the potentially similar setup of the system and interaction. Also, insights on efficient operational policies that incorporate human usability and situational awareness when packing with AR glasses [RQ 7.2] are transferable to picking tasks. These three examples and the comprehensive overview in Appendix B in the supplementary material indicate that findings generated for one issue provide opportunities in additional activities.
6. Conclusion
Interactions between human operators and automated or robotized systems in the warehouse are developing into a multi-disciplinary field of research. This has recently evolved and gained momentum due to the rapid growth of automation in logistics. As humans still excel in specific tasks due to flexible skills and economic advantages, new issues related to the role of workers in warehousing and in operations of the future have emerged. To optimize system design and operations, it has become essential to investigate human–machine interactions in operational warehouse activities. This article develops the pathway to necessary research within this nascent research area by identifying key interactions, corresponding behavioral issues, theoretical foundations, and unifying themes. We first developed a systematic framework to investigate issues in such interactions, and additionally presented our empirical findings from expert discussions. The developed research agenda unfolds open areas and related questions to better manage human–machine interactions in automated warehouses. The analysis of the warehousing literature revealed significant gaps across the identified issues. In addition to the novelty of the warehousing systems involved, a predominant reason is the research focus on either OM or BS, but interdisciplinary methods are missing to tackle those behavioral issues. It becomes evident that more synergistic approaches among OM and BS are required. Hence, we enriched the discussion to allow a cross-disciplinary perspective, which is in line with the call for interdisciplinary OM and BS research in Moniz and Krings (Citation2016). We elaborated specifically on the type of human–machine interaction setup, and how its component are connected with prevailing theories. This overarching theoretical foundation particularly informs four emerging unifying themes for human–machine interactions in warehousing going forward. To conclude, we outline managerial and theoretical implications, and provide limitations as well as an outlook of our study.
6.1. Managerial and theoretical implications
Insights on the identified issues and themes could inspire practitioners when designing and planning modern warehouses. For example, the implications help warehouse systems providers and engineers to design better products (such as incorporating behavioral findings in design and setup choices of advanced workstations) and assist warehouse managers with better decision-making by accounting for human–machine interaction effects (such as hiring employees with a specific skill set or deciding on the type and number of robots for a team). These findings can also enhance project managers’ awareness of behavioral issues when drafting implementation projects for warehouse automation (overcoming motivation and acceptance issues, for instance). Ultimately, insights into the issues and themes will facilitate the application of efficient OM models and tools that are grounded in empirical observations and behavioral theories, aimed at increasing system performance via enhanced human–machine interaction and associated factors. Furthermore, we demonstrate that interactions with systems of a robotic nature are prevalent, showing the enhanced relevance of autonomy in intralogistics (see Fottner et al. (Citation2021)), also given their flexibility and scalability. Hence, managers need to prepare themselves and their teams for further human–robot interactions. Moreover, as unifying themes exist across activities, it is crucial to optimize interactions beyond picking (i.e., the activity with the largest cost share), as focusing on one individual activity may create bottlenecks in others, leaving behind untapped opportunities for improving an efficient material and information flow, and making a holistic research approach necessary (see also Boysen et al. (Citation2021) or Van Gils et al. (Citation2018)).
The systematic framework, theoretical foundation, and unifying themes also build a structure to advance human–machine interaction research. They can be applied in other contexts, particularly in both different activity levels and related OM fields. For the former, they can be transferred to the analysis of non-operational warehousing activities (such as interactions with intelligent maintenance software in automated warehouses). For the latter, the concepts remain valid for manufacturing (e.g., collaboration with assembly robots), transportation (e.g., supervising automated truck driving), health care (e.g., interactions with care robots) or other applications in supply chain management (see Perera et al. (Citation2019) for a forecasting example). Consequently, this work opens up a broad variety of relevant topics as human–machine interaction continues to progress in many OM fields.
