
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In this paper, we present an algorithm for finding an approximate numerical solution for linear optimal control problems. This algorithm is based on the hybrid direction algorithm developed by Bibi and Bentobache [A hybrid direction algorithm for solving linear programs, International Journal of Computer Mathematics, vol. 92, no.1, pp. 201–216, 2015]. We define an optimality estimate and give a necessary and sufficient condition to characterize the optimality of a certain admissible control of the discretized problem, then we give a numerical example to illustrate the proposed approach. Finally, we present some numerical results which show the convergence of the proposed algorithm to the optimal solution of the presented continuous optimal control problem.
PUBLIC INTEREST STATEMENT
The optimal control theory consists in finding a control which optimizes a functional on a domain described by a system of differential equations, with box and terminal constraints on the control. This theory is applied in various fields of the engineering sciences: aeronautics, physics, finance, etc. For example, finding the minimal time necessary for moving a missile from one starting point to a destination point can be modeled as an optimal control problem, where the constraints are given by the motion equations of the missile. In this work, we have proposed a method which finds a numerical solution for the linear optimal control problem. Our method can be used for the simulation of optimal trajectories of control problems which arise in military applications, finance, etc.
1. Introduction
The optimal control theory consists in finding a control which optimizes a functional on a domain described by a system of differential equations, with box and terminal constraints on the control. This theory is applied in various fields of the engineering sciences: aeronautics, physics, finance, etc. Because of the importance of this theory, several researchers have been interested in the development of effective numerical methods for solving this type of problems. In (Gabasov & Kirillova, Citation1980; Gabasov, Kirillova, & Prischepova, Citation1995), the authors developed the adaptive method for solving linear optimal control problems. This method is then generalized for solving general quadratic optimization problems (Bibi, Citation1994, Citation1996; Brahmi & Bibi, Citation2010; Khimoum & Bibi, Citation2019; Kostina & Kostyukova, Citation2001).
In (Bentobache, Citation2013; Bentobache & Bibi, Citation2016; Bibi & Bentobache, Citation2011, Citation2015), the authors proposed a new improvement direction for the adaptive method in order to solve linear programming problems with bounded variables. This direction is called hybrid direction because some of its components take extreme values and the other components take the values of the opposite gradient.
In this paper, we present an algorithm based on this hybrid direction for solving linear optimal control problems. In a similar way to (Bibi & Bentobache, Citation2015), we define an optimality estimate and give a necessary and sufficient condition to characterize the optimality of a certain admissible control of the discretized problem. Then, we describe a numerical algorithm for finding an approximate solution and we present some numerical results in order to show its convergence.
The paper is organized as follows: In Section 2, we present the problem and give some definitions. In Section 3, we present the details of the proposed algorithm and we give a numerical example to illustrate our approach in Section 4. Finally, we conclude this paper and give some perspectives.
2. Optimal control problem
2.1. State of the problem and definitions
Consider the following terminal optimal control problem:
where is the quality criterion,
is the dynamic matrix of the system,
is the state vector of the system,
,
is a matrix of rank
,
,
is a piecewise constant control bounded by
and
. The symbol (’) designates the transposition operation.
Definition 1 Any control satisfying the constraints:
is called an admissible control of the problem .
An admissible control is said to be optimal if
An admissible control is said to be
optimal or suboptimal if
where is an accuracy chosen in advance.
The solution of the problem consists in the determination of an admissible control which, with the trajectory
, maximizes the quality criterion
:
The solution of the system is given by
where is the solution of the system
and the matrix represents the identity matrix of order
.
By replacing the expression (2) in the system , we find
If we set
then we get the following equivalent problem:
2.2. Discretization of the initial problem
We choose a subset where
and
Let the function
, be a piecewise constant control such that
Using this discretization, the problem becomes:
where
2.3. Support control
The set is called a support if the corresponding matrix
is nonsingular.
The pair formed by the admissible control
and the support
is called a support control of the problem
. The latter is said to be nondegenerate if
2.4. Increment formula of the functional
Let be a support control and
its corresponding trajectory. Using the support
, we construct the vector of the potentials
and the cocontrol vector
, as follows:
where ,
.
Consider another control
and the corresponding trajectory
Then, the increment of the functional is given by
The following theorem gives a necessary and sufficient condition of optimality for an admissible control of the problem
.
Theorem 1 (Gabasov et al., Citation1995) The following relationships:
are sufficient, and in the case of the nondegeneracy of the support control also necessary, for the optimality of the admissible control
3. An iteration of the hybrid direction algorithm
Let be a support control for the problem
and
. Define the following sets:
Then
Recall that the suboptimality estimate is given by the following formula (Gabasov et al., Citation1995):
where and
We call optimality estimate, the quantity defined by:
Theorem 2 (Necessary and sufficient condition of optimality (Bibi & Bentobache, Citation2015))
Let be a support control for the problem
and
. Then the condition
is sufficient and, in the case of the nondegeneracy of the support control
also necessary, for the optimality of the admissible control
.
