
Figures & data
Figure 1. Illustrations of different yaw instabilities for a tractor (blue) and semitrailer (grey). (a) Jackknifing. (b) Trailer swing and (c) Combination spin-out.
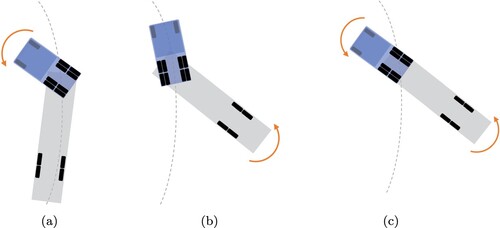
Figure 2. Free-body diagrams of the nonlinear single-track model for the AHV [Citation23,p.296]. Forces and moments are shown in blue, velocities in green.
![Figure 2. Free-body diagrams of the nonlinear single-track model for the AHV [Citation23,p.296]. Forces and moments are shown in blue, velocities in green.](/cms/asset/bb0ac6cd-62a8-4ce7-8036-9dfef59a46e8/nvsd_a_2276767_f0002_oc.jpg)
Figure 3. Paths followed by an AHV for two different braking manoeuvres with km/h,
, R = 72 m. Braking starts at
. (a)
and
. Jackknifing occurs and simulation is terminated when the articulation angle reaches
and (b)
and
. No yaw instability occurs and simulation is terminated when the tractor reaches zero velocity.
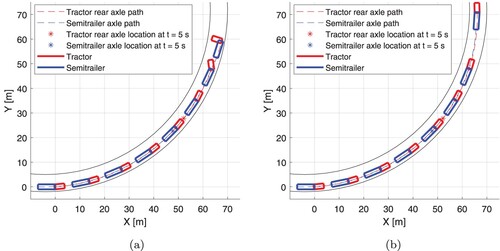
Figure 4. Eigenvalues of the linearised single-track model, actuated with five different longitudinal force pairs. is the friction utilisation of the tractor's rear axle and
is the friction utilisation of the semitrailer's axle.
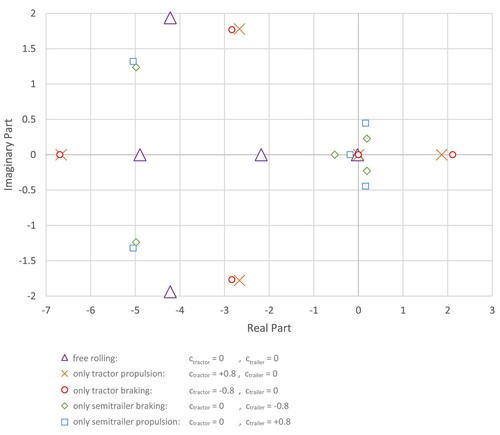
Table 1. Eigenvalues of the nonlinear single-track model actuated with 13 different longitudinal force pairs.
Figure 5. AHV exhibiting a trailer swing due to semitrailer braking, with at
.
Figure 6. Changes in maximum articulation angle and side-slip angle deviations due to different values on the operational parameters: turning radius (first-row plots), initial speed (second-row plots), and friction coefficient (third-row plots) for three different braking manoeuvres. (a) (b)
(c)
![Figure 6. Changes in maximum articulation angle and side-slip angle deviations due to different values on the operational parameters: turning radius (first-row plots), initial speed (second-row plots), and friction coefficient (third-row plots) for three different braking manoeuvres. (a) [ctractorctrailer=−0.80] (b) [ctractorctrailer=0−0.8] (c) [ctractorctrailer=−0.8−0.8]](/cms/asset/eda407a9-273f-443b-a80a-f8451867fc2c/nvsd_a_2276767_f0006_oc.jpg)
Figure 7. Effects of various friction utilisation ratios, and
. (a)
and
and (b)
and
.
![Figure 7. Effects of various friction utilisation ratios, ctractor and ctrailer. (a) ctractor∈[−1,1] and ctrailer=0 and (b) ctractor=0 and ctrailer∈[−1,1].](/cms/asset/c41e1d5f-3bed-42c6-bb69-8523411e925a/nvsd_a_2276767_f0007_oc.jpg)
Figure 8. Maximum side-slip angle and articulation angle deviations for braking at six different speeds, according to the nonlinear single-track model.