When finding solutions to above-mentioned issues and unifying themes, blending research of machine-centric OM with human-centric BS by applying the systematic framework and theoretical foundations is vital to establish efficient human–machine interactions in the warehouse. In order to enhance decision-making as well as OM principles and theories for such interactions, it is also important to utilize a variety of methods to address the research questions proposed. Although we acknowledge that selected issues may be resolved using a single method, it becomes indispensable to apply an integrated research approach for the majority. This requires utilizing quantitative methods (such as simulation, optimization or analytics) and transferring principles from OM to human–machine interactions. These need to be based on empirical insights using experimental and field research or surveys to capture the actual behavior of agents involved and test existing and nascent theories (DeHoratius and Rabinovich, Citation2011). Using our developed systematic framework and theoretical foundation, the combination of both lenses will inform OM models, theories and principles (Bendoly et al., Citation2006), which ultimately enhances system performance to a greater extent. We refer to Appendix B in the supplementary material for two examples how future research can take such an integrated path.
6.2. Limitations and outlook
The list of research questions in one paper can never be exhaustive. We mitigate this problem by conducting expert interviews to detect the most relevant issues to explore this emerging field. By the design of this research, we have concentrated our efforts on blue-collar, operational activities and have not extended our perspective on white-collar planning tasks (whether tactical or strategic). For instance, in control rooms of automated warehouses, a common issue is overwriting optimal parameters for automated systems by operators. This often happens based on individual human preferences, or unknown information. Consequently, future work could explore issues in these directions. Additionally, we did not focus on integrative topics for human–machine interactions when the systems are in the early phase of technological developments and implementation. However, the systematic framework, theoretical foundation, and unifying themes can also serve to solve such matters including the alignment of human-machine navigation (e.g., how to avoid the dominance of humans at intersections with AMRs), the supervision of robotic systems such as inventory counting drones (e.g., how to deal with low situational awareness), and the integration of robotic exoskeletons (e.g., how to increase the acceptance and usability of such supportive devices). Moreover, due to the novelty of the systems and interactions, it is not yet possible to derive any inference on the long-term implications driven by behavioral mechanisms, which constitutes a further research opportunity.
In conclusion, we see growing opportunities for managerially relevant and theoretically challenging investigations in the field of human–machine interactions in general, and in the context of warehousing in particular. Elon Musk, CEO of Tesla Inc. and one of the strongest advocates of technologically induced change, fittingly said: “Humans are underrated.” It was a reaction to over-automation without balancing human and machine skills at Tesla’s production facility in California (Edwards and Edwards, Citation2018). Our contribution will serve to stimulate this line of research and further enhance the blending of novel automated or robotized warehousing systems with human factors and behavior.
Reproducibility Report
Download PDF (31.1 KB)IISE_Lorson_et_al.__2022__Supplementary_Material
Download PDF (373.2 KB)Acknowledgments
We thank the experts involved in our interviews for sharing important information and insights on the topic. We highly appreciate the valuable suggestions provided by the editorial team and reviewers.
Additional information
Notes on contributors

Fabian Lorson
Fabian Lorson is a research associate and doctoral student at the Supply and Value Chain Management at the Technical University Munich (TUM) Germany. He holds a double Master’s degree (MSc) in Business Administration/Supply Chain Management from the University of Cologne and the CEMS Alliance. Before his doctorate he worked for one of the top management consultancies. In particular, he advised industrial clients on warehousing and distribution efforts. Fabian Lorson currently works on several collaborations of the TUM with leading retailers and warehouse system providers. In his research, Fabian focuses on warehouse automation and the behavioral implications of human-machine interactions with novel automated and robotized warehousing systems.

Andreas Fügener
Prof. Dr. Andreas Fügener is an Associate Professor for Digital Supply Chain Management at the University of Cologne in Germany, where he also completed his Assistant Professorship. Prof. Fügener holds a PhD (2013) from the Technical University Munich (TUM), a Diploma in Business Administration from the Catholic University of Eichstätt-Ingolstadt, and a Master of Science in Mathematics from the Fernuniversität Hagen. He held a post-doc position at the University of Augsburg. He served as a management consultant working in the industry of automotive, financial services, and energy. His main research interests cover the interface of human and artificial intelligence in decision making.

Alexander Hübner
Prof. Dr. Alexander Hübner is a tenured Full Professor for Supply and Value Chain Management at the Technical University Munich (TUM) in Germany. Prof. Hübner holds a PhD (2011) and a Diploma in Business Administration from the Catholic University of Eichstätt-Ingolstadt, where he also completed his Assistant Professorship. He then moved to the Massachusetts Institute of Technology (MIT), where he was Associate Professor for Logistics and Supply Chain Management at the Luxembourg Centre of Logistics. Before joining the TUM, he headed the Institute for Supply Chain Management at the European Business School in Oestrich-Winkel. He also worked as a Project Manager with a top management consultancy serving retail and consumer goods clients (2005–2012).
