Figures & data
Figure 1. In the tested photogrammetric monitoring workflow digital elevation models (DEM) are generated from two image blocks (referred to as epochs as they are part of a monitoring program) and are compared to create the DEM of difference (DoD) to identify and quantify change. © J. Paul Getty Trust
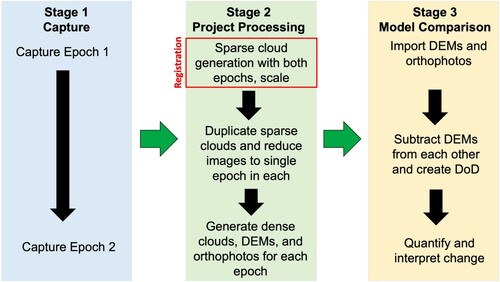
Figure 2. The steps taken to generate a three-dimensional model. Step 1: Overlapping images are captured and then imported into the photogrammetric software. Step 2: The images are processed to create a sparse cloud. Step 3: A dense cloud is generated based on the sparse cloud. Step 4: The dense cloud can then be processed into a digital elevation model (DEM) where the relative heights are represented as a heatmap. © J. Paul Getty Trust
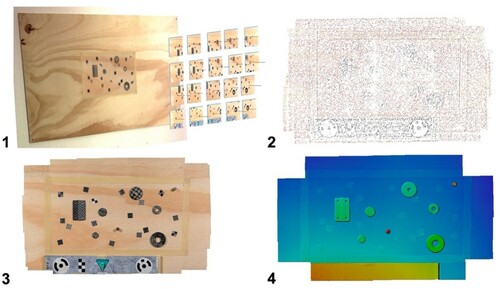
Figure 3. Patterned adhesive labels were affixed to the monitoring area to create distinct features for photogrammetric model generation (top). Objects numbered 1–8 (with the prefix H) were added to the board (bottom) and their height on the board was determined by taking and averaging measurements using a vernier caliper on four points of each object. © J. Paul Getty Trust
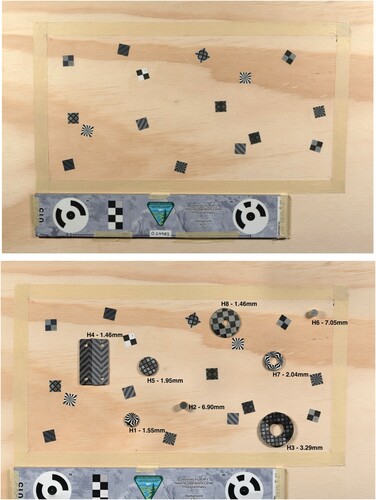
Figure 4. The LED capture set-up with the Sony α7R II on a tripod and two LED panels angled 45° towards the board. External light was blocked out to ensure controlled lighting conditions. © J. Paul Getty Trust

Table 1. Trials undertaken to determine the accuracy and precision of the workflow.
Figure 5. The results of the control (Trial 1) comparing Epoch 1 and Epoch 2 show the change detected at each label point and its variation from zero. The small deviation from zero in the dataset shows that the epochs were closely aligned. © J. Paul Getty Trust
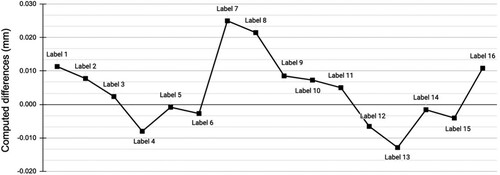
Table 2. Mean detected change and standard deviation on the DoD from the control and lighting trials.
Figure 6. The orthophotos generated from the light sources created different shadow patterns on the test board. Only the ring flash resulted in no visible shadows on the orthophoto. © J. Paul Getty Trust
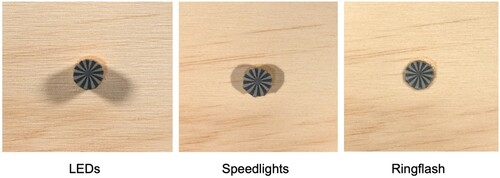
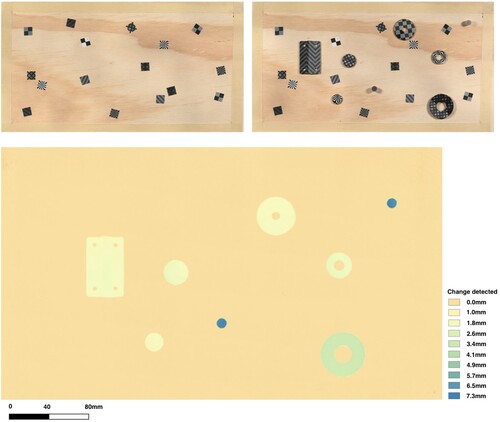
Figure 7. In Trial 2, the DEM of difference (DoD) (bottom) reflecting the detected change between Epoch 2 (top left) and Epoch 3 (top right) is shown as a heatmap. © J. Paul Getty Trust