Let be a starting support control of the problem
, for which the optimality criterion is not satisfied. An iteration of the hybrid direction algorithm consists in moving from
to
, where
This passage is done in two steps:
1. Change of control:
2. Change of support:
3.1. Change of control
Let be a support control for the problem
and
. We compute
with the formula (7). If
then the support control
is optimal, otherwise we define the admissible improvement direction
as follows:
where
and
This direction is called a hybrid direction (Bibi & Bentobache, Citation2015). The direction
is an admissible one for the problem
. Indeed,
To improve the objective function while remaining within the admissible domain, we compute the step along the direction
:
where
with
Then, the new admissible control will be:
where and
are defined by relationships (8) and (9) respectively.
The increment of the objective function is then
So , for
.
Corollary 1 (Bibi & Bentobache, Citation2015)
If and
then
is optimal.
3.2. Change of support
If for the support control of the problem
, we have
then we change
by
using the dual method. For this, we compute the vector
and the number
as follows:
Then, the new cocontrol will be given by:
where is the dual direction and
the dual step, which are computed as follows:
where
The following new support is then obtained:
3.3. Scheme of the hybrid direction algorithm
Let be a support control for the problem
and
a real number such that
. In order to take into account the specificity of the studied linear optimal control problem, we present in this section a slightly modified version of the algorithm presented in (Bibi & Bentobache, Citation2015). Indeed, if
and
, then we reduce the value of the parameter
by setting
and we start a new iteration with the new control
. The scheme of the hybrid direction algorithm for solving the linear optimal control problem is described in the following steps:
Algorithm 1
(1) Compute with relationships (5)-(6);
(2) Determine the sets ,
,
and
;
(3) Compute with the formula (7);
(4) If , then the algorithm stops with
, an optimal support control for the discretized problem;
(5) Compute the improvement direction using the relationship (8);
(6) Compute where
is determined by (10);
(7) Compute
and
(8) If , then
(8.1)—If , then
is optimal. Stop.
(8.2)—Else, set ,
,
and go to step (2).
(9) Compute the dual direction using the relationship (12);
(10) Compute the dual step and determine
using the relationship (13);
(11) Set
;
(12) Set ,
,
,
and go to step (2).
4. Numerical example
Consider the following problem
with
We have
Consider the admissible control
The corresponding trajectory is
and
We choose and
We take the support control
for the problem (14), with
.
Iteration 1.
We compute the optimality estimate:
so the control is not optimal.
Change of control:
We compute
The step along the direction is computed as follows:
We have then
and
Hence, the new control is given by:
We have and
so we set
Iteration 2. For this iteration, we have
We compute the direction :
We have hence
and
So
Since and
then the control
is optimal for the discretized problem, with . Therefore, the control
is an approximate solution of the original problem (14).
In order to find a good approximate solution for the original continuous problem (14), we have implemented the discretization technique using the Cauchy formula and the hybrid direction algorithm with MTALB2018a. The developed solver was tested on a computer surface pro 2, with 4GO of memory and processor Intel(R) Core(TM) i5-4300U CPU 1.90GHz 2.50GHz, running under Microsoft Window 10 operating system.
The initialization approach proposed in (Bentobache & Bibi, Citation2012) can be used to compute an initial admissible support control, however we have initialized the hybrid direction algorithm with the following obvious admissible control:
In Table , we report numerical results for different values of , where
,
,
and
represent respectively the cpu time of the discretization phase, the execution time, the number of iterations of the hybrid direction algorithm and the optimal value of the quality criterion of (14). We plot the optimal control in terms of
for
(Figure ) and we plot the optimal objective values of the linear program (4) corresponding to the problem (14) in terms of
(Figure ).
Note that for large values of , our method converges to the optimal value of the continuous original problem
. Furthermore, we can see from Graph of Figure , that the commutation time is approximately equal to 1.23 sec.
Figure 1. Graph of the optimal control in terms of for
.
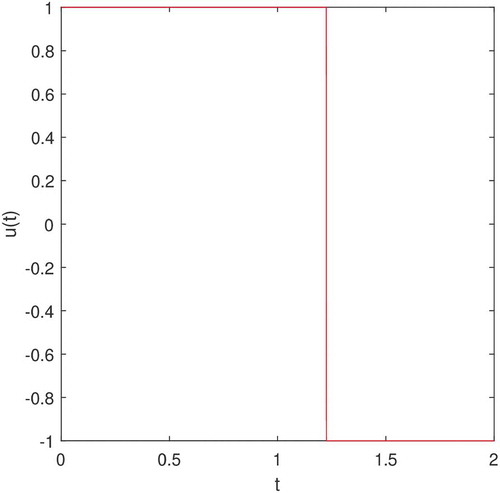
Figure 2. Graph of the objective function value in terms of .