References
- Aromaa, S. , Väätänen, A. , Aaltonen, I. , Goriachev, V. , Helin, K. and Karjalainen, J. (2020) Awareness of the real-world environment when using augmented reality head-mounted display. Applied Ergonomics , 88 , 103145.
- Azadeh, K. , de Koster, R. and Roy, D. (2019) Robotized and automated warehouse systems: Review and recent developments. Transportation Science , 53 (4), 917–945.
- Bai, B. , Dai, H. , Zhang, D. , Zhang, F. and Hu, H. (2021) The impacts of algorithmic work assignment on fairness perceptions and productivity. Academy of Management Proceedings, 2021 (1), 12335.
- Bainbridge, H. (2002) Best Practice for the Procurement and Conduct of Non-destructive Testing . Health and Safety Executive, Battle, UK.
- Banerjee, A.G. , Barnes, A. , Kaipa, K.N. , Liu, J. , Shriyam, S. , Shah, N. and Gupta, S.K. (2015) An ontology to enable optimized task partitioning in human-robot collaboration for warehouse kitting operations, in Proceedings of SPIE, Next-Generation Robotics II; and Machine Intelligence and Bio-inspired Computation: Theory and Applications IX , SPIE - International Society for Optics and Photonics, Bellingham, WA.
- Baraglia, J. , Cakmak, M. , Nagai, Y. , Rao, R. and Asada, M. (2016) Initiative in robot assistance during collaborative task execution, in 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI) , pp. 67–74, IEEE, New York.
- Batt, R.J. and Gallino, S. (2019) Finding a needle in a haystack: The effects of searching and learning on pick-worker performance. Management Science , 65 (6), 2624–2645.
- Bendoly, E. , Croson, R. , Goncalves, P. and Schultz, K. (2010) Bodies of knowledge for research in behavioral operations. Production and Operations Management , 19 (4), 434–452.
- Bendoly, E. , Donohue, K. and Schultz, K.L. (2006) Behavior in operations management: Assessing recent findings and revisiting old assumptions. Journal of Operations Management , 24 (6), 737–752.
- Boudreau, J. , Hopp, W. , McClain, J.O. and Thomas, L.J. (2003) On the interface between operations and human resources management. Manufacturing & Service Operations Management , 5 (3), 179–202.
- Boyer, K.K. and Swink, M.L. (2008) Empirical elephants–Why multiple methods are essential to quality research in operations and supply chain management. Journal of Operations Management , 26 (3), 338–344.
- Boysen, N. , de Koster, R. and Füßler, D. (2021) The forgotten sons: Warehousing systems for brick-and-mortar retail chains. European Journal of Operational Research , 288 (2), 361–381.
- Boysen, N. , de Koster, R. and Weidinger, F. (2019) Warehousing in the e-commerce era: A survey. European Journal of Operational Research , 277 (2), 396–411.
- Boysen, N. , Konrad, S. and Weidinger, F. (2022) Efficient order consolidation in warehouses: The product-to-order-assignment problem in warehouses with sortation systems. IISE Transactions , 1–13.
- Boywitz, D. , Schwerdfeger, S. and Boysen, N. (2019) Sequencing of picking orders to facilitate the replenishment of A-Frame systems. IISE Transactions , 51 (4), 368–381.
- Cantor, D.E. and Jin, Y. (2019) Theoretical and empirical evidence of behavioral and production line factors that influence helping behavior. Journal of Operations Management , 65 (4), 312–332.
- CNBC (2020) Mark Zuckerberg just made a bold claim: We’re going to get a ‘breakthrough’ in tech glasses this decade. https://www.cnbc.com/2020/01/09/zuckerberg-expects-breakthrough-augmented-reality-glasses-this-decade.html. (accessed 17 September 2020).
- Cragg, T. and Loske, D. (2019) Perceived work autonomy in order picking systems: An empirical analysis. IFAC-PapersOnLine , 52 (13), 1872–1877.
