
Figures & data
Figure 1. A calculation from the input to the output in the convolutional layer.
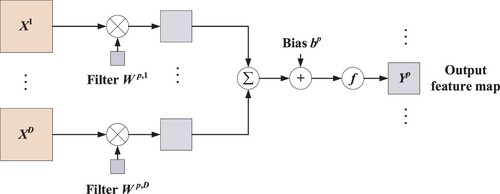
Figure 2. The overall framework of the proposed method.
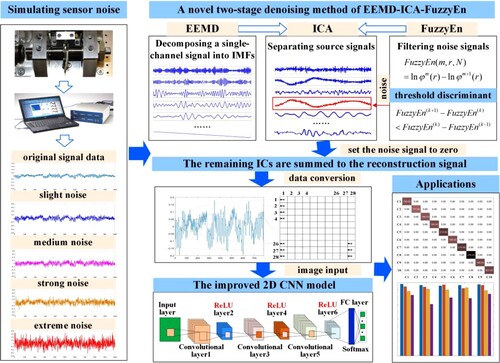
Figure 3. Test rig of rolling-element bearing.
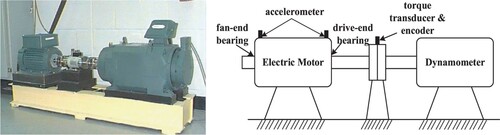
Table 1. The structure of the data sets.
Figure 4. Different levels of Gaussian noise disturbance in normal bearing.
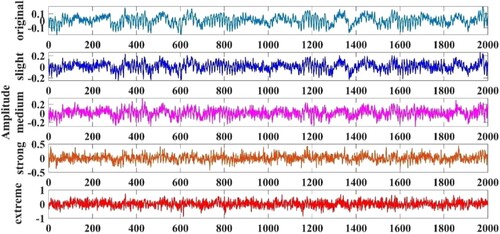
Figure 5. The decomposition results using EEMD of normal bearing.
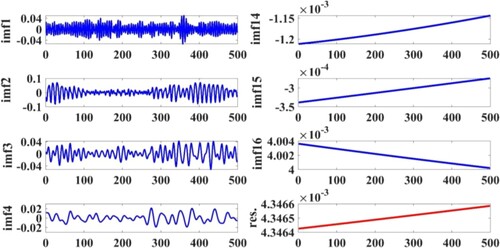
Figure 6. The separation results using Fast ICA-FuzzyEn under normal condition.
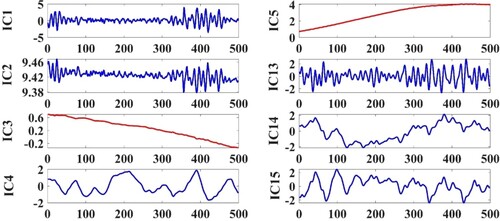
Figure 7. The original, noisy, and denoised signal of C3.
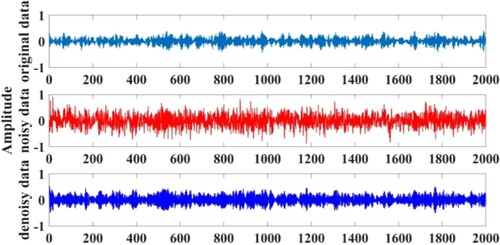
Figure 8. Evaluation denoising results among different noise levels.
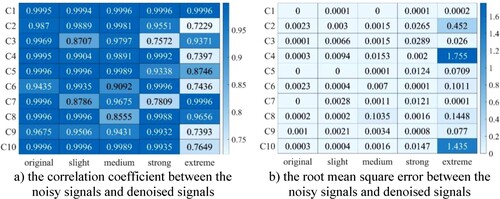
Table 2. Parameter settings of the EEMD-ICA-FuzzyEn and CNN model.
Figure 9. The repeated diagnosis results in denoised data with different noise levels.
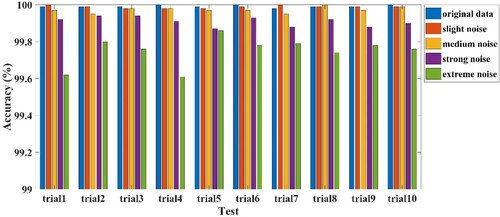
Figure 10. Confusion matrix with the original data and extreme noise as representatives.
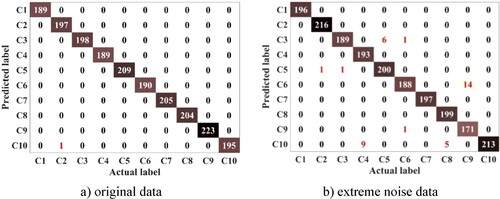
Table 3. Fault diagnosis performance comparison of noisy data and denoising data.
Table 4. Comparison of diagnostic accuracy with other denoising methods.
Table 5. Comparison of diagnostic accuracy with other DL approaches.
Data availability statement
The data that support the findings of this study are openly available on the Case Western Reserve University Bearing Data Centre Website at https://engineering.case.edu/bearingdatacenter/download-data-file.