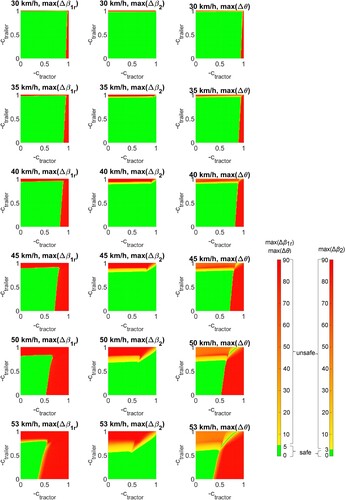
Figure 9. SOE obtained from the nonlinear single-track model of a braking AHV.
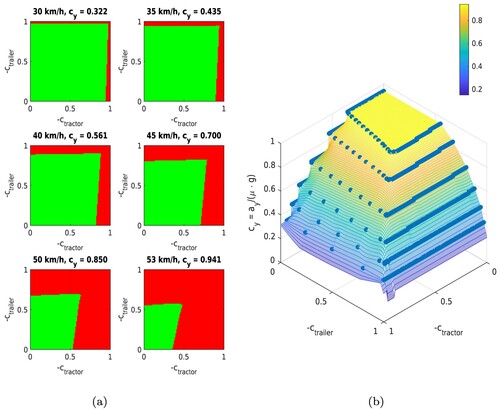
Figure 10. Different yaw instability modes shown on the SOE.
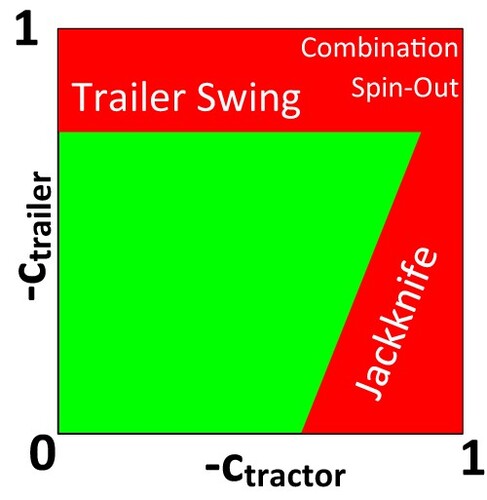
Figure 11. SOE obtained from the nonlinear single-track model of an accelerating AHV.
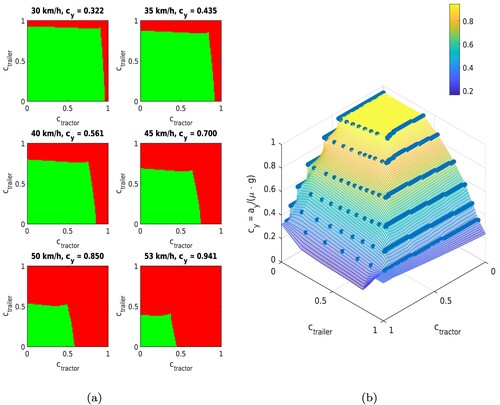
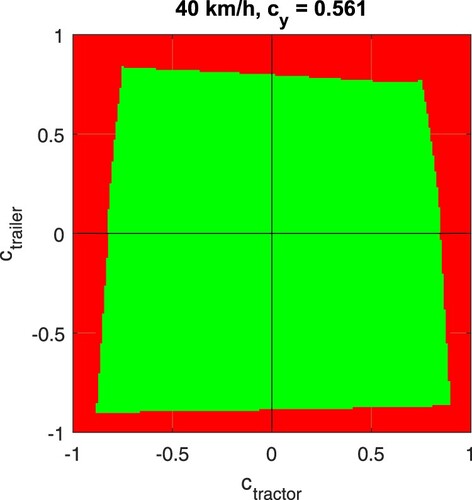
Figure 12. Slice of the SOE obtained from the nonlinear single-track model for 40 km/h () for any combination of propulsion and braking forces.
Table
Table