- Croson, R. , Schultz, K. , Siemsen, E. and Yeo, M.L. (2013) Behavioral operations: The state of the field. Journal of Operations Management , 31 (1–2), 1–5.
- D’Addona, D.M. , Bracco, F. , Bettoni, A. , Nishino, N. , Carpanzano, E. and Bruzzone, A.A. (2018) Adaptive automation and human factors in manufacturing: An experimental assessment for a cognitive approach. CIRP Annals , 67 (1), 455–458.
- De Koster, M.B.M. , Roy, D. , Lim, Y.F. and Kumar, S. (2020) Managing autonomous and IoT-driven intralogistics operations: Call for papers. Production and Operations Management . https://www.poms.org/POM%20Special%20Issue%20Autonomous%20IoT-driven%20Order%20Fulfillment-2021.pdf.
- De Koster, R. , Le-Duc, T. and Roodbergen, K.J. (2007) Design and control of warehouse order picking: A literature review. European Journal of Operational Research , 182 (2), 481–501.
- De Koster, R.B. , Stam, D. and Balk, B.M. (2011) Accidents happen: The influence of safety-specific transformational leadership, safety consciousness, and hazard reducing systems on warehouse accidents. Journal of Operations Management , 29 (7–8), 753–765.
- De Vries, J. , de Koster, R. and Stam, D. (2016a) Aligning order picking methods, incentive systems, and regulatory focus to increase performance. Production and Operations Management , 25 (8), 1363–1376.
- De Vries, J. , de Koster, R. and Stam, D. (2016b) Exploring the role of picker personality in predicting picking performance with pick by voice, pick to light and RF-terminal picking. International Journal of Production Research , 54 (8), 2260–2274.
- De Vries, J. , de Koster, R. and Stam, D. (2016c) Safety does not happen by accident: Antecedents to a safer warehouse. Production and Operations Management , 25 (8), 1377–1390.
- DeHoratius, N. and Rabinovich, E. (2011) Field research in operations and supply chain management. Journal of Operations Management , 29 (5), 371–375.
- Delasay, M. , Ingolfsson, A. , Kolfal, B. and Schultz, K. (2019) Load effect on service times. European Journal of Operational Research , 279 (3), 673–686.
- Donohue, K. , Özer, Ö. and Zheng, Y. (2020) Behavioral operations: Past, present, and future. Manufacturing & Service Operations Management , 22 (1), 191–202.
- Edmondson, A.C. and Mcmanus, S.E. (2007) Methodological fit in management field research. Academy of Management Review , 32 (4), 1246–1264.
- Edwards, H. and Edwards, D. (2018) How Tesla “shot itself in the foot” by trying to hyper-automate its factory. https://qz.com/1261214/how-exactly-tesla-shot-itself-in-the-foot-by-trying-to-hyper-automate-its-factory. (accessed 25 June 2020).
- Egger, J. and Masood, T. (2020). Augmented reality in support of intelligent manufacturing – A systematic literature review. Computers & Industrial Engineering , 140 , 106195.
- Flick, U. , von Kardorff, E. and Steinke, I. (Eds.) (2004) A Companion to Qualitative Research , Sage Publications, London, UK.
- Fottner, J. , Clauer, D. , Hormes, F. , Freitag, M. , Beinke, T. , Overmeyer, L. , Gottwald, S.N. , Elbert, R. , Sarnow, T. , Schmidt, T. , Reith, K.B. , Zadek, H. and Thomas, F. (2021) Autonomous systems in intralogistics – State of the art and future research challenges. Logistics Research , 14 (1).
- Fragapane, G. , de Koster, R. , Sgarbossa, F. and Strandhagen, J.O. (2021) Planning and control of autonomous mobile robots for intralogistics: Literature review and research agenda. European Journal of Operational Research , 294(2), 405–426.
- Gino, F. and Pisano, G. (2008) Toward a theory of behavioral operations. Manufacturing & Service Operations Management , 10 (4), 676–691.
- Glikson, E. and Woolley, A.W. (2020) Human trust in artificial intelligence: Review of empirical research. Academy of Management Annals , 14 (2), 627–660.