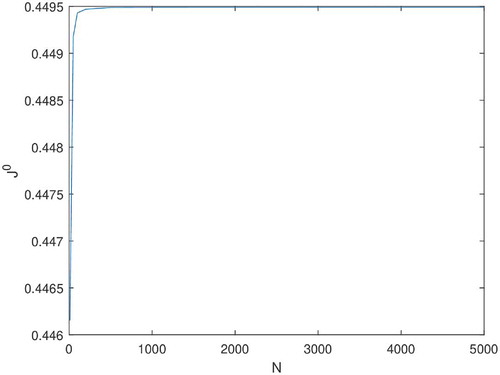
Table 1. Numerical simulation results for the problem (14)
5. Conclusion
In this paper, we applied the hybrid direction algorithm developed in (Bibi & Bentobache, Citation2015) to find an approximate optimal solution to a linear optimal control problem. A numerical example was given to illustrate the described algorithm, and some numerical simulation results were presented in order to show the convergence of our algorithm to the optimal solution of the continuous problem. In a future work, we will compare the presented approach with classical approaches on practical optimal control problems.
Correction
This article has been republished with minor changes. These changes do not impact the academic content of the article.
Acknowledgements
The authors are indebted to Dr. Mohamed Aliane who supplied them the matlab code of the Cauchy discretization technique and to the anonymous referees whose comments and suggestions have improved the quality of this paper.
Additional information
Funding
Notes on contributors
Mohamed Abdelaziz Zaitri
Mohamed Abdelaziz Zaitri received a DES degree in Mathematics from the Higher Normal School of Kouba (2011), Algeria, a master degree (2014) from the University of Bejaia. He is a PhD student at the Department of Operational Research, University of Bejaia, Algeria.
Mohand Ouamer Bibi
Mohand Ouamer Bibi received a DES degree in Mathematical Analysis (1980) from the USTHB University, Algeria, a master degree (1982) and PhD (1986) in Applied Mathematics from the University of Minsk, Belarus. He is a Full Professor at the Department of Operational Research and the leader of the research group “Optimization and Optimal Control” at the LaMOS Research Unit, University of Bejaia, Algeria.
Mohand Bentobache
Mohand Bentobache received his engineering degree in operational research (2002), master degree (2005), PhD (2013) and HDR (2015) in Applied Mathematics from the University of Bejaia, Algeria. He is an Associate Professor at the Department of Technology and the leader of the research group “Numerical Analysis and Optimization” at the Laboratory of LMPA, University of Laghouat, Algeria.
References
- Bentobache, M. (2013). On mathematical methods of linear and quadratic programming (PhD thesis), University of Bejaia, Bejaia, Algeria.
- Bentobache, M., & Bibi, M. O. (2012). A two-phase support method for solving linear programs: Numerical experiments. Mathematical Problems in Engineering, 2012. Article ID 482193, doi:10.1155/2012/482193
- Bentobache, M., & Bibi, M. O. (2016). Numerical methods of linear and quadratic programming. Germany (in French): French Academic Editions.
- Bibi, M. O. (1994). Optimization of a linear dynamic system with double terminal constraints on the trajectories. Optimization, 30(4), 359–12. doi:10.1080/02331939408843998
- Bibi, M. O. (1996). Support method for solving a linear-quadratic problem with polyhedral constraints on control. Optimization, 37(2), 139–147. doi:10.1080/02331939608844205
- Bibi, M. O., & Bentobache, M. (2011). The adaptive method with hybrid direction for solving linear programming problems with bounded variables. Proceedings of COSI’2011 pp. 80–91, 24–27 April, Algeria: University of Guelma.
- Bibi, M. O., & Bentobache, M. (2015). A hybrid direction algorithm for solving linear programs. International Journal of Computer Mathematics, 92(1), 201–216. doi:10.1080/00207160.2014.890188
- Brahmi, B., & Bibi, M. O. (2010). Dual support method for solving convex quadratic programs. Optimization, 59(6), 851–872. doi:10.1080/02331930902878341
- Gabasov, R., & Kirillova, F. M. (1980). Methods of linear programming (Vol. 3). Edition of the Minsk University, Minsk (in Russian).
- Gabasov, R., Kirillova, F. M., & Prischepova, S. V. (1995). Optimal feedback control. London: Springer-Verlag.
- Khimoum, N., & Bibi, M. O. (2019). Primal-dual method for solving a linear-quadratic multi-input optimal control problem. Optimization Letters. doi:10.1007/s11590-018-1375-2
- Kostina, E. A., & Kostyukova, O. I. (2001). An algorithm for solving quadratic programming problems with linear equality and inequality constraints. Computational Mathematics and Mathematical Physics, 41(7), 960–973.