Figures & data
Figure 1. Geometric relation between Ω and .
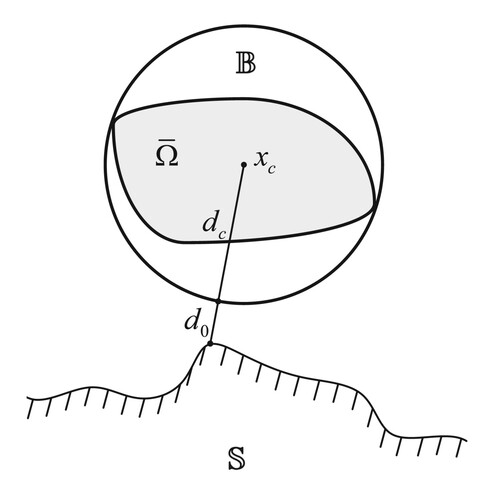
Figure 2. Generalised PID control, d = 0.0.
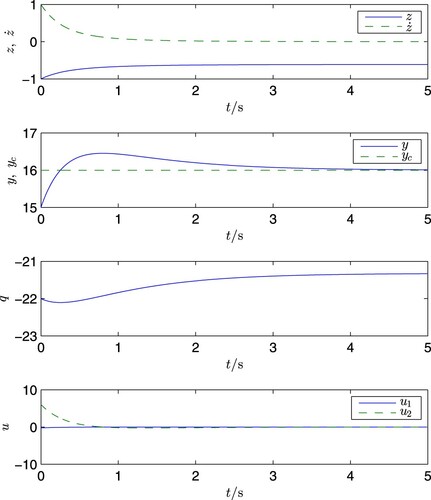
Figure 3. Generalised PID control, d = 5.0.
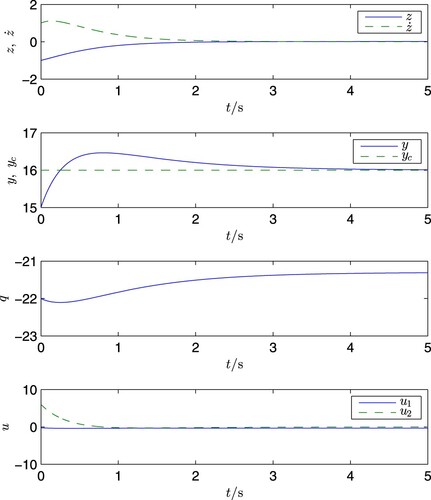
Figure 4. Model reference control, d = 0.0.
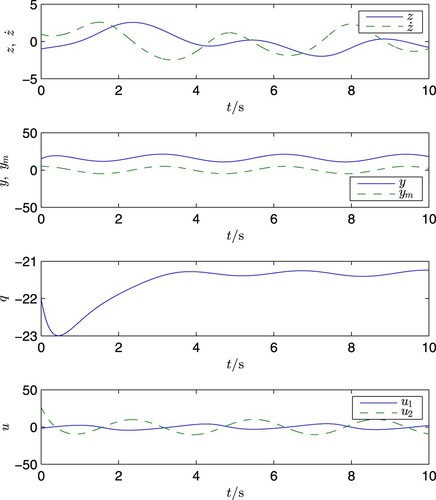
Figure 5. Model reference control, d = 5.0.
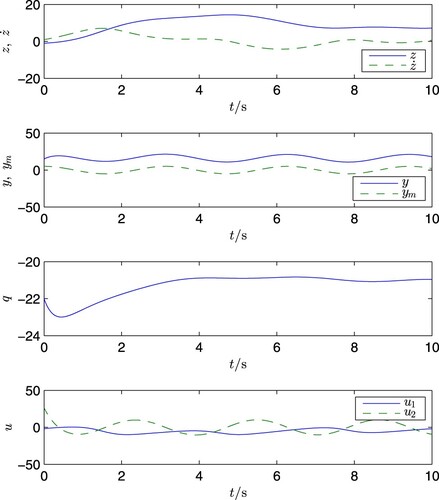
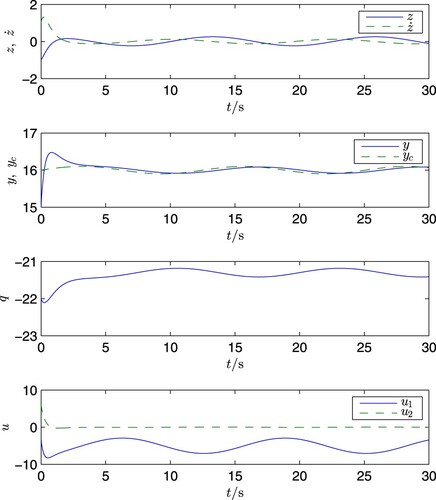
Figure 6. Generalised PID control, Case A.
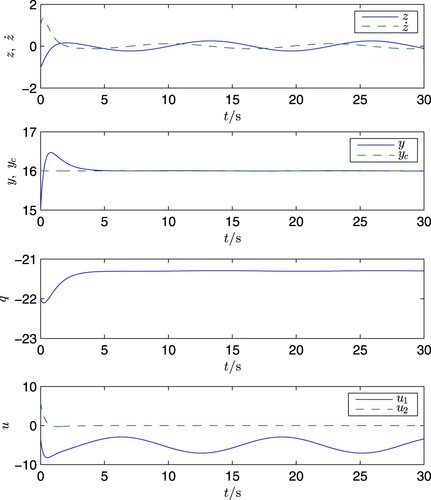
Figure 7. Generalised PID control, Case B.