- Glock, C.H. , Grosse, E.H. , Abedinnia, H. and Emde, S. (2019) An integrated model to improve ergonomic and economic performance in order picking by rotating pallets. European Journal of Operational Research , 273 (2), 516–534.
- Gombolay, M. , Bair, A. , Huang, C. and Shah, J. (2017) Computational design of mixed-initiative human–robot teaming that considers human factors: situational awareness, workload, and workflow preferences. The International Journal of Robotics Research , 36 (5–7), 597–617.
- Gombolay, M.C. , Gutierrez, R.A. , Clarke, S.G. , Sturla, G.F. and Shah, J.A. (2015) Decision-making authority, team efficiency and human worker satisfaction in mixed human–robot teams. Autonomous Robots , 39 (3), 293–312.
- Grosse, E.H. , Glock, C.H. , Jaber, M.Y. and Neumann, W.P. (2015) Incorporating human factors in order picking planning models: Framework and research opportunities. International Journal of Production Research , 53 (3), 695–717.
- Grosse, E.H. , Glock, C.H. and Neumann, W.P. (2017) Human factors in order picking: A content analysis of the literature. International Journal of Production Research , 55 (5), 1260–1276.
- Gu, J. , Goetschalckx, M. and McGinnis, L.F. (2007) Research on warehouse operation: A comprehensive review. European Journal of Operational Research , 177 (1), 1–21.
- Gutelius, B. and Theodore, N. (2019) The future of warehouse work: Technological change in the U.S. logistics industry. Working Partnerships USA, UC Berkeley Labor Center. Available at https://laborcenter.berkeley.edu/pdf/2019/Future-of-Warehouse-Work.pdf. (accessed 17 February 2021).
- IEEE (2020) Symphony of humans and machines or “Modern Times”? https://cmte.ieee.org/futuredirections/2020/01/03/symphony-of-humans-and-machines-or-modern-times. (accessed 21 March 2021).
- IFR (2020) Executive summary world robotics 2020 industrial robots. World Robotics Report, IFR. Available at https://ifr.org/img/worldrobotics/Executive_Summary_WR_2020_Industrial_Robots_1.pdf. (accessed 23 November 2020).
- IHCI (2020). Amazon has >200,000 kiva robots navigating through its warehouses across the globe. https://ihci.sbf.org.sg/docs/default-source/application-guides/ag28-rfw/app-guide-28_case-1.pdf?sfvrsn=8e119260_2. (accessed 19 April 2021).
- ISO (2012) ISO 8373:2012. Robots and robotic devices — Vocabulary. ISO/TC 299 Robotics.
- Jaghbeer, Y. , Hanson, R. and Johansson, M.I. (2020) Automated order picking systems and the links between design and performance: A systematic literature review. International Journal of Production Research , 58 (15), 4489–4505.
- Kadir, B.A. and Broberg, O. (2020) Human well-being and system performance in the transition to industry 4.0. International Journal of Industrial Ergonomics , 76 , 102936.
- Kaplan, A.D. , Sanders, T. and Hancock, P.A. (2019) The relationship between extroversion and the tendency to anthropomorphize robots: A Bayesian analysis. Frontiers in Robotics and AI , 5 , 135.
- Karwowski, W. (2005) Ergonomics and human factors: The paradigms for science, engineering, design, technology and management of human-compatible systems. Ergonomics 48 (5), 436–463.
- Kellogg, K.C. , Valentine, M.A. and Christin, A. (2020) Algorithms at work: The new contested terrain of control. Academy of Management Annals , 14 (1), 366–410.
- Kihlstrom, J.F. and Park, L. (2018) Cognitive psychology: Overview, in Reference Module in Neuroscience and Biobehavioral Psychology , pp. 1–14, Elsevier, Oakland, CA.
- Kostami, V. and Rajagopalan, S. (2014) Speed–quality trade-offs in a dynamic model. Manufacturing & Service Operations Management , 16 (1), 104–118.
- Kretschmer, V. , Plewan, T. , Rinkenauer, G. and Maettig, B. (2018) Smart palletisation: Cognitive ergonomics in augmented reality based palletising, in Intelligent Human Systems Integration , pp. 355–360, Springer, Cham, Switzerland.
