

ABSTRACT
We propose an adaptive virtual power-based collision detection and isolation approach for robotic manipulators with link parameter estimation. The power indexes are obtained using estimated virtual velocities and contact forces. The effectiveness of the power indexes is relied on precise knowledge of link parameters, which is commonly difficult to obtain. Therefore, in this paper, we propose a series of adaptive power indexes using a link parameter estimation scheme, in order to increase the robustness to parameter uncertainties. To show the statistical performance of collision detection and isolation using the proposed approach, we conduct multiple contact tasks using a 2 degree of freedom (DOF) experimental manipulator while considering uncertainties of the link parameters, and most collisions occurred on each link of the 2-DOF manipulator can be correctly detected and isolated. Additionally, the model-based and adaptive power indexes are compared for collision detection and collision isolation, respectively. Using the adaptive power indexes, the unique threshold can be smoothly determined for collision detection; meanwhile, the correct collision isolation rate increases.
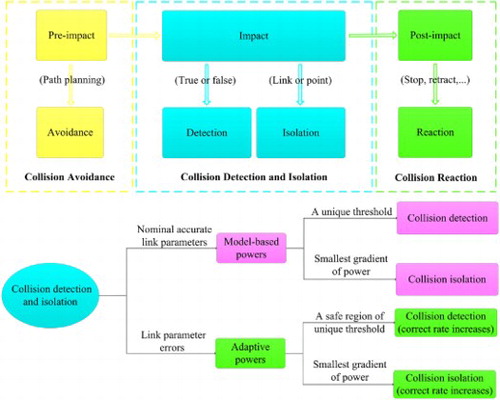
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Notes on contributors
Zhe Qiu
Zhe Qiu received his MS degree in control theory and control engineering from Ocean University of China, Qingdao, China, in 2014. He is currently working toward the PhD degree in robotics at Ritsumeikan University, Kusatsu, Japan. His current research interests include robotic manipulators, collision detection and isolation, model-based and adaptive control.
Ryuta Ozawa
Ryuta Ozawa received his PhD degree in Mechanical Engineering from Meiji University in 2001. From 2003 to 2018, he was a lecturer, an associate professor and a professor at the department of robotics, Ritsumeikan University, Japan. He is currently a professor at the department of mechanical engineering informatics, Meiji University, Japan. He is a member of the IEEE, SICE, JSME and RSJ. His research interests include robotic hands, manipulation, transmission mechanisms including tendon-driven mechanisms and series gear trains, variable stiffness actuators, bipedal robots, passivity-based control and so on.
Shugen Ma
Shugen Ma received his PhD degree in mechanical engineering science from Tokyo Institute of Technology in 1991. After worked at Komatsu Ltd. and Ibaraki University, he moved to Ritsumeikan University in 2005, where he is currently a Professor in the Department of Robotics. He is also the director of the Shanghai Robotics Institute at Shanghai University. His current research interests include the design and control theory of new types of robots, rescue robotics, and biorobotics. Dr Ma is a Fellow of the IEEE, a fellow of the JSME, and a member of the SICE and the Robotics Society of Japan. He is the general chair of IROS 2022, was an Associate Editor of the IEEE Transaction on Robotics from 2003 to 2007 and an Editor of Advanced Robotics from 2007, and serves many societies and conferences.