Figures & data
Figure 1. NREL S825 airfoil.
Figure 2. Flow at the trailing edge. The×marks the vortex creation point.
Figure 3. Controller (Equation11(11)
(11) ) with μ = 10. Error Ek with no control, uk = 0 (red). Error Ek with control (green). Control input uk (blue).
Figure 4. Error Ek for controller (Equation11(11)
(11) ) with μ = 10 (red), μ = 20 (green) and μ = 30 (blue).
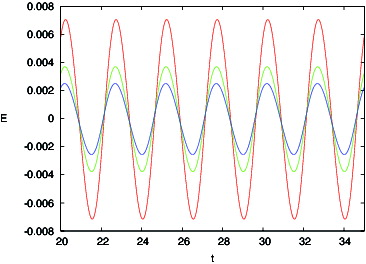
Figure 5. Controller (Equation13(13)
(13) ) with μ = 1 and Δ = 0. Error Ek (red) and control input uk (green).
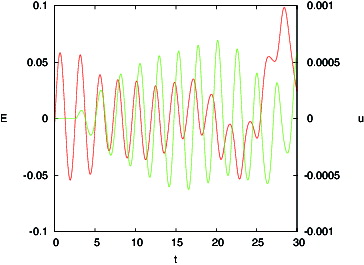
Figure 6. The controller (Equation14(14)
(14) )–(Equation16
(16)
(16) ) with μ0 = 1, μ1 = 30 and Δ = 0. Error Ek (red) and control input 30×uk (green).
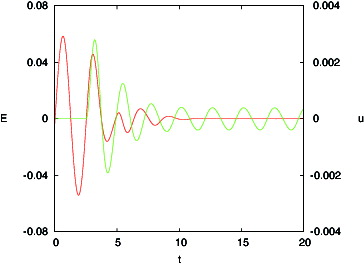
Figure 7. Error Ek for oscillatory flow past the airfoil with two vortices with no control (case 1).
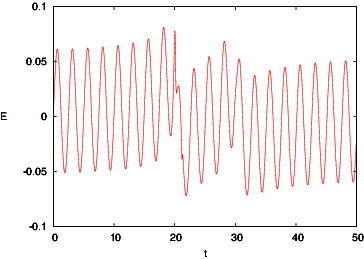
Figure 8. No control error Ek for case 1 (red). Error Ek for controller (Equation11(11)
(11) ) with μ = 30 (green).
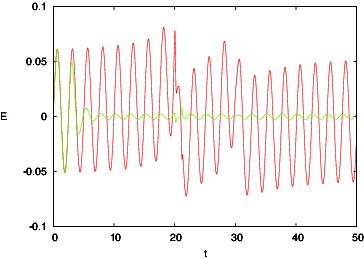
Figure 9. No control error Ek for case 1 (red). Error Ek for controller (Equation14(14)
(14) -Equation16
(16)
(16) ) with μ1 = 30 (green), μ0 = 1 and Δ = 0 (green).
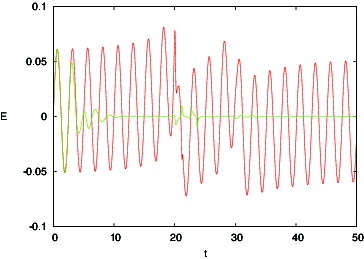
Figure 10. No control error Ek for case 1 (red). Control input uk for controller (Equation14(14)
(14) )–(Equation16
(16)
(16) ) with μ0 = 30, μ1 = 1 and Δ applied to case 1 (green).
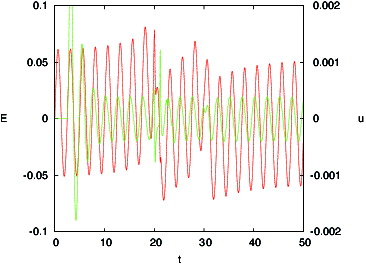
Figure 11. No control error Ek for case 4 (red). Error Ek for controller (Equation14(14)
(14) )–(Equation16
(16)
(16) ) with μ0 = 30, μ1 = 1 and Δ = 0 (green) (error scaled by 100, magenta), and control input uk (blue).
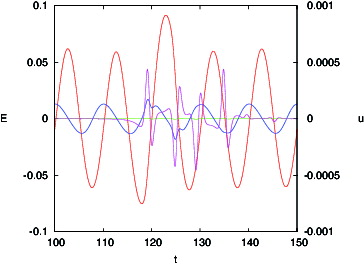
Figure 12. No control error Ek for case 6 (red). Error Ek for controller (Equation14(14)
(14) )–(Equation16
(16)
(16) ) with μ0 = 30, μ1 = 1 and Δ = 0 applied to case 6 (green).
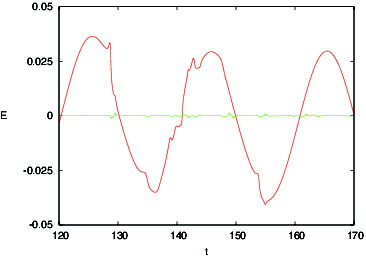
Figure 13. No control error Ek for case 6 (red). Control input uk for controller (Equation14(14)
(14) )–(Equation16
(16)
(16) ) with μ0 = 30, μ1 = 1 and Δ = 0 applied to case 6 (green).