- Kudelska, I. and Niedbal, R. (2020) Technological and organizational innovation in warehousing process – Research over workload of staff and efficiency of picking stations. E&M Economics and Management , 23 (3), 67–81.
- Kumar, S. , Mookerjee, V. and Shubham, A. (2018) Research in operations management and information systems interface. Production and Operations Management , 27 (11), 1893–1905.
- Lamballais, T. , Roy, D. and de Koster, R. (2020) Inventory allocation in robotic mobile fulfillment systems. IISE Transactions , 52 (1).
- Larco, J.A. , de Koster, R. , Roodbergen, K.J. and Dul, J. (2017) Managing warehouse efficiency and worker discomfort through enhanced storage assignment decisions. International Journal of Production Research , 55 (21), 6407–6422.
- Lewis-Beck, M.S. , Bryman, A. and Liao, T.F. (Eds.) (2004). The Sage Encyclopedia of Social Science Research Methods , Sage Publications, Thousand Oaks, CA.
- Loch, C.H. and Wu, Y. (2005) Behavioral operations management. Foundations and TrendsⓇ in Technology , Information and Operations Management, 1 (3), 121–232.
- Logistics Manager (2020) Hermes increases returns capacity with L.A.C. https://www.logisticsmanager.com/hermes-increases-returns-capacity-with-l-a-c-conveyors-automation. (accessed 21 March 2021).
- Lughofer, E. , Smith, J.E. , Tahir, M.A. , Caleb-Solly, P. , Eitzinger, C. , Sannen, D. and Nuttin, M. (2009) Human–machine interaction issues in quality control based on online image classification. IEEE Transactions on Systems, Man, and Cybernetics - Part A: Systems and Humans , 39 (5), 960–971.
- Maettig, B. , Hering, F. and Doeltgen, M. (2019) Development of an intuitive, visual packaging assistant. in Advances in Human Factors and Systems Interaction, Volume 781 of Advances in Intelligent Systems and Computing , Springer, Cham, Switzerland, pp. 19–25.
- Maettig, B. and Kretschmer, V. (2019) Smart packaging in intralogistics: An evaluation study of human-technology interaction in applying new collaboration technologies, in Hawaii International Conference on System Sciences , pp. 739–748, HICSS, Grand Wailea, Hawaii.
- Marks, M.A. , Mathieu, J.E. and Zaccaro, S.J. (2001) A temporally based framework and taxonomy of team processes. Academy of Management Review , 26 (3), 356–376.
- Mas, A. and Moretti, E. (2009) Peers at work. American Economic Review , 99 (1), 112–145.
- Masood, T. and Egger, J. (2019) Augmented reality in support of Industry 4.0—Implementation challenges and success factors. Robotics and Computer-Integrated Manufacturing , 58 , 181–195.
- Matusiak, M. , de Koster, R. and Saarinen, J. (2017) Utilizing individual picker skills to improve order batching in a warehouse. European Journal of Operational Research , 263 (3), 888–899.
- Moniz, A. and Krings, B.-J. (2016) Robots working with humans or humans working with robots? Searching for social dimensions in new human-robot interaction in industry. Societies, 6 (3), 23.
- Monostori, L. , Kádár, B. , Bauernhansl, T. , Kondoh, S. , Kumara, S. , Reinhart, G. , Sauer, O. , Schuh, G. , Sihn, W. and Ueda, K. (2016) Cyber-physical systems in manufacturing. CIRP Annals , 65 (2), 621–641.
- Olsen, T.L. and Tomlin, B. (2020) Industry 4.0: Opportunities and challenges for operations management. Manufacturing & Service Operations Management, 22 (1), 113–122.
- Otto, A. and Battaïa, O. (2017) Reducing physical ergonomic risks at assembly lines by line balancing and job rotation: A survey. Computers & Industrial Engineering , 111 , 467–480.
- Papadopoulos, A.-A. , Kordonis, I. , Dessouky, M. and Ioannou, P. (2019) Coordinated freight routing with individual incentives for participation. IEEE Transactions on Intelligent Transportation Systems, 20 (9), 3397–3408.
- Parasuraman, R. and Manzey, D.H. (2010) Complacency and bias in human use of automation: An attentional integration. Human Factors , 52 (3), 381–410.
