Figures & data
Table 1. Notations and example values.
Figure 1. Overview of the manual sorting mode (top) and the cobot sorting mode (bottom).
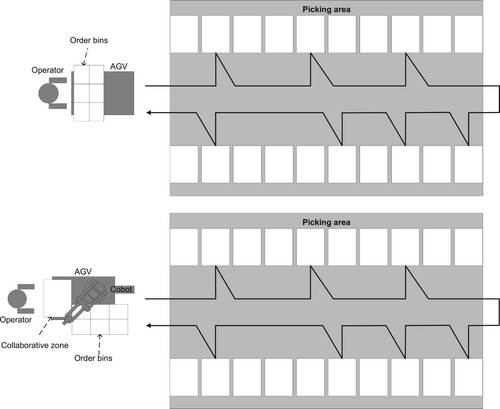
Table 2. Example of a pick list for one order.
Table 3. Example of a batch pick list for a setup with  , .
, .
Table 4. Equipment related costs associated with the two modes.
Table 5. Types and example values of error correction costs.
Table 6. Example values for error probabilities.
Figure 2. Main cost components in €/year (logarithmic scale) of the two modes with respect to operator cost (left), equipment cost (middle), and quality cost (right). Boxes represent average cost and standard deviation. Bracketed lines represent maximum and minimum cost.
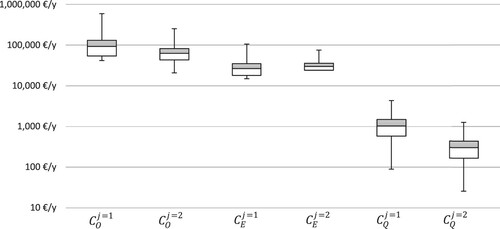
Figure 3. Main effect plot of , showing effect size (vertical axis) and factor levels (horizontal axis) for the considered factors.
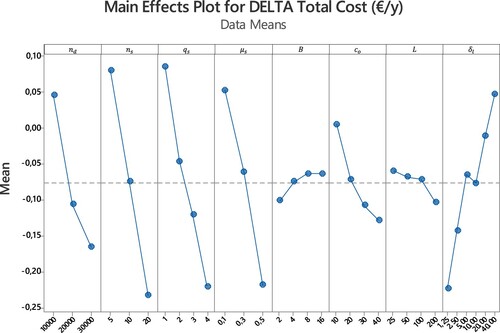
Figure 4. Interaction plot with respect to , showing size of interaction effects (vertical axis) and the factor levels used for each parameter (horizontal axis).
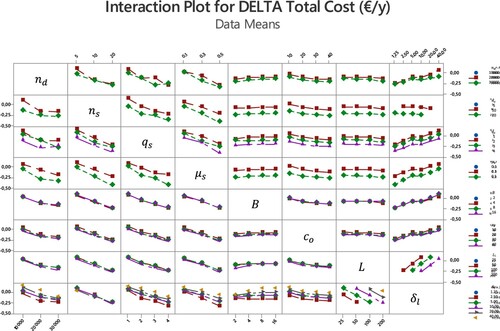
Figure 5. Relative cost difference between the manual sorting mode and the cobot sorting mode with respect to (vertical axis) and
(horizontal axis) under different levels of
and
. Grey areas indicate a more profitable manual sorting mode and white areas indicate a more profitable cobot sorting mode.
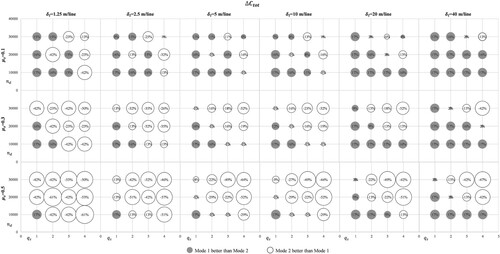
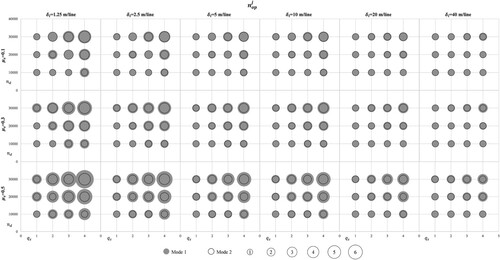
Figure 6. The average number of picking units required in mode 1 and 2 with respect to (vertical axis) and
(horizontal axis) under different levels of
and
. Grey circle without border indicate the average number of picking units required with mode 1, and hollow circle with border indicate the average number of picking units required with mode 2.