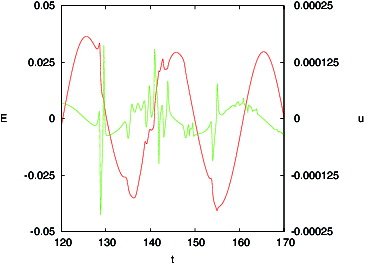
Table 1. Parameters for selected cases using the two-term ILC.
Table 2. Error norms for selected cases using the two-term ILC.
Figure 14. Error Ek for controller (Equation14(14)
(14) )–(Equation16
(16)
(16) ) with μ0 = 30, μ1 = 1 and Δ = applied to case 1 with no delay (red), λ = 100 and λ = 10 (blue). The errors for no delay and with λ = 100 are almost the same when plotted at this level.
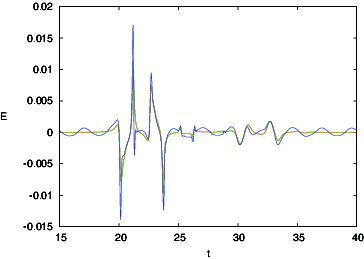
Figure 15. Error Ek for controller (Equation14(14)
(14) )–(Equation16
(16)
(16) ) with μ0 = 30, μ1 = 1 and Δ = 0 applied to case 1 with no delay (red), λ = 1 (green), λ = 0.1 (blue) and λ = 0.01 (magenta).
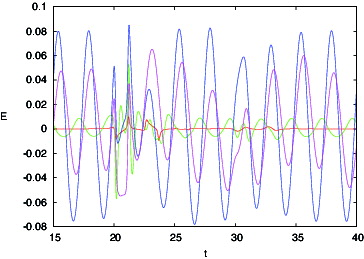
Figure 16. Control inputs uk for the actuator delays λ in and . No delay (red), λ = 100 (green), λ = 10 (blue), λ = 1 (magenta), λ = 0.1 (light blue), λ = 0.01 (yellow).
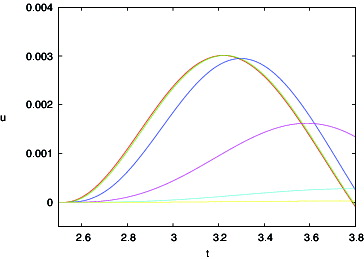
Figure 17. Error norms for controller (Equation14(14)
(14) )–(Equation16
(16)
(16) ) with μ0 = 30, μ1 = 1 and Δ = 0 for different λ; left,
and right,
. Case 1 (red), case 2 (green) and case 3 (blue). R is the ratio of the norms against the values for no delay.
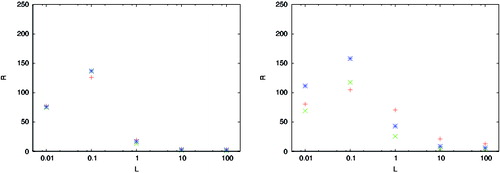
Figure 18. Error Ek for controller (Equation14(14)
(14) )–(Equation16
(16)
(16) ) with μ0 = 30, μ1 = 1 and Δ = 0 applied to case 6 with no delay (red) and λ = 10 (green). The control with λ = 100 produces identical results to that with no delay at this scale.
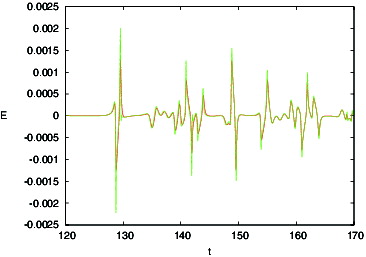
Figure 19. Error Ek for controller (Equation14(14)
(14) )–(Equation16
(16)
(16) ) with μ0 = 15, Δ = 0 and μ1 = 100 applied to case 6 with no delay (red), λ = 1 (green), λ = 0.1 (blue) and λ = 0.01 (magenta).
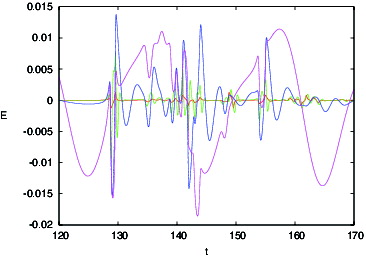
Figure 20. Error norms for controller (Equation14(14)
(14) –Equation16
(16)
(16) ) with μ0 = 30, μ1 = 1 and Δ = 0 for different λ; left,
and right,
. Case 4 (red), case 5 (green) and case 6 (blue). R is the ratio of the norms against the values for no delay.
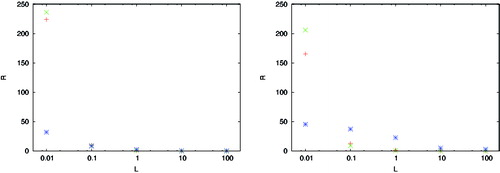
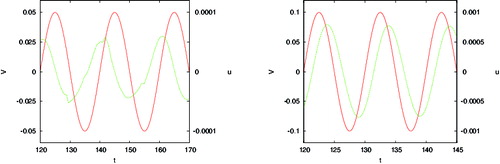
Figure 21. Free stream velocity oscillation (red) and control input (green) for case 5 (left) and case 6 (right).