- Parasuraman, R. and Riley, V. (1997) Humans and automation: Use, misuse, disuse, abuse. Human Factors , 39 (2), 230–253.
- Parasuraman, R. , Sheridan, T.B. and Wickens, C.D. (2008) Situation awareness, mental workload, and trust in automation: Viable, empirically supported cognitive engineering constructs. Journal of Cognitive Engineering and Decision Making, 2 , 140–160.
- Pasparakis, A. , de Vries, J. and de Koster, M. (2021) In control or under control? Human-Robot collaboration in warehouse order picking. Available at SSRN: https://ssrn.com/abstract=3816533.
- Perera, H.N. , Hurley, J. , Fahimnia, B. and Reisi, M. (2019) The human factor in supply chain forecasting: A systematic review. European Journal of Operational Research , 274 (2), 574–600.
- Petersen, C.G. , Siu, C. and Heiser, D.R. (2005) Improving order picking performance utilizing slotting and golden zone storage. International Journal of Operations & Production Management , 25 (10), 997–1012.
- Plewan, T. , Mättig, B. , Kretschmer, V. and Rinkenauer, G. (2021) Exploring the benefits and limitations of augmented reality for palletization. Applied Ergonomics , 90 , 103250.
- Proctor, R.W. and van Zandt, T. (2018). Human Factors in Simple and Complex Systems , CRC Press, Boca Raton, FL.
- Roy, D. , Nigam, S. , de Koster, R. , Adan, I. and Resing, J. (2019) Robot-storage zone assignment strategies in mobile fulfillment systems. Transportation Research Part E: Logistics and Transportation Review , 122 , 119–142.
- Roy, S. and Edan, Y. (2018) Investigating joint-action in short-cycle repetitive handover tasks: The role of giver versus receiver and its implications for human-robot collaborative system design. International Journal of Social Robotics , 12, 973–988.
- Salvendy, G. (Ed.) (2012) Handbook of Human Factors and Ergonomics , Wiley, Hoboken, NJ.
- Sanders, M.S. and E.J. McCormick (1993) Human Factors in Engineering and Design , McGraw-Hill, New York, NY.
- Sanders, T. , Kaplan, A. , Koch, R. , Schwartz, M. and Hancock, P.A. (2019) The relationship between trust and use choice in human-robot interaction. Human Factors, 61 (4), 614–626.
- Sauppé, A. and Mutlu, B. (2015) The social impact of a robot co-worker in industrial settings, in Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems , pp. 3613–3622, Seoul, South Korea. Association for Computing Machinery, New York.
- Schmidtler, J. , Knott, V. , Hölzel, C. and Bengler, K. (2015) Human centered assistance applications for the working environment of the future. Occupational Ergonomics , 12 (3), 83–95.
- Schultz, K.L. , McClain, J.O. and Thomas, L. (2003) Overcoming the dark side of worker flexibility. Journal of Operations Management , 21 (1), 81–92.
- Schultz, K.L. , Schoenherr, T. and Nembhard, D. (2010) An example and a proposal concerning the correlation of worker processing times in parallel tasks. Management Science , 56 (1), 176–191.
- Schulz, R. , Kratzer, P. and Toussaint, M. (2018) Preferred interaction styles for human-robot collaboration vary over tasks with different action types. Frontiers in Neurorobotics , 12 , Article 36. https://www.frontiersin.org/articles/10.3389/fnbot.2018.00036/full.
- See, J.E. , Drury, C.G. , Speed, A. , Williams, A. and Khalandi, N. (2017) The role of visual inspection in the 21st century. Proceedings of the Human Factors and Ergonomics Society Annual Meeting , 61 (1), 262–266.
- Sgarbossa, F. , Grosse, E.H. , Neumann, W.P. , Battini, D. and Glock, C.H. (2020) Human factors in production and logistics systems of the future. Annual Reviews in Control , 49 , 295–305.
- Statista (2020) Global warehouse automation market size. https://www.statista.com/statistics/1094202/global-warehouse-automation-market-size/. (accessed 23 November 2020).
- Staudt, F.H. , Alpan, G. , Di Mascolo, M. and Rodriguez, C.M.T. (2015) Warehouse performance measurement: A literature review. International Journal of Production Research , 53 (18), 5524–5544.
