

ABSTRACT
Motor-skill learning for complex robotic tasks is a challenging problem due to the high task variability. Robotic clothing assistance is one such challenging problem that can greatly improve the quality-of-life for the elderly and disabled. In this study, we propose a data-efficient representation to encode task-specific motor-skills of the robot using Bayesian nonparametric latent variable models. The effectivity of the proposed motor-skill representation is demonstrated in two ways: (1) through a real-time controller that can be used as a tool for learning from demonstration to impart novel skills to the robot and (2) by demonstrating that policy search reinforcement learning in such a task-specific latent space outperforms learning in the high-dimensional joint configuration space of the robot. We implement our proposed framework in a practical setting with a dual-arm robot performing clothing assistance tasks.
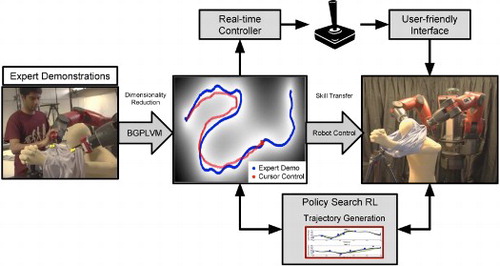
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Nishanth Koganti http://orcid.org/0000-0003-1319-4150
Tomohiro Shibata http://orcid.org/0000-0002-8766-4250
Kazushi Ikeda http://orcid.org/0000-0003-3330-6121
Additional information
Funding
Notes on contributors
Nishanth Koganti
Nishanth Koganti received his B.Tech. in Electrical Engineering from Indian Institute of Technology Jodhpur, India in 2012. He recieved his M.Eng., and Ph.D in Information Science from Nara Institute of Science and Technology in 2014, and 2017 respectively. He was a project researcher with the Graduate School of Engineering of the University of Tokyo from 2017 to 2018. He was with Graduate School of Science and Technology, Nara Institute of Science and Technology, as an assistant professor from 2018 to 2019. He recieved the best application paper award in the IEEE international conference on IROS, 2015.
Tomohiro Shibata
Tomohiro Shibata received Ph.D from the University of Tokyo, Japan in 1996, continued his robotics study as a JSPS researcher, and then worked on computational neuroscience research at ATR as a JST researcher. After working as an associate professor at Nara Institute of Science and Technology, he currently works as a professor at Kyushu Institute of Technology, Kitakyushu, Japan. He is a member of working group for the national strategic special zone in Kitakyushu focusing on nursing-care robots. He was an editorial board member of Neural Networks and an executive board member of the Robotics Society of Japan (RSJ). He is currently an executive board member of Japanese Neural Network Society, a committee member of RSJ for international affairs, and a governing council member of The Robotics Society (former Robotics Society of India).
Tomoya Tamei
Tomoya Tamei is a project lecturer at the Center of Mathematical and Data Sciences, Kobe University, Japan. He received his Ph.D. degree from Nara Institute of Science and Technology in 2009. His research interests are robotics, motor neurophysiology, and machine learning. He received the best paper award from the Japanese Neural Network Society (2015) and IROS 2015 Best Application Paper Award (2015).
Kazushi Ikeda
Kazushi Ikeda received his B.E., M.E., and Ph.D in mathematical engineering and information physics from the University of Tokyo in 1989, 1991, and 1994. He was a research associate with the Department of Electrical and Computer Engineering of Kanazawa University from 1994 to 1998. He was a research associate of Chinese University of Hong Kong for three months in 1995. He was with Graduate School of Informatics, Kyoto University, as an associate professor from 1998 to 2008. Since 2008, he has been a full professor of Nara Institute of Science and Technology. He was the editor-in-chief of the Journal of the Japanese Neural Network Society and is currently an action editor of Neural Networks, and an associate editor of IEEE Transactions on Neural Networks and Learning Systems.