- Stein, V. and Scholz, T.M. (2019) Manufacturing revolution boosts people issues: The evolutionary need for ‘Human–Automation Resource Management’ in smart factories. European Management Review , 17 (2), 391–406.
- Stoltz, M.-H. , Giannikas, V. , McFarlane, D. , Strachan, J. , Um, J. and Srinivasan, R. (2017) Augmented reality in warehouse operations: Opportunities and barriers. IFAC-PapersOnLine , 50 (1), 12979–12984.
- Sun, J. , Zhang, D.J. , Hu, H. and van Mieghem, J.A. (2021) Predicting human discretion to adjust algorithmic prescription: A large-scale field experiment in warehouse operations. Management Science , 68 (2), 846–865.
- Tan, T.F. and Netessine, S. (2014) When does the devil make work? An empirical study of the impact of workload on worker productivity. Management Science , 60 (6), 1574–1593.
- Tan, T.F. and Netessine, S. (2019) When you work with a superman, will you also fly? An empirical study of the impact of coworkers on performance. Management Science , 65 (8), 3495–3517.
- Tappia, E. , Roy, D. , Melacini, M. and de Koster, R. (2019) Integrated storage-order picking systems: Technology, performance models, and design insights. European Journal of Operational Research , 274 (3), 947–965.
- Teigen, K.H. (1994) Yerkes-Dodson: A law for all seasons. Theory & Psychology, 4 (4), 525–547.
- The Logistics iQ (2020) Warehouse automation market. https://www.thelogisticsiq.com/research/warehouse-automation-market/. (accessed 23 November 2020).
- Tompkins, J.A. , White, J. , Bozer, Y. and Tanchoco, J. (2010) Facilities Planning , John Wiley & Sons, Hoboken, NJ.
- Udenio, M. , Vatamidou, E. , Fransoo, J.C. and Dellaert, N. (2017) Behavioral causes of the bullwhip effect: An analysis using linear control theory. IISE Transactions , 49 (10), 980–1000.
- Urda, J. and Loch, C.H. (2013) Social preferences and emotions as regulators of behavior in processes. Journal of Operations Management , 31 (1–2), 6–23.
- Van Gils, T. , Ramaekers, K., Caris, A. and de Koster, R. (2018) Designing efficient order picking systems by combining planning problems: State-of-the-art classification and review. European Journal of Operational Research , 267 (1), 1–15.
- Vischer, J.C. (2007) The effects of the physical environment on job performance: Towards a theoretical model of workspace stress. Stress and Health , 23 (3), 175–184.
- Wang, J. and Zhou, Y.-P. (2018) Impact of queue configuration on service time: Evidence from a supermarket. Management Science , 64 (7), 3055–3075.
- Wang, Z. , Sheu, J.-B. , Teo, C.-P. and Xue, G. (2021) Robot scheduling for mobile–rack warehouses: Human–robot coordinated order picking systems. Production and Operations Management , 31 (1), 95–116.
- Webster, J. and Watson, R.T. (2002) Analyzing the past to prepare for the future: Writing a literature review. MIS Quarterly , 26 (2), xiii–xxiii.
- Weidinger, F. and Boysen, N. (2018a) Scattered storage: How to distribute stock keeping units all around a mixed-shelves warehouse. Transportation Science , 52 (6), 1412–1427.
- Weidinger, F. and Boysen, N. (2018b) Storage assignment with rack-moving mobile robots in KIVA warehouses. Transportation Science , 52 (6), 1479–1495.
- Xie, L. , Thieme, N. , Krenzler, R. and Li, H. (2021) Introducing split orders and optimizing operational policies in robotic mobile fulfillment systems. European Journal of Operational Research , 288 (1), 80–97.
- Yang, H. , Kumara, S. , Bukkapatnam, S.T. and Tsung, F. (2019) The internet of things for smart manufacturing: A review. IISE Transactions , 51 (11), 1190–1216.
- Yuan, R. , Graves, S.C. and Cezik, T. (2019) Velocity-based storage assignment in semi-automated storage systems. Production and Operations Management , 28 (2), 354–373.
- Zaerpour, N. , Yu, Y. and de Koster, R.B. (2017) Optimal two-class-based storage in a live-cube compact storage system. IISE Transactions , 49 (